0% found this document useful (0 votes)
196 views10 pagesController Design Using Root-Locus Techniques
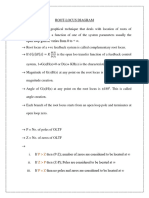
The document describes various controller design techniques using root locus analysis. It discusses P, PD, PI, PID, lead, lag, and lead-lag compensators. For each type of compensator, it provides the design steps which include: identifying the desired closed-loop pole locations based on performance specifications, sketching the open-loop root locus, determining compensator parameters to place the closed-loop poles at the desired locations using pole-zero cancellation and the magnitude condition. It also reviews the conditions for using a second-order approximation and provides formulas for time-domain specifications in terms of the closed-loop pole locations.
Uploaded by
ABDELRHMAN ALICopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
196 views10 pagesController Design Using Root-Locus Techniques
The document describes various controller design techniques using root locus analysis. It discusses P, PD, PI, PID, lead, lag, and lead-lag compensators. For each type of compensator, it provides the design steps which include: identifying the desired closed-loop pole locations based on performance specifications, sketching the open-loop root locus, determining compensator parameters to place the closed-loop poles at the desired locations using pole-zero cancellation and the magnitude condition. It also reviews the conditions for using a second-order approximation and provides formulas for time-domain specifications in terms of the closed-loop pole locations.
Uploaded by
ABDELRHMAN ALICopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 10