0% found this document useful (0 votes)
51 views1 pageDiff
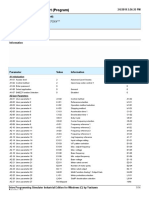
The document lists parameters for a V1000 control system, including over 50 different settings related to control methods, speeds, frequencies, voltages, motor properties, communication settings, protections, and more. The parameters are organized in a table with columns for number, name, setting value, unit, and default setting. Ranges or options are shown for some parameters, and most can be set differently than the default.
Uploaded by
Maria TzagarakiCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
51 views1 pageDiff
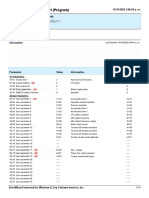
The document lists parameters for a V1000 control system, including over 50 different settings related to control methods, speeds, frequencies, voltages, motor properties, communication settings, protections, and more. The parameters are organized in a table with columns for number, name, setting value, unit, and default setting. Ranges or options are shown for some parameters, and most can be set differently than the default.
Uploaded by
Maria TzagarakiCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 1