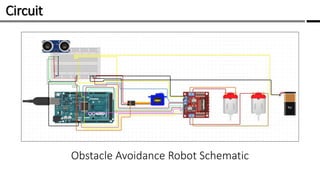
This document describes the components, working, circuit, source code, and scope of an obstacle avoidance robot powered by an Arduino. The main components are a chassis, Arduino UNO microcontroller, DC motor, motor driver, ultrasonic sensor, and servo motor. The robot uses the ultrasonic sensor to calculate distances and detects obstacles. It then controls the DC motor and servo motor using the motor driver and Arduino to avoid obstacles and navigate autonomously. The source code contains functions for movement, distance calculation, and sensor control. Potential applications discussed for further development include using it as a firefighting, mining, driverless vehicle, or cleaning robot.
Components /
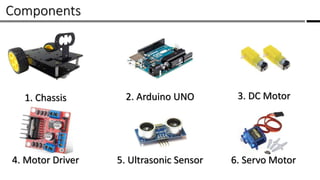
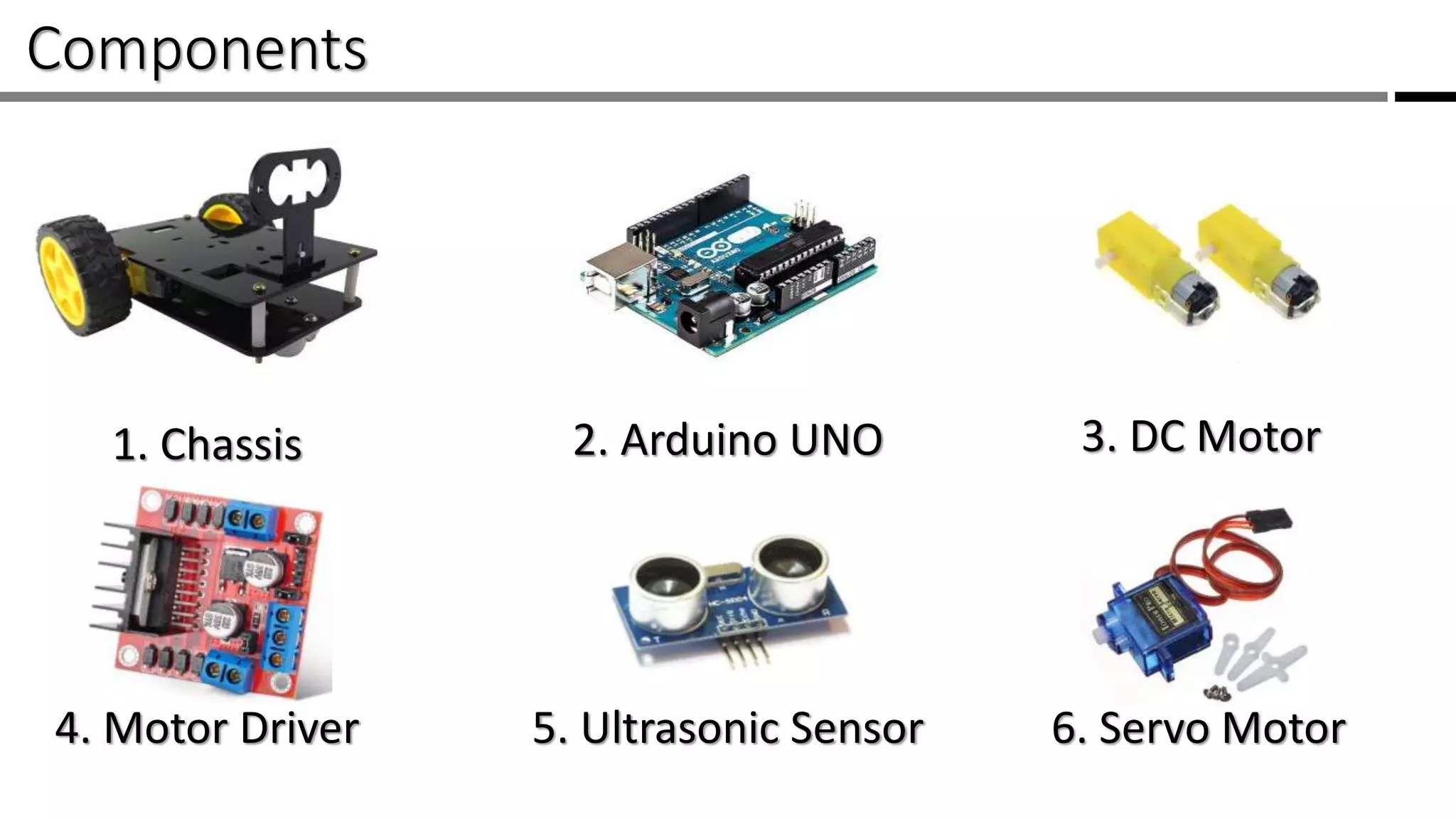
1. Chassis2. Arduino UNO 3. DC Motor
4. Motor Driver 6. Servo Motor5. Ultrasonic Sensor
5.
Components /
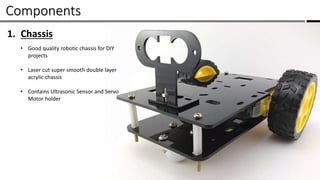
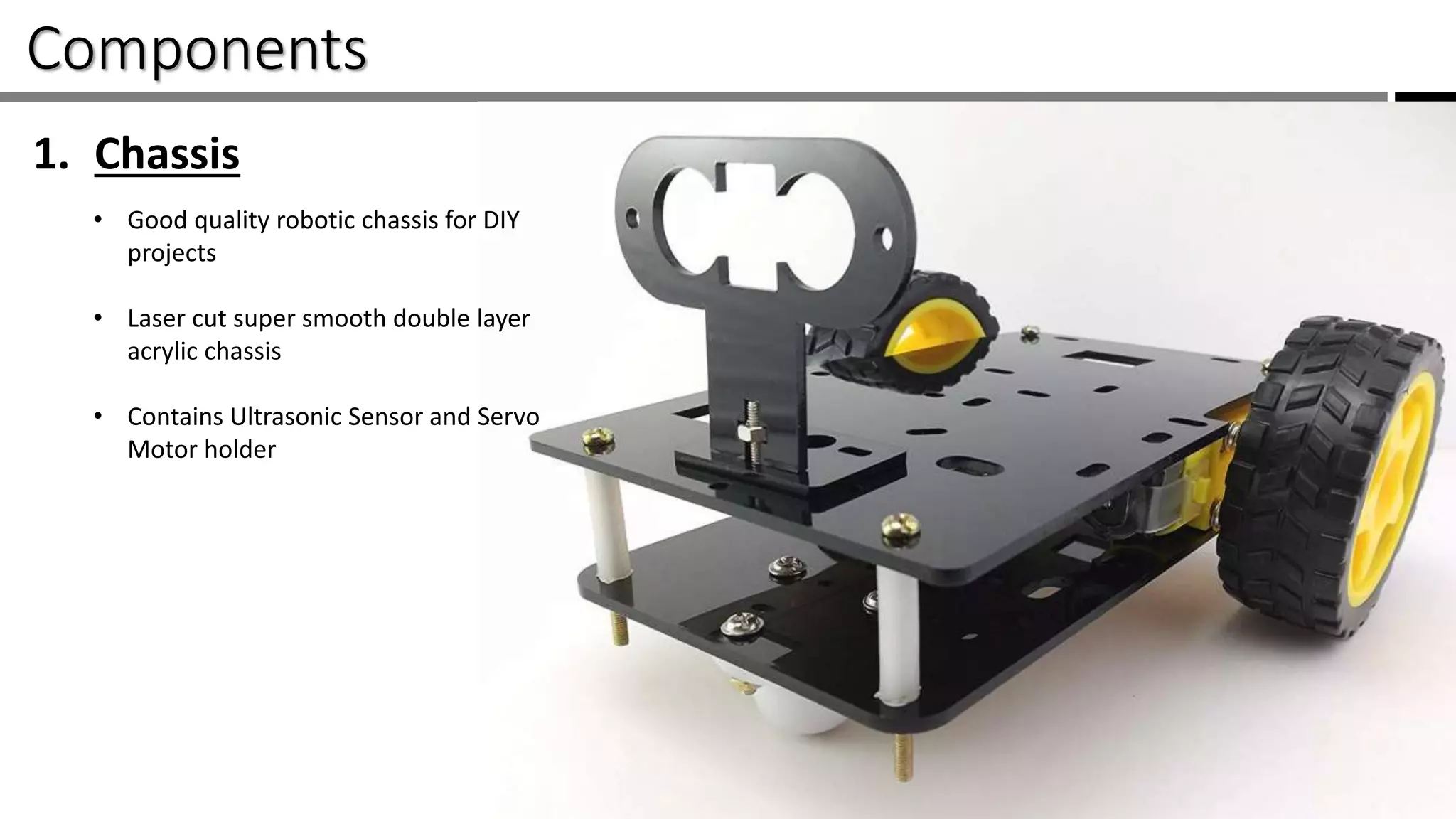
1. Chassis
•Good quality robotic chassis for DIY
projects
• Laser cut super smooth double layer
acrylic chassis
• Contains Ultrasonic Sensor and Servo
Motor holder
6.
Components /
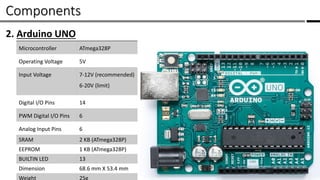
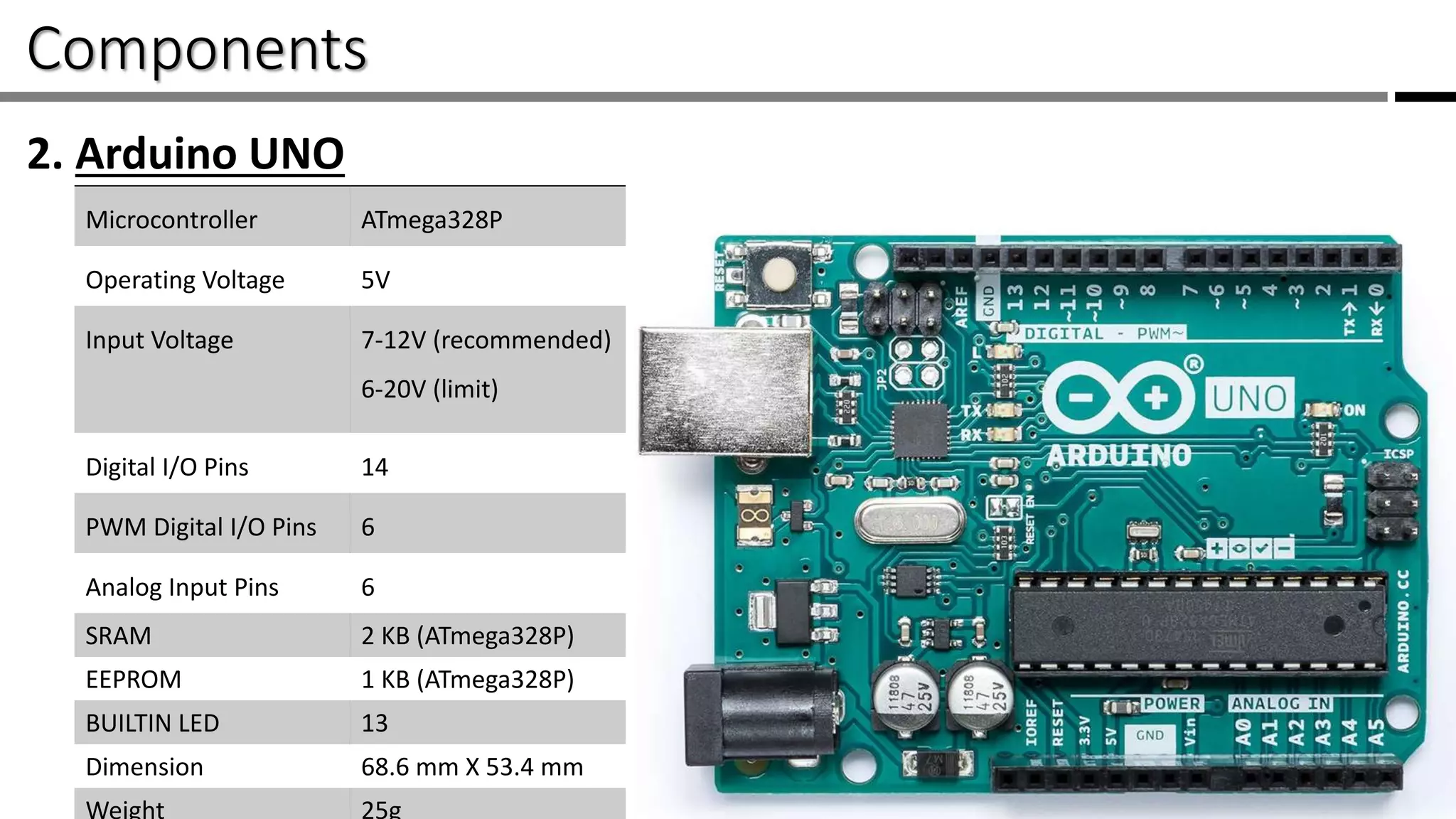
2. ArduinoUNO
Microcontroller ATmega328P
Operating Voltage 5V
Input Voltage 7-12V (recommended)
6-20V (limit)
Digital I/O Pins 14
PWM Digital I/O Pins 6
Analog Input Pins 6
SRAM 2 KB (ATmega328P)
EEPROM 1 KB (ATmega328P)
BUILTIN LED 13
Dimension 68.6 mm X 53.4 mm
Weight 25g
7.
Components /
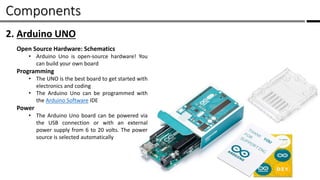
2. ArduinoUNO
Open Source Hardware: Schematics
• Arduino Uno is open-source hardware! You
can build your own board
Programming
• The UNO is the best board to get started with
electronics and coding
• The Arduino Uno can be programmed with
the Arduino Software IDE
Power
• The Arduino Uno board can be powered via
the USB connection or with an external
power supply from 6 to 20 volts. The power
source is selected automatically
8.
Components /
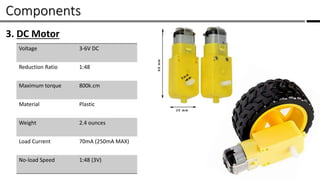
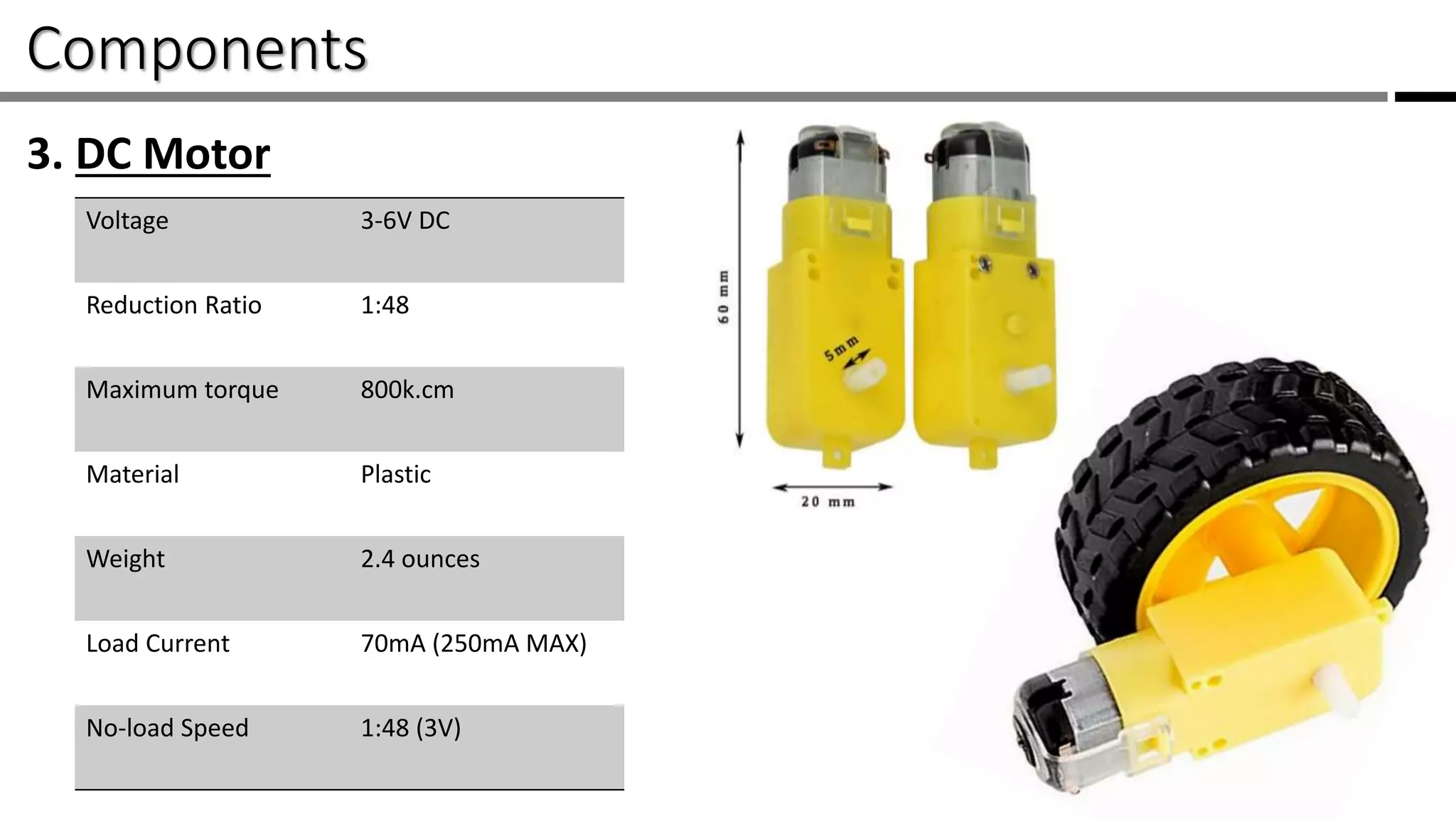
3. DCMotor
Voltage 3-6V DC
Reduction Ratio 1:48
Maximum torque 800k.cm
Material Plastic
Weight 2.4 ounces
Load Current 70mA (250mA MAX)
No-load Speed 1:48 (3V)
9.
Components /
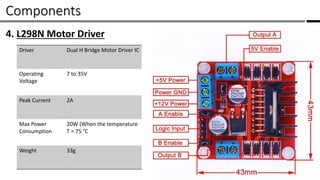
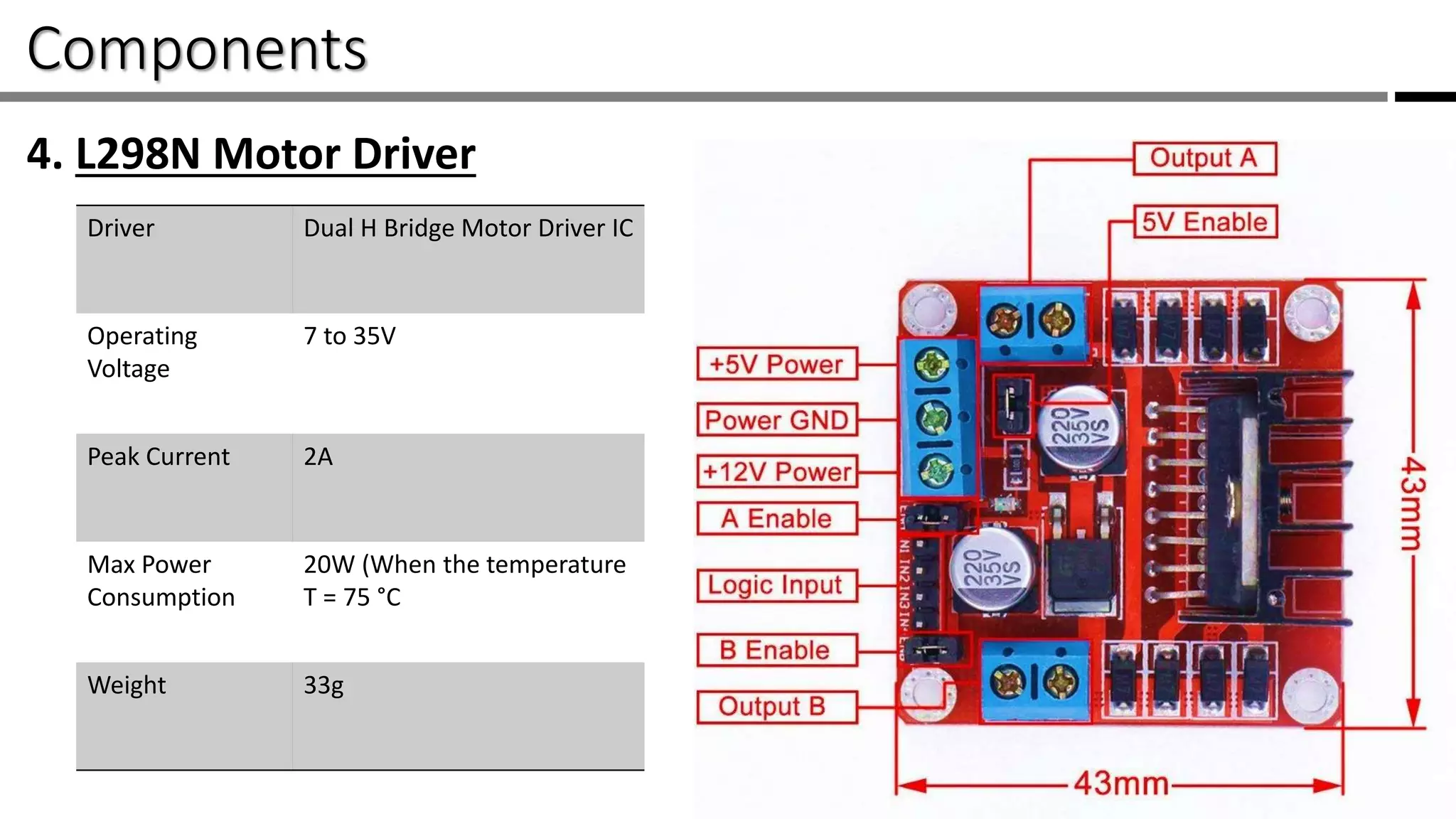
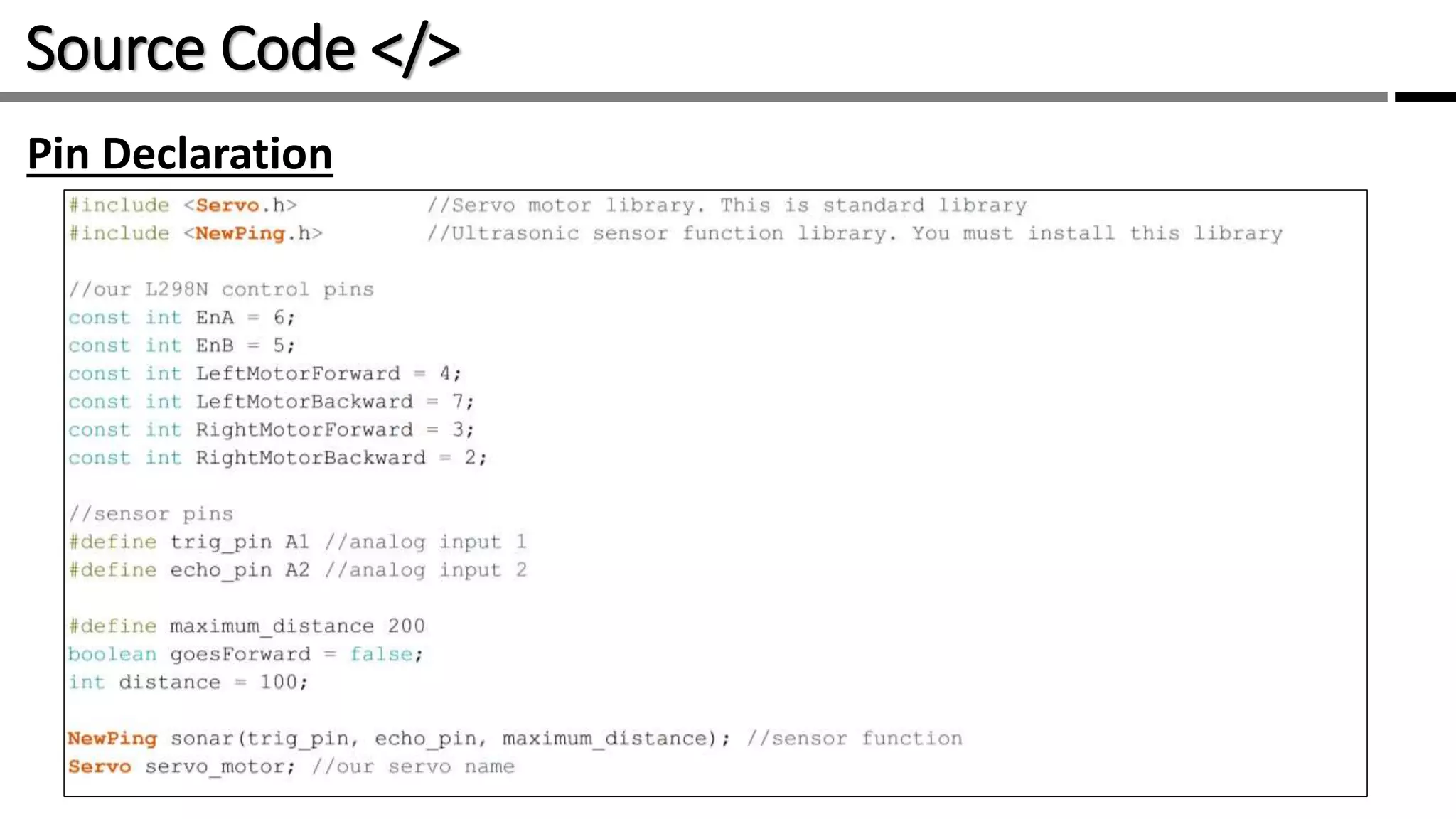
4. L298NMotor Driver
Driver Dual H Bridge Motor Driver IC
Operating
Voltage
7 to 35V
Peak Current 2A
Max Power
Consumption
20W (When the temperature
T = 75 °C
Weight 33g
10.
Components /
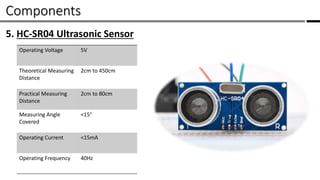
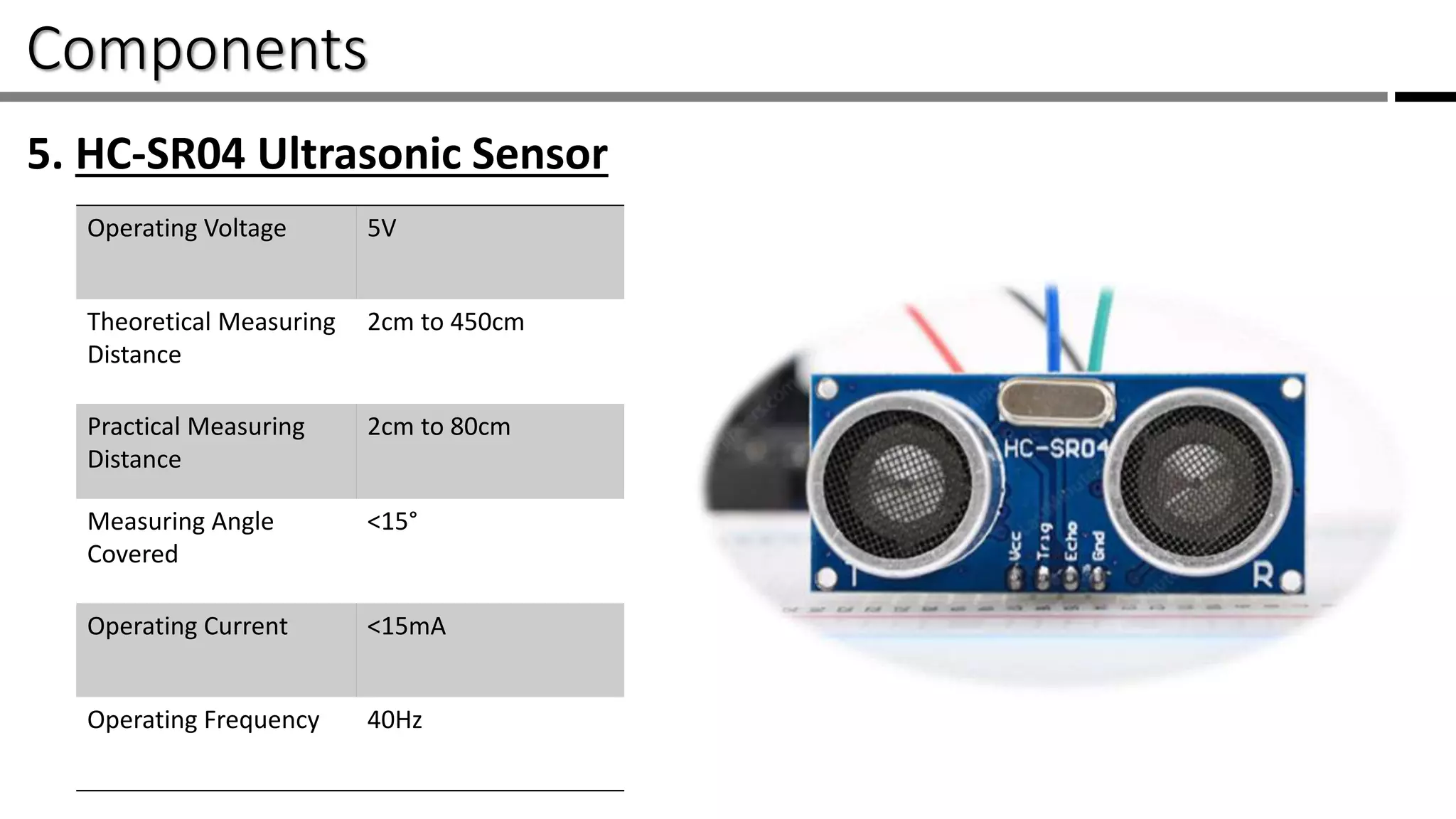
5. HC-SR04Ultrasonic Sensor
Operating Voltage 5V
Theoretical Measuring
Distance
2cm to 450cm
Practical Measuring
Distance
2cm to 80cm
Measuring Angle
Covered
<15°
Operating Current <15mA
Operating Frequency 40Hz
11.
Components /
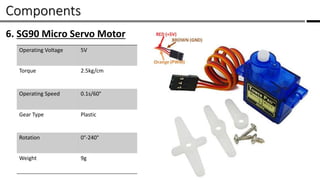
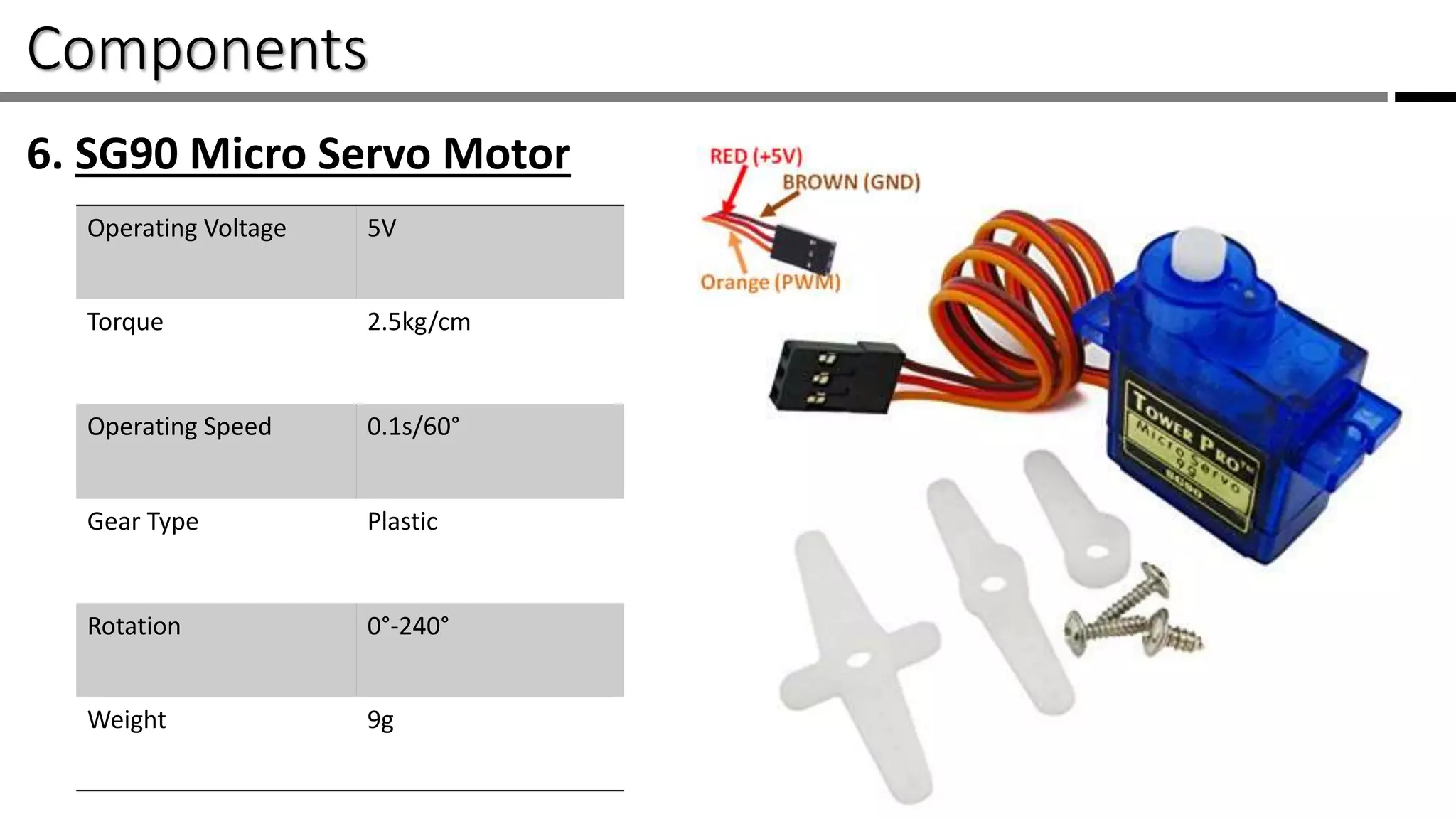
6. SG90Micro Servo Motor
Operating Voltage 5V
Torque 2.5kg/cm
Operating Speed 0.1s/60°
Gear Type Plastic
Rotation 0°-240°
Weight 9g
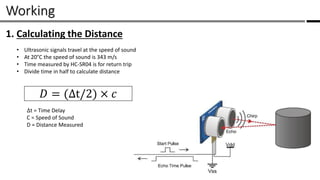
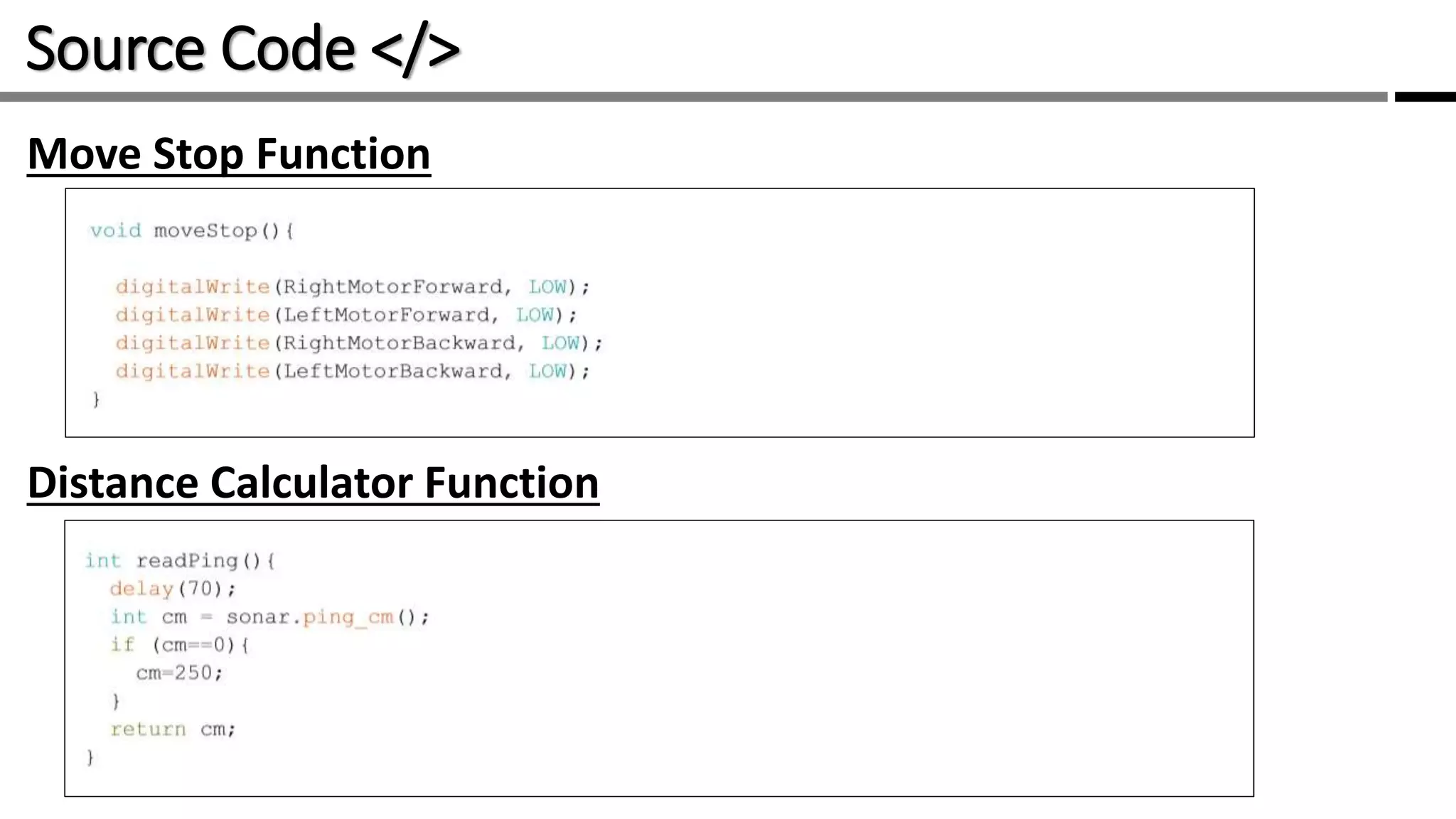
Working /
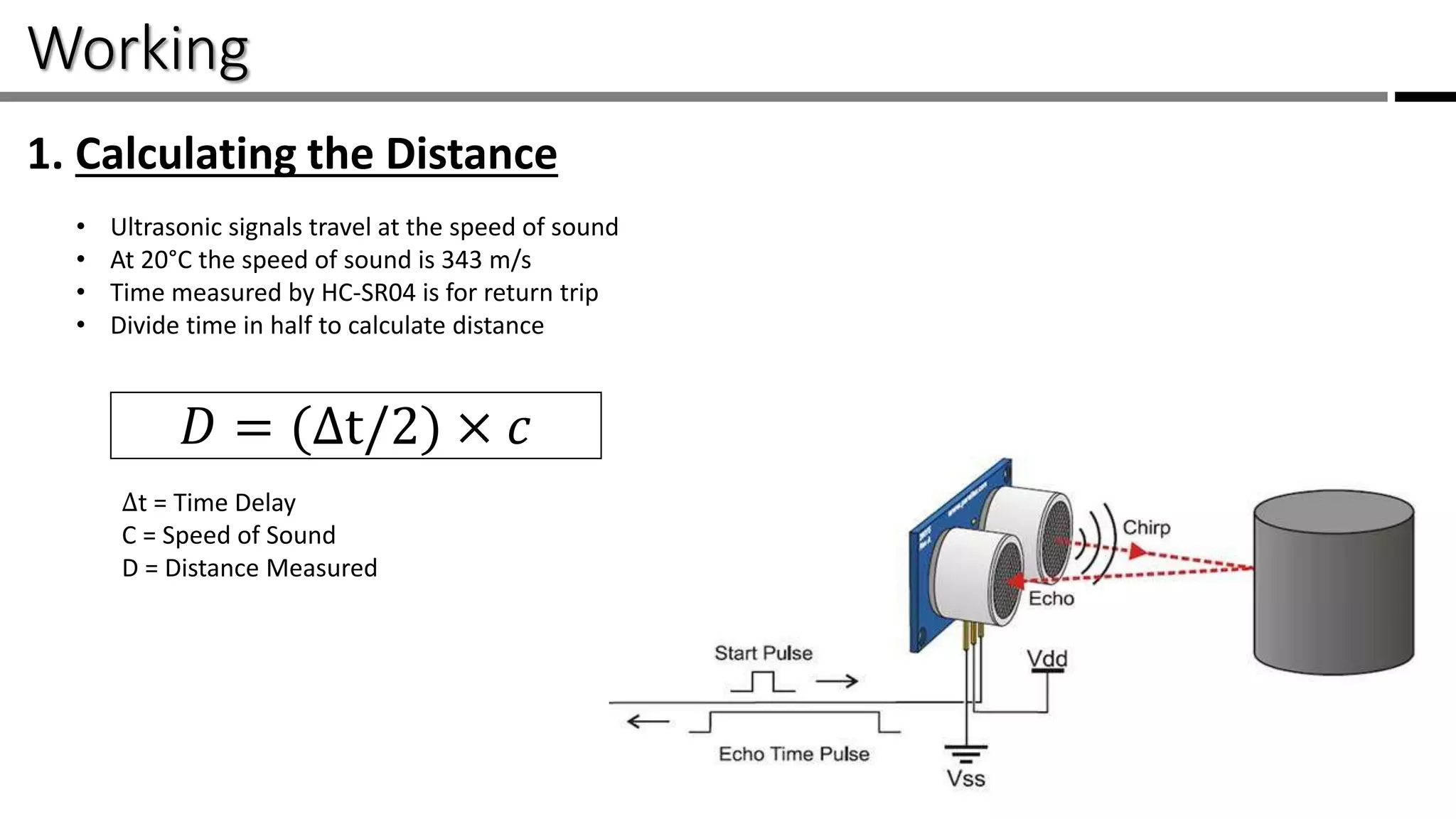
1. Calculatingthe Distance
• Ultrasonic signals travel at the speed of sound
• At 20°C the speed of sound is 343 m/s
• Time measured by HC-SR04 is for return trip
• Divide time in half to calculate distance
𝐷 = (Δt/2) × 𝑐
Δt = Time Delay
C = Speed of Sound
D = Distance Measured
14.
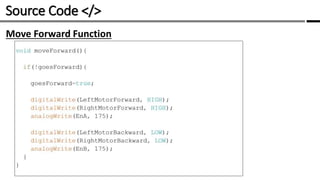
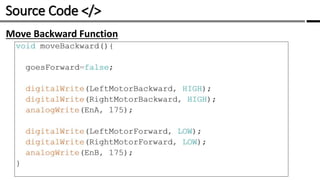
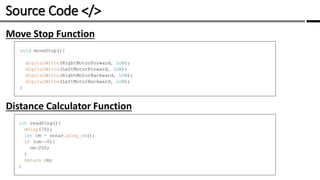
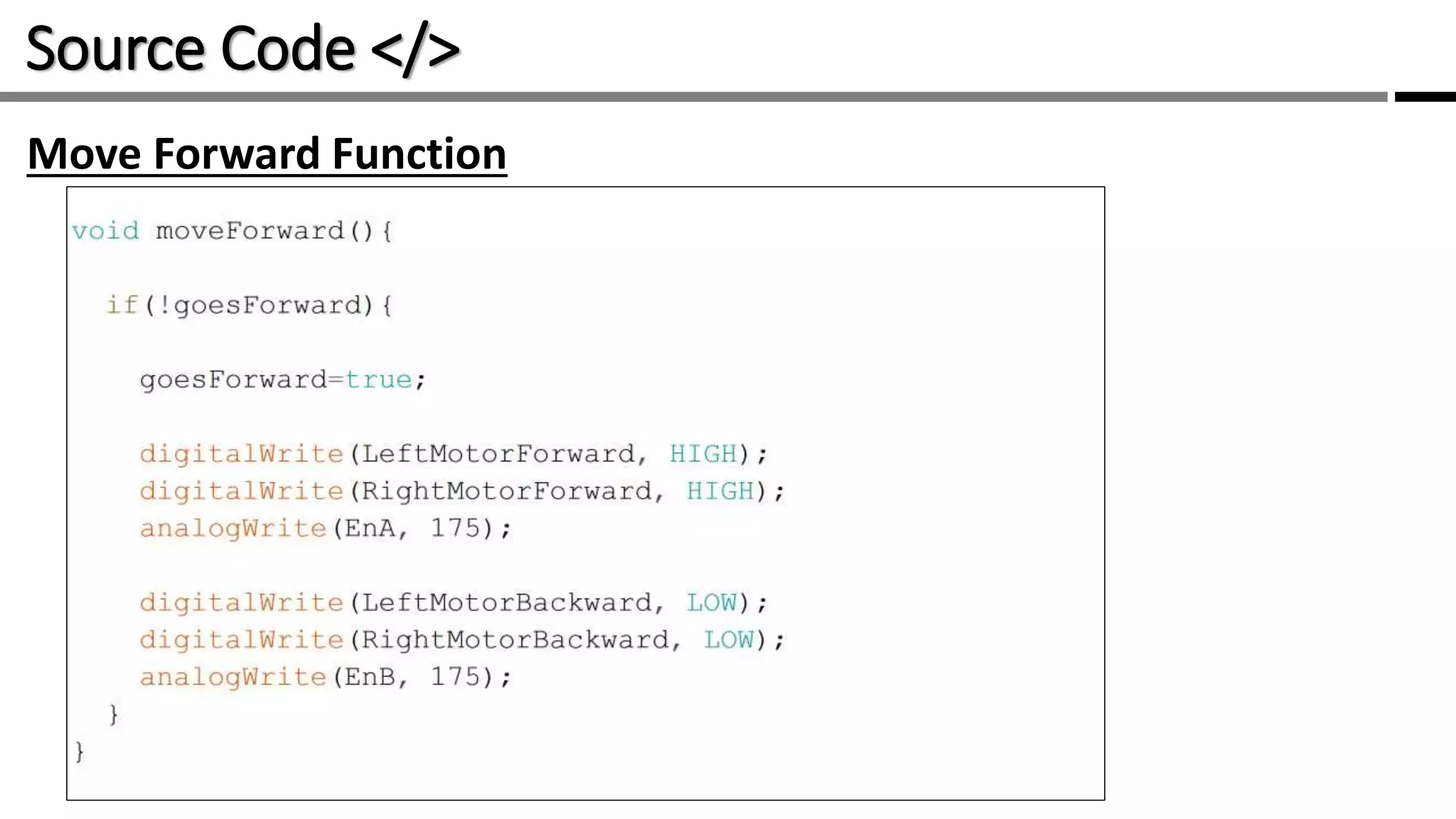
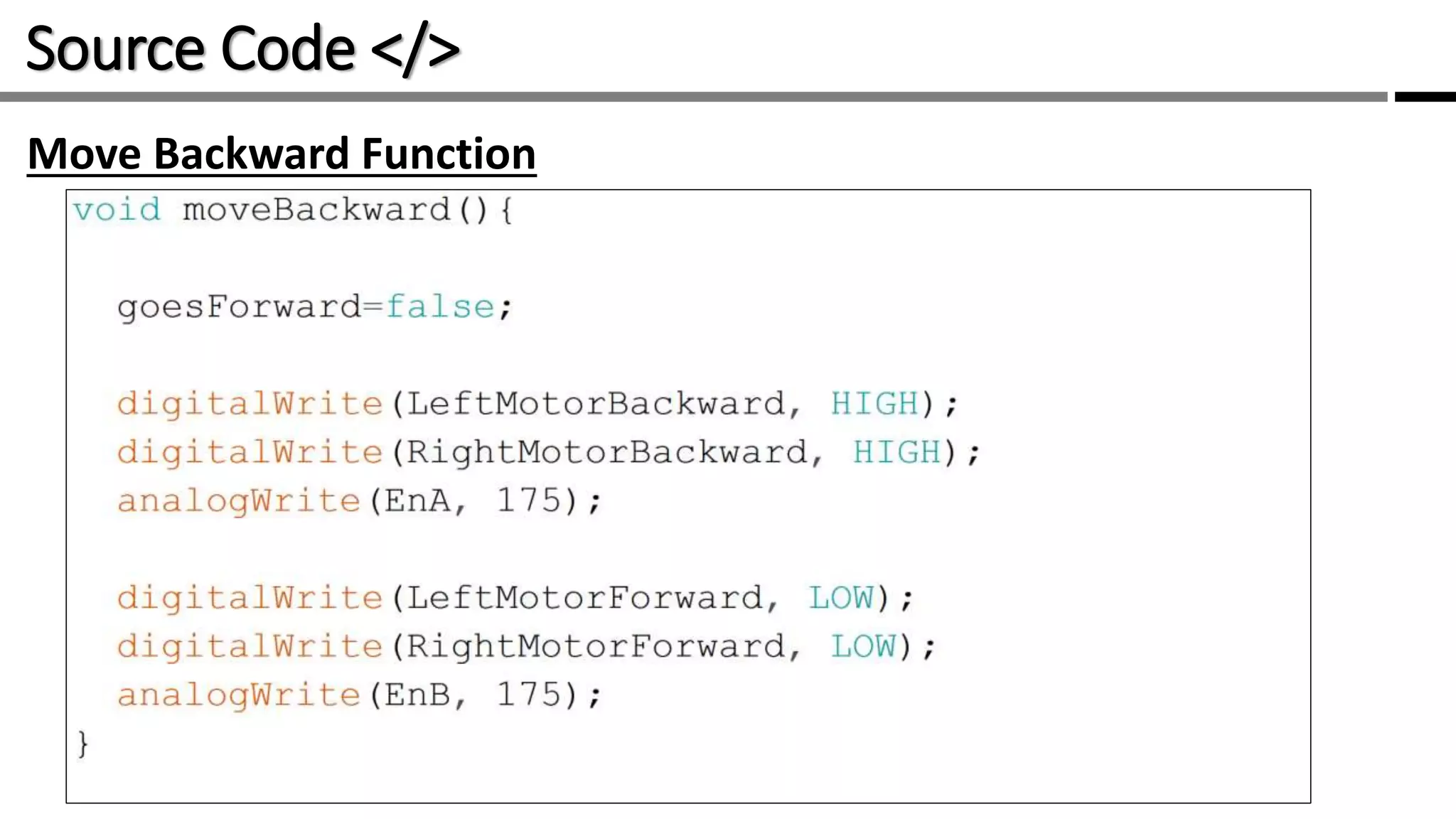
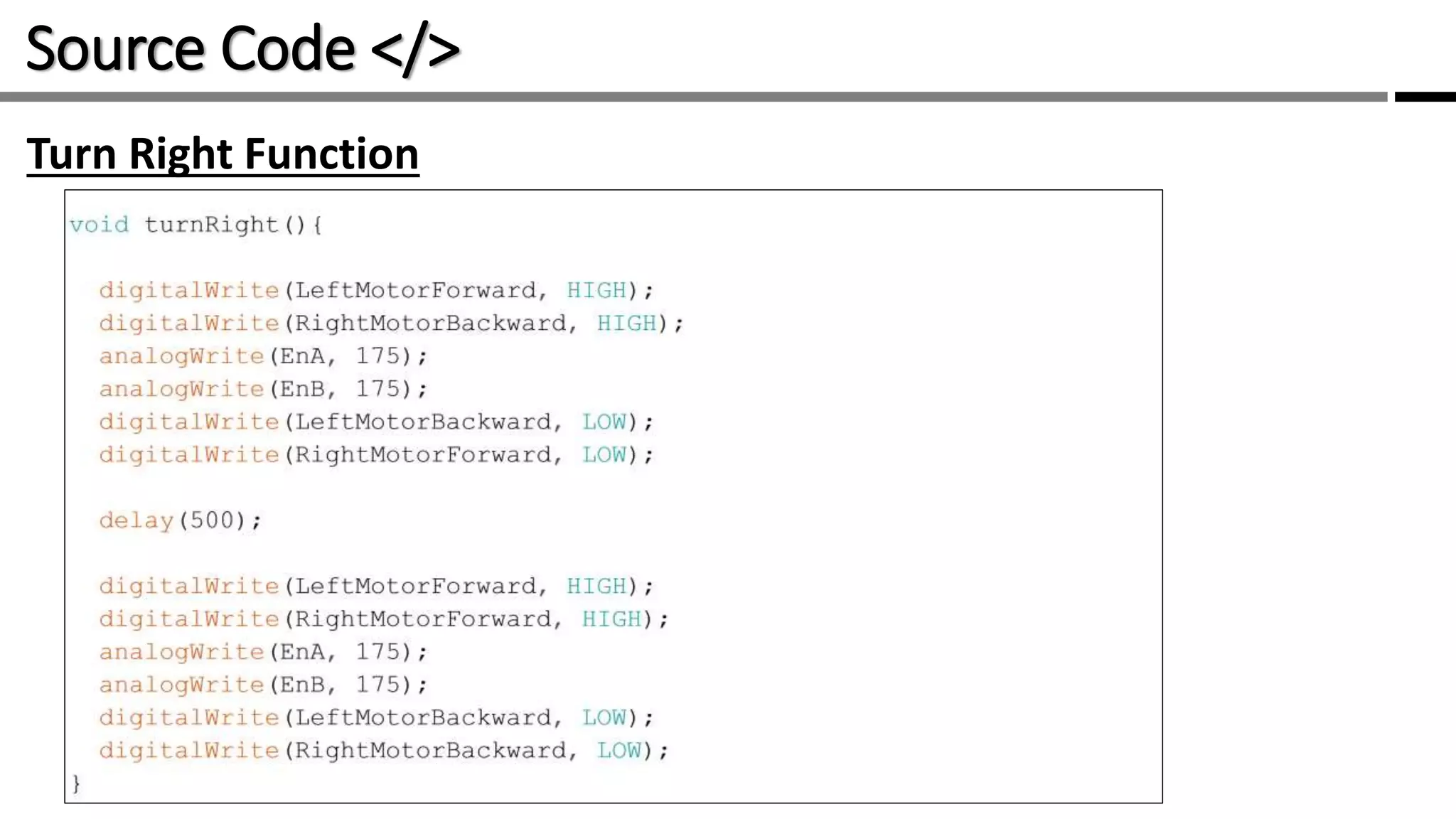
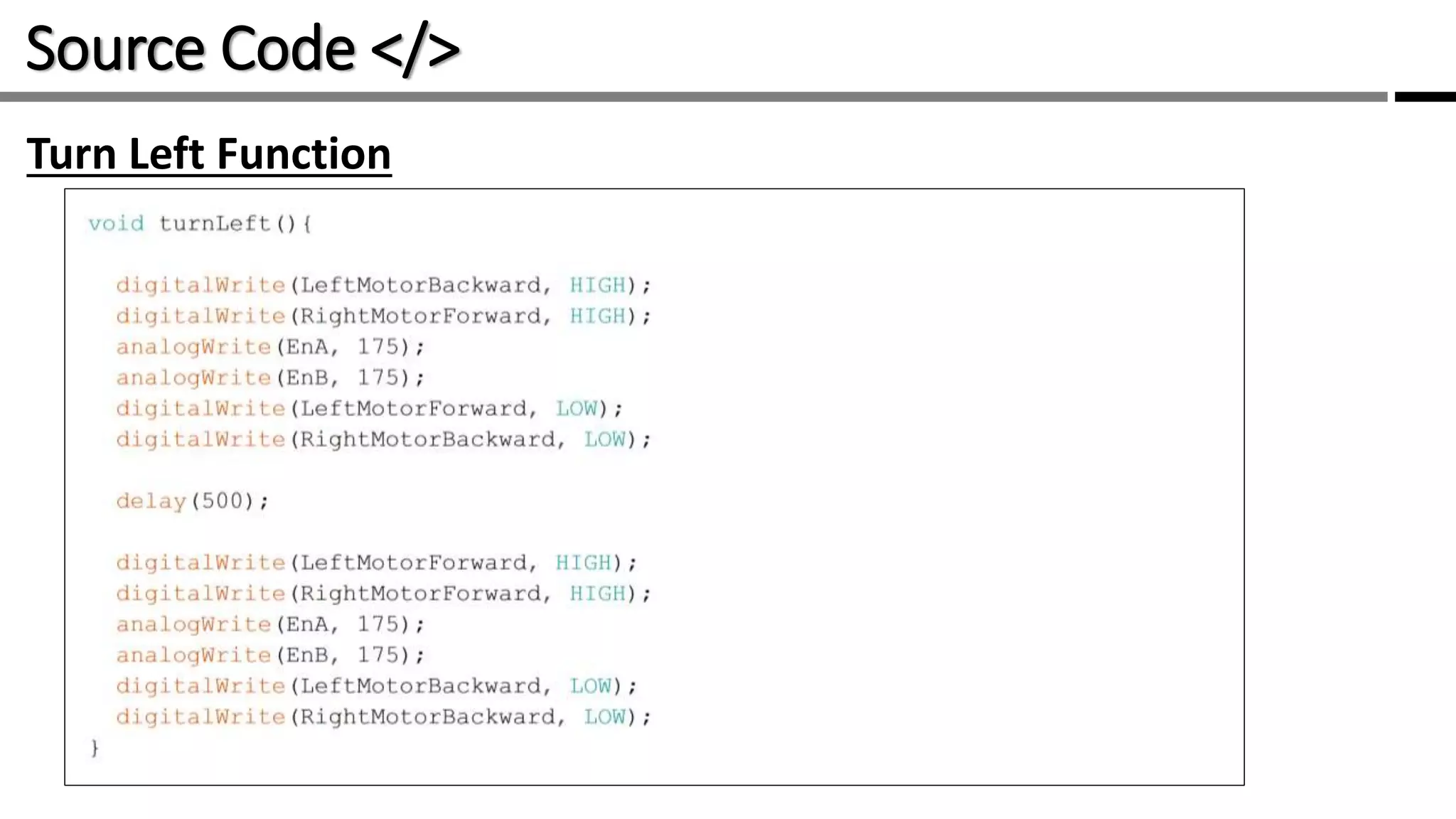
Working /
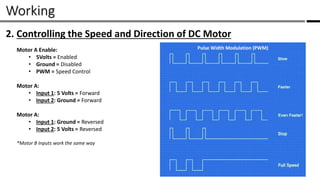
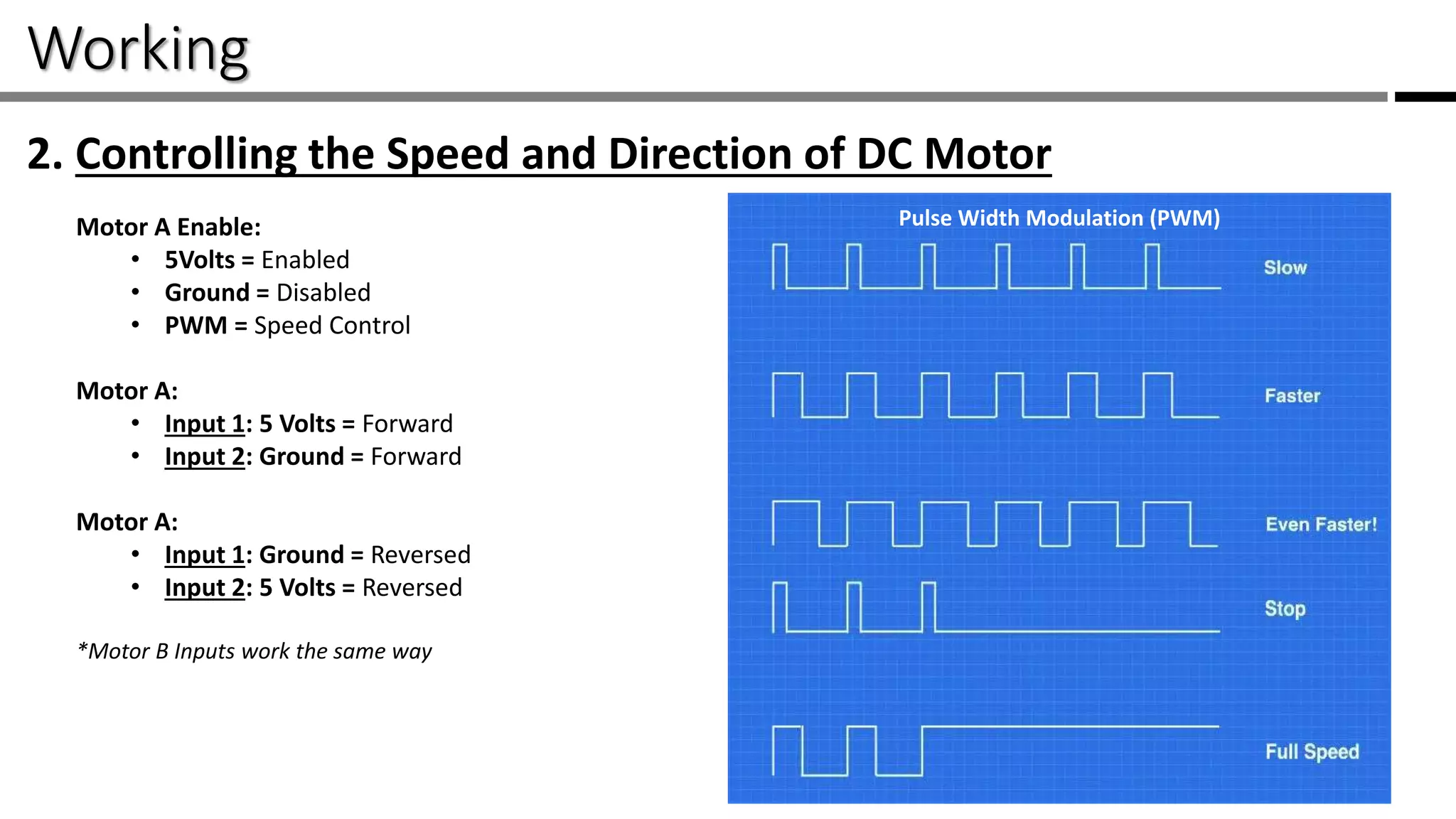
2. Controllingthe Speed and Direction of DC Motor
Motor A Enable:
• 5Volts = Enabled
• Ground = Disabled
• PWM = Speed Control
Motor A:
• Input 1: 5 Volts = Forward
• Input 2: Ground = Forward
Motor A:
• Input 1: Ground = Reversed
• Input 2: 5 Volts = Reversed
*Motor B Inputs work the same way
Pulse Width Modulation (PWM)
15.
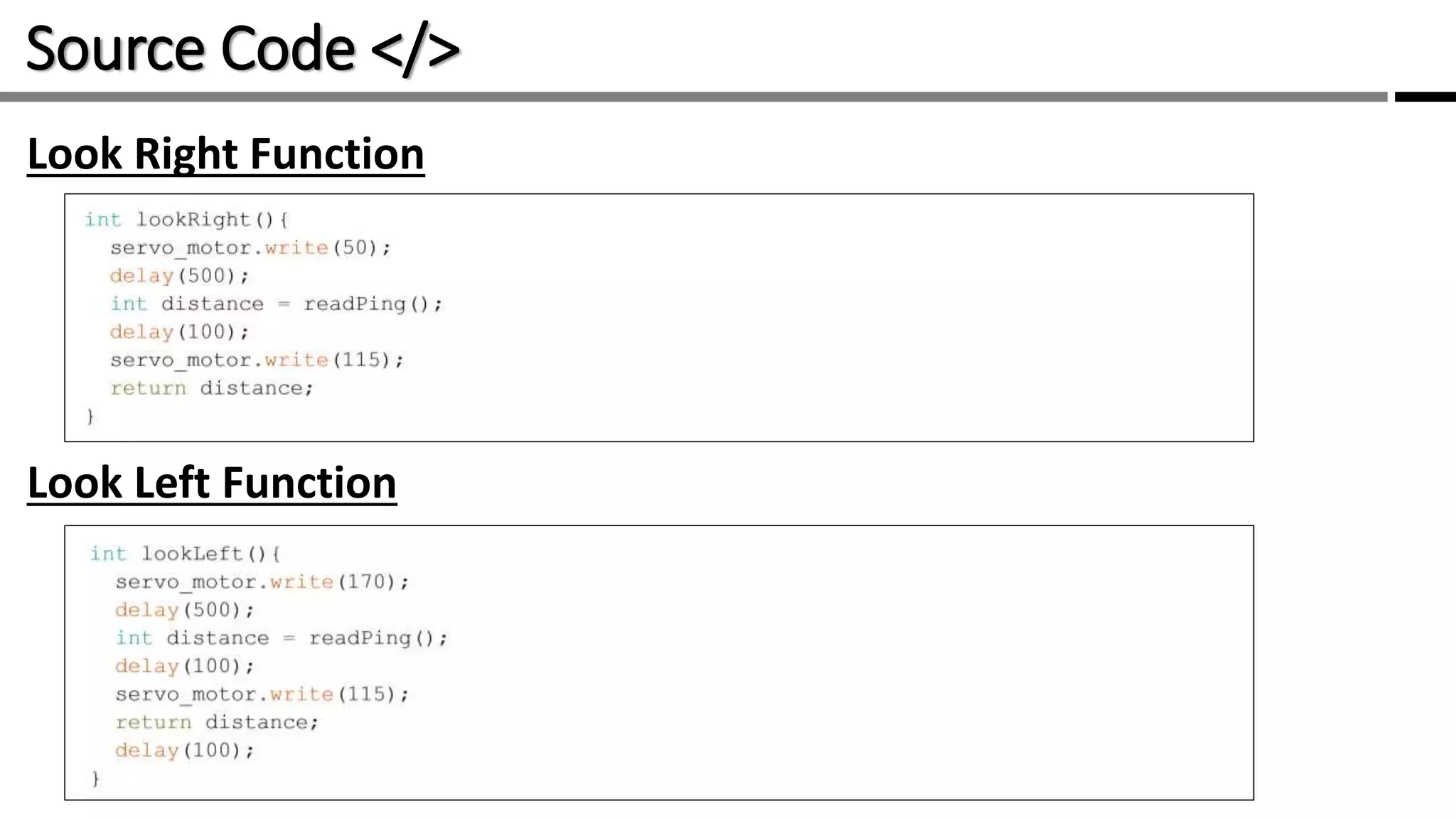
Working /
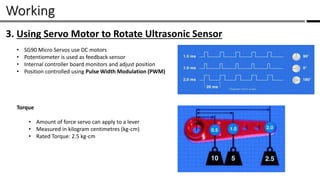
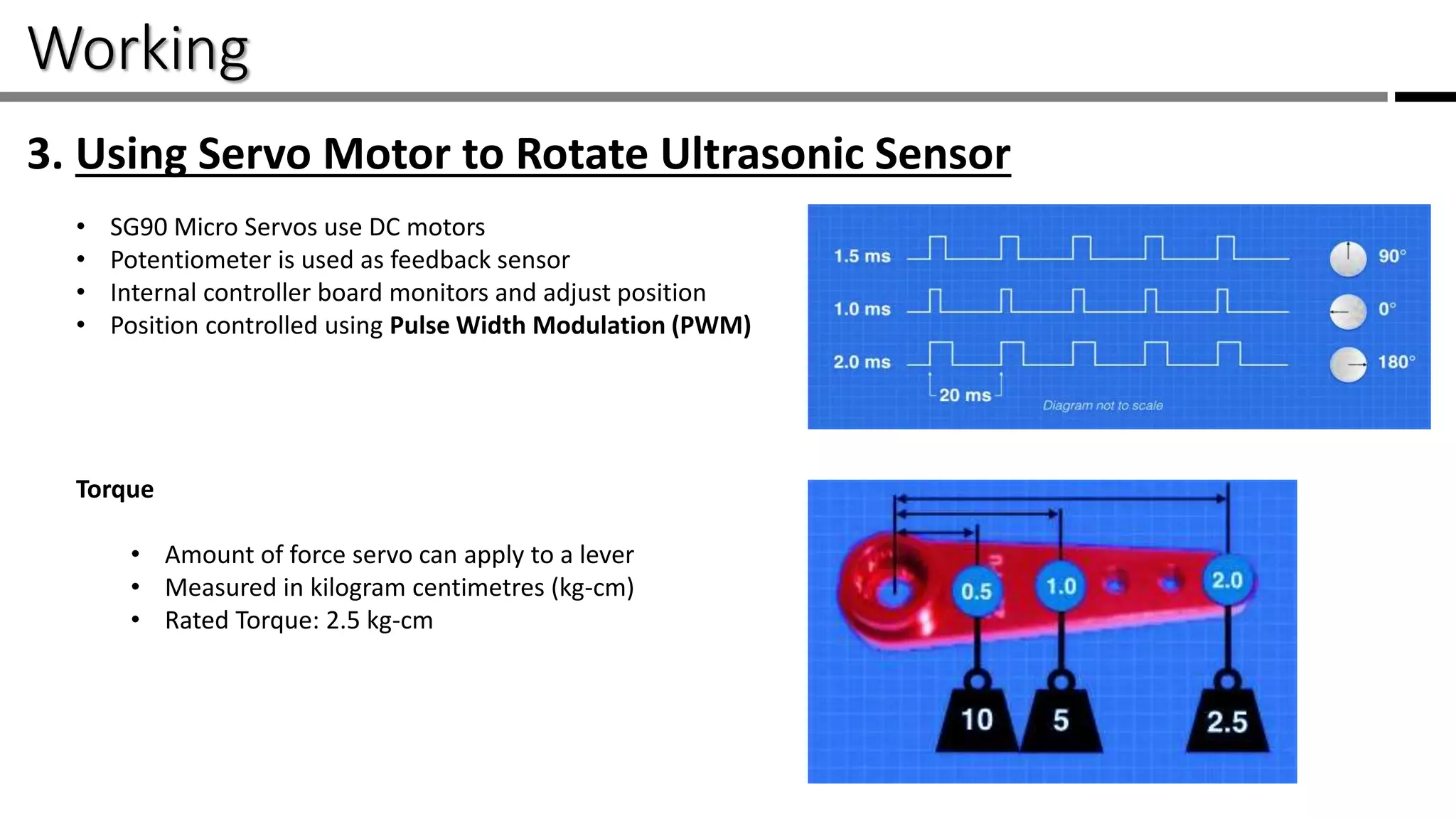
3. UsingServo Motor to Rotate Ultrasonic Sensor
• SG90 Micro Servos use DC motors
• Potentiometer is used as feedback sensor
• Internal controller board monitors and adjust position
• Position controlled using Pulse Width Modulation (PWM)
Torque
• Amount of force servo can apply to a lever
• Measured in kilogram centimetres (kg-cm)
• Rated Torque: 2.5 kg-cm
Scope /
Further Improvementsand Future Scope
1. Adding a Camera
• If interfaced with a camera, robot can be driven beyond line of sight
• Range becomes practically unlimited as network have a large range
2. Use as a fire fighter robot
• Addition of temperature sensor, water tank required
• Required some changes in programming
• It can work as an autonomous fire extinguisher
3. Obstacle detection for a Mining Vehicle
4. Driverless vehicles running along beams
5. Obstacle detecting system for a motor vehicle
6. Autonomous cleaning robot