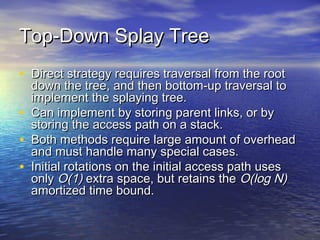
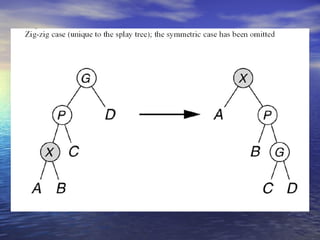
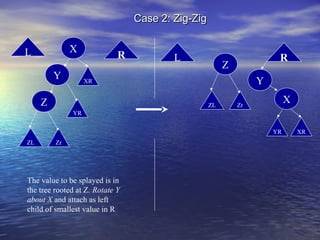
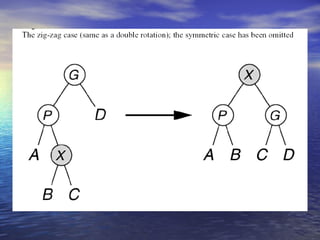
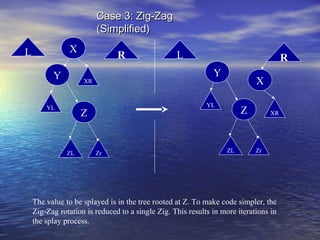
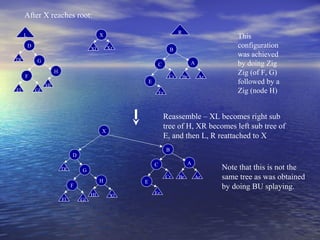
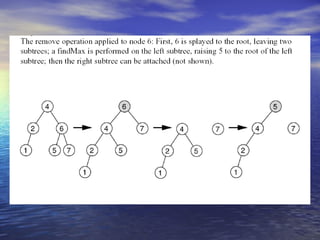
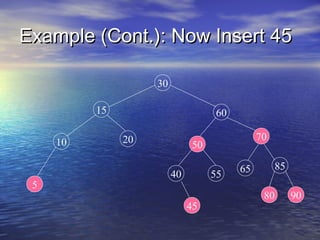
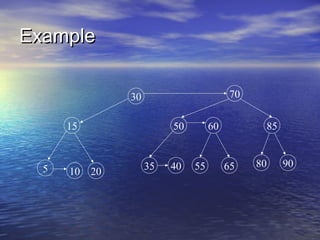
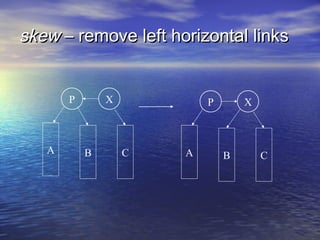
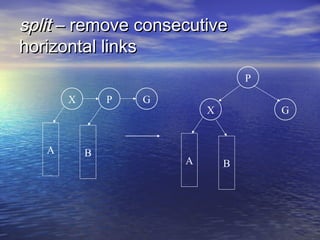
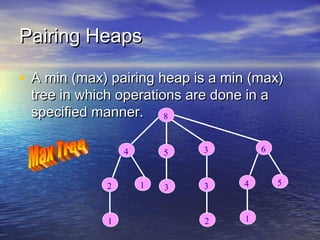
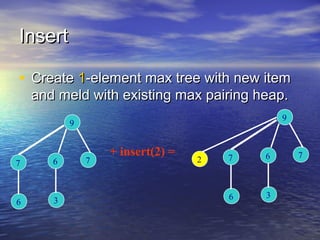
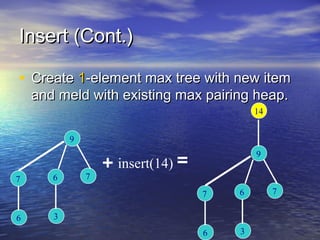
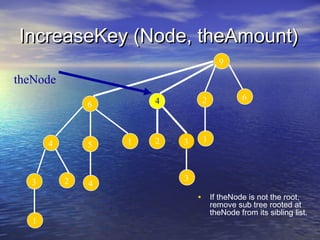
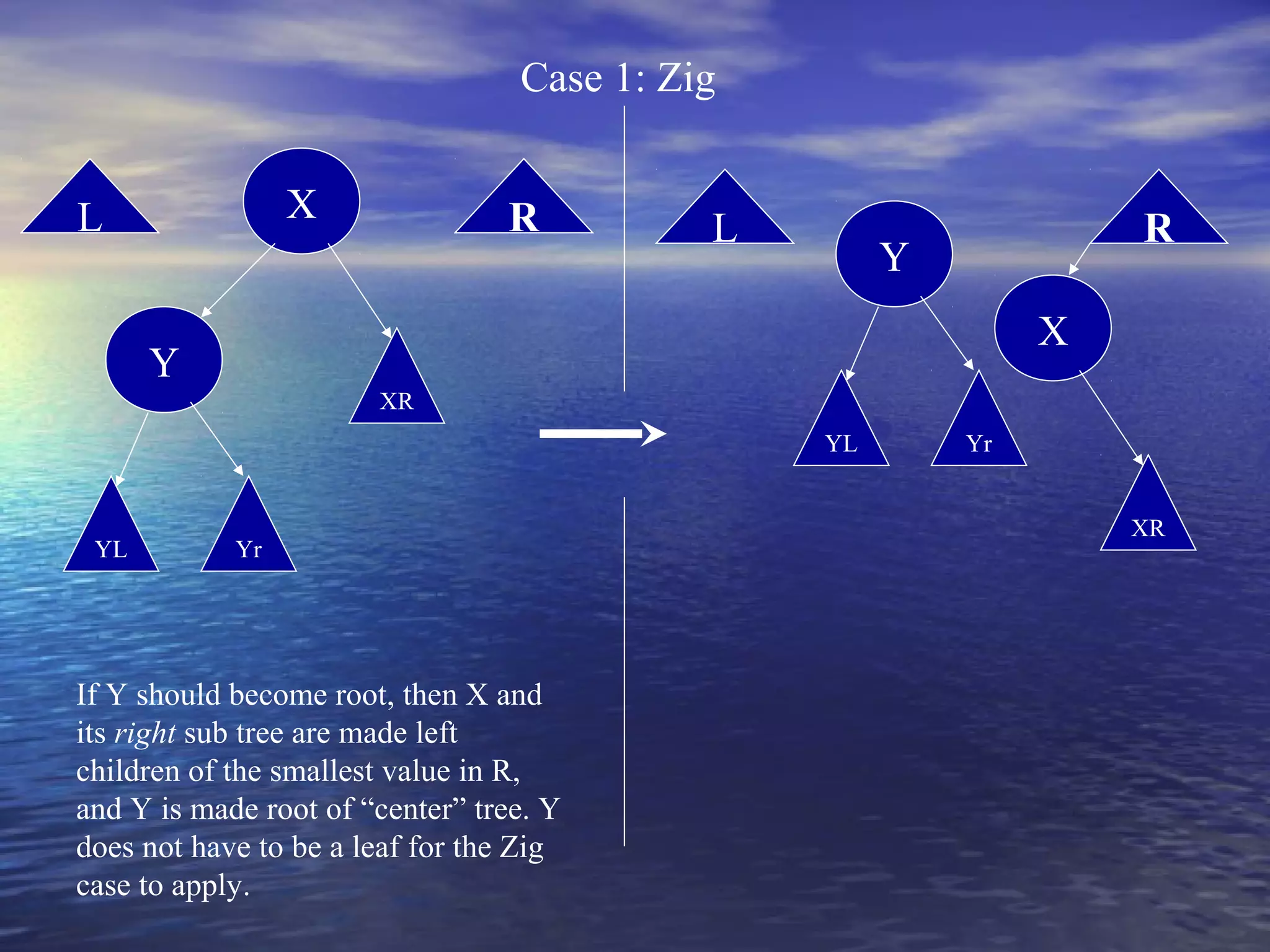
This document provides an overview of several advanced data structures and their implementations, including: top-down splay trees, red-black trees, top-down red-black trees, deterministic skip lists, AA-trees, treaps, k-d trees, and pairing heaps. For each data structure, key properties and implementation techniques are summarized, such as rotation types for splay trees, balancing rules and operations for red-black trees, and insertion and search processes for skip lists. Code implementations are referenced for several of the data structures.