0% found this document useful (0 votes)
36 views49 pagesMicroprocessor
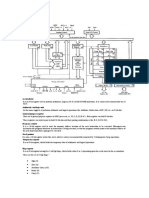
The document provides a detailed overview of the pin configuration and functionality of the 8085 microprocessor, which is an 8-bit microprocessor with a 16-bit address bus capable of addressing 64 KB of memory. It categorizes the 40 pins into seven groups, including power supply, data and address buses, serial I/O ports, control signals, interrupts, and direct memory access. Additionally, it discusses the timing diagrams for various machine cycles and the limitations of the 8085 architecture.
Uploaded by
Tanmoy DattaCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
36 views49 pagesMicroprocessor
The document provides a detailed overview of the pin configuration and functionality of the 8085 microprocessor, which is an 8-bit microprocessor with a 16-bit address bus capable of addressing 64 KB of memory. It categorizes the 40 pins into seven groups, including power supply, data and address buses, serial I/O ports, control signals, interrupts, and direct memory access. Additionally, it discusses the timing diagrams for various machine cycles and the limitations of the 8085 architecture.
Uploaded by
Tanmoy DattaCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 49