0% found this document useful (0 votes)
9 views5 pagesSolution Week 7
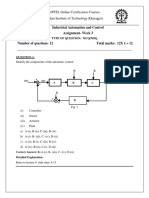
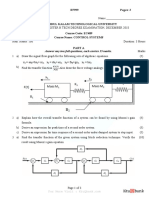
The document contains solutions to various assignments related to Control Engineering, covering topics such as derivative control, transfer functions, peak time calculations, and steady-state error analysis. It includes mathematical derivations and comparisons with standard forms to determine parameters like damping ratio and natural frequency. The solutions also emphasize the importance of careful application of derivative control to avoid instability.
Uploaded by
Poorani PushparajCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
9 views5 pagesSolution Week 7
The document contains solutions to various assignments related to Control Engineering, covering topics such as derivative control, transfer functions, peak time calculations, and steady-state error analysis. It includes mathematical derivations and comparisons with standard forms to determine parameters like damping ratio and natural frequency. The solutions also emphasize the importance of careful application of derivative control to avoid instability.
Uploaded by
Poorani PushparajCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 5