0% found this document useful (0 votes)
32 views38 pagesOperating Systems
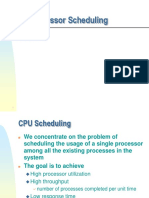
The document discusses various scheduling algorithms and concepts used in operating systems including multilevel queue scheduling, multiprocessor scheduling, real-time scheduling, and an overview of Linux scheduling. It covers topics like priority, time slicing, dynamic priority adjustment, and runqueues.
Uploaded by
xpershanCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
32 views38 pagesOperating Systems
The document discusses various scheduling algorithms and concepts used in operating systems including multilevel queue scheduling, multiprocessor scheduling, real-time scheduling, and an overview of Linux scheduling. It covers topics like priority, time slicing, dynamic priority adjustment, and runqueues.
Uploaded by
xpershanCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 38