Code No: R2022044 R20 SET - 1
II B. Tech II Semester Regular/Supplementary Examinations, July - 2023
LINEAR CONTROL SYSTEMS
(Common to ECE & EIE)
Time: 3 hours Max. Marks: 70
Answer any FIVE Questions each Question from each unit
All Questions carry Equal Marks
~~~~~~~~~~~~~~~~~~~~~~~~~
UNIT-I
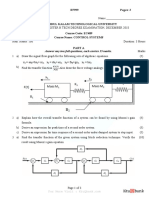
1. a) Determine the transfer function V(s)/F(s), for the system show in below figure: [7M]
b) Compare open loop and closed loop control systems based on different aspects. [7M]
(OR)
2. a) Determine the differential equation for the given mechanical system as shown [7M]
in figure and derive its transfer function and also draw the electrical equivalent
analogous system.
b) Explain the necessity and effect of feedback in control systems. [7M]
UNIT-II
3. a) Derive the transfer function of Synchronous transmitter. [7M]
b) A unity feedback servo-driven instrument has an open loop transfer function: [7M]
G(s)=10/s(s+2). Find the time domain specification for a unit step input.
(OR)
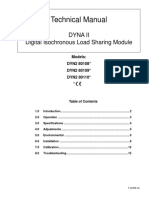
4. a) Compute the transfer function for control function shown below figure using [9M]
Mason’s gain formula:
1 of 2
|''|'||||''|'''|||'|
�Code No: R2022044 R20 SET - 1
b) Using Block diagram reduction technique find the Transfer Function of the [5M]
system.
UNIT-III
5. a) Explain how Routh Hurwitz criterion can be used to determine the absolute [7M]
stability of a system.
b) With the help of Routh’s stability criterion find the stability of the following [7M]
system represented by the characteristic equation: s 4 + 8 s 3 + 18 s 2 + 16s + 5
= 0.
(OR)
6. a) Enlist qualitative stability & conditional stability. [7M]
b) Calculate the angle of asymptotes and the centroid for the system having: [7M]
UNIT-IV
7. a) Derive the expressions for resonant peak and resonant frequency and hence [7M]
establish the correlation between time response and frequency response.
b) Sketch the Bode plot for the following Transfer Function : [7M]
G(s) H(s) = From the bode plot determine
(i) Gain Margin (ii) Phase Margin (iii) Comment on the stability
(OR)
8. a) Sketch the polar plots of typical Type 0, 1 and 2 systems and explain the salient [7M]
features of these plots.
b) Explain about gain crossover frequency and phase cross over frequency. [7M]
UNIT-V
9. a) Explain the design of Lead-Lag controller. [9M]
b) Write the effect and limitation of phase-lag controller. [5M]
(OR)
10. a) Transfer function of a system is given by: [7M]
find controllability and observability.
b) Check whether given system is Observable or controllable, [7M]
2 of 2
|''|'||||''|'''|||'|
� : No: R2022044
Code R20 SET - 2
II B. Tech II Semester Regular/Supplementary Examinations, July - 2023
LINEAR CONTROL SYSTEMS
(Common to ECE & EIE)
Time: 3 hours Max. Marks: 70
Answer any FIVE Questions each Question from each unit
All Questions carry Equal Marks
~~~~~~~~~~~~~~~~~~~~~~~~~
UNIT-I
1. a) V2 ( S ) [7M]
Determine the transfer function F ( S ) ,for the system show in below figure:
b) Describe the effect of feedback on system stability and sensitively. [7M]
(OR)
2. a) Determine the transfer function v3(s)/F(s), for the system shown in below [7M]
figure:
b) How the control systems are classified? What are its various types. [7M]
UNIT-II
3. a) Derive the transfer function and develop the block diagram of armature [5M]
controlled DC servo motor.
b) Derive the expression for response of Undamped second ordered system for [10M
unit step input. ]
(OR)
4. a) For the system represented in the given figure, determine transfer function [7M]
C(S)/R(S).
|''|'||||''|'''|||'| 1 of 2
�Code No: R2022044 R20 SET - 2
b) Find the overall transfer function of the system whose signal flow graph is [7M]
shown below.
UNIT-III
5. a) A system has : [7M]
Where K is positive. Determine the range of K for stability.
b) With the help of Routh’s stability criterion find the stability of the following [7M]
system represented by the characteristic equation:
s 6 + 2s5 + 8s4 + 12s3 + 20s2 + 16s + 16 = 0.
(OR)
6. a) Sketch the root locus for the characteristic equation is [7M]
S(S+1) (S+2)+K(S+1)-5=0.
b) Sketch the root locus of the system whose open loop transfer function is G(s) [7M]
H(s) = ࡷ (ࡿ+ૢ) / ࡿ(ࡿ+ࡿ+).
UNIT-IV
7. a) Draw the magnitude bode plot for the system having the following transfer [7M]
function:
b) Given ξ = 0.7 and ωn = 10 rad/sec. Calculate resonant peak, resonant frequency [7M]
and bandwidth.
(OR)
8. a) Sketch the polar plot for the open loop transfer function of a unity feedback [7M]
system is given by :
Determine Gain Margin & Phase Margin.
b) Draw the Nyquist plot for the system whose open loop transfer function is, [7M]
G(s)H(s) = ࡷ / ࡿ(ࡿ+) (ࡿ+) . Determine the range of K for which closed
loop system is stable.
UNIT-V
9. a) Determine the state controllability and observability of the system described [7M]
by:
b) Enumerate the design steps involved in phase lag-lead compensation. [7M]
(OR)
10. a) Define State, State variable, State model & State diagram. [7M]
b) Obtain the state model of the system whose transfer function is given by: [7M]
.
2 of 2
|''|'||||''|'''|||'|
�Code No: R2022044 R20 SET - 3
II B. Tech II Semester Regular/Supplementary Examinations, July - 2023
LINEAR CONTROL SYSTEMS
(Common to ECE & EIE)
Time: 3 hours Max. Marks: 70
Answer any FIVE Questions each Question from each unit
All Questions carry Equal Marks
~~~~~~~~~~~~~~~~~~~~~~~~~
UNIT-I
1. a) For the mechanical system shown in Fig, determine the transfer [7M]
functions܆()ܛ/۴(܆ & )ܛ()ܛ/۴()ܛ
b) Define control system. Write the different types with numerical control [7M]
systems with example.
(OR)
2. a) Obtain the mathematical model of the mechanical system shown in below [7M]
Figure:
b) Derive the transfer function of Translational mechanical system. [7M]
UNIT-II
3. a) For the system represented in the given figure, determine transfer function [7M]
C(S)/R(S).
b) Explain DC Servomotor and obtain its transfer function. [7M]
(OR)
1 of 2
|''|'||||''|'''|||'|
�Code No: R2022044 R20 SET - 3
4. a) Find all the time domain specifications for a unity feedback control system [7M]
whose open loop transfer function is given by G(S) = / ࡿ(ࡿ+) .
b) Find the overall transfer function of the system whose signal flow graph is [7M]
shown below.
UNIT-III
5. a) With the help of Routh’s stability criterion find the stability of the following [9M]
system represented by the characteristic equation:
s 5 + s 4 + 2 s 3 + 2 s 2 + 3s + 5 = 0
b) List the limitations of Routh’s stability. [5M]
(OR)
6. a) Using RH to determine the location of roots on the S-Plane and hence the [7M]
stability for the system represented by the characteristic equation
b) Sketch the root locus of the system whose open loop transfer function is G(s) [7M]
H(s) = ۹ / ࡿ (ࡿ+ࡿ+).
UNIT-IV
7. a) Sketch the Bode plot for the system having the following transfer [7M]
function:
b) Sketch the polar plot of the transfer function: [7M]
(OR)
8. a) Describe the Nyquist stability criterion and its significance. [7M]
b) Build the Nyquist plot for a given transfer function: [7M]
UNIT-V
9. a) Derive the expression for the transfer function of a lead-lag compensator. [7M]
b) Define state transition matrix and explain its properties with examples. [7M]
(OR)
10. The state equations of a Linear system are as follows. [14M
]
Determine the transfer function y(s)/u(s).
2 of 2
|''|'||||''|'''|||'|
� : No: R2022044
Code R20 SET - 4
II B. Tech II Semester Regular/Supplementary Examinations, July - 2023
LINEAR CONTROL SYSTEMS
(Common to ECE & EIE)
Time: 3 hours Max. Marks: 70
Answer any FIVE Questions each Question from each unit
All Questions carry Equal Marks
~~~~~~~~~~~~~~~~~~~~~~~~~
UNIT-I
1. a) Write the differential equations governing the mechanical rotational system [7M]
shown in the figure and find transfer function.
b) Explain about Traffic light control systems. [7M]
(OR)
2. a) Find the transfer function X(s)/F(s) of the system Figure given below: [7M]
b) Derive the transfer function of rotational mechanical system. [7M]
UNIT-II
3. a) Determine the closed loop transfer function of control system shown below [7M]
figure:
b) Find the overall transfer function of the system whose signal flow graph is [7M]
shown below.
(OR)
1 of 2
|''|'||||''|'''|||'|
�Code No: R2022044 R20 SET - 4
4. a) Describe the AC servo motor and list out its merits and demerits. [7M]
b) List out the time domain specifications and derive the expressions for Rise [7M]
time, Peak time and Peak overshoot.
UNIT-III
5. a) Determine the range of K for stability of unity feedback system whose open [7M]
loop transfer function is G(s) H(s)= = ۹ / ࡿ(ࡿ + ) (ࡿ+). Using Routh’s
stability criterion.
b) With the help of Routh’s stability criterion find the stability of the following [7M]
system represented by the characteristic equation:
9s 5 -20s 4 + 10 s 3 - s 2 - 9s - 10 = 0
(OR)
6. a) Explain the procedure for constructing root locus. [7M]
b) Sketch the root locus of the system whose open loop transfer function is G(s) [7M]
H(s) = ۹ / ࡿ(ࡿ + )(ࡿ+)
UNIT-IV
7. a) Sketch the Bode plot for the following transfer function G(s)H(s) = [7M]
b) Sketch the polar plot for : [7M]
(OR)
8. a) Explain frequency domain specifications. [7M]
b) A system is given by G(s) H(s) = (ࡿ+) / ࡿ(ࡿ+) (ࡿ+) Sketch the Nyquist [7M]
plot and determine the stability of the system.
UNIT-V
9. a) Explain PID Controllers with necessary expressions. [7M]
b) Explain the controllability and observability with an example. [7M]
(OR)
10. The state equation of a system is given by: [14M]
i) Is the system controllable
ii) Compute the state transition matrix
iii) Compute x1(t) under zero initial condition and a unit step input.
2 of 2
|''|'||||''|'''|||'|