ANALOG POSITIONERS
Installation & Operating Instructions
for Intrinsically Safe EaziCal IR Positioner
Mounting Instructions
Note: All AVID Products are factory equipped with Tyco direct mounting. For standard Namur
mounting see Appendix A.
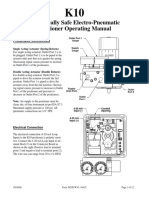
FIG. 1
EaziCal IR Positioner
1. Operate the actuator to full closed position.
* Drive Insert
ModMount
2. Fasten the EaziCal IR positioner to the actuator using (4) 10-32 x .50hex head screws
and (4) #10 washers while engaging its output shaft into the actuators input (fig.1).
Actuator
Drive insert must be provided with Keystone/Tyco actuators
for ModMount installations.
FIG. 2
3. Loosen the (4) captive screws which fasten
the EaziCal IR Positioner cover. Twist cover
approximately 45and lift up (fig.2). (Wiring
diagram inside EaziCal IR Positioner cover).
TWIST COVER 45,THEN LIFT STRAIGHT UP
4/28/03
Tech-321/D.W.O14722
Page 1 of 14
�Pneumatic Connection
Single Acting Actuator (Spring Return):
For single acting actuators Outlet Port 2 is to be
plugged. Outlet Port 1 is to be piped to the actuator inlet port that acts against the spring.
(Increasing signal causes pressure to increase
in Outlet Port 1 of the positioner).
Outlet Port 1
Gauge
Supply
Gauge
Double Acting Actuator (Double Return):
For double acting actuators Outlet Port 2 is
piped to drive the actuator towards the fail position. Outlet Port 1 is piped to drive the actuator
away from the fail position. (Increasing signal
causes pressure to increase in Outlet Port 1 of
the positioner and pressure to decrease in Outlet Port 2 of the positioner).
Outlet
Port 1
B
Outlet
Port 2
Supply
(Inlet Port)
Thread
Identification *
*Note: Air supply to the positioner must be
clean, dry, oil free instrument air per ISA-S7.3.
Maximum supply pressure is 120 psi. All pneumatic connections are 1/4 NPT or 1/4 BSP.
See manifold for Identification of thread type.
The electrical connection (4-20 mA Loop Input)
to the EaziCal positioner is polarity sensitive.
Connect the 4-20 mA Loop Input to terminal
block J1 on the Connector Board as shown on
the right (Positive lead to terminal point 3 and
negative lead to terminal point 2). The wire size
can range from 20 to 14 AWG. J1 is removable
(plugs into a pin header soldered to the PCB) for
ease of wiring and service.
4/28/03
*Thread Identification
B = 1/4 BSP
Without
Marking
4-20 mA
Input (-)
Electrical Connection
Exhaust
Port
Conduit
Opening
4-20 mA
Input (+)
Tech-321/D.W.O14722
= 1/4 NPT
CCW
SW1
J2
CW
J3
J1
Page 2 of 14
�Position Sensor Initial Angle (Setting Mode)
The Eazicals Position Sensor, which measures the absolute position of the valve, has a limited operating angle
for proper position measurement. The Position Sensor must remain within the operating angle in both the open and
fail valve positions. This is accomplished by initially setting the Position Sensor angle while the valve is in the fail
position. The Eazical has a mode of operation to accomplish the setting of this initial angle using the following steps.
1.
Apply loop current to the positioner and
adjust to 12 mA.
2.
Press & hold both the high and low buttons
until the actuator is driven to span position.
Release both buttons to remove air pressure
from Outlet Port 1.
3.
If the valve fails clockwise and strokes
counter-clockwise, then set switch SW1 to
the CCW position. If the valve fails counterclockwise and strokes clockwise, then set
switch SW1 to the CW position (see figure to
right).
4.
With no buttons pressed and the actuator in
the fail position, push the Main Shaft Gear
(larger of the two) down until it disengages
from its shaft locking position.
5.
Rotate the Main Shaft Gear (both gears will
turn), until only the green LED is flashing.
Switch
(SW1)
Main Shaft
Gear
Position Sensor
Gear
CCW
SW1
J2
CW
J3
J1
Note: If the LED is already green, skip 5 and go
to 6.
6.
Pull up the Main Shaft Gear allowing it to reengage on the shaft locking it into position.
7.
Press and hold the High Calibration button
until the valve fully strokes away from the fail
position while watching the LEDs. The red or
yellow LEDs must not light as long as the
High Cal button is being held down. If the red
or yellow LED lights while the High Cal button
is being held down, then the Position Sensor
Orientation and Actuator air piping are out of
phase. Correct the phase error by changing
the position of SW1 and repeat this procedure
starting from step 2.
8.
Release the High Calibration button and watch the red LED. The red LED will flash until the valve reaches the fail
position.
9.
Press the Low Calibration button to exit the Position Sensor Setting Mode (if no buttons are pushed then
this mode will time out automatically in about 2 minutes).
4/28/03
Tech-321/D.W.O14722
Page 3 of 14
�Calibrating The EaziCal Positioner
Once the Eazical and actuator have been connected and the initial angle has been set. Low and High
Calibration can be performed on the EaziCal. Low Calibration refers to the input current value that drives
the valve into the fail position. High Calibration refers to the input current value that drives the valve into
the Span Position. Calibration adjusts parameters internal to the EaziCal that are specific to the actuator,
and input current values. The parameters that are adjusted are, the Gain of the EaziCal servo loop. the
end position (Zero/Span) of the valve travel, and Drop-Off point (input current level at which the transducer is forced to the extreme position, to insure that the valve is fully open or closed). The calibration
routine uses the input current value to set its internal adjustment, so it is important that the input current
does not change during the calibration routine.
** To Do a Low Calibration: (Zero Position)
1. Set the Input Current level to the value that drives the valve into the fail position (typically 4 mA).
2. Start the Low Calibration routine by pressing and holding the LOW CAL button on the EaziCal
until the Yellow LED flashes or by pressing the LOW button on the IR Remote (may require security code entry).
3. Observe the flashing Yellow LED on the EaziCal which denotes the various stages of the calibration routine:
a.) Flashing 1 time indicates Zero position set routine.
b.) Flashing 2 times indicates Transducer Self Calibration routine.
c.) Flashing 3 times indicates Gain setting routine.
4. When the Green LED begins to flash the Calibration is completed. If the Red LED flashes this is
an indication that one of the Calibration routines could not be completed. The number of Red
LED flashes indicates the calibration routine that failed.
** To Do a High Calibration: (Span Position)
1. Set the Input Current level to the value that drives the valve into the span position (typically 20
mA).
2. Start the High Calibration routine by pressing and holding the HIGH CAL button on the EaziCal
until the Yellow LED flashes or by pressing the HIGH button on the IR Remote (may require
security code entry).
3. Observe the flashing Yellow LED on the EaziCal which denotes the various stages of the calibration routine:
a.) Flashing 1 time indicates Span position set routine.
b.) Flashing 2 times indicates Transducer Self Calibration routine.
c.) Flashing 3 times indicates Gain setting routine.
4. When the Green LED begins to flash the Calibration is completed. If the Red LED flashes
this is an indication that one of the Calibration routines could not be completed. The number of Red LED flashes indicates the calibration routine that failed.
Calibration Complete:
** Note: For split range enter desired input values during low & high calibration.
4/28/03
Tech-321/D.W.O14722
Page 4 of 14
�Advanced Functions
The Eazical has the ability to change the calibration settings (Gain, Zero, Span, and Drop-Off) manually. This function was intended to make minor changes in the calibration values after doing the Low
and High calibration. Some examples where this might be used are decreasing the Gain if the valve still
shows some overshoot on rapid position changes, or increasing the High Drop-Off point so it will not be
in effect at 20mA. Exercise caution if using the manual calibration, mis-adjustment of these settings on the Eazical positioner can result in erratic behavior or failure of operation, and may
require resetting the EEPROM before auto-calibration can be performed again.
To Do a Manual Calibration Adjustment:
1. Apply Input Current to the Eazical (typically 12 mA).
2. Start the Manual Calibration routine by pressing and holding the Function (center) button on the
Eazical until the Green and Yellow LED flashes.
3. Observe the flashing Green and Yellow LED on the Eazical which denotes the various stages of
the manual calibration routine, pressing the Function (center) button again advances to the next
stage:
a.) Flashing 2 time indicates Manual Gain adjustment.
b.) Flashing 3 times indicates Zero position adjustment.
c.) Flashing 4 times indicates Low Drop-Off adjustment.
d.) Flashing 5 times indicates Span position adjustment.
e.) Flashing 6 times indicates High Drop-Off adjustment.
4. To alter any characteristics of the positioner follow the following steps:
a.) Manual gain Increase the positioner gain by pressing the High Cal button. Decrease the
Positioner gain by pressing the Low Cal button. Continue to increase or
decrease the gain by repeatedly pressing the buttons. The maximum adjustment has been achieved when the red LED lights.
b.) Zero position [To adjust the zero position to a point other than the hard stop of the valve the
Low calibration of the positioner must have been performed at a current
slightly lower than the zero position current. (Ex. If the zero position current is
4.0 mA the Low Calibration as described in the previous section needs to be
performed at 3.9 mA.)]
Increase the zero position by pressing the Low Cal button. Decrease the zero
position by pressing the High Cal button. Continue to increase or decrease the
zero position by repeatedly pressing the buttons.
c.) Low Drop-Off Increase the mA input signal that the positioner drops output port 1 pressure
by pressing the Low Cal button. Decrease the mA input signal that the positioner drops output port 1 pressure by pressing the High Cal button. Continue
to increase or decrease the drop-off position by repeatedly pressing the buttons.
d.) Span Position [To adjust the span position to a point other than the hard stop of the valve the
High calibration of the positioner must have been performed at a current
slightly higher than the span position current. (Ex. If the span position current
is 20.0 mA the Highcalibration as described in the previous section needs to
be performed at 20.1mA.)] Decrease the span position by pressing the High
Cal button. Increase the span position by pressing the Low Cal button.
4/28/03
Tech-321/D.W.O14722
Page 5 of 14
�Continue to increase or decrease the span position by repeatedly pressing the
buttons.
e.) High Drop-off Decrease the mA input signal that the positioner drops output port 2 pressure
by pressing the High Cal button. Increase the mA Input signal that the positioner drops output port 2 pressure by pressing the Low Cal button. Continue
to increase or decrease the drop off position by repeatedly pressing the buttons.
5. The Input Current can be changed during the test to observe the adjustment effects on the Eazical behavior.
6. To save the adjustments and exit the Manual Calibration Mode the Function (center) button must
be held for approximately 5 seconds (green and yellow flashing LEDs will change to flash just
green when adjustments are saved) This procedure to save and exit can be performed from any
stage during the Manual Calibration.
7. Pressing the Function (Center) button during the High Drop-Off adjustment exits the Manual Calibration Mode without saving any adjustments made.
FIG. 4
Setting The HiVue Visual Indicator
1. Replace cover and secure the (4) captive
screws. Confirm that you have noted the final
position of the valve, (full open or full closed).
VALVE OPEN
VALVE CLOSED
HiVue
Visual Indicator
2. Make sure the HiVue visual display coincides
with the position of the valve (fig.4).
FIG. 5
3. The inner HiVue indicator should show either
Open or Closed. If the position indicated is
the opposite of the actuator position, remove
the (4) truss head screws that secure the
HiVue indicator cover and rotate the indicator
cover 90so the proper symbol for the position
of the valve is displayed. (fig 5).
Truss Head Screw
HiVue Visual Indicator
Cover
HiVue Visual Indicator
4. Secure the visual indicator cover to the housing
cover using the (4) truss head screws.
Housing Cover
Important: Do not exceed 10 in-lb of torque for each screw.
4/28/03
Tech-321/D.W.O14722
Page 6 of 14
�The (IR) Remote Control With The Positioner
The positioner has the ability to be operated (calibrated) via an Infrared (IR) Remote Control. The positioner can be calibrated by using the buttons on the positioner module, however this requires the
removal of the top cover. With the (IR) Remote Control the positioner can be calibrated without the
removal of the top cover. If the 4-20 mA input current connected to the positioner is not available or the
Position Sensor Initial Angle must be set then the removal of the top cover is required. Although the positioner is configured for use with the remote, the (IR) Remote Control is not provided with the positioner.
The (IR) Remote Control is an option and must be purchased separately.
THE IR REMOTE CONTROL BUTTONS
Programing The IR Remote Control
PROGRAMING BUTTON
USED FOR THE INITIAL SETUP OF THE IR REMOTE
BACKLIGHT BUTTON
TURNS THE IR REMOTE BACKLIGHT ON AND OFF
The IR Remote Control is programmed at the
factory and should not need to be programed
again, unless the batteries are removed for an
extended period of time (greater than 10 minutes). To program the IR Remote press the P1
button then press and hold the P button until
the red LED blinks twice, then press 0, 0, 8,
1 after which the red LED on the IR Remote
blinks twice to confirm the entry. Press the P2
button then press and hold the P button until
the red LED blinks twice, then press 0, 0, 5,
4 after which the red LED blinks twice to confirm the entry.
RED LED
LIGHTS WHEN IR SIGNAL IS BEING SENT
D
P1
P2
MODE BUTTONS
ENABLES ONE OF THE TWO MODES, WHICH
REMAINS IN EFFECT UNTIL ANOTHER ONE OF THESE
BUTTONS IS PRESSED. P2 MODE IS THE ONE USED
FOR THE POSITIONER.
HIGH
HIGH CALIBRATE BUTTON
USED TO BEGIN THE HIGH CALIBRATE ROUTINE
GAIN
DROP-OFF LOW
LOW CALIBRATE BUTTON
USED TO BEGIN THE LOW CALIBRATE ROUTINE
NUMERIC BUTTONS
USED TO SELECT THE 3 DIGIT CODE FOR THE
POSITIONER SECURITY ADDRESS
MANUAL
ENTER BUTTON
B
EXIT
UNDO
USED TO ENTER THE 3 DIGIT CODE FOR THE
POSITIONER SECURITY ADDRESS
Using The IR Remote Control
The positioner has two operating modes when using the IR Remote.
In the first mode, the positioner will immediately act upon commands from the IR Remote (this can be
used when the positioner being calibrated is the only one that will be within range of the IR Remote signal, such as one positioner in a closed room). This mode is enabled by setting the positioner DIP switch
position 2 (the one closest to the Low Cal Button) to the ON position (away from the LEDs).
In the second mode, the positioner will not act upon commands from the IR Remote until a 3 digit security code is entered (this can be used when there are multiple positioners within range of the IR Remote
signal). This mode is enabled by setting the positioner DIP switch position 2 (the one closest to the Low
Cal button) to the OFF position (toward the LEDs). Once the correct code is entered (3 digits followed
by the ENTER button) the positioner is enabled to act upon IR Remote commands for 5 minutes. The IR
Command Enable time counts down to zero, or is set to zero (positioner no longer acts upon commands)
when the positioner gets an ENTER from the IR Remote, that was not preceded by the correct 3 digit
security code.
4/28/03
Tech-321/D.W.O14722
Page 7 of 14
�Dip Switches
Dip Switch
#1
CCW
SW1
J2
CW
J3
J1
Dip Switches shown
in factory set positions
Dip Switch
#2
Dip switch #1
Off Position (Factory Setting) = Normal Acting (4 mA represents zero/Fail position and 20 mA represents Span position).
On Position = Reverse Acting (20 mA represents zero/Fail position and 4 mA represents Span position).
Dip switch #2
Off Position = Enables the security code requirement fo IR Remote operation.
On Position (Factory Setting) = Disables the security code requirement (Infrared remote can be used
without security code)
4/28/03
Tech-321/D.W.O14722
Page 8 of 14
�Setting The Positioner Security Code
The security code is initially set by entering a 3 digit code, while the positioner is in the Position Sensor
Initial Angle setup mode. To set a security code enter Position Sensor Initial Angle setup mode, by
pressing and holding the High and Low Calibration buttons on the positioner until the Yellow and Green
LEDs flash. Press the 3 digits for the security code on the IR Remote then press the ENTER button on
the IR Remote (entering the code too quickly may prevent the positioner from reading it correctly, pause
at least 1/2 second between each button pressed and hold each button down for at least 1/2 second on
the IR Remote). When the Low Calibration button on the positioner is pressed to exit the Position Sensor Initial Angle setup mode the 3 digit security code is stored in the EEPROM and will remain there
even if power is removed. Make sure that the security code you assign is different for each of the positioners in the area.
Resetting the EEPROM Back to Factory
Default Values
The positioner has an internal Electrically Erasable Programmable Read Only Memory (EEPROM) that
is used to store the calibration values and the IR Remote security code. These values remain in the
EEPROM memory even if power is removed from the positioner. During normal operation of the positioner the EEPROM will not have to be reset. The memory may become corrupted if power to the positioner is lost while the positioner is writing to the EEPROM. which only happens at the very end of the
calibration cycle or at the end of the Position Sensor Initial Angle setup. This memory can be reset back
to factory default values by holding down the HIgh Cal button while the positioner is being powered up.
After the EEPROM is reset, the positioner will have to be calibrated again and the IR Remote security
code will have to be set again.
Reversing the 4mA and 20mA Positions (Reverse Acting)
Normally 4mA of input current represents the closed valve position and 20mA represents the open valve
position. The positioner has the option to switch this so 20mA represents the closed valve position and
4mA represents the open valve position. The normal mode is chosen by setting the positioner DIP
Switch position 1 (the one closest to the LEDs) to the OFF position (toward the LEDs). The reverse
acting mode is chosen by setting the positioner DIP switch position 1 to the ONposition (away from the
LEDs). The positioner should be calibrated again any time the switch position is changed.
4/28/03
Tech-321/D.W.O14722
Page 9 of 14
�Setting the Switches
1. Operate the actuator to one extreme. Choose the switch you would like to signal this position (upper
or lower switch). Disengage the appropriate switch cam from the spline by pushing or pulling against
the spring (push down for the upper switch, lift up for the lower switch).
2. Turn the cam until the switch is activated. Activation of the switch can be monitored using a continuity tester or equivalent means.
3. Release the cam allowing it to re-engage with the spline.
4. Operate the actuator to the opposite extreme and repeat steps 1 through 3 for the other switch.
TOP CAM
CAM
TOP
PUSH DOWN
DOWN
PUSH
TURN &
& RELEASE
RELEASE
TURN
BOTTOM CAM
LIFT UP
TURN & RELEASE
Wiring Schematic
SWITCH NC
#1
UPPER NO
SWITCH NC
#2
LOWER NO
BROWN
PURPLE
YELLOW
ORANGE
BLUE
RED
1
2
3
4
5
6
GND
4/28/03
Tech-321/D.W.O14722
Page 10 of 14
�Parts List
EaziCal Parts Description
8
7
J1
J3
1
J2
CW
CCW
NORMAL
FAULT
CAL/
SLEW
LOW
CAL
HIGH
CAL
10
Description
Item #
Qty
Housing Assembly
Shaft Assembly
Cover Assembly
ModMount
Manifold Assembly
Electronic Assembly
Connector Board Assembly
Motor Assembly
Mechanical Switch Assembly
10
Output Transmitter
Optional
Mechanical Switch
Assembly
Product Matrix Bracket
EZ
0
Manifold
Air Port Size
N = 1/4 NPT
0 = N/A
Bracket Type
Switch Option
Conduit Size
D = ModMount
0 = Without Switches
1 = (2) SPDT - V3 Mechanical Switches
4 = 3/4 NPT
SPDT switch option is classified for general purpose
* (2)
application only. The EaziCal does not hold any agency
approval when populated with switches.
0 = N/A
Product
Code
4/28/03
Example:
EZ040D0N = EaziCal w/3/4 NPT Conduit, No Switches, Direct Mount Bracket,
1/4 NPT Manifold Air Port Size
Tech-321/D.W.O14722
Page 11 of 14
�Technical Data
Operating Specifications
Input Current
4 to 20 mA (Analog)
Voltage Drop
9 volts
Supply Air Pressure
(low) 15 to 45 psi
(high) ?40 to 120 psi
Resolution
0.5% of span
Linearity
1% of span
Hysteresis
0.4% of span
Repeatability
0.4% of span
Thermal Coefficient
3%/100C
Output Flow Rates
8.0 scfm @ 25 psi
16.2 scfm @ 90 psi
Air Consumption
.30 scfm @ 25 psi
.71 scfm @ 90 psi
Operating Temp. Range
-40C to 85C (-40F to 185F)
Gain
Electrically Adjustable
Air Connection Ports
1/4 NPT
Materials of Construction
Area Classification & Approvals
Housing
Engineered Resin (Nylon)
Cover
Clear Engineered Resin (Nylon)
Shaft
Stainless Steel
Fasteners
Stainless Steel
HiVue
Copolyester
Manifold
Anodized Aluminum
ModMount
Engineered Resin (Nylon)
APPROVED
Electrical Version
SPDT form C
Electrical Rating
15 Amps @ 125/250 VAC
10 Amps @ 24 VDC
0.5 Amps @ 125 VDC
0.25 Amps @ 250 VDC
* Non-Incendive
Class I, Div 2 Grps A,B,C,D
Class II, Div 2 Grps F,G
Class III, Div 2
Enclosure
Conduit
Entries
V3 Mechanical Switches
4/28/03
FM
1 x 3/4 NPT
FM approval as Non-Incendive when ordered with
* Void
2-SPDT switch option (see product matrix page 11).
EaziCal product with optional switches is for use in
general purpose applications only.
Tech-321/D.W.O14722
Page 12 of 14
�Dimensions
EaziCal IR Positioner
W/Tyco Direct Mounting
7.48
(190)
2.32
DIA
(59)
3/4NPT
2.13
(54)
3.66
(93)
2.64
(67)
5.25
(133)
5.95
(151)
3.89
(98.8)
ModMount
(Namur Pattern)
Actuator
4.25
(108)
Side View
.44
(11)
5.12
(130)
.750
(19)
.44
(11)
3.50
(8.9)
Top View
1.73
(44)
1.30
(33)
.375
DIA
(9.5)
.157
(4)
+.000
.157 -.001
( 3.98+.00
-.02 )
Inches
(mm)
FLAT
Standard Namur
Output Shaft
ZR Plus Position Monitor
W/Tyco Direct Mounting
Appendix A
Instructions for EaziCal IR Positioner Mounting Using Standard Namur Output:
1. Remove TYCO direct mounting bracket assembly from the EaziCal IR Positioner.
Note: The EaziCal IR Positioner are equipped with a standard namur output shaft.
2. Replace bracket assembly with a standard namur mounting bracket.
Note: Standard Namur mounting bracket is not included.
4/28/03
Tech-321/D.W.O14722
Page 13 of 14
�Appendix B
Electro-Pneumatic Positioner
Transmitter Calibration Procedure
1. Calibrate the Positioner per the operating manual provided with the product.
2. Stroke the valve to the fully clockwise extreme.
3. Depress the main shaft gear disengaging it from its locking position, take extreme care Not to Turn the main shaft
gear, as this will take the positioner out of calibration.
4. With the main shaft gear depressed turn the transmitter gear to the fully counter clockwise position, and note the
reading (mA) of the transmitter. Next, turn the transmitter gear clockwise until the transmitter changes no more then
0.5 mA from previous reading.
5. Turn the clockwise mA adjustment screw to adjust the transmitter reading to the desired output for this valve position (typically this is 4 mA or 20 mA).
6. Stroke the valve to the fully counter clockwise extreme.
7. Turn the counter clockwise mA adjustment screw to adjust the transmitter reading to the desired output for this
valve position.
8. Stroke the valve between the full clockwise and counter-clockwise positions checking and readjusting the (mA) output as necessary.
Main Shaft
Main Shaft Gear
J2
mA Adjustment Screw
for clockwise position
J3
J1
CW
FAULT
CAL/
SLEW
NORMAL
Transmitter
Output
Terminals 1 & 2
(Not Polarity Dependent)
CCW
LOW
CAL
HIGH
CAL
mA Adjustment
Screw for counterclockwise position
Transmitter Gear
4/28/03
Tech-321/D.W.O14722
Page 14 of 14