100% found this document useful (1 vote)
840 views53 pagesDC Machines and Batteries: EEE 3 Lecture 05
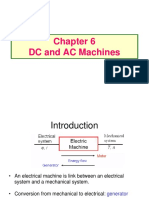
The document discusses DC machines and batteries, outlining their applications and operation. It covers the different types of DC machines including separately excited, self-excited shunt, series, and compound configurations. The objectives are to analyze DC machines and circuits containing them, understand their ratings and relationships between electrical and mechanical quantities.
Uploaded by
No OneCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
100% found this document useful (1 vote)
840 views53 pagesDC Machines and Batteries: EEE 3 Lecture 05
The document discusses DC machines and batteries, outlining their applications and operation. It covers the different types of DC machines including separately excited, self-excited shunt, series, and compound configurations. The objectives are to analyze DC machines and circuits containing them, understand their ratings and relationships between electrical and mechanical quantities.
Uploaded by
No OneCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 53