Download as PDF, PPTX



![ There will be nearly 26 billion devices on the Internet of
Things by 2020.
[Gartner]
More than 30 billion devices will be wirelessly
connected to the Internet of Things by 2020
[ABI Research]
It's expected to be a 19 Trillion USD market
[John Chambers, Cisco CEO]
IoT Perspectives](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-14-320.jpg)
!["Basket of remotes" problem – we'll have hundreds of
applications to interface with hundreds of devices that
don't share protocols for speaking with one another
[Jean-Louis Gassée, Apple initial team, and BeOS co-founder]
Only IPv6 addresses are not enough – IoT devices
should be also easily and directly accessible for users
and [their] agents
In read/write mode
Preferably using a standard web browser
Even behind firewalls
IoT - Need for Standards](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-15-320.jpg)
![Common Sense: DDD
18
Main concepts:
Entities, value objects and modules
Aggregates and Aggregate Roots [Haywood]:
value < entity < aggregate < module < BC
Repositories, Factories and Services:
application services <-> domain services
Separating interface from implementation](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-18-320.jpg)
![Reactive Manifesto
22
[http://www.reactivemanifesto.org]](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-22-320.jpg)
![Reactive Programming
23
Microsoft®
opens source polyglot project ReactiveX
(Reactive Extensions) [http://reactivex.io]:
Rx = Observables + LINQ + Schedulers :)
Java: RxJava, JavaScript: RxJS, C#: Rx.NET, Scala: RxScala,
Clojure: RxClojure, C++: RxCpp, Ruby: Rx.rb, Python: RxPY,
Groovy: RxGroovy, JRuby: RxJRuby, Kotlin: RxKotlin ...
Reactive Streams Specification
[http://www.reactive-streams.org/] used by:
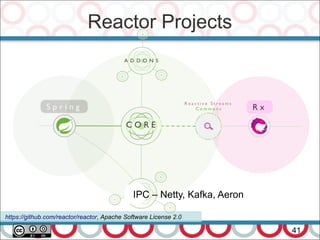
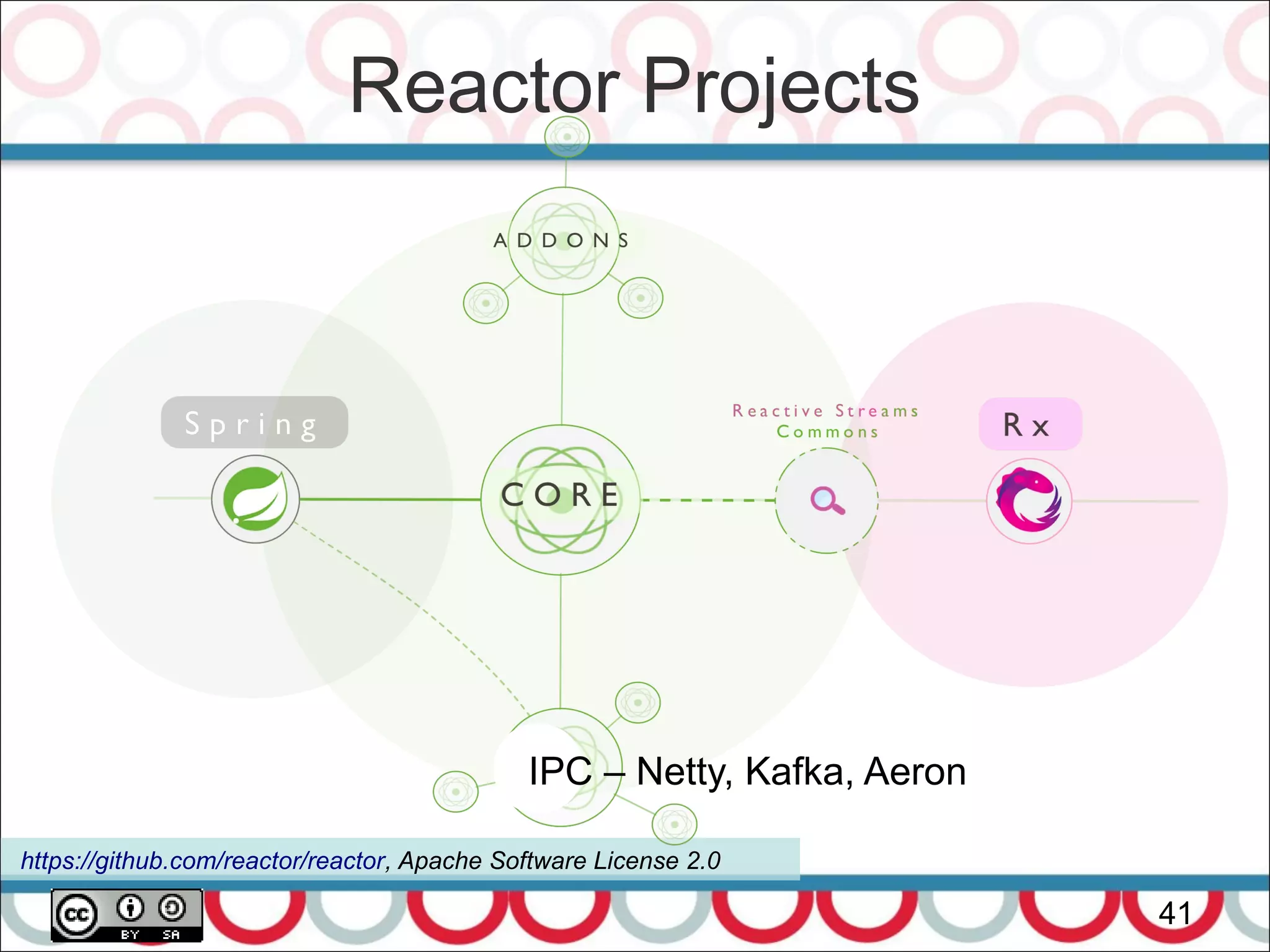
(Spring) Project Reactor [http://projectreactor.io/]
Actor Model – Akka (Java, Scala) [http://akka.io/]](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-23-320.jpg)

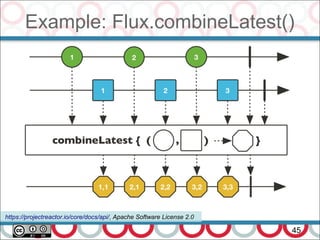
![FRP = Async Data Streams
27
FRP is asynchronous data-flow programming using the
building blocks of functional programming (e.g. map,
reduce, filter) and explicitly modeling time
Used for GUIs, robotics, and music. Example (RxJava):
Observable.from(
new String[]{"Reactive", "Extensions", "Java"})
.take(2).map(s -> s + " : on " + new Date())
.subscribe(s -> System.out.println(s));
Result:
Reactive : on Wed Jun 17 21:54:02 GMT+02:00 2015
Extensions : on Wed Jun 17 21:54:02 GMT+02:00 2015](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-27-320.jpg)
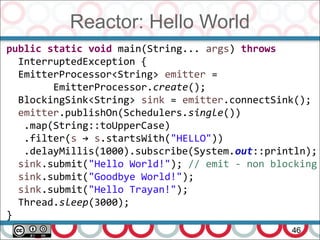
![28
Performance is about 2 things (Martin Thompson –
http://www.infoq.com/articles/low-latency-vp ):
– Throughput – units per second, and
– Latency – response time
Real-time – time constraint from input to response
regardless of system load.
Hard real-time system if this constraint is not honored then
a total system failure can occur.
Soft real-time system – low latency response with little
deviation in response time
100 nano-seconds to 100 milli-seconds. [Peter Lawrey]
What About High Performance?](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-28-320.jpg)
![34
Message Driven – asynchronous message-passing allows
to establish a boundary between components that ensures
loose coupling, isolation, location transparency, and
provides the means to delegate errors as messages
[Reactive Manifesto].
The main idea is to separate concurrent producer and
consumer workers by using message queues.
Message queues can be unbounded or bounded (limited
max number of messages)
Unbounded message queues can present memory
allocation problem in case the producers outrun the
consumers for a long period → OutOfMemoryError
Scalable, Massively Concurrent](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-31-320.jpg)
![35
Queues typically use either linked-lists or arrays for the
underlying storage of elements. Linked lists are not
„mechanically sympathetic” – there is no predictable
caching “stride” (should be less than 2048 bytes in each
direction).
Bounded queues often experience write contention on
head, tail, and size variables. Even if head and tail
separated using CAS, they usually are in the same cache-
line.
Queues produce much garbage.
Typical queues conflate a number of different concerns –
producer and consumer synchronization and data storage
Queues Disadvantages
[http://lmax-exchange.github.com/disruptor/files/Disruptor-1.0.pdf]](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-32-320.jpg)
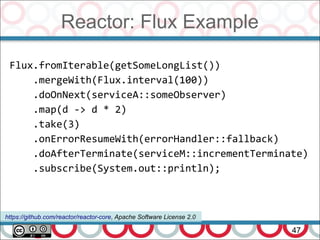
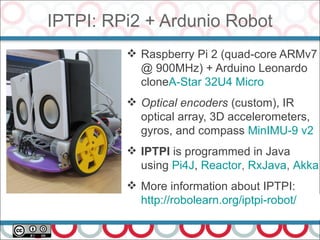
![36
LMAX Disruptor design pattern separates different
concerns in a “mechanically sympathetic” way:
- Storage of items being exchanged
- Producer coordination – claiming the next sequence
- Consumers coordination – notified new item is available
Single Writer principle is employed when writing data in
the Ring Buffer from single producer thread only (no
contention),
When multiple producers → CAS
Memory pre-allocated – predictable stride, no garbage
LMAX Disruptor (RingBuffer)
[http://lmax-exchange.github.com/disruptor/files/Disruptor-1.0.pdf]](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-33-320.jpg)
![37
LMAX Disruptor (RingBuffer) High Performance
[http://lmax-exchange.github.com/disruptor/files/Disruptor-
1.0.pdf]
Source: LMAX Disruptor github wiki - https://raw.githubusercontent.com/wiki/LMAX-
Exchange/disruptor/images/Models.png
LMAX-Exchange Disruptor License @ GitHub: Apache License Version 2.0, January 2004 -
http://www.apache.org/licenses/](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-34-320.jpg)
![38
LMAX Disruptor (RingBuffer) High Performance
[http://lmax-exchange.github.com/disruptor/files/Disruptor-
1.0.pdf]
Source: LMAX Disruptor @ GitHub - https://github.com/LMAX-
Exchange/disruptor/blob/master/docs/Disruptor.docx
LMAX-Exchange Disruptor License @ GitHub: Apache License Version 2.0, January 2004 -
http://www.apache.org/licenses/](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-35-320.jpg)

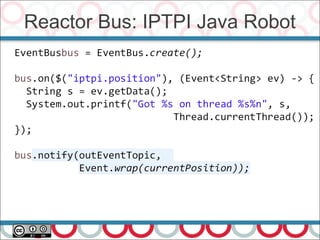
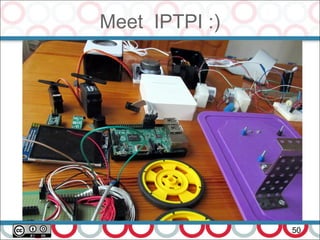



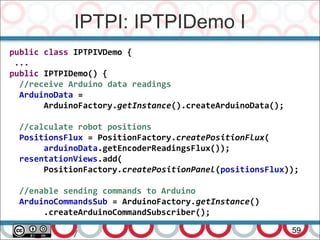
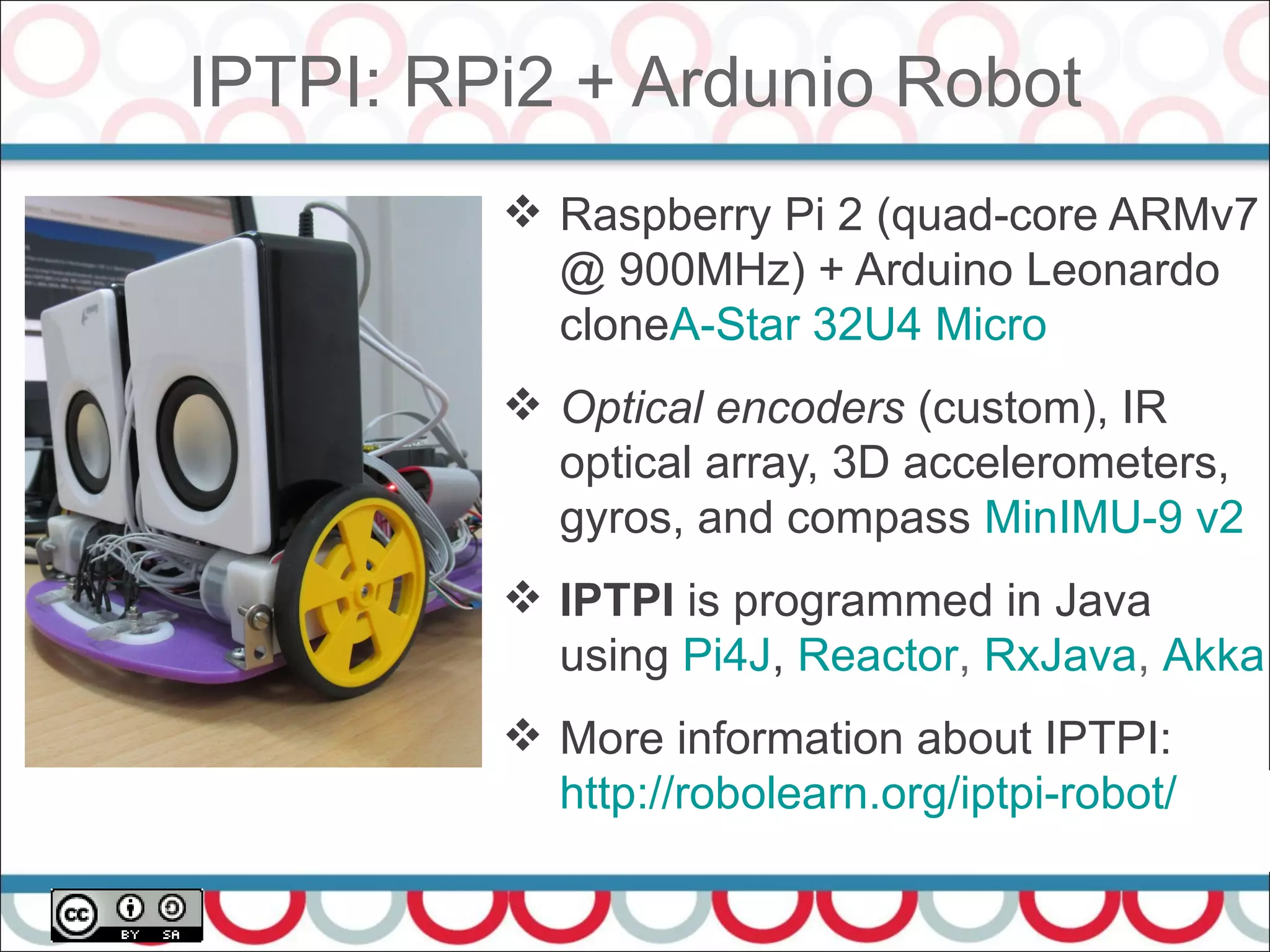
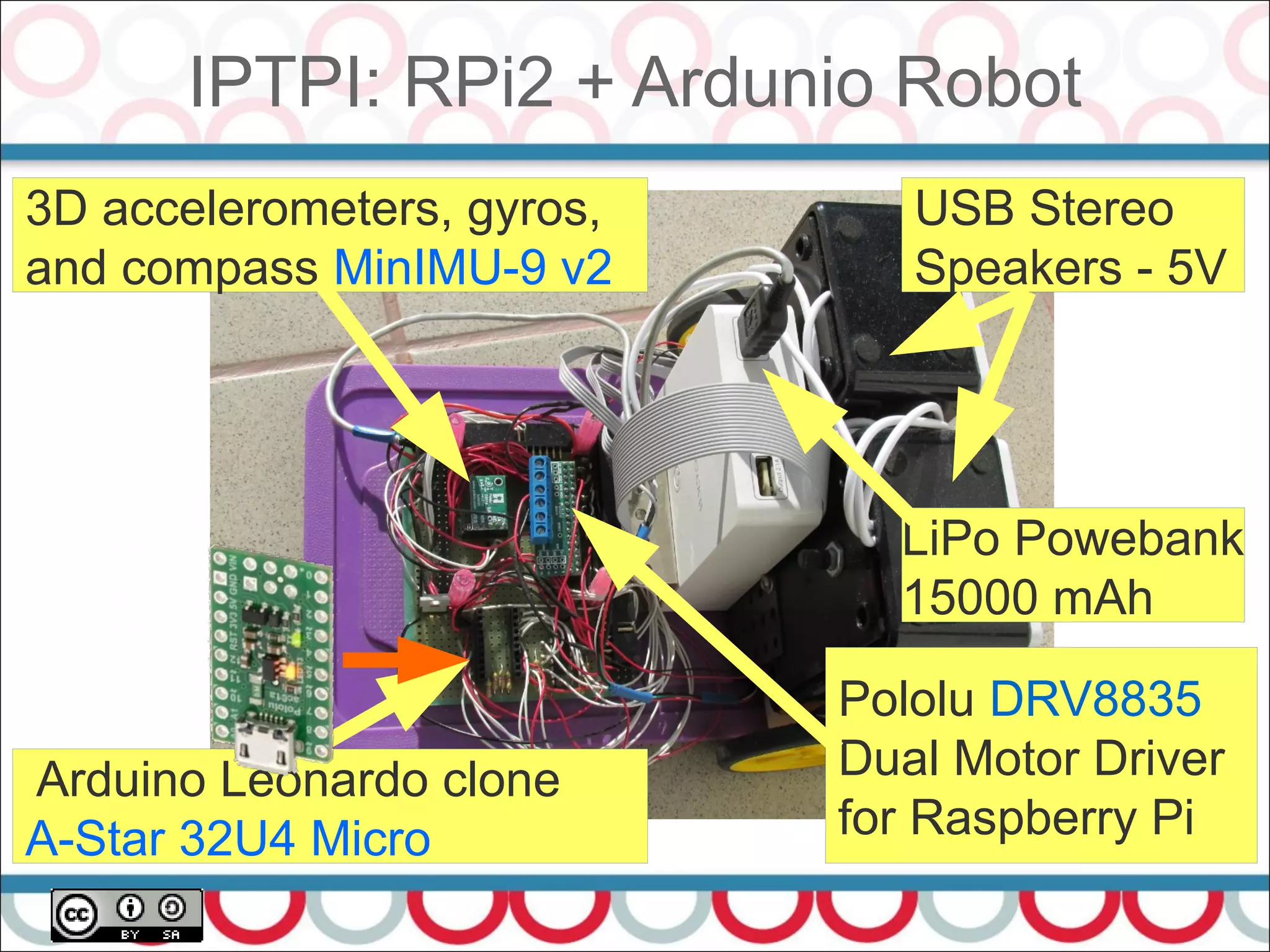
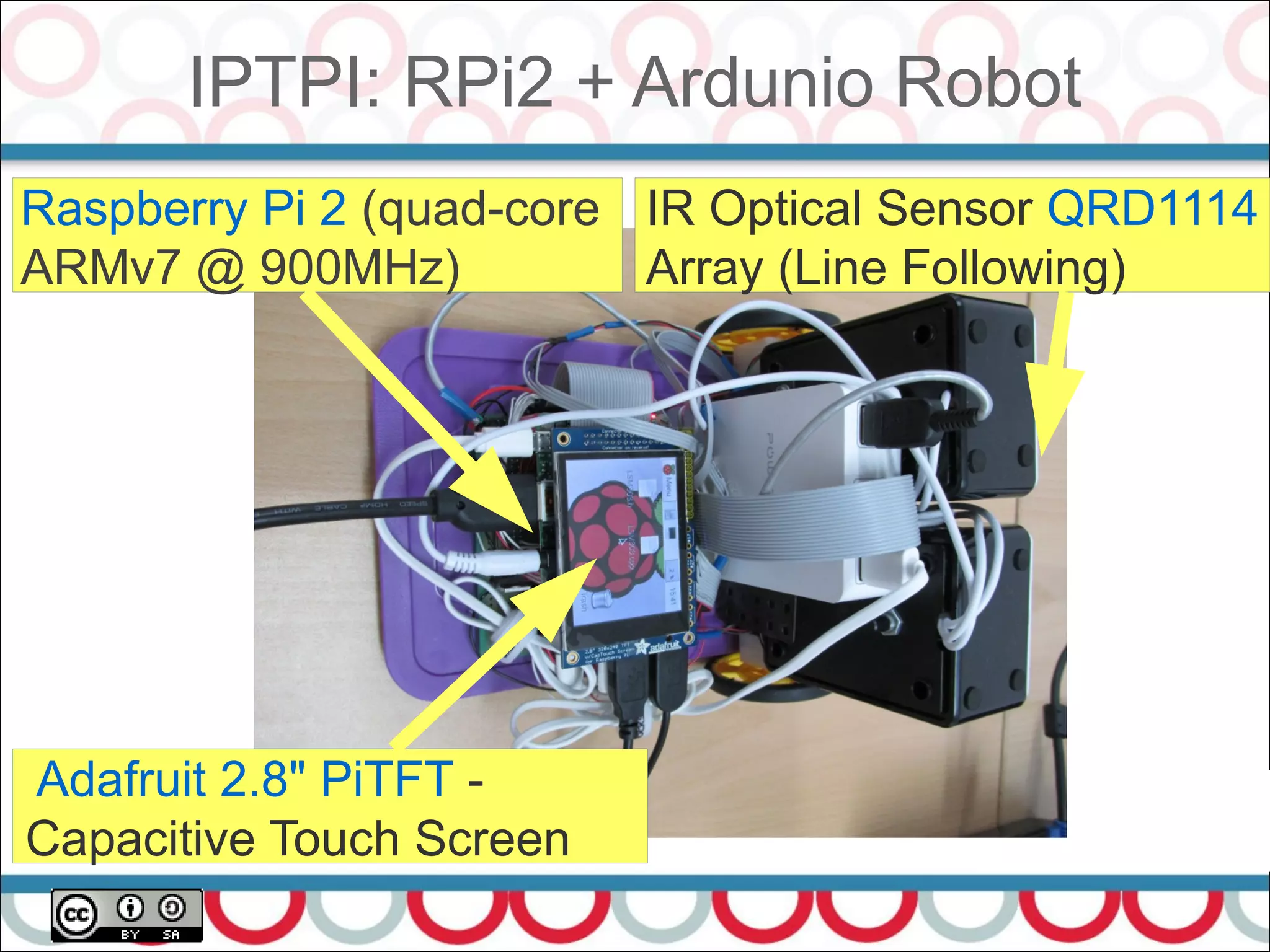
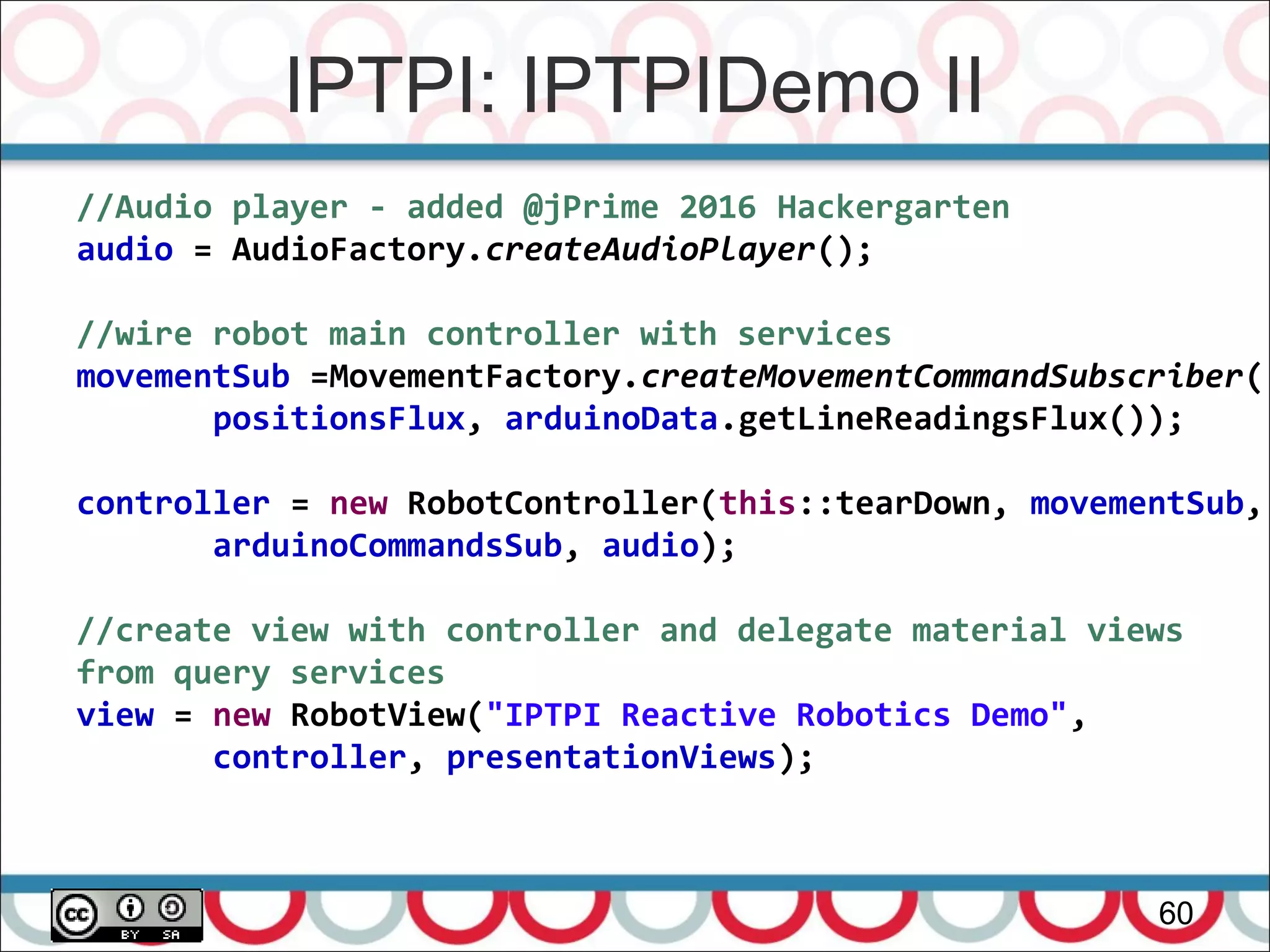
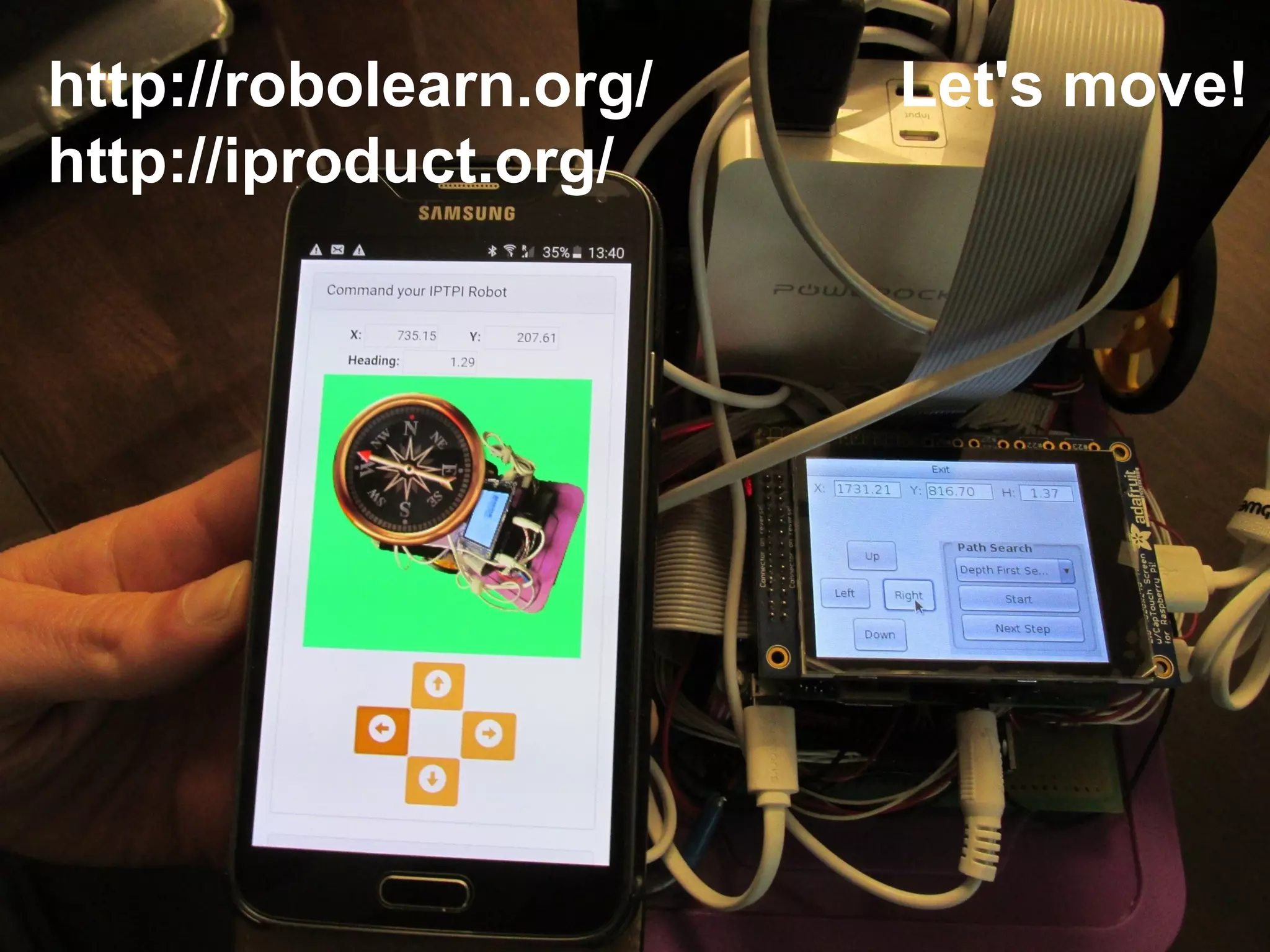
![IPTPI: IPTPIDemo III
61
//expose as WS service
movementSub2 =MovementFactory.createMovementCommandSubscriber(
positionsFlux, arduinoData.getLineReadingsFlux());
positionsService = new RobotWSService(
positionsFlux, movementSub2);
}
public static void main(String[] args) {
// initialize wiringPi library
Gpio.wiringPiSetupGpio();
try {
IPTPIDemo demo = new IPTPIDemo();
} catch (IOException e) {
e.printStackTrace();
}
}](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/85/Reactive-Java-Robotics-IoT-with-Spring-Reactor-58-320.jpg)





![ There will be nearly 26 billion devices on the Internet of
Things by 2020.
[Gartner]
More than 30 billion devices will be wirelessly
connected to the Internet of Things by 2020
[ABI Research]
It's expected to be a 19 Trillion USD market
[John Chambers, Cisco CEO]
IoT Perspectives](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-14-2048.jpg)
!["Basket of remotes" problem – we'll have hundreds of
applications to interface with hundreds of devices that
don't share protocols for speaking with one another
[Jean-Louis Gassée, Apple initial team, and BeOS co-founder]
Only IPv6 addresses are not enough – IoT devices
should be also easily and directly accessible for users
and [their] agents
In read/write mode
Preferably using a standard web browser
Even behind firewalls
IoT - Need for Standards](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-15-2048.jpg)
![Common Sense: DDD
18
Main concepts:
Entities, value objects and modules
Aggregates and Aggregate Roots [Haywood]:
value < entity < aggregate < module < BC
Repositories, Factories and Services:
application services <-> domain services
Separating interface from implementation](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-18-2048.jpg)
![Reactive Manifesto
22
[http://www.reactivemanifesto.org]](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-22-2048.jpg)
![Reactive Programming
23
Microsoft®
opens source polyglot project ReactiveX
(Reactive Extensions) [http://reactivex.io]:
Rx = Observables + LINQ + Schedulers :)
Java: RxJava, JavaScript: RxJS, C#: Rx.NET, Scala: RxScala,
Clojure: RxClojure, C++: RxCpp, Ruby: Rx.rb, Python: RxPY,
Groovy: RxGroovy, JRuby: RxJRuby, Kotlin: RxKotlin ...
Reactive Streams Specification
[http://www.reactive-streams.org/] used by:
(Spring) Project Reactor [http://projectreactor.io/]
Actor Model – Akka (Java, Scala) [http://akka.io/]](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-23-2048.jpg)
![FRP = Async Data Streams
27
FRP is asynchronous data-flow programming using the
building blocks of functional programming (e.g. map,
reduce, filter) and explicitly modeling time
Used for GUIs, robotics, and music. Example (RxJava):
Observable.from(
new String[]{"Reactive", "Extensions", "Java"})
.take(2).map(s -> s + " : on " + new Date())
.subscribe(s -> System.out.println(s));
Result:
Reactive : on Wed Jun 17 21:54:02 GMT+02:00 2015
Extensions : on Wed Jun 17 21:54:02 GMT+02:00 2015](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-27-2048.jpg)
![28
Performance is about 2 things (Martin Thompson –
http://www.infoq.com/articles/low-latency-vp ):
– Throughput – units per second, and
– Latency – response time
Real-time – time constraint from input to response
regardless of system load.
Hard real-time system if this constraint is not honored then
a total system failure can occur.
Soft real-time system – low latency response with little
deviation in response time
100 nano-seconds to 100 milli-seconds. [Peter Lawrey]
What About High Performance?](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-28-2048.jpg)
![34
Message Driven – asynchronous message-passing allows
to establish a boundary between components that ensures
loose coupling, isolation, location transparency, and
provides the means to delegate errors as messages
[Reactive Manifesto].
The main idea is to separate concurrent producer and
consumer workers by using message queues.
Message queues can be unbounded or bounded (limited
max number of messages)
Unbounded message queues can present memory
allocation problem in case the producers outrun the
consumers for a long period → OutOfMemoryError
Scalable, Massively Concurrent](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-31-2048.jpg)
![35
Queues typically use either linked-lists or arrays for the
underlying storage of elements. Linked lists are not
„mechanically sympathetic” – there is no predictable
caching “stride” (should be less than 2048 bytes in each
direction).
Bounded queues often experience write contention on
head, tail, and size variables. Even if head and tail
separated using CAS, they usually are in the same cache-
line.
Queues produce much garbage.
Typical queues conflate a number of different concerns –
producer and consumer synchronization and data storage
Queues Disadvantages
[http://lmax-exchange.github.com/disruptor/files/Disruptor-1.0.pdf]](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-32-2048.jpg)
![36
LMAX Disruptor design pattern separates different
concerns in a “mechanically sympathetic” way:
- Storage of items being exchanged
- Producer coordination – claiming the next sequence
- Consumers coordination – notified new item is available
Single Writer principle is employed when writing data in
the Ring Buffer from single producer thread only (no
contention),
When multiple producers → CAS
Memory pre-allocated – predictable stride, no garbage
LMAX Disruptor (RingBuffer)
[http://lmax-exchange.github.com/disruptor/files/Disruptor-1.0.pdf]](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-33-2048.jpg)
![37
LMAX Disruptor (RingBuffer) High Performance
[http://lmax-exchange.github.com/disruptor/files/Disruptor-
1.0.pdf]
Source: LMAX Disruptor github wiki - https://raw.githubusercontent.com/wiki/LMAX-
Exchange/disruptor/images/Models.png
LMAX-Exchange Disruptor License @ GitHub: Apache License Version 2.0, January 2004 -
http://www.apache.org/licenses/](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-34-2048.jpg)
![38
LMAX Disruptor (RingBuffer) High Performance
[http://lmax-exchange.github.com/disruptor/files/Disruptor-
1.0.pdf]
Source: LMAX Disruptor @ GitHub - https://github.com/LMAX-
Exchange/disruptor/blob/master/docs/Disruptor.docx
LMAX-Exchange Disruptor License @ GitHub: Apache License Version 2.0, January 2004 -
http://www.apache.org/licenses/](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-35-2048.jpg)

![IPTPI: IPTPIDemo III
61
//expose as WS service
movementSub2 =MovementFactory.createMovementCommandSubscriber(
positionsFlux, arduinoData.getLineReadingsFlux());
positionsService = new RobotWSService(
positionsFlux, movementSub2);
}
public static void main(String[] args) {
// initialize wiringPi library
Gpio.wiringPiSetupGpio();
try {
IPTPIDemo demo = new IPTPIDemo();
} catch (IOException e) {
e.printStackTrace();
}
}](https://image.slidesharecdn.com/reactiveroboticsiot2017withreactor-170406154830/75/Reactive-Java-Robotics-IoT-with-Spring-Reactor-58-2048.jpg)

This document discusses reactive programming and its application in Java robotics and IoT, highlighting the use of Spring Reactor and related technologies. It emphasizes the need for high-performance non-blocking applications and introduces the concept of reactive streams as a solution to manage complexity in these domains. Additionally, it covers various programming paradigms, performance considerations, and tools like the LMAX Disruptor and Project Reactor that enhance reactive system design.





















![[DevDay2019] Hands-on Machine Learning on Google Cloud Platform - By Thanh Le...](https://cdn.slidesharecdn.com/ss_thumbnails/mltfgcpthanhleedit-190410074403-thumbnail.jpg?width=600ounds&width=560&fit=bounds)

![Leveraging the Open IoT Ecosystem to Accelerate Innovation [BizofIoT]](https://cdn.slidesharecdn.com/ss_thumbnails/leveragingtheopeniotecosystemtoacceleratethingmonkbiot-141204090438-conversion-gate01-thumbnail.jpg?width=600ounds&width=560&fit=bounds)























































