Kongsberg Maritime
K-Pos
Sensors and Sensor input management
© KONGSBERG
Kongsberg Maritime
Sensors on Corcovado
DP Main: DP OS 1 & 2 and TC OS5
• 3 x Gyros
• 3 x Wind sensors
• 3 x VRS
• 1 x Speed (GPS speed from NAV GPS)
• 4 x Draught
© KONGSBERG
1
� Kongsberg Maritime
Sensors on Corcovado
DP Backup: DP OS 4
• 1 x Gyro (Gyro-3)
• 1 x Wind sensor (Wind-3)
• 1 x VRS (VRS-3)
• 4 x Draught
© KONGSBERG
Kongsberg Maritime
Sensors on Corcovado
iJoy:
• 1 x Gyro (Gyro-1)
• 1 x Wind sensor (Wind-1)
© KONGSBERG
2
� Kongsberg Maritime
Main sensors
© KONGSBERG
Kongsberg Maritime
Heading Sensors – For automatic heading control
• 3 x C.Plath Navigat X gyrocompass
• All enabled - One Preference
• Sensor failures
• Voting
C. Plath gyrocompass
Navigat X
© KONGSBERG
3
� Kongsberg Maritime
Heading Sensors – For position calculation
• Conversion from • Position calculation
antenna position for relative PRS:
to vessel’s centre:
Antenna
position
Vessel
position
© KONGSBERG
Kongsberg Maritime
Heading sensors – Alarms and messages
• Gyro difference
• Gyro x rejected
• Gyro x prediction error
• Heading dropout
• Gyro x not ready
• Gyro not enabled
• Heading monitor requires 2nd source
• Heading out of limits
© KONGSBERG
4
� Kongsberg Maritime
Vertical Reference Sensors - VRS
• Measuring Pitch, Roll (and Heave)
• 3 x Kongsberg Seatex MRU 5
• All enabled - One Preference
• Sensor failures
• Voting
MRU-5
© KONGSBERG
Kongsberg Maritime
VRS Purpose: Pitch & Roll compensation
Position
measured by Vessel centre
GPS position
© KONGSBERG
5
� Kongsberg Maritime
VRS – Alarms and messages
• VRS difference
• VRS x rejected
• VRS x prediction error
• VRS x not ready
• VRS not enabled
© KONGSBERG
Kongsberg Maritime
Heading, Pitch & Roll – Input to HiPAP
• Conversion to vessel’s centre
is made by HiPAP system
before position is sent to DP
• Gyro & VRS used by HiPAP is
independent of Preference-
sensors used by DP
Heading Input
Pitch & Roll
Input
© KONGSBERG
6
� Kongsberg Maritime
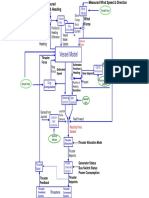
Wind sensors
• Wind Feed-Forward
© KONGSBERG
Measured Measured Wind Speed & Direction
Position & Heading Wind Draught Input
Model
Error
Kalman Comp. Wind
Filter
Error
force Force
Position & Computation
Heading Current
Predicted Vessel
Difference
Position & Model External
Heading Update Forces
Thruster
Vessel Model
Force
Estimated Speed Settings
Drag Position & Carrot
Estimated
Force Speed Heading New Setpoint Computation
Position & Heading
Draught Input Drag Position & Present Setpoint
Computation Heading
Deviation
Damping Gain Selected
Control Control Gain
Demand from Joystick
Joystick Force
Joystick
Demand Feed Forward
Gain
Controller
Resulting Force
Demand
Joystick
Settings Thruster
Allocation Thruster Allocation Mode
Thruster
Setpoints
Thruster Power Generator Status
Overload Bus Switch Status
Model
Control
Power Consumption
Thruster Thruster
Feedback Setpoints
Thruster Thruster
Feedback Thrusters Command
System System
7
� Kongsberg Maritime
Wind sensors
• Wind Feed-Forward
• 1 x Gill WindObserver II (Wind 2)
• 2 x OMC 160 (Wind 1 & 3)
• Consider how many enabled
• Sensor failures, wind shadows,
false wind
• No Voting
Gill WindObserver II Observator Instruments BV, OMC 160
Ultra sonic sensor Mechanical sensor
© KONGSBERG
Kongsberg Maritime
Wind sensors – location on the vessel
• Preference the sensor in the best location –
according to the wind direction
© KONGSBERG
8
� Kongsberg Maritime
Wind sensor - wind shadow
© KONGSBERG
Kongsberg Maritime
Wind sensor – exposed for wind
WIND
WINDSENSOR WIND
EXPOSED
FORCE OF WIND
EXAGGERATED
AT WINDSENSOR
VESSEL HULL AND STRUCTURE
PLATFORM
SUPERSTRUCTURE
IN WINDSHADOW
WINDSENSOR EXPOSED
TO FULL FORCE OF WIND
VESSEL IN LEE OF
PLATFORM
EVERY GUST CAUSES
VESSEL TO DRIVE
TOWARD PLATFORM
AND LOSE HEADING
VESSEL
EXCURSION
© KONGSBERG
9
� Kongsberg Maritime
Wind sensor – false wind – helicopter
DOWNDRAFT FROM HELICOPTER
ROTOR BLADES MAY CAUSE
WINDSENSOR TO INPUT FALSE
HIGH VALUES THUS DESTABILISING
THE DP CAPABILITY
© KONGSBERG
Kongsberg Maritime
Wind sensor – false wind – platform exhaust
WINDSENSOR PROBLEM - PLATFORM EXHAUST
PLATFORM
GENERATOR
EXHAUST
WINDSENSOR
GENERATOR START CAUSES
LOCALISED "GALE" AT THE
WINDSENSOR.
VESSEL REACTS WITH A
VIOLENT DRIVE TOWARD
THE PLATFORM
© KONGSBERG
10
� Kongsberg Maritime
Wind – Alarms and messages
• Wind difference
• Wind x sensor rejected (not because of voting)
• Wind x not ready
• Wind not enabled
© KONGSBERG
Kongsberg Maritime
© KONGSBERG
11
� Kongsberg Maritime
Draught sensors on Corcovado
• 4 x Draught sensors
• Select either: Sensor, Operational, Transit or Manual
• When Sensor is selected: Average between sensors
enabled are used to calculate Used Draught
• Clip limits Corcovado: Max limit: 14.4m, Min limit: 6.8
• Purpose:
Measured Wind Speed & Direction
Wind Draught Input
Model
Wind
Force
External
Forces
Vessel Model
Drag
Estimated
Force Speed
Draught Input Drag
Computation
© KONGSBERG
Kongsberg Maritime
Draught – Alarms and messages
• Draught limit reached
• Draught x sensor rejected (not because of voting)
• Draught x not ready
• Draught not enabled
© KONGSBERG
12
� Kongsberg Maritime
Speed Sensors on Corcovado
• 1 x GPS Speed (NAV GPS)
• Manual Speed can be selected
• Only used in Auto Pilot mode
• Purpose: To improve Vessel Model in higher speeds
© KONGSBERG
Kongsberg Maritime
Speed – Alarms and messages
• Speed GPS x high noise
• Speed GPS x prediction error
• Speed x not ready
• Speed sensor dropout
© KONGSBERG
13
� Kongsberg Maritime
Summary
• Main sensors fitted on all DP vessels
• Gyro
• VRS
• Wind
• Other sensors fitted on Corcovado
• Draught
• Speed
• Purpose & Sensor input management
• Alarms and messages associated with sensors
© KONGSBERG
14