0% found this document useful (0 votes)
25 views22 pagesLecture 5 Lecture 2 Signal and Systems
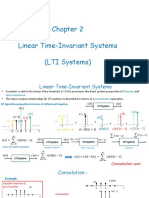
This document discusses representation of continuous-time signals using the Dirac delta function and convolution integral. It defines the convolution integral and shows how it can be used to represent the output of linear time-invariant systems. It also discusses properties of the convolution integral like commutativity, associativity, distributivity, and how these relate to properties of LTI systems.
Uploaded by
mmozkaynakkCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
25 views22 pagesLecture 5 Lecture 2 Signal and Systems
This document discusses representation of continuous-time signals using the Dirac delta function and convolution integral. It defines the convolution integral and shows how it can be used to represent the output of linear time-invariant systems. It also discusses properties of the convolution integral like commutativity, associativity, distributivity, and how these relate to properties of LTI systems.
Uploaded by
mmozkaynakkCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 22