0% found this document useful (0 votes)
145 views52 pagesCh05 - Shape Functions
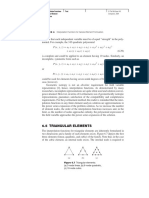
This document summarizes different types of finite elements used in structural analysis. It discusses 1D, 2D, and 3D elements such as spring, bar, beam, triangular, and tetrahedral elements. It also describes shape functions and interpolation functions that relate displacements at nodes to displacements within the element. Derivations of shape functions are shown for various elements, including linear and quadratic shape functions for plane elements and cubic shape functions for beam elements that satisfy displacement and rotation continuity requirements.
Uploaded by
Jeff ImamCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
145 views52 pagesCh05 - Shape Functions
This document summarizes different types of finite elements used in structural analysis. It discusses 1D, 2D, and 3D elements such as spring, bar, beam, triangular, and tetrahedral elements. It also describes shape functions and interpolation functions that relate displacements at nodes to displacements within the element. Derivations of shape functions are shown for various elements, including linear and quadratic shape functions for plane elements and cubic shape functions for beam elements that satisfy displacement and rotation continuity requirements.
Uploaded by
Jeff ImamCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 52