0% found this document useful (0 votes)
65 views27 pagesSignals and Systems: Instructor: Sohaib Abdul Rehman
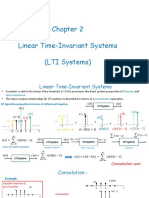
This document summarizes key properties of linear time-invariant (LTI) systems, as determined from their impulse responses:
1) Memory, invertibility, causality, and stability properties can be determined from the impulse response.
2) A system is stable if the impulse response is absolutely integrable, meaning the integral of the absolute value of the impulse response is finite.
3) The unit step response of an LTI system is the integral of the impulse response from minus infinity to time t.
Uploaded by
Hamza ShahidCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
65 views27 pagesSignals and Systems: Instructor: Sohaib Abdul Rehman
This document summarizes key properties of linear time-invariant (LTI) systems, as determined from their impulse responses:
1) Memory, invertibility, causality, and stability properties can be determined from the impulse response.
2) A system is stable if the impulse response is absolutely integrable, meaning the integral of the absolute value of the impulse response is finite.
3) The unit step response of an LTI system is the integral of the impulse response from minus infinity to time t.
Uploaded by
Hamza ShahidCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 27