


![HIGH LEVEL LANGUAGE These languages are either designed specially for the purpose, or versions of general purpose languages such as the C programming language. A compiler , analogous to an assembler, is used to translate high-level language statements into machine code; or an interpreter executes statements directly. Interprete r firmware is also available for some microcontrollers. For example, BASIC on the early microcontrollers Intel 8052 [3] and Zilog Z8 as well as some modern devices. Typically these interpreters support interactive programming.](https://image.slidesharecdn.com/embeddedsystem-1229406108281735-1/85/Embedded-system-36-320.jpg)




![HIGH LEVEL LANGUAGE These languages are either designed specially for the purpose, or versions of general purpose languages such as the C programming language. A compiler , analogous to an assembler, is used to translate high-level language statements into machine code; or an interpreter executes statements directly. Interprete r firmware is also available for some microcontrollers. For example, BASIC on the early microcontrollers Intel 8052 [3] and Zilog Z8 as well as some modern devices. Typically these interpreters support interactive programming.](https://image.slidesharecdn.com/embeddedsystem-1229406108281735-1/75/Embedded-system-36-2048.jpg)

The document provides an overview of microcontrollers and embedded systems. It defines an embedded system and describes their characteristics such as real-time operation, small size, low power usage, and operation in harsh environments. It discusses the hardware components of typical embedded systems including microcontrollers. It then focuses on the 8051 microcontroller, describing its architecture and pin layout.
Presentation introduces embedded systems, their characteristics, types, and applications.
Defining embedded systems, discussing their task-specific nature, real-time operation, and interaction with environments.
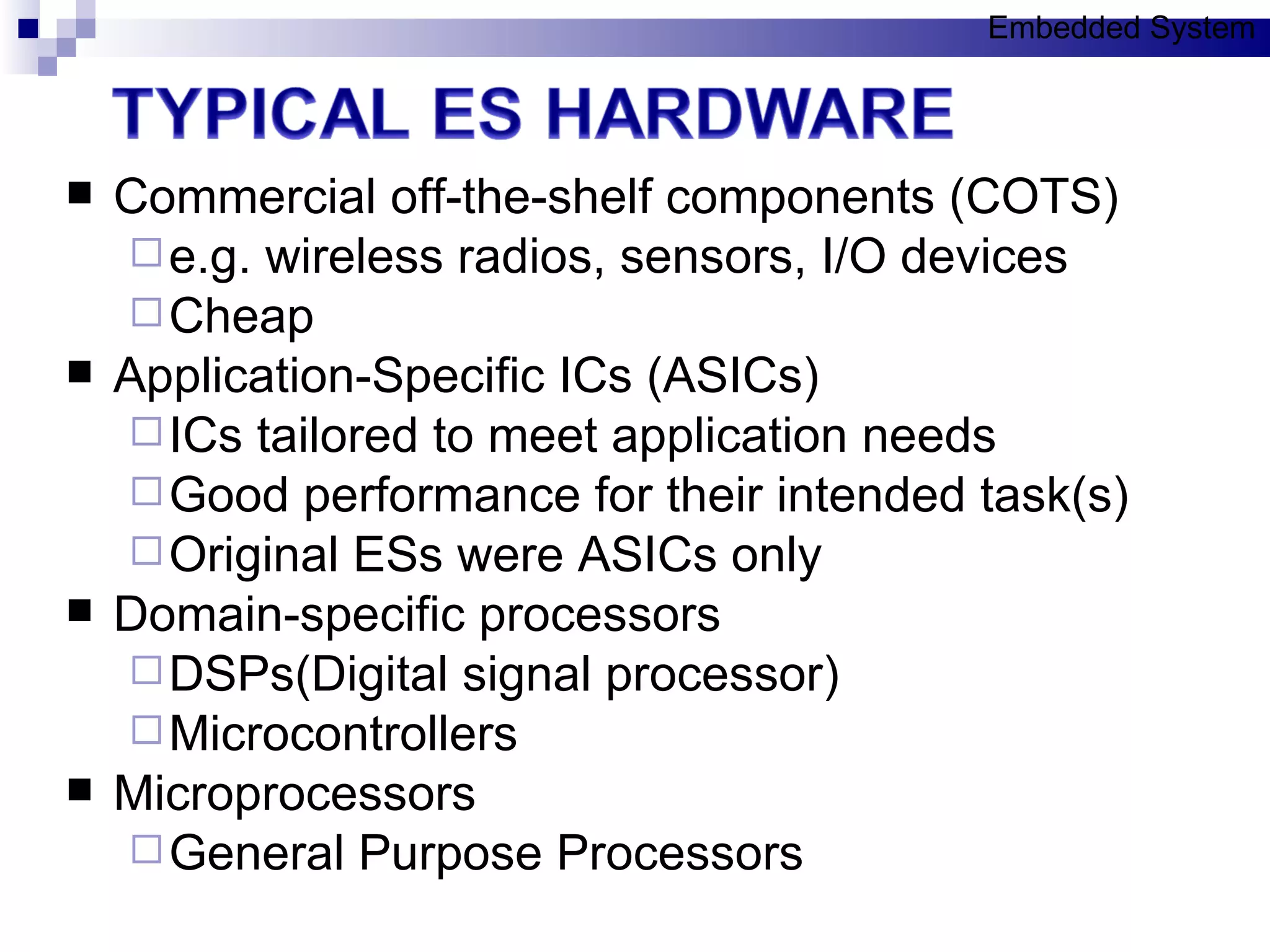
Exploring the real-time operation of embedded systems, hardware components, and software (firmware) constraints.
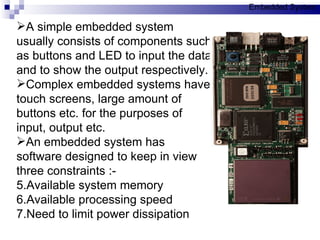
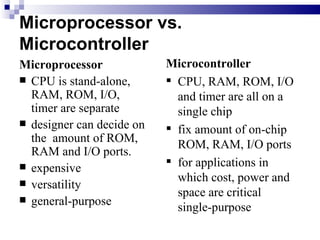
Describing simple and complex embedded systems, comparing microcontrollers with microprocessors.
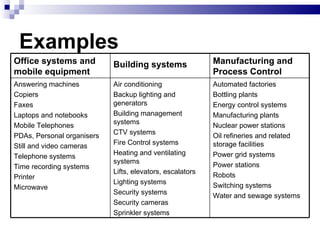
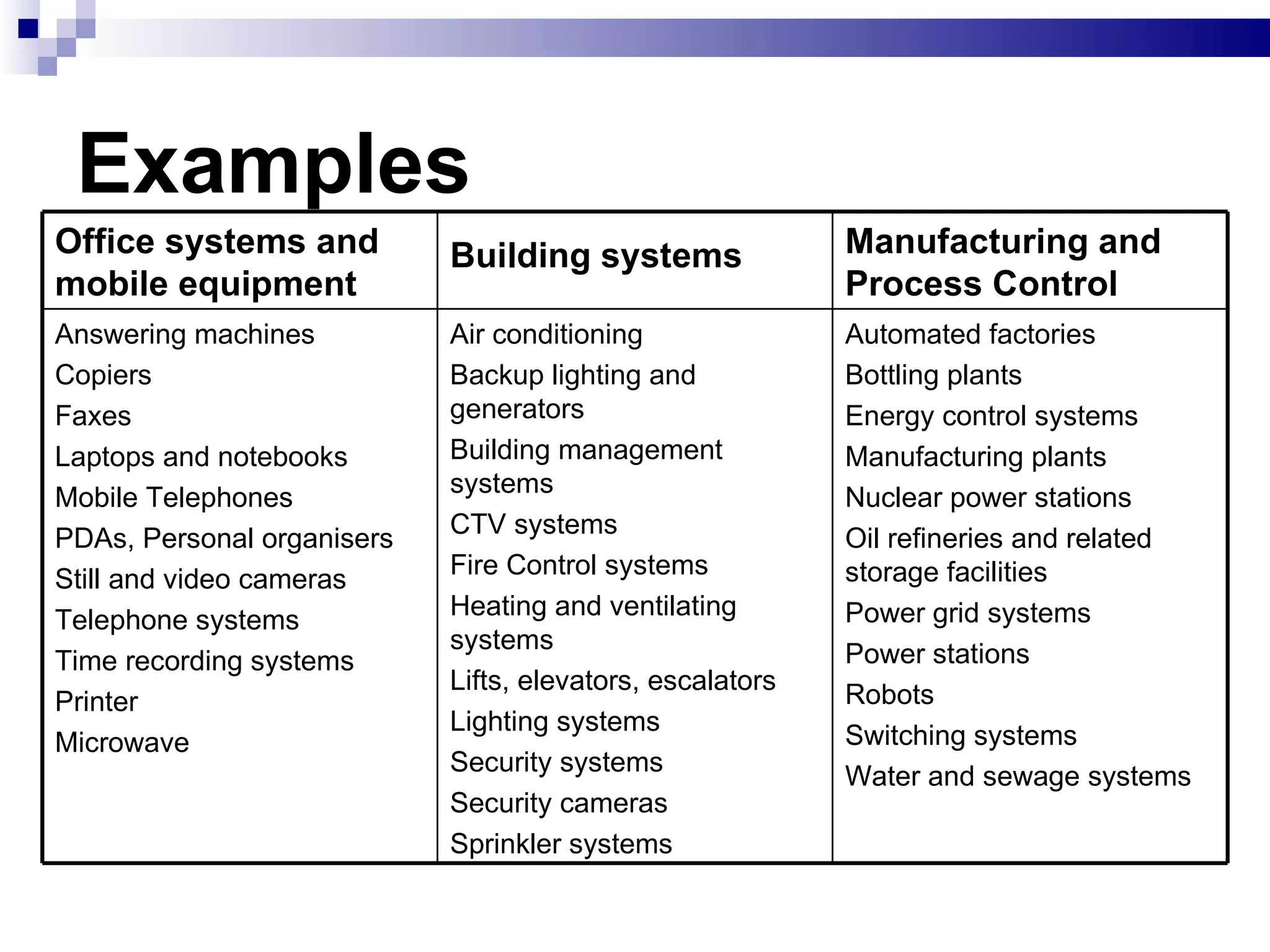
Listing various applications of embedded systems across numerous industries including healthcare, transportation, and home appliances.
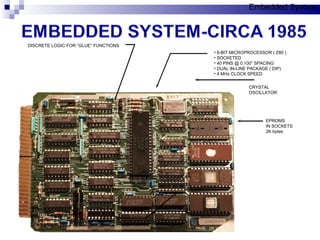
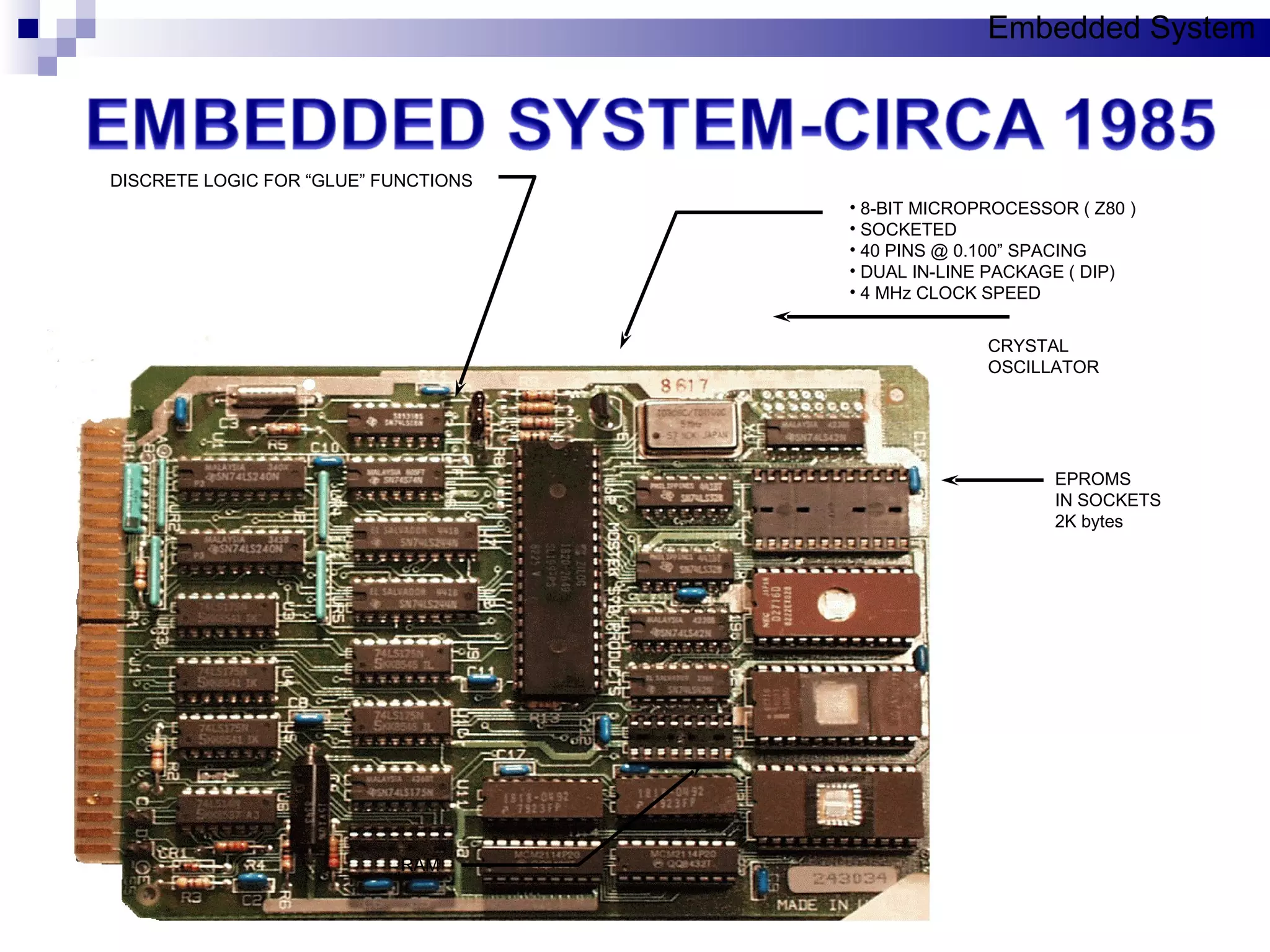
Details on embedded components like EPROMs, microprocessors, and their application-specific designs.
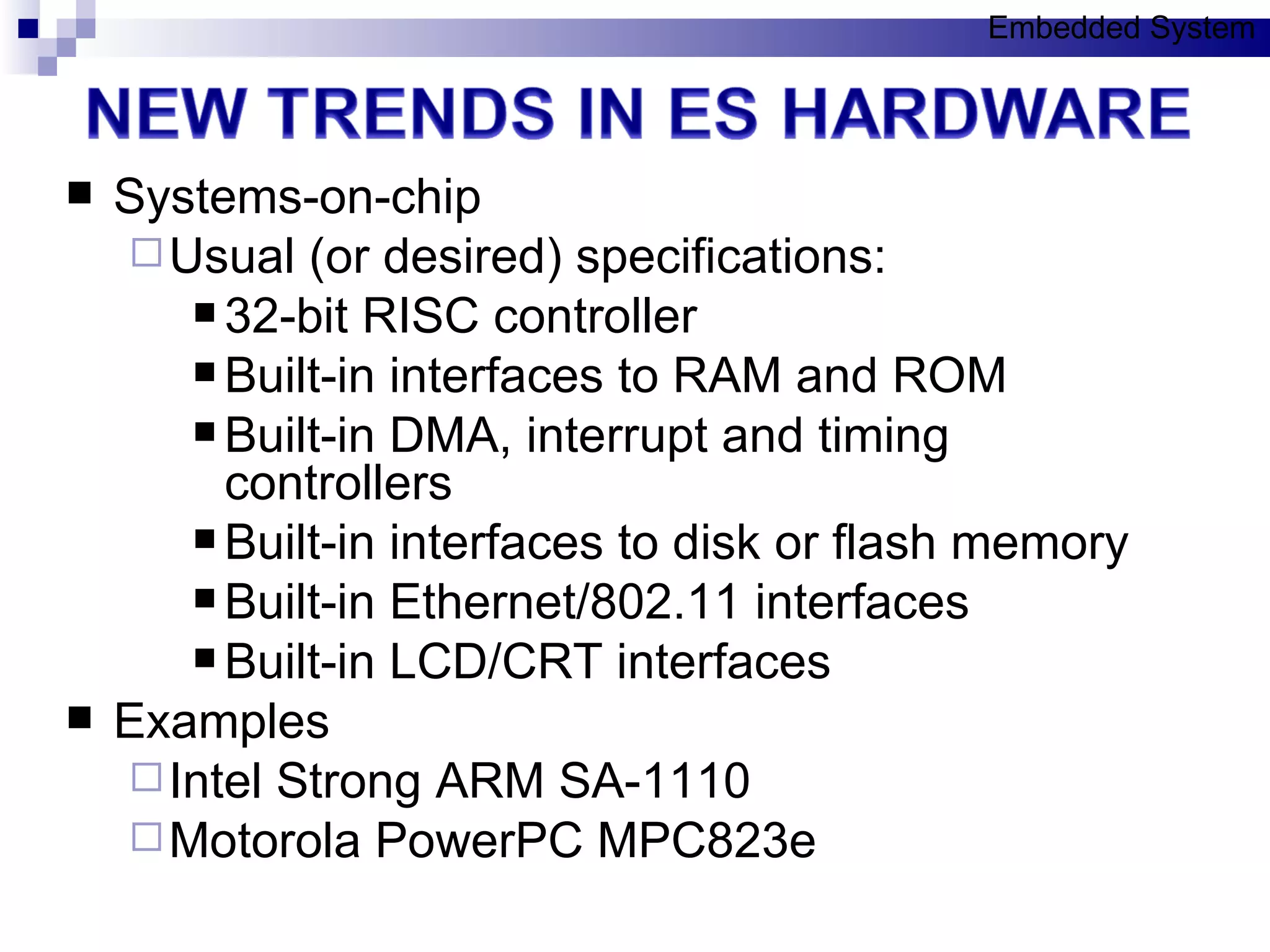
Discussing systems-on-chip specifications, embedded operating systems, specifically Embedded Linux advantages.
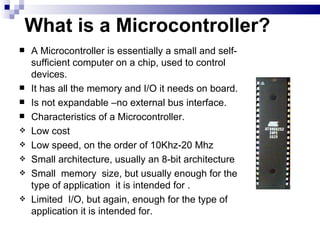
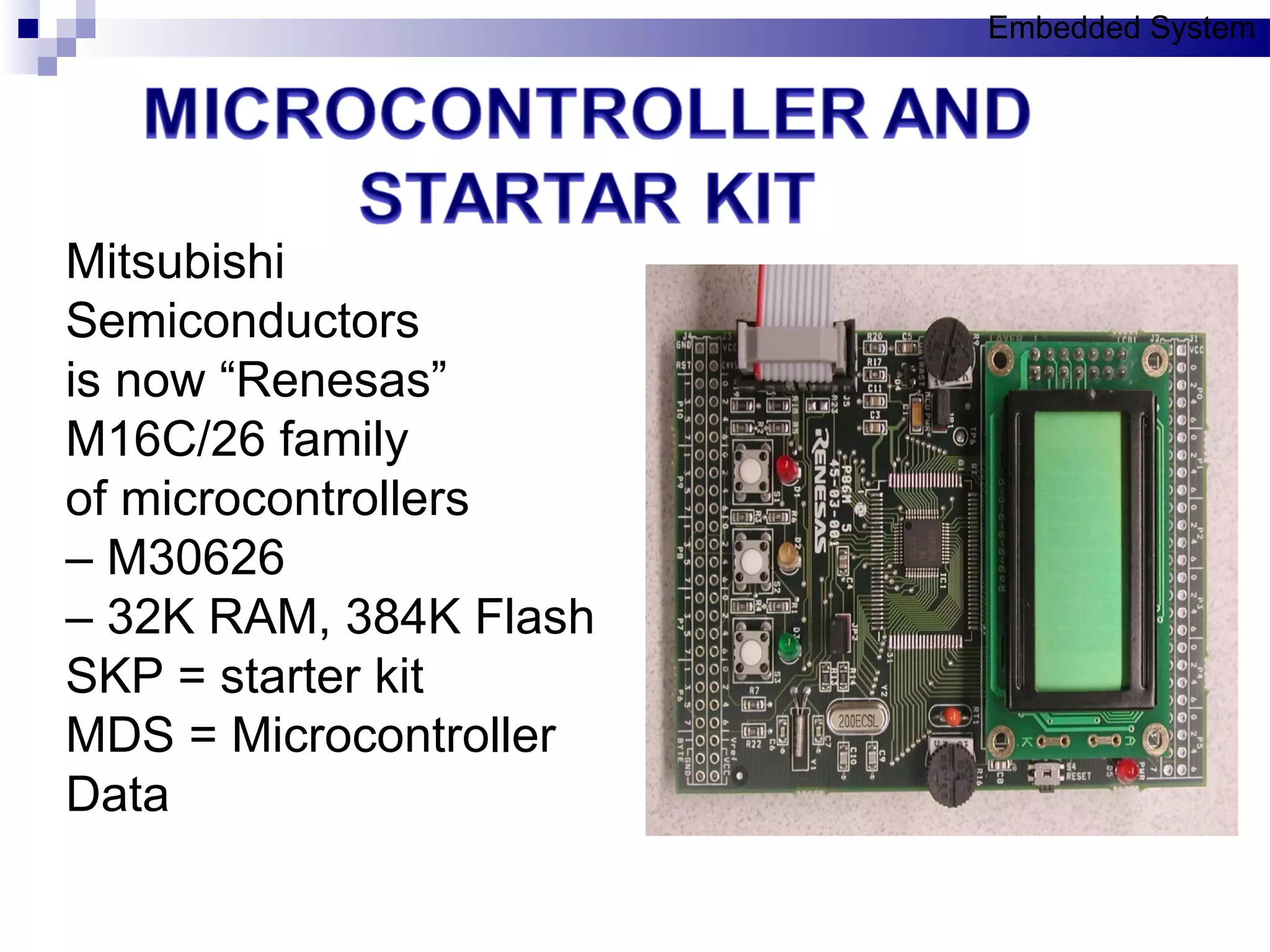
Defining microcontrollers, discussing their features, examples, and architectures including traditional microcontroller families.
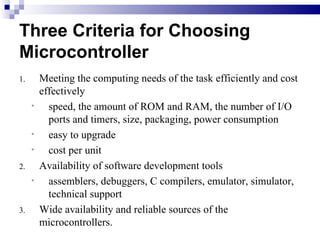
Key criteria for selecting microcontrollers based on efficiency, cost, upgrades, and availability of tools.
Comparative analysis between microprocessors and microcontrollers focusing on design, cost, and functionality.
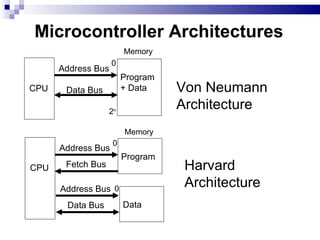
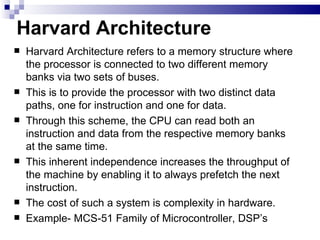
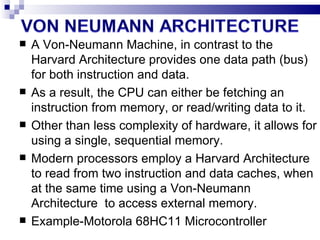
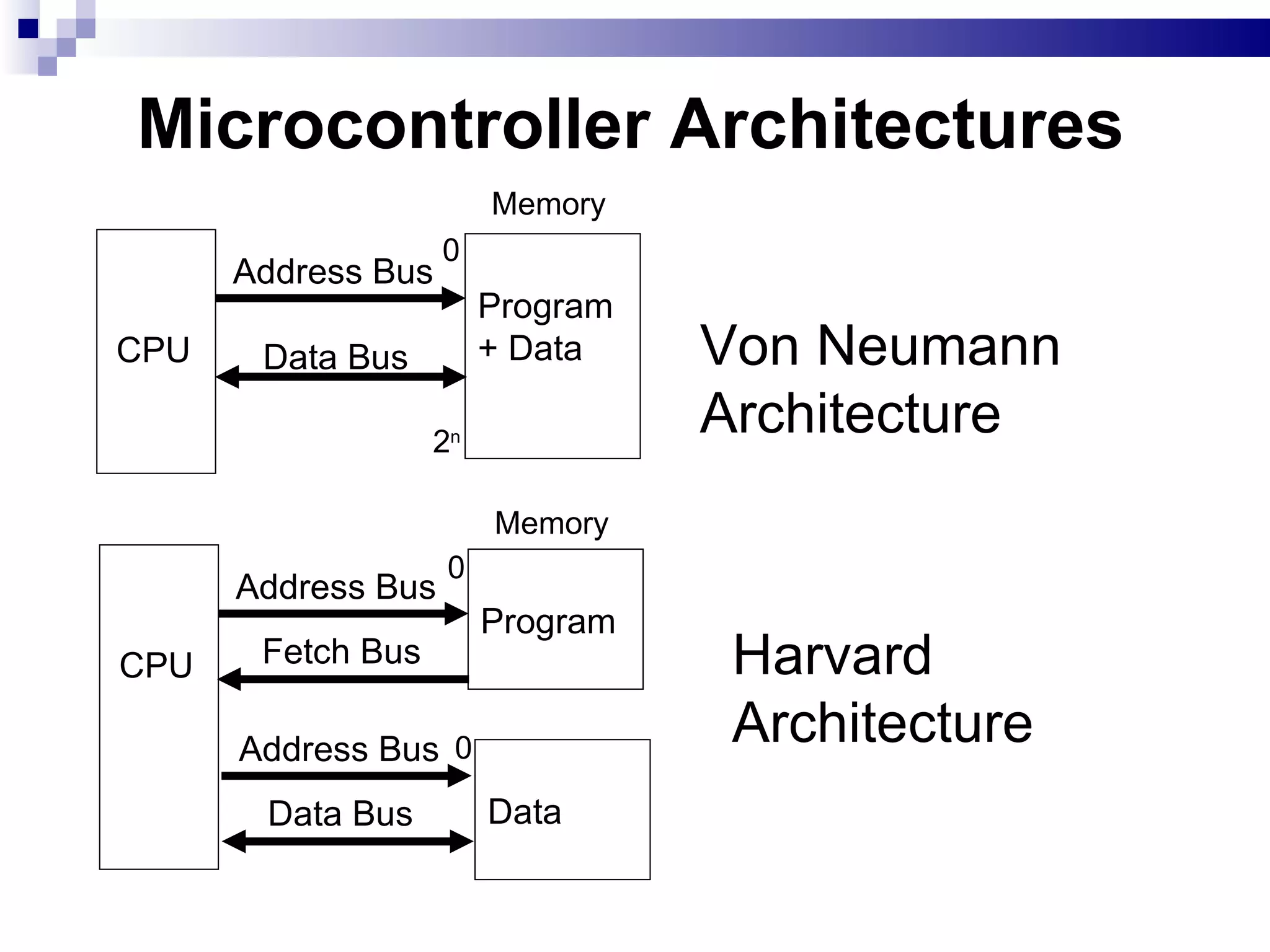
Explaining Harvard and Von Neumann architectures, their differences, and practical examples.
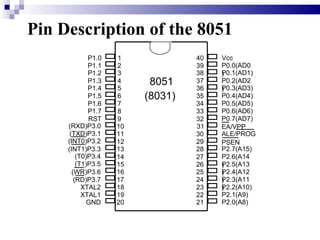
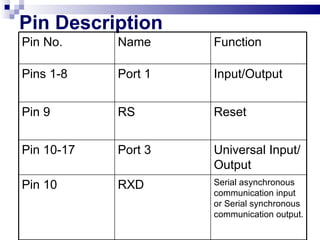
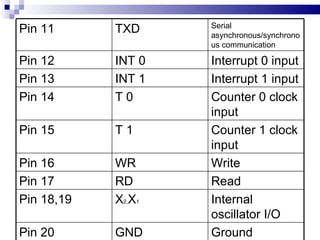
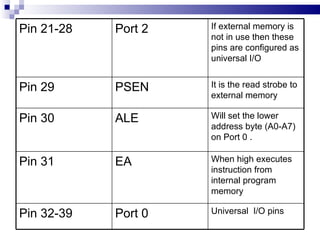
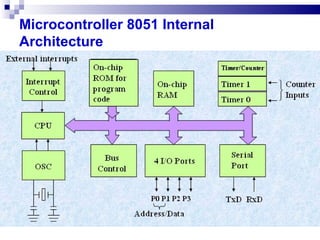
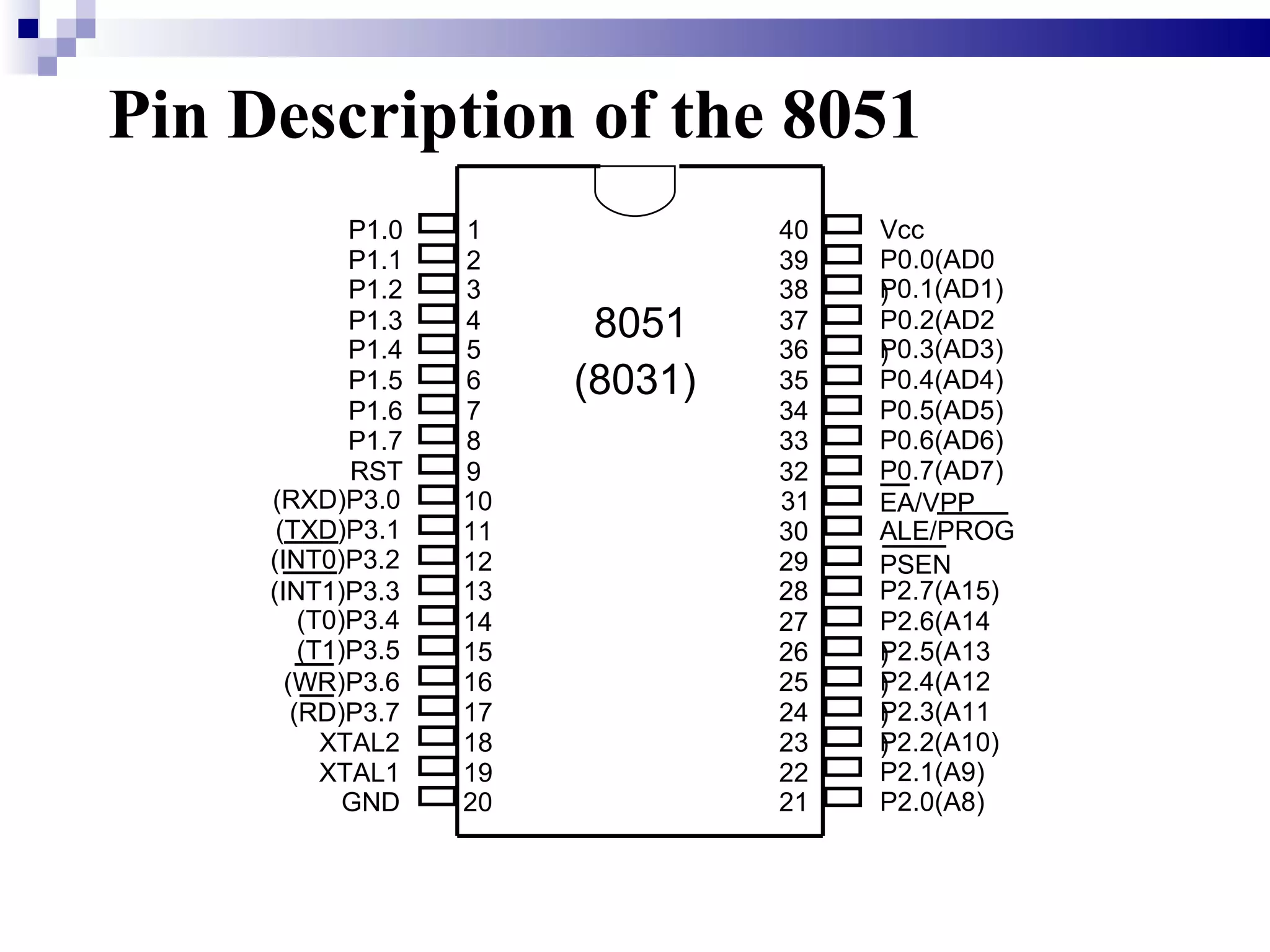
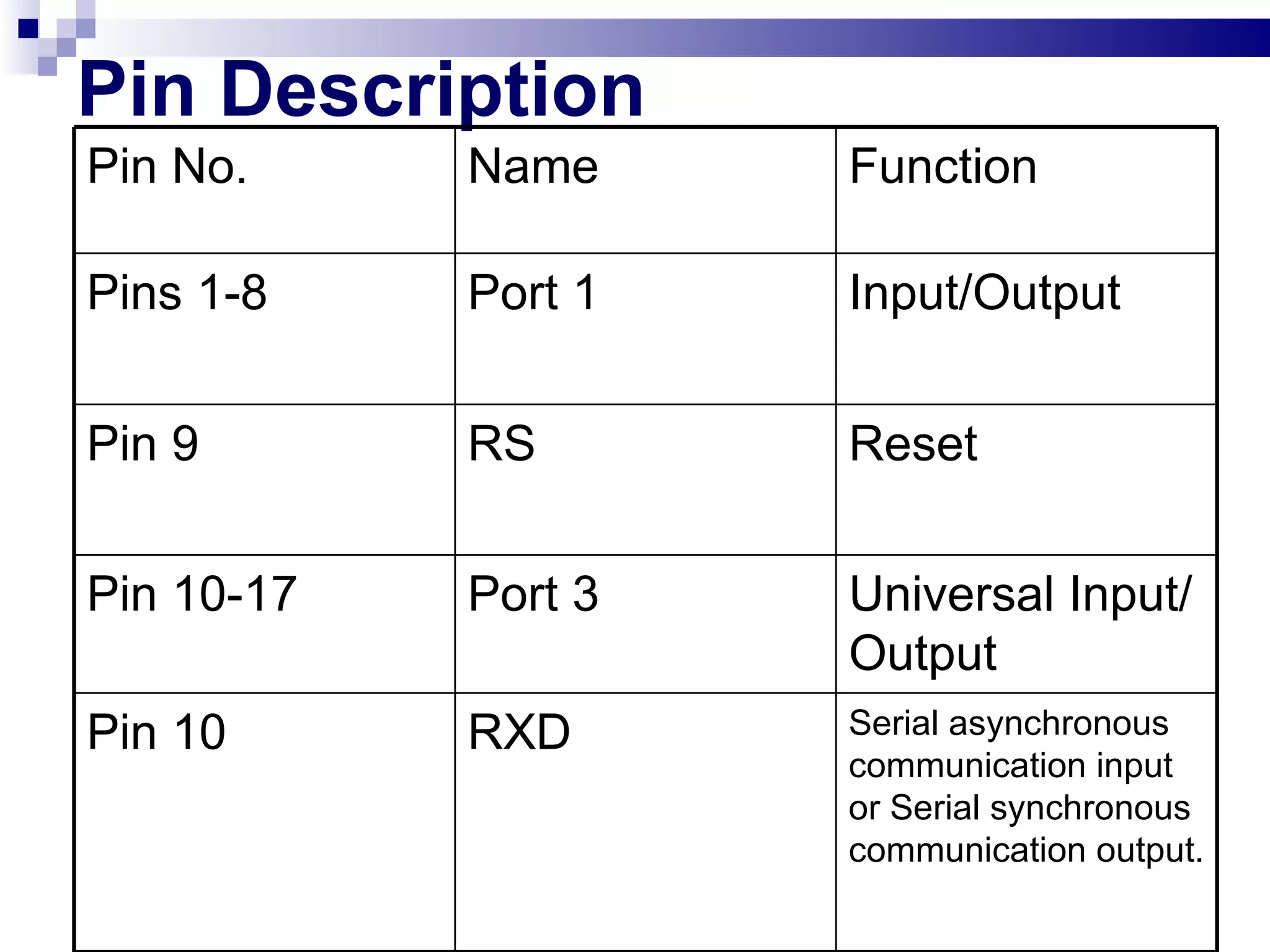
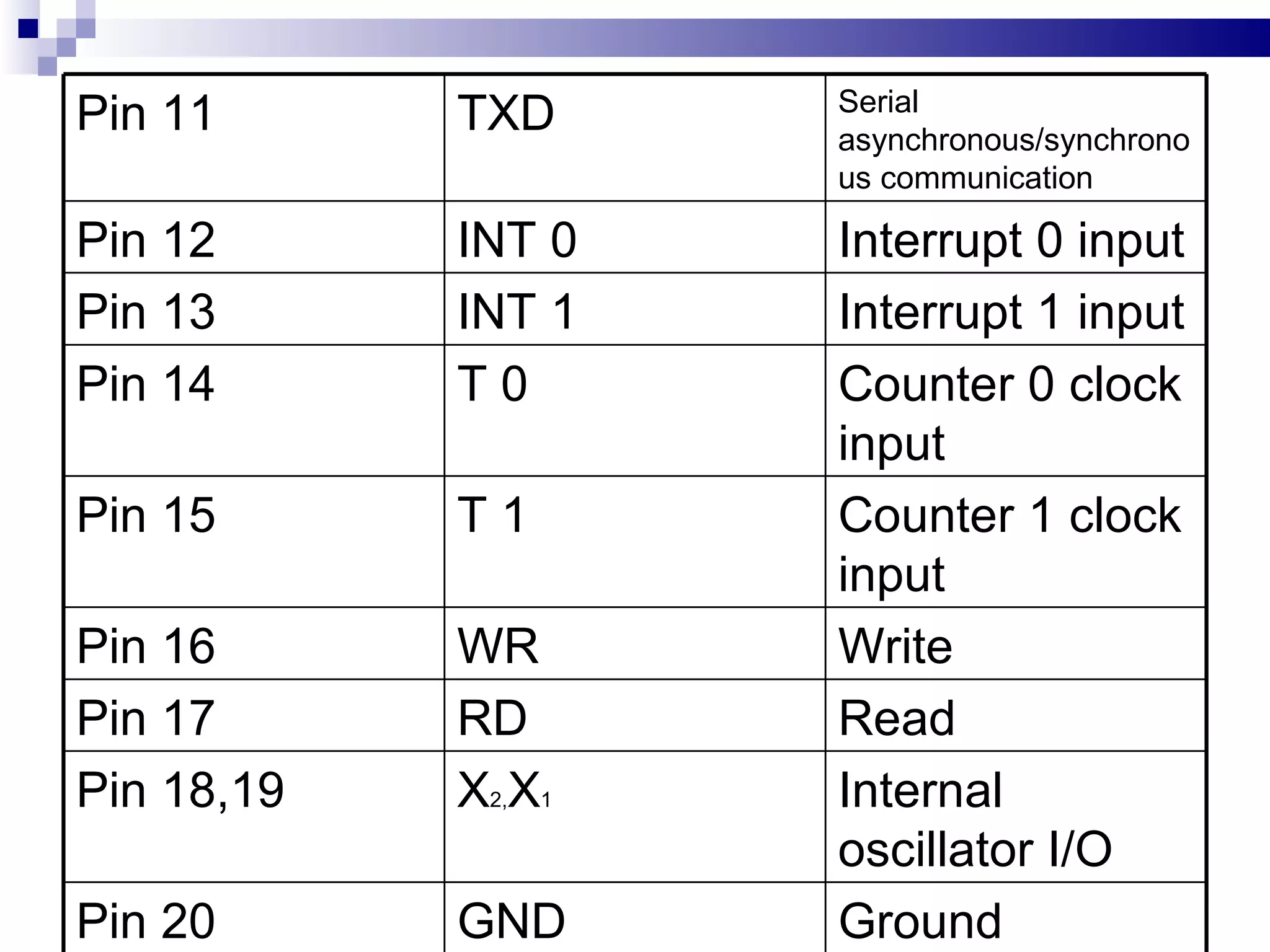
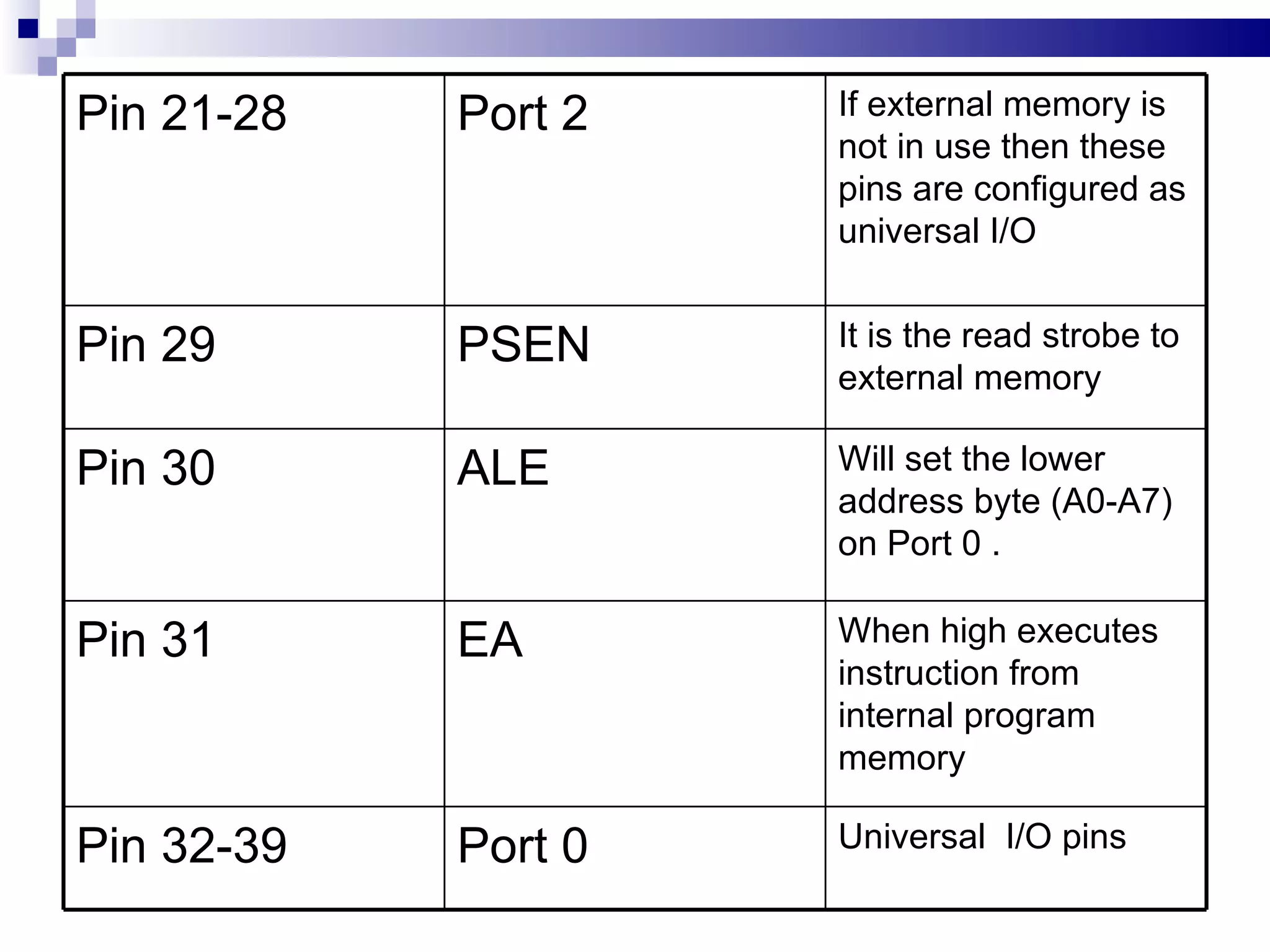
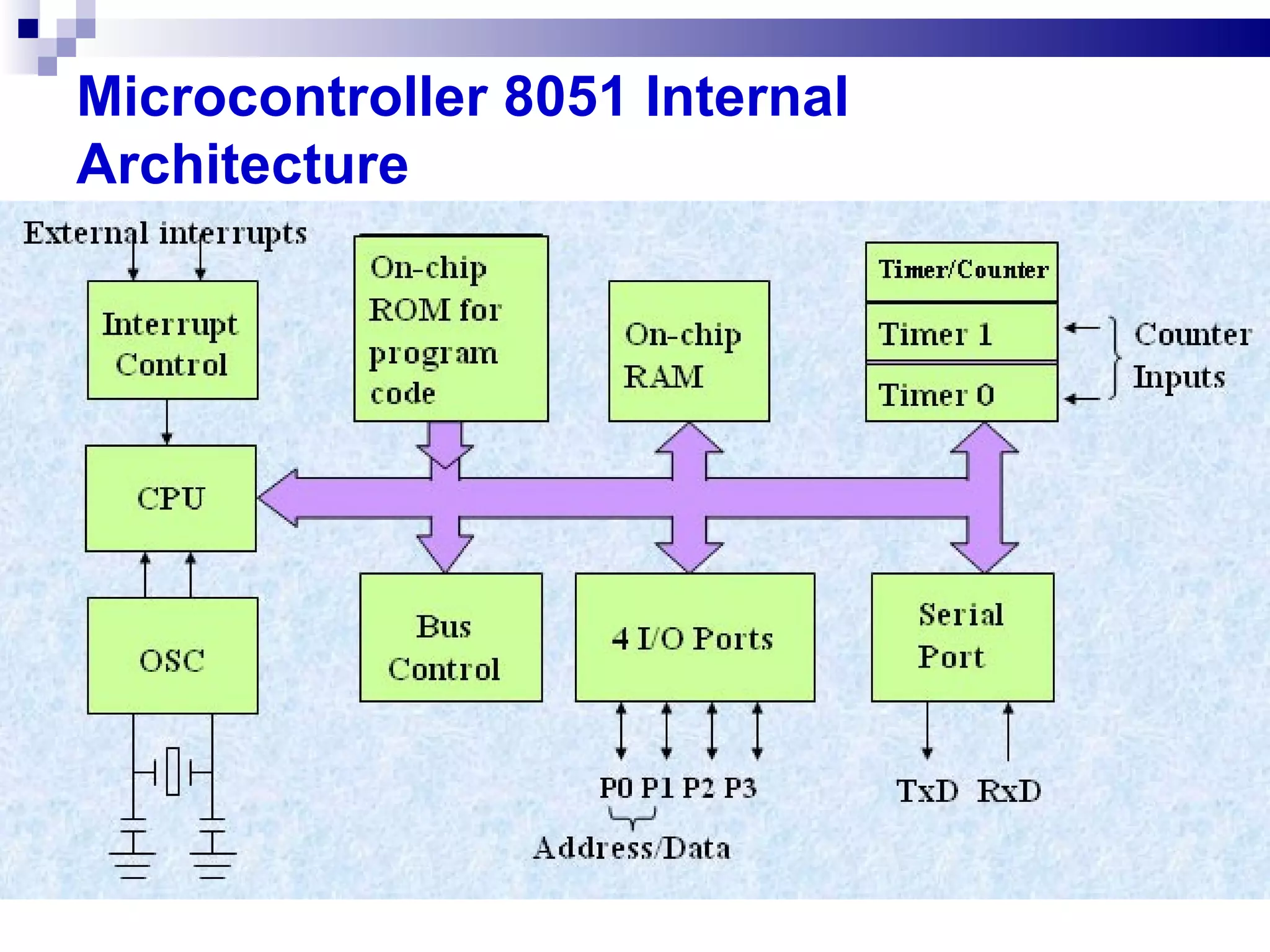
Technical details of the 8051 microcontroller, including pin descriptions and internal architecture.
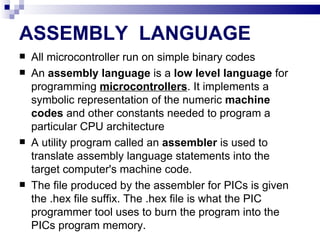
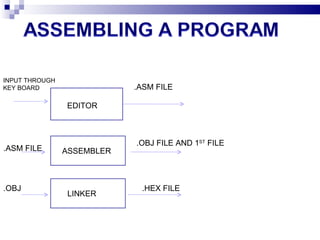
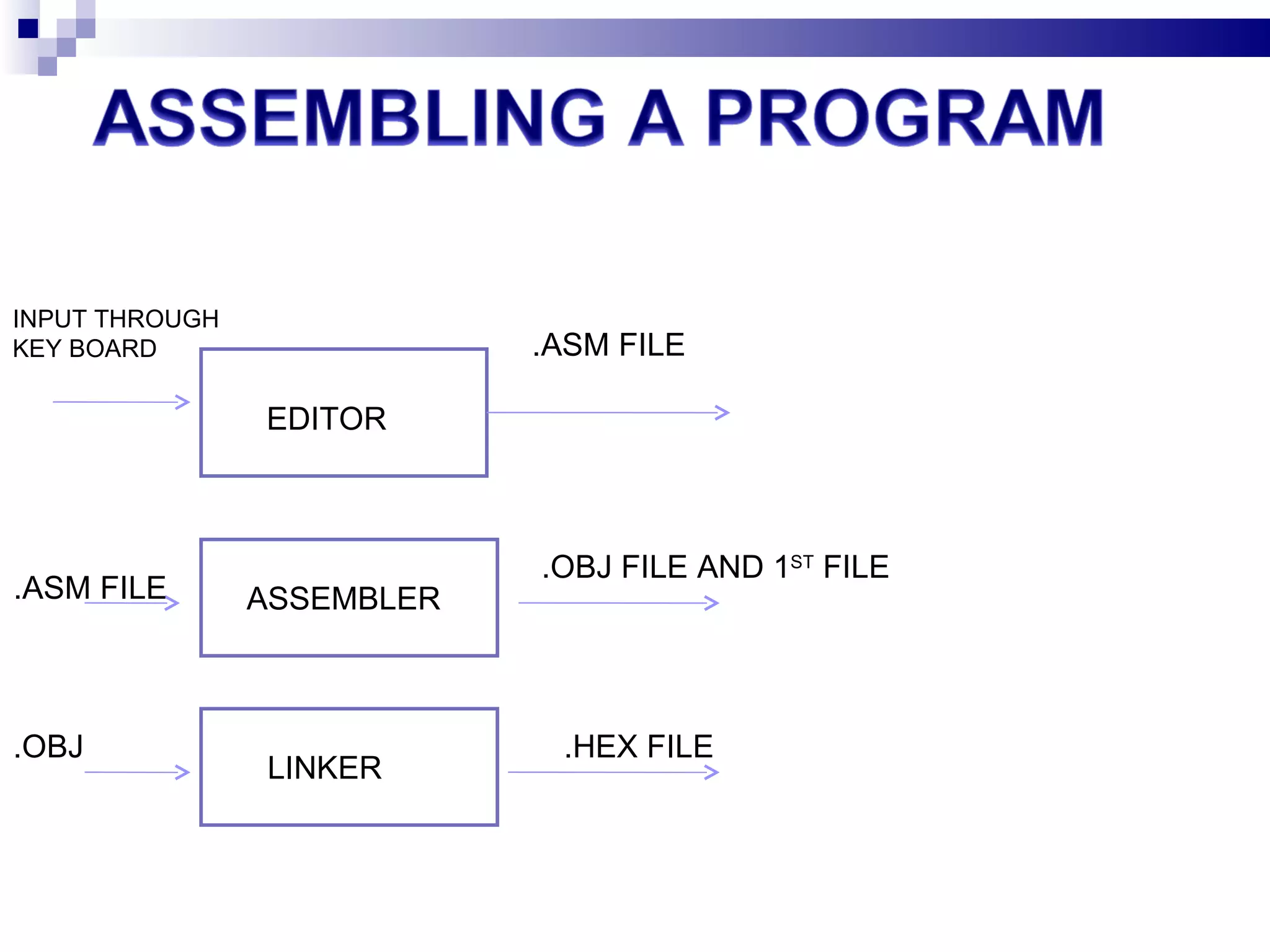
Explaining programming techniques in microcontrollers using Assembly and High-Level Languages.
Discussing the difficulties posed by embedded systems including reliability and complexity issues.






















































































