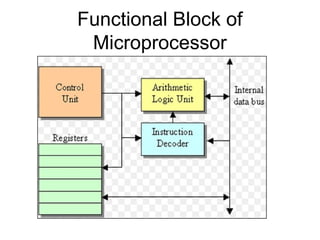
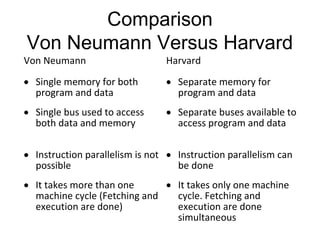
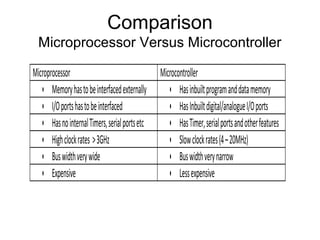
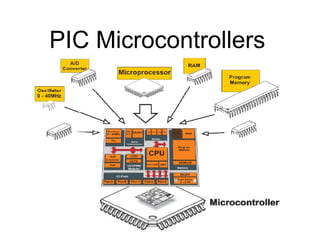
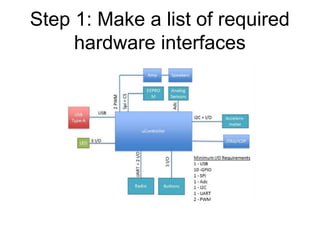
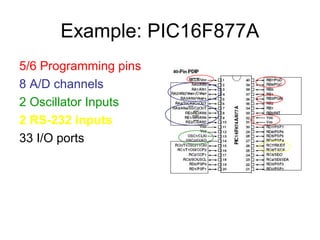
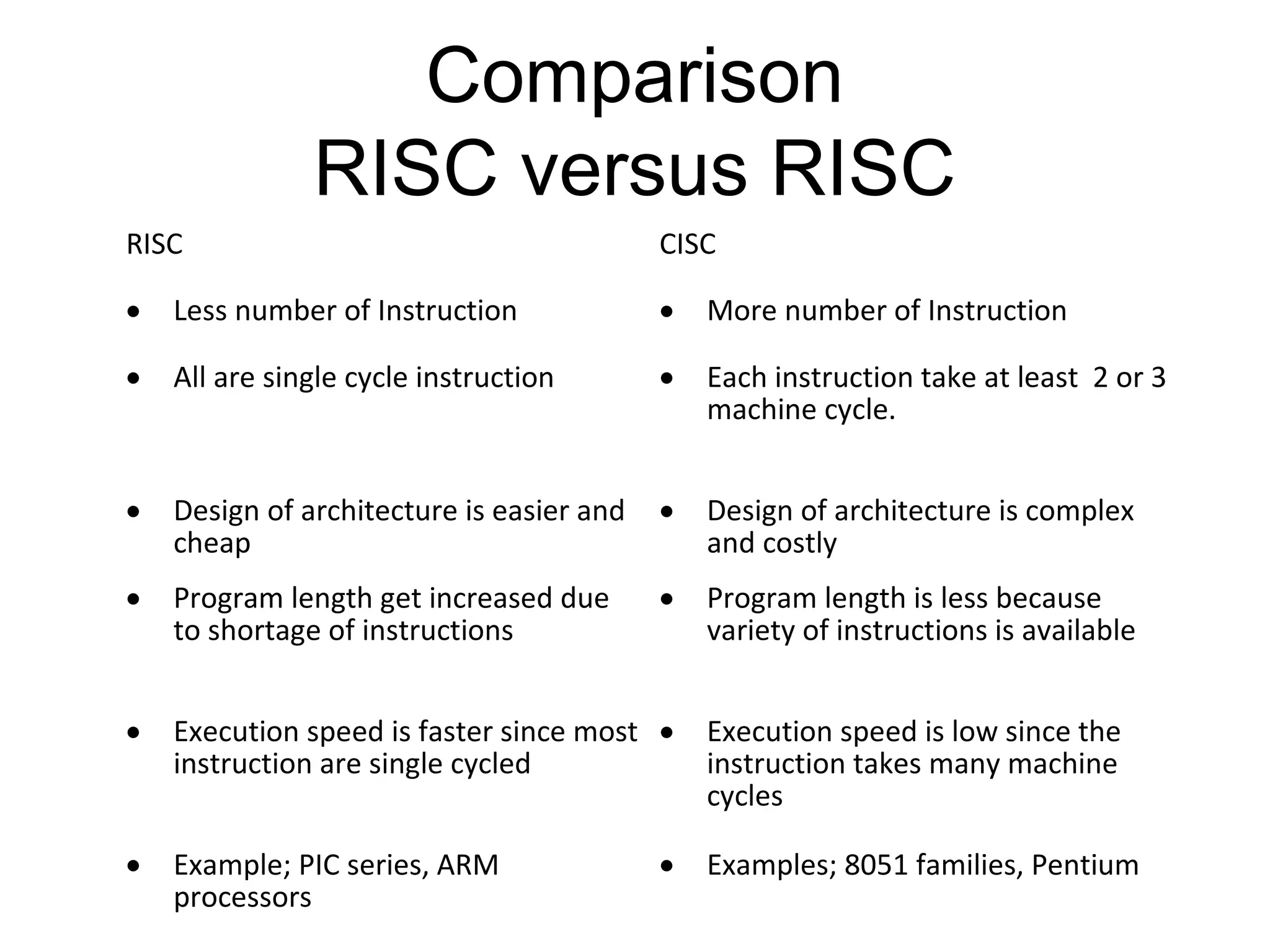
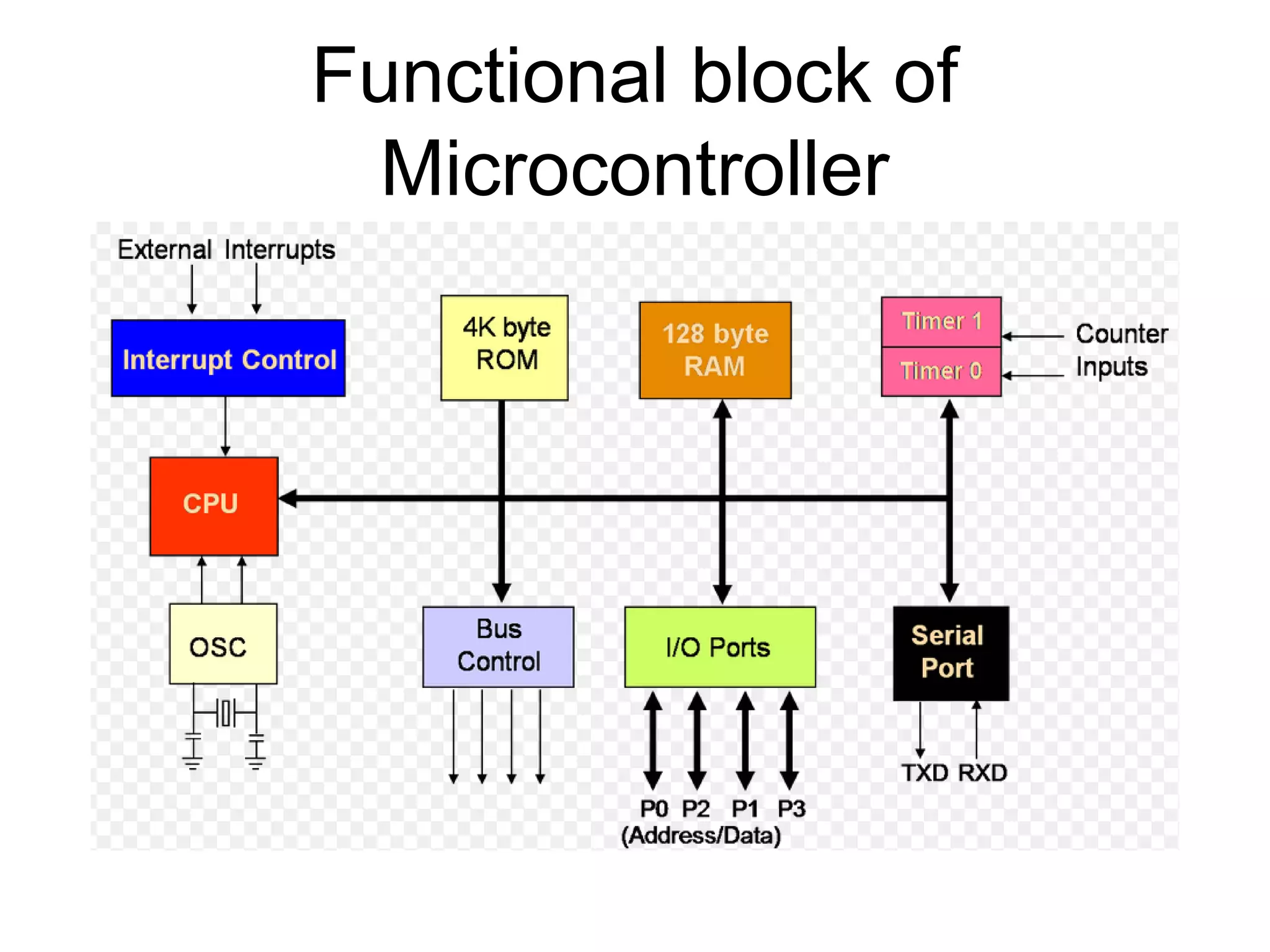
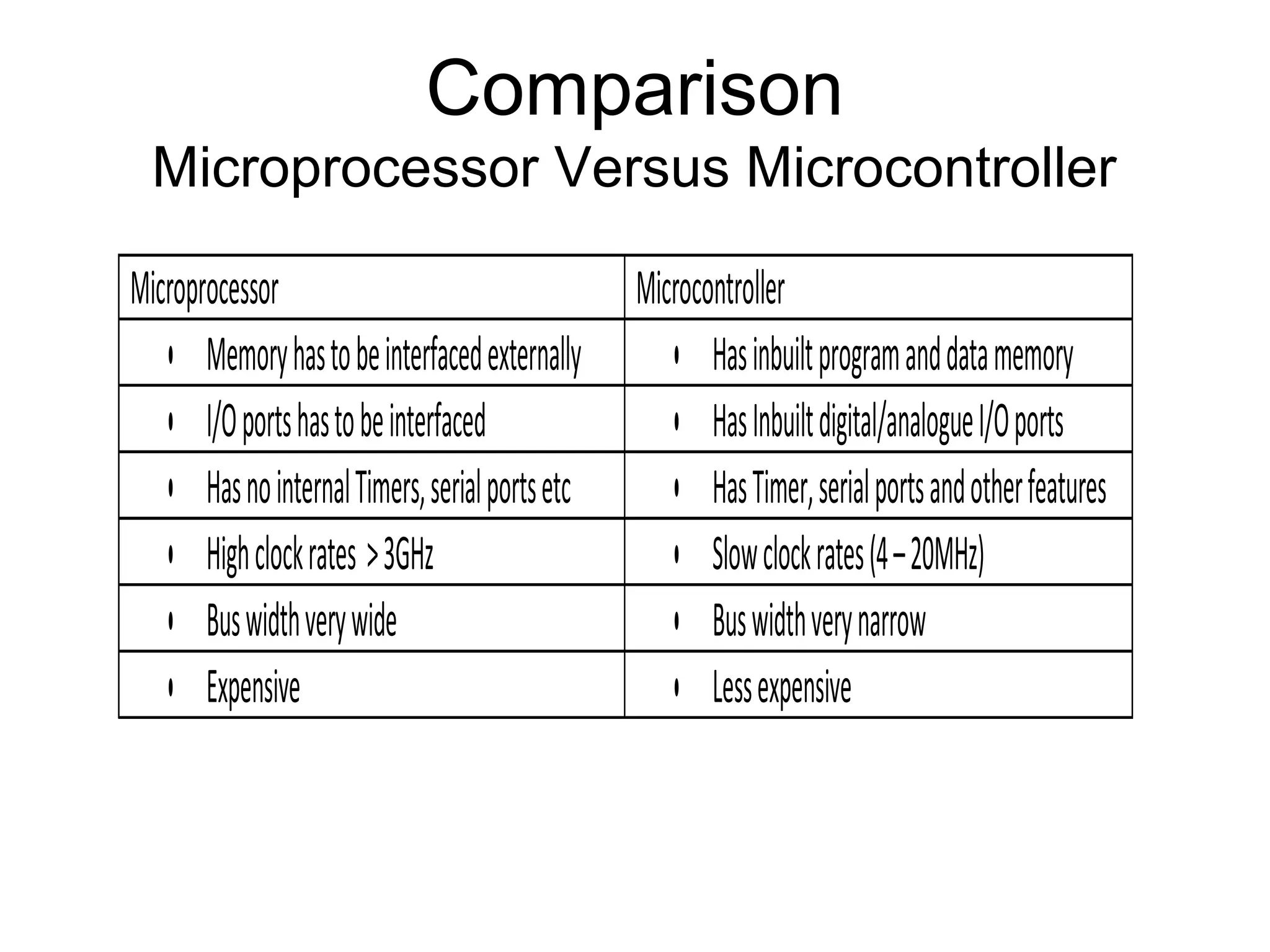
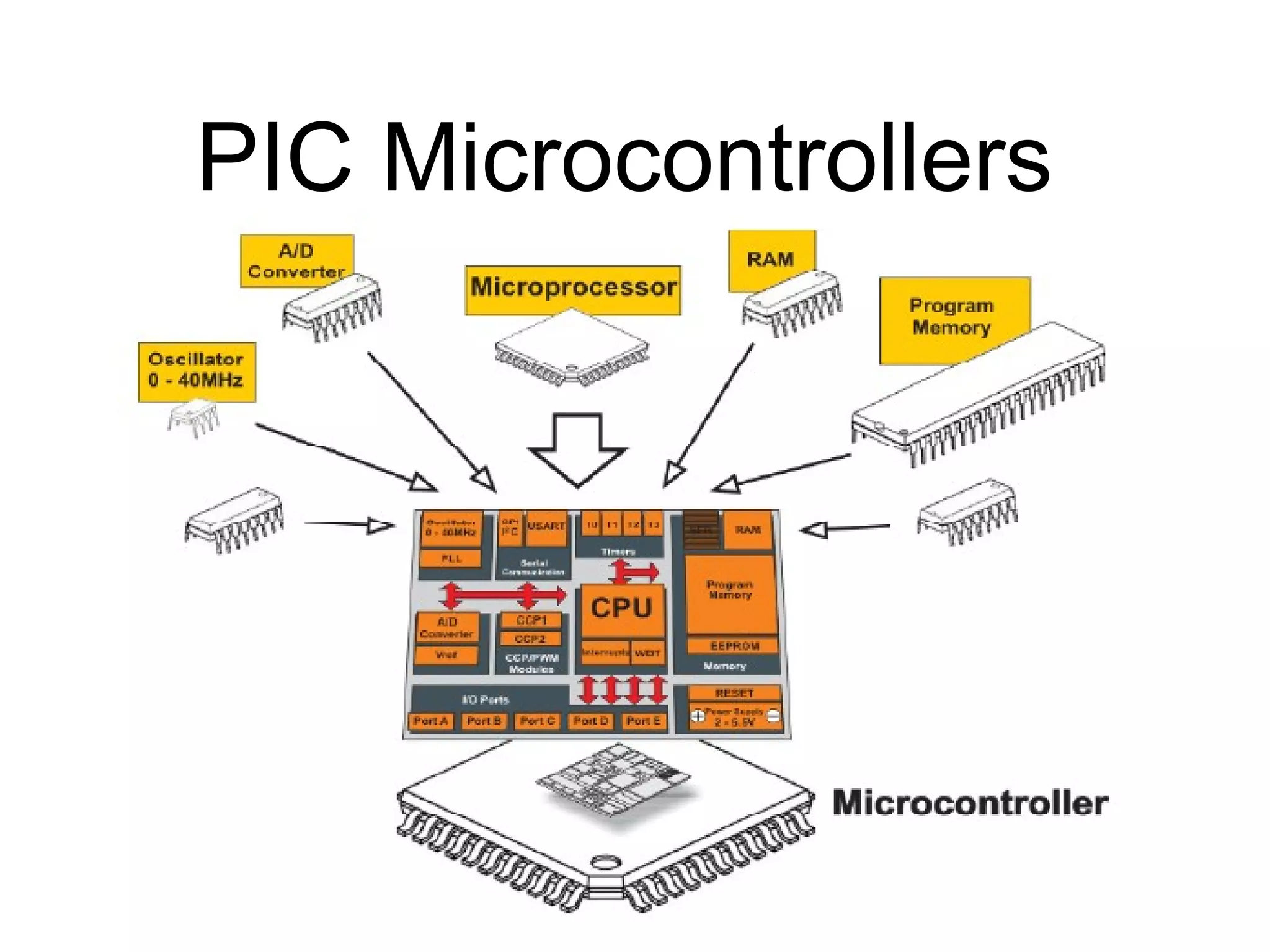
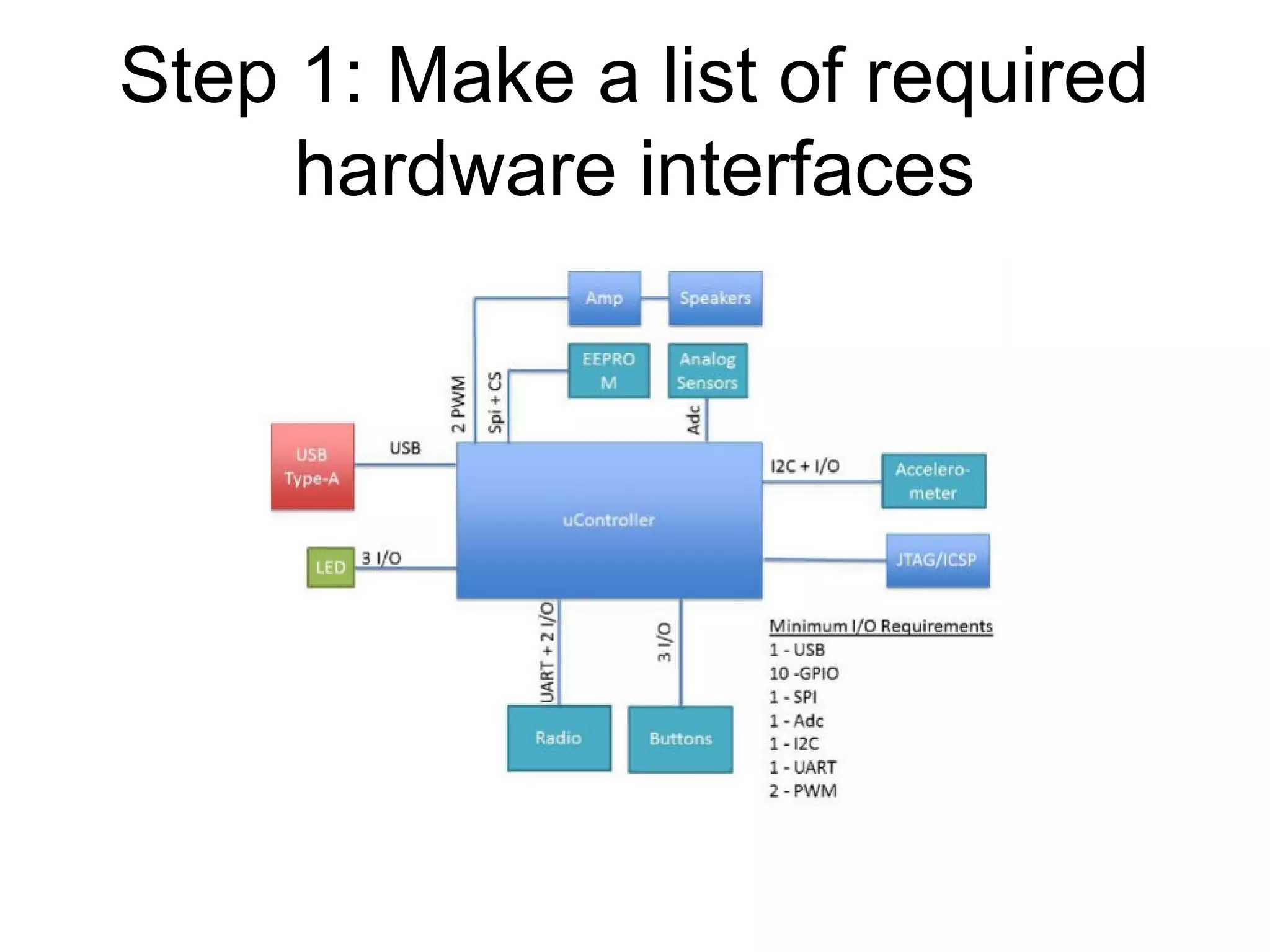
The document provides an overview of microprocessors and microcontrollers. It discusses the basic architecture of microprocessors, including the Von Neumann and Harvard architectures. It compares RISC and CISC instruction sets. Microcontrollers are defined as single-chip computers containing a CPU, memory, and I/O ports. Common PIC microcontrollers are described along with their characteristics such as speed, memory types, and analog/digital capabilities. The document also outlines best practices for selecting a suitable microcontroller for a project, including identifying hardware interfaces, memory needs, programming tools, and cost/power constraints.































































![Robotics & Embedded IoT System Design [Day-3]](https://cdn.slidesharecdn.com/ss_thumbnails/roboticsiot-3-170621121447-thumbnail.jpg?width=600ounds&width=560&fit=bounds)





















