0 ratings0% found this document useful (0 votes) 46 views6 pagesControl III 5.1
Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content,
claim it here.
Available Formats
Download as PDF or read online on Scribd
INTROL ENGINEERING III 2022/2023 06/07/202:
‘TIME: 1 HOUR
1) Deduce the expressions for the following vectors of a multi-input multi-output
dynamic system: i) State vector, ii) Input vector, ii) Output vector
(6 Marks)
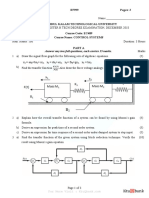
b) Consider the mechanical system below. Obtain the state equations.
(5 Marks)
) A system has a transfer function
The system has an initial condition y(0) = 1 and is subject to zero input u(e) = 0.
Determine: i) the state and output equations; ii) the transition matrix (s); iii) the
time response of state variables.
(9 Marks)
4) Differentiate between a state controller and a state observer. What are the necessary
and sufficient conditions for state controller and state observer, respectively, to be
effective ih pole placement design?
(4 Marks)
©) Design a stator estimator with eigenvalues of -10 and -10 for the following LTI
system
U 0 4 0
gaan? x0=(2, S)xo+[uo
yO=(1 o]xtt)
(6 Marks)�W1-2-60-1-6
‘CHNOLOGY
TY OF AGRICULTURE AND.
ITY EXAMINATION 2022/2023
JOMO KENYATTA UNIV!
UNIVE
FIFTH YEAR FIRST SEMESTER MAIN EXAMINATION FOR TH
BACHELOR OF SCIENCE IN ‘TRICAL AND ELECT!
(EEE) & ELECTRONIC AND COMPUTER ENGINEERING (ECE).
RING UL
EEE 2502: CONTROL ENGINE!
DATE: AUGUST 2023 TIME: 2 HOURS
INSTRUCTIONS
1. This paper consists of FIVE questions.
2. Answer QUESTION ONE and ANY OTHER TWO questions.
3. All workings must be clearly shown.
4, Do not write on the question paper.
QUESTION ONE (30 MARKS) (OMPULSORY
a) Deduce the expressions for the following vectors of a multi-input multi-output
dynamic system
i) State vector
ii) Input vector
iii) | Output vector
(6 Marks)
b) Using the vector matrices above, deduce the state and output equations for the
following systems:
i) Time varying
ii) Time-invariant
(2 Marks)
c) Derive the state-space representation for the following network
Page 1 ofS�vit) valt)
Given
i) State variables are V,(t) and S422
ii) State variables are V(t) and i(t)
(10 Marks)
d) Using the power series method of Z-transform inversion, find the value of {e(k)} for
E(2) given by
2@) = aaa
(6 Marks)
©) Using the principles of similarity transformations, deduce the expression for the state
equation given that
[3 2 0
10=[ Jxo+f]uco
yOQ=[1 O)x(e)
' aa ft v
with the transform, P-* = [1 3]
(6 Marks)
QUESTION TWO (20 MARKS)
a) Using the generalized state equations of a lin
following terms in control engineering:
i) Controllability
ii) Observability
ear time invariant system, define the
(8 Marks)
b) State whether the following system is controllable
Page 2 of $�(7 Marks)
©) Express the following equation as a transfer function in Laplace transform
in) di
ye Pay) tnt ay Dt any = Baul + by UD bya FE yt
where w is the input and y is the output. State any assumption made.
(5 Marks)
QUESTION THREE (20 MARKS)
a) For the mass-spring-damper system shown in Figure 3a, m is the mass, k is the spring
constant, b is the friction constant, w(t) is the external applied force, and y(t) is the
resulting displacement. Given m = 1 kg, b = 3N.s.m-3, k = 2N.m™4 andu = 0,
evaluate:
k — yb
m +> u(t)
Figure 3a
i) State equation, characteristic equation, roots of characteristic equation,
damping ratio, and natural frequency.
ii) Transition matrices (s) and (¢)
iii) Transition response of state variables for y(0) = 1 and (0) = 0
(14 Marks)
Page 3 of 5�: fa system whose system
b) Determine the transformation matrix required to transform a system y
ence, express the system matrix
matrix is given below into diagonal canonical form. Hence, express the sy
in diagonal form.
1
3 Hi
(6 Marks)
QUESTION FOUR (20 MARKS!
9). The state and output equations for a DC motor model are given as
4 fig) _[-100 -5 fig] , [100
als}=Cs° Soll] + Poel
o=to [|
For the closed-loop response of the motor to achieve a response time of 20 ms, it is
desired that the closed loop poles are at ~50,—100. Determine the feedback gains to
achieve the desired response. Outline the resulting control law and the closed loop
system matrix,
(8 Marks)
b) Using a block diagram, explain how a full state observer works and state the closed
loop characteristic equation.
(6 Marks)
©) State whether the characteristic polynomial of a discrete time system given by the
following equation is of a stable system. Use Routh-Hurwitz criterion.
Q(z) = 23 - 227 +152-0.4
(6 Marks)
QUESTION FIVE (20 MARKS)
a) With aid of mapping from s-plane to z-plane to w-plane, explain the principles of
“Bilinear transformation”
(8 Marks)
b) Find the z-transfer function of forward transfer function given in the Laplace transform
as
Page 4 of 5�Gu(s)G(s) = FS eral
where G(s) is the zero-order hold transfer function and T= 0,1 seconds,
(6 Marks)
¢) Determine the z-transform for the function whose Laplace transform is
a-b
8) = Graet by
(6 Marks)
END
Page Sof S