0% found this document useful (0 votes)
1K views43 pagesuCOS-II Kernel Structure
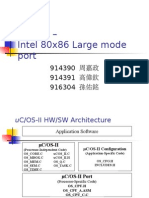
uCOSII is a real-time kernel that can manage up to 63 tasks. It uses a priority-based preemptive scheduling algorithm. Each task has a Task Control Block (TCB) that contains information like its stack pointer, priority, and state. Interrupts and tasks can access shared resources using methods like disabling interrupts, disabling scheduling, or using semaphores to implement mutual exclusion.
Uploaded by
Vishal PatelCopyright
© Attribution Non-Commercial (BY-NC)
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
1K views43 pagesuCOS-II Kernel Structure
uCOSII is a real-time kernel that can manage up to 63 tasks. It uses a priority-based preemptive scheduling algorithm. Each task has a Task Control Block (TCB) that contains information like its stack pointer, priority, and state. Interrupts and tasks can access shared resources using methods like disabling interrupts, disabling scheduling, or using semaphores to implement mutual exclusion.
Uploaded by
Vishal PatelCopyright
© Attribution Non-Commercial (BY-NC)
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
/ 43