0% found this document useful (0 votes)
96 views93 pagesOS Part 02 PDF
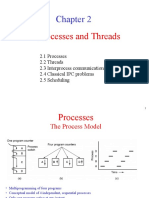
Processes are programs in execution that have their own address space and resources, while threads are lightweight processes that can execute concurrently within a process and share resources; processes and threads communicate and synchronize access to shared resources through interprocess communication and mutual exclusion using techniques like semaphores and monitors to prevent race conditions.
Uploaded by
Nguyen Tuan AnhCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
96 views93 pagesOS Part 02 PDF
Processes are programs in execution that have their own address space and resources, while threads are lightweight processes that can execute concurrently within a process and share resources; processes and threads communicate and synchronize access to shared resources through interprocess communication and mutual exclusion using techniques like semaphores and monitors to prevent race conditions.
Uploaded by
Nguyen Tuan AnhCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 93