Signal Processing for
Mechatronics
DR. TAREK TUTUNJI
PHILADELPHIA UNIVERSITY
2014
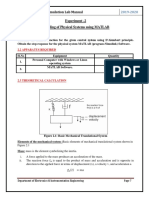
�Mechatronic System Block Diagram
Controller
Signal
Conditioning
Sensors
Tarek A. Tutunji
A/D
(Computer,
Microcontroller,
or DSP)
Physical Process
D/A
Driver
Actuators
�Signal Processing Applications in Mechatronics
Signal Conditioning
Filtering
Noise reduction
Amplification
Data smoothing and correction
Analog-to-Digital conversion
Control
Efficient and fast control algorithms
Parameter estimation
Vibration control
System and parameter identification
Tarek A. Tutunji
�Signal Conditioning
DR. TAREK TUTUNJI
PHILADELPHIA UNIVERSITY
2014
�Signal Conditioning
Signal conditioning circuits improve the quality of signals
generated by transducers before they are converted into
digital signals by the PC's data-acquisition hardware.
Filtering and Amplifying measured signals from sensors
Tarek A. Tutunji
�Signal Conditioning
The signal conditioner accepts
the electrical output of the
transducer and transmits the
signal to the comparator in a form
compatible with the reference
input. The functions of the signal
conditioner include:
Amplification
Isolation
Sampling
Noise elimination
Linearization
Span and reference shifting
Math manipulation
differentiation, division, integration,
multiplication, root finding, squaring,
subtraction, or summation
Signal conversion
DCAC, ACDC, frequencyvoltage,
voltagefrequency, digitalanalog,
analogdigital
Buffering
Digitizing
Filtering
Impedance matching
Wave shaping
Phase shifting
In a digital control system, many of
the signal conditioning functions
listed here can also be
accomplished by software
�Filtering
Electronic filters are circuits which perform signal processing functions,
specifically to eliminate unwanted frequencies and/or enhance wanted ones
�Example: Low Pass Filter
H (s)
Passes low frequencies
Vout
1 / sC
1
Vin 1 / sC R 1 RCs
Blocks high frequencies
�Amplification
Amplification expands the range of the
transducer signals so that they match the input
range of the A/D converter.
For example, a x10 amplifier maps transducer signals
which range from 0 to 1 V into the range 0 to 10 V before
they go into the A/D converter.
�Example: Non-inverting amplifier
-R f
Vout
Vin
Ri
�Voltage Follower
Used to repeat a signal without loading down the
sensor.
�Differential Amplifier
By letting:
Ra = Rb
Rf = Rg
VOUT
Rf
Ra
(Vb Va )
�Instrumentation Amplifier
Amplifier with a very good CMRR.
Common Mode Rejection Ratio (CMRR) is the ratio of amplified
signal to amplified noise
�Op Amps
�Integrator Circuit
Output voltage is proportional to the area under a
signal curve.
�Differentiator Circuit
Output is proportional to the rate of change of the
input.
�Active Low Pass Filter
�Digital Control
DR. TAREK TUTUNJI
PHILADELPHIA UNIVERSITY
2014
�Feedback Control Block Diagram
or DSP
Digital Control Algorithms can be programmed in DSPs
Tarek A. Tutunji
�System Response
The objective of a controller is to
Stabilize the plant
Minimize the steady-state error
Reduce the overshoot, rise time, and settling time during the transient response
�PID Control
Analog
Digital
Tarek A. Tutunji
�Digital PID Realization
Required Operations:
Multiplication
Addition
Delay
�PID Controller Flow Chart
DSPs are used for fast and efficient implementation of control algorithms
Tarek A. Tutunji
�Applications
DR. TAREK TUTUNJI
PHILADELPHIA UNIVERSITY
2014
�Robotic Applications
Multi-axis and multi-
variable linear and
nonlinear controllers
Image processing and
image recognition
Speech processing and
analysis
State estimation and
prediction
Tarek A. Tutunji
�Hard Disc Drives
Position and speed control
Vibration control
Noise filter
Signal transmission and Communication
Tarek A. Tutunji
�Automotive Applications
Combustion Engine Control
Anti-lock Braking System
Speed Control
Airbag
�Military Applications
Fast and accurate
controller response
Efficient maneuvering
Target recognition and
allocation
State estimation
Communication
�Other Applications
Industrial Applications:
Precision tooling machines, smooth operations of
nonlinear electric machines, and HVAC.
Office Equipment:
Position and speed control using AC motor control of
copiers and printers.
�Conclusion
Signal processing techniques in mechatronic systems
are used to:
1.
Filter and amplify the signal received from the
sensor
2. Program fast and efficient algorithms in controllers