0% found this document useful (0 votes)
72 views10 pagesBalanced Tree
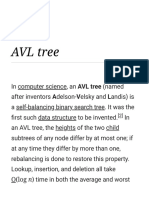
Unit 8 covers balanced trees, focusing on AVL trees and weight-balanced trees, explaining their structures and operations. It emphasizes the importance of maintaining balance in binary search trees to ensure efficient operations with O(log n) time complexity. The unit also details the insertion and deletion processes in AVL trees, including the necessary rotations to maintain balance.
Uploaded by
JINESH VARIACopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
72 views10 pagesBalanced Tree
Unit 8 covers balanced trees, focusing on AVL trees and weight-balanced trees, explaining their structures and operations. It emphasizes the importance of maintaining balance in binary search trees to ensure efficient operations with O(log n) time complexity. The unit also details the insertion and deletion processes in AVL trees, including the necessary rotations to maintain balance.
Uploaded by
JINESH VARIACopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
/ 10