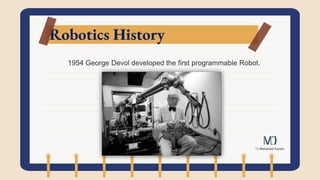
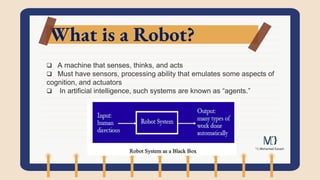
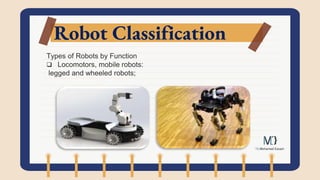
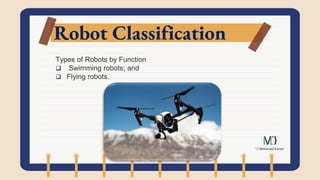

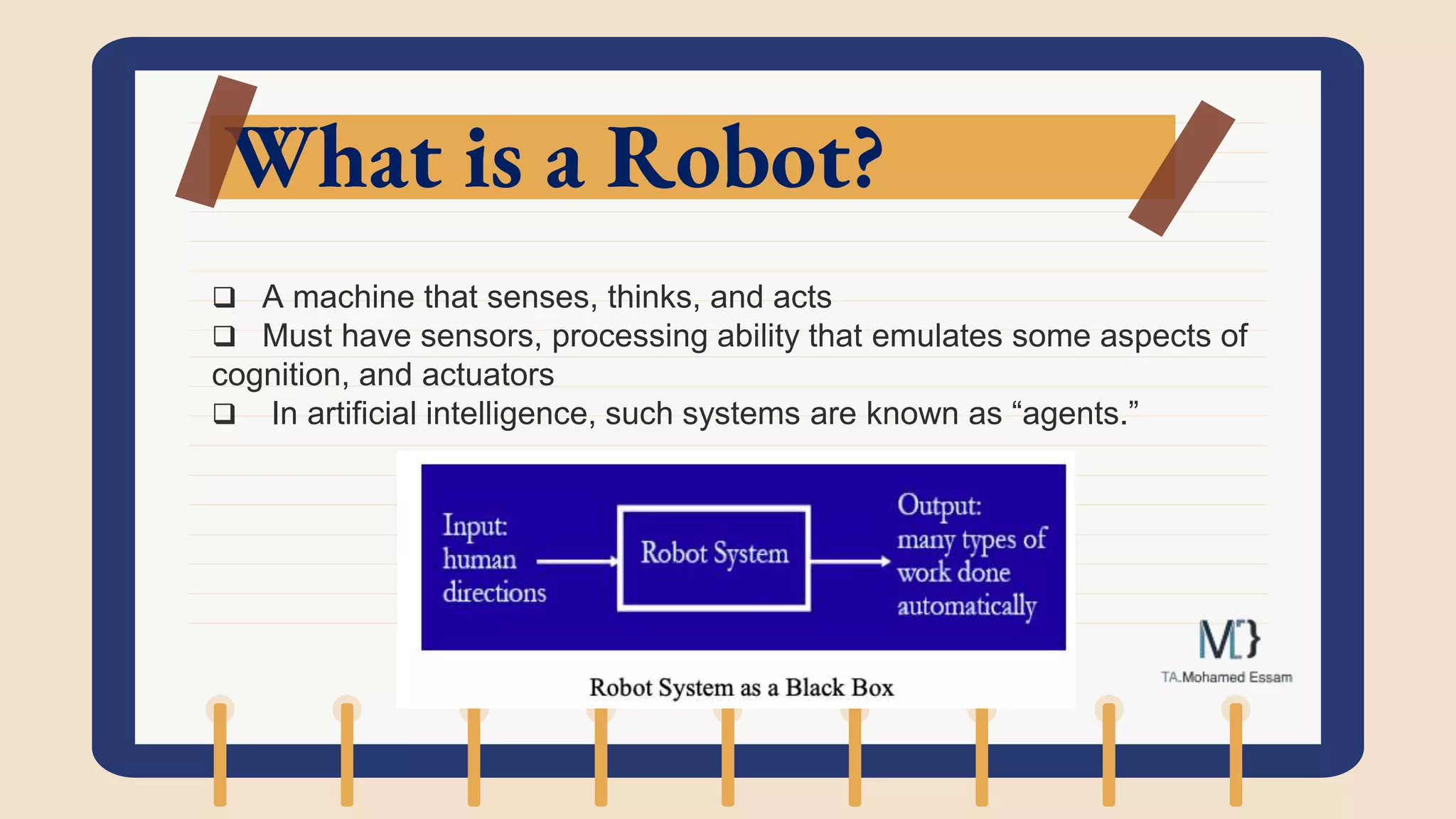
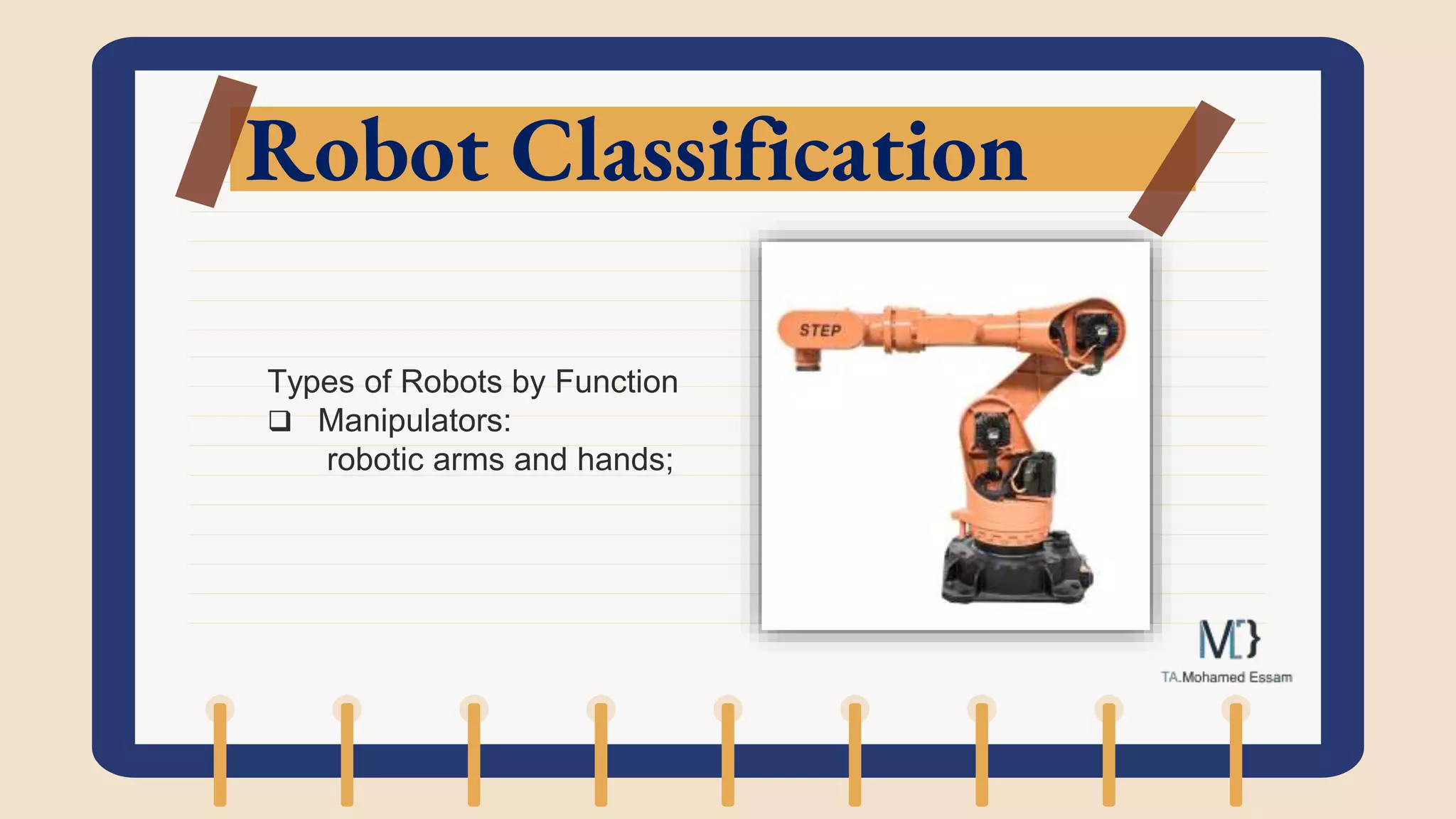
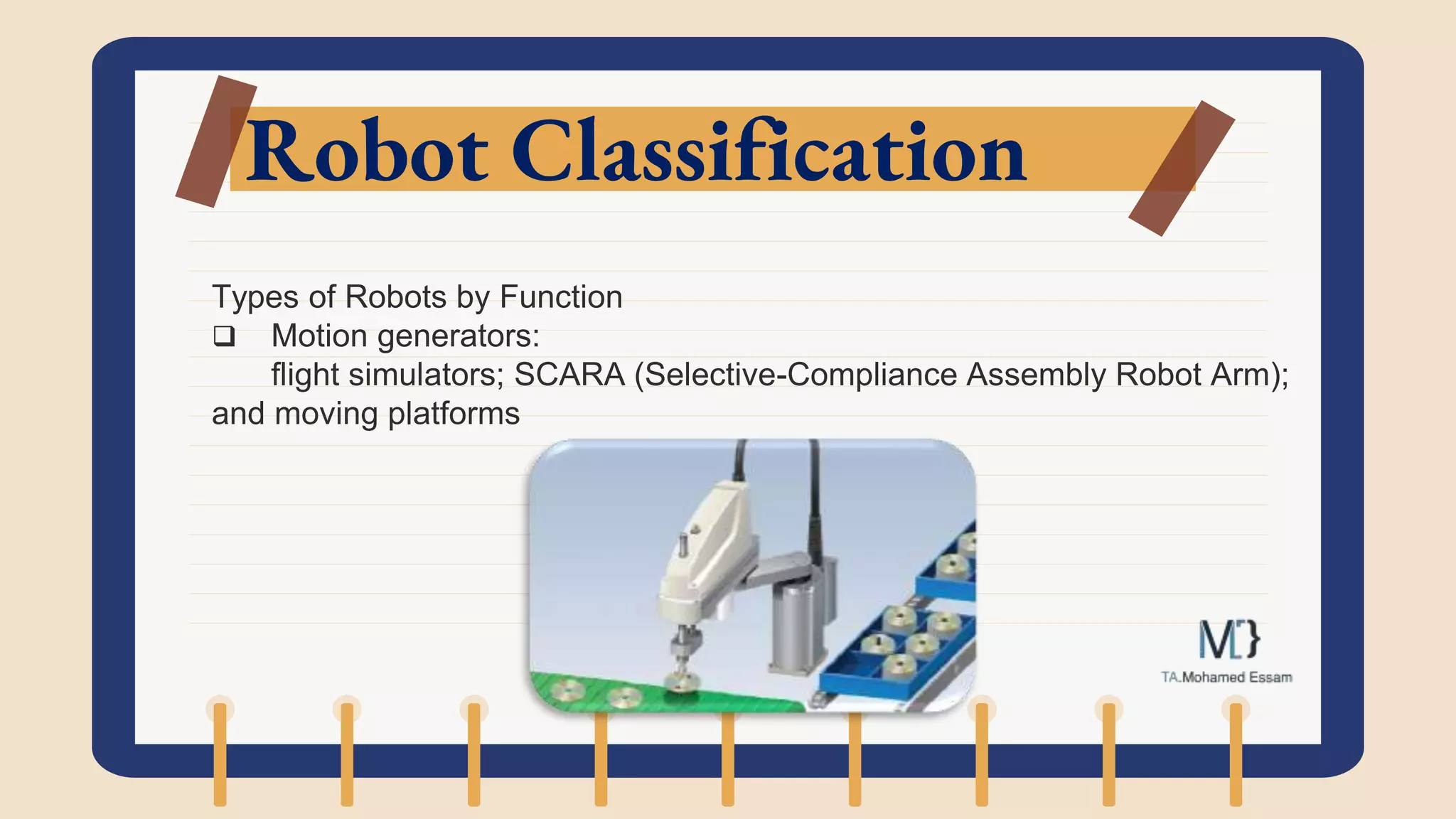
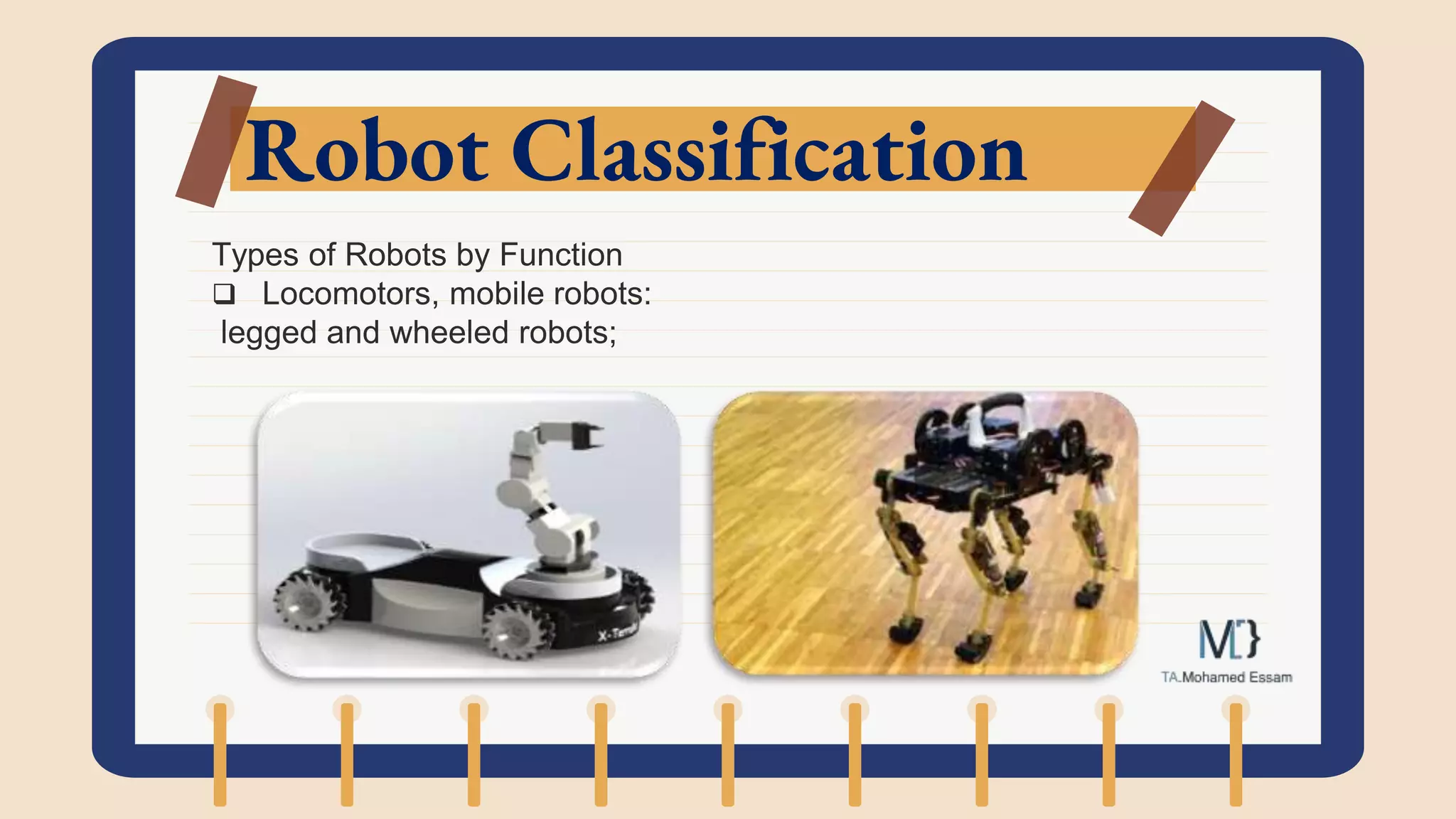



This document provides an introduction to robotics, including its history and key concepts. It discusses that the word "robot" was introduced in a 1922 story and the first programmable robot was developed in 1954. It also summarizes Isaac Asimov's Three Laws of Robotics from his 1950 short stories. The document defines a robot and outlines the main components of robots like manipulators, end effectors, actuators, sensors, controllers and software. It also categorizes types of robots by function and discusses common actuators, sensors and applications of robotics.



































































