0% found this document useful (0 votes)
89 views7 pagesMPI Lab 10
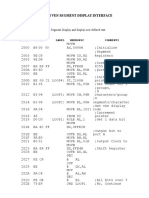
This document describes a program to control a virtual traffic light system using an 8086 microprocessor. The traffic light system has 12 LEDs and can be controlled by writing different control words to port address 4. The control word format and some example control words are provided. The document also provides instructions on using the OUT instruction to load control words and the INT 15h BIOS wait function to add delays between control words. An example ALP is provided to initialize the traffic lights, output different control words with delays, and loop continuously.
Uploaded by
dihosid99Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
89 views7 pagesMPI Lab 10
This document describes a program to control a virtual traffic light system using an 8086 microprocessor. The traffic light system has 12 LEDs and can be controlled by writing different control words to port address 4. The control word format and some example control words are provided. The document also provides instructions on using the OUT instruction to load control words and the INT 15h BIOS wait function to add delays between control words. An example ALP is provided to initialize the traffic lights, output different control words with delays, and loop continuously.
Uploaded by
dihosid99Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 7