0% found this document useful (0 votes)
38 views38 pagesSynthesis Constraints
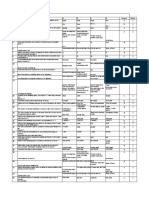
The document outlines synthesis constraints and logic cell selection, emphasizing the importance of timing analysis for circuit design. It details the significance of defining constraints such as maximum area, power, and timing paths to ensure designs meet operational requirements. Additionally, it discusses the modeling of clock parameters, including latency, uncertainty, and transition time, to optimize circuit performance.
Uploaded by
behenkalaudahaituCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
38 views38 pagesSynthesis Constraints
The document outlines synthesis constraints and logic cell selection, emphasizing the importance of timing analysis for circuit design. It details the significance of defining constraints such as maximum area, power, and timing paths to ensure designs meet operational requirements. Additionally, it discusses the modeling of clock parameters, including latency, uncertainty, and transition time, to optimize circuit performance.
Uploaded by
behenkalaudahaituCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 38