0% found this document useful (1 vote)
419 views7 pagesRotor Reference Frame Model
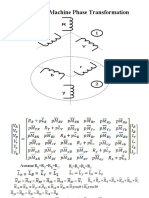
The document discusses dynamic modeling of induction machines using an arbitrary reference frame model. It describes how reference frames allow unique views of electrical systems and how the induction motor model can be represented in an arbitrary reference frame rotating at any speed. It then discusses specific cases of the stator reference frame where the frame rotates at zero speed, the rotor reference frame where it rotates at the rotor speed, and the synchronously rotating reference frame. The rotor reference frame model is derived from the arbitrary reference frame model by setting the frame speed equal to the rotor speed. The electromagnetic torque equation is also provided in the rotor reference frame.
Uploaded by
Stephen DavidsamuelCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPTX, PDF, TXT or read online on Scribd
0% found this document useful (1 vote)
419 views7 pagesRotor Reference Frame Model
The document discusses dynamic modeling of induction machines using an arbitrary reference frame model. It describes how reference frames allow unique views of electrical systems and how the induction motor model can be represented in an arbitrary reference frame rotating at any speed. It then discusses specific cases of the stator reference frame where the frame rotates at zero speed, the rotor reference frame where it rotates at the rotor speed, and the synchronously rotating reference frame. The rotor reference frame model is derived from the arbitrary reference frame model by setting the frame speed equal to the rotor speed. The electromagnetic torque equation is also provided in the rotor reference frame.
Uploaded by
Stephen DavidsamuelCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPTX, PDF, TXT or read online on Scribd
/ 7