Download as PDF, PPTX
























![Embedded Linux Kernel
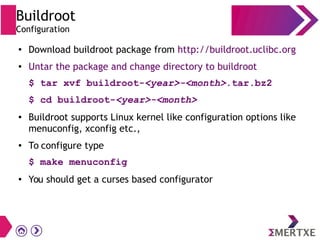
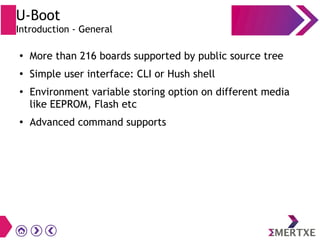
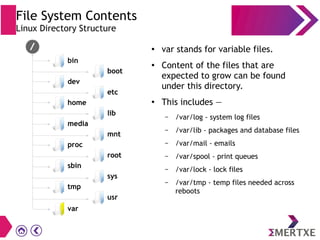
Configuration – make config
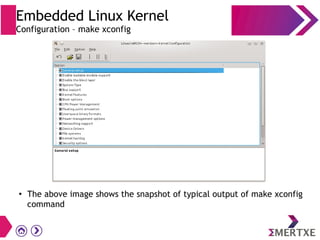
user@hostname:linux-<version>$ make config
scripts/kconfig/conf --oldaskconfig Kconfig
*
* Linux/<ARCH> <version> Kernel Configuration
*
Patch physical to virtual translations at runtime (ARCH_PATCH_PHYS_VIRT) [Y/n/?]
●
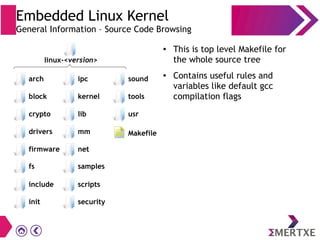
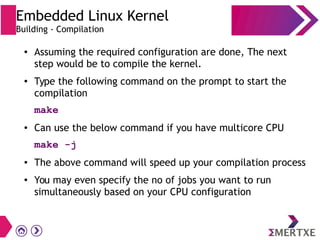
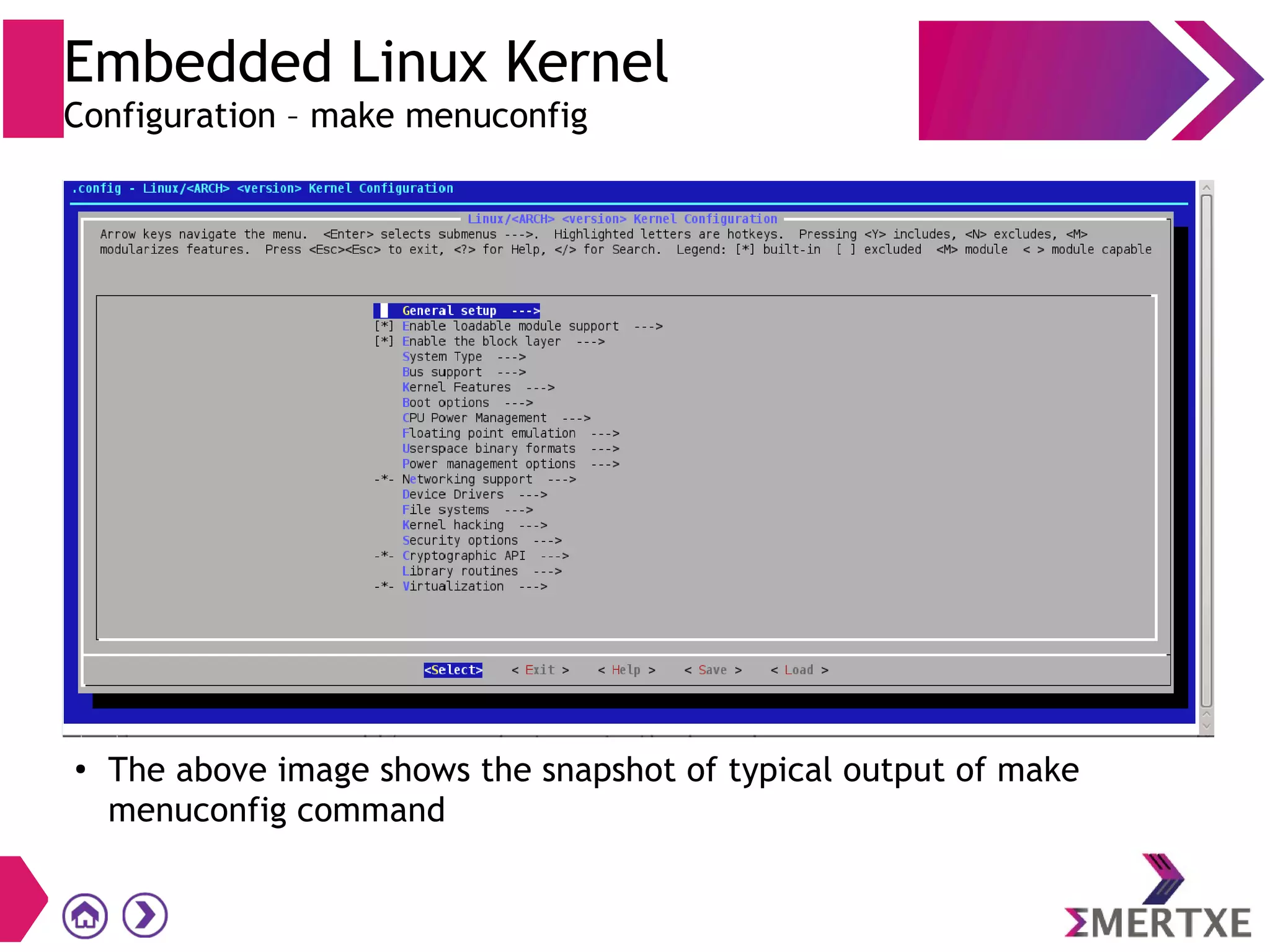
The above image show snap shot typical output of make config
command
●
Updates current config utilizing a line-oriented program
●
No user friendly approach. Could be used if you have limited host
installations
●
The problem with this approach is that, It force you to follow an
sequence of questions while configuration.
●
Have to use “Ctrl C” to exit](https://image.slidesharecdn.com/embeddedlinux-190430122606/85/Embedded-Operating-System-Linux-151-320.jpg)





























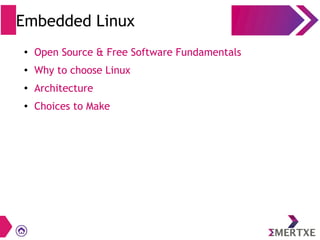
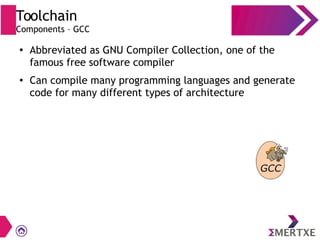
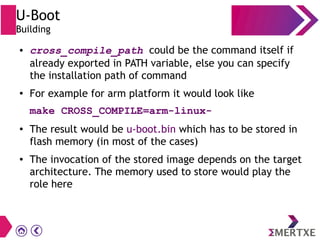
![Embedded Linux Kernel
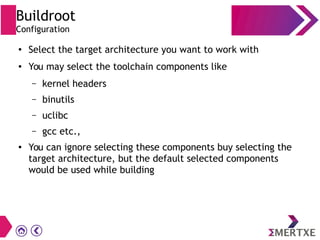
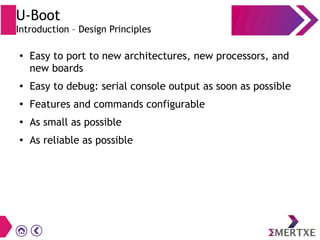
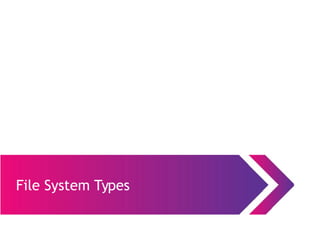
Configuration – make config
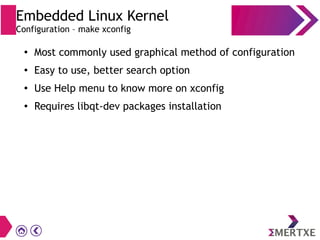
user@hostname:linux-<version>$ make config
scripts/kconfig/conf --oldaskconfig Kconfig
*
* Linux/<ARCH> <version> Kernel Configuration
*
Patch physical to virtual translations at runtime (ARCH_PATCH_PHYS_VIRT) [Y/n/?]
●
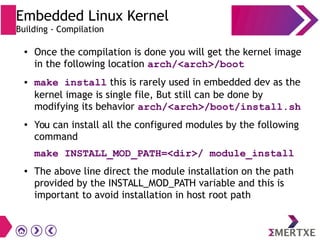
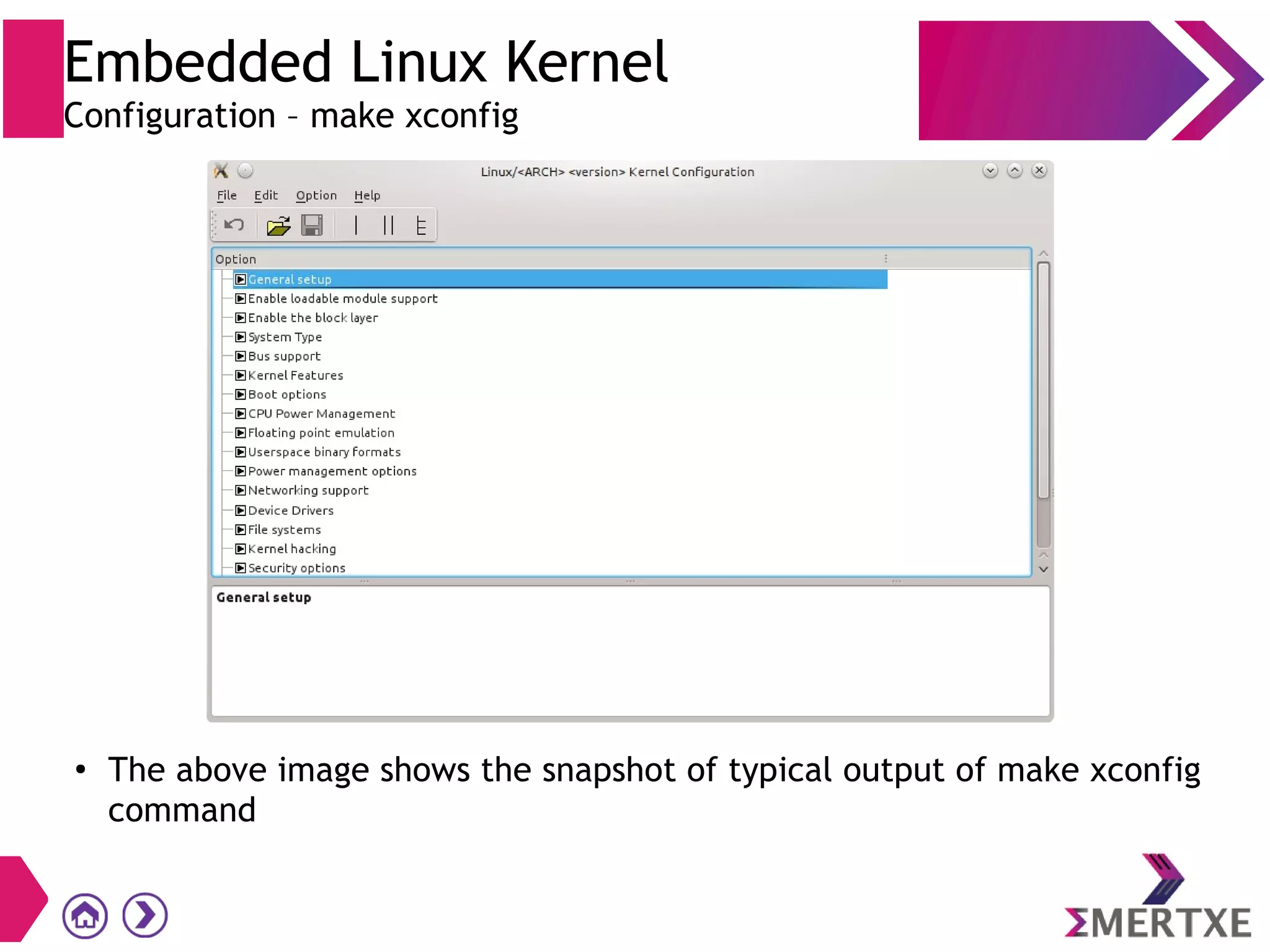
The above image show snap shot typical output of make config
command
●
Updates current config utilizing a line-oriented program
●
No user friendly approach. Could be used if you have limited host
installations
●
The problem with this approach is that, It force you to follow an
sequence of questions while configuration.
●
Have to use “Ctrl C” to exit](https://image.slidesharecdn.com/embeddedlinux-190430122606/75/Embedded-Operating-System-Linux-151-2048.jpg)







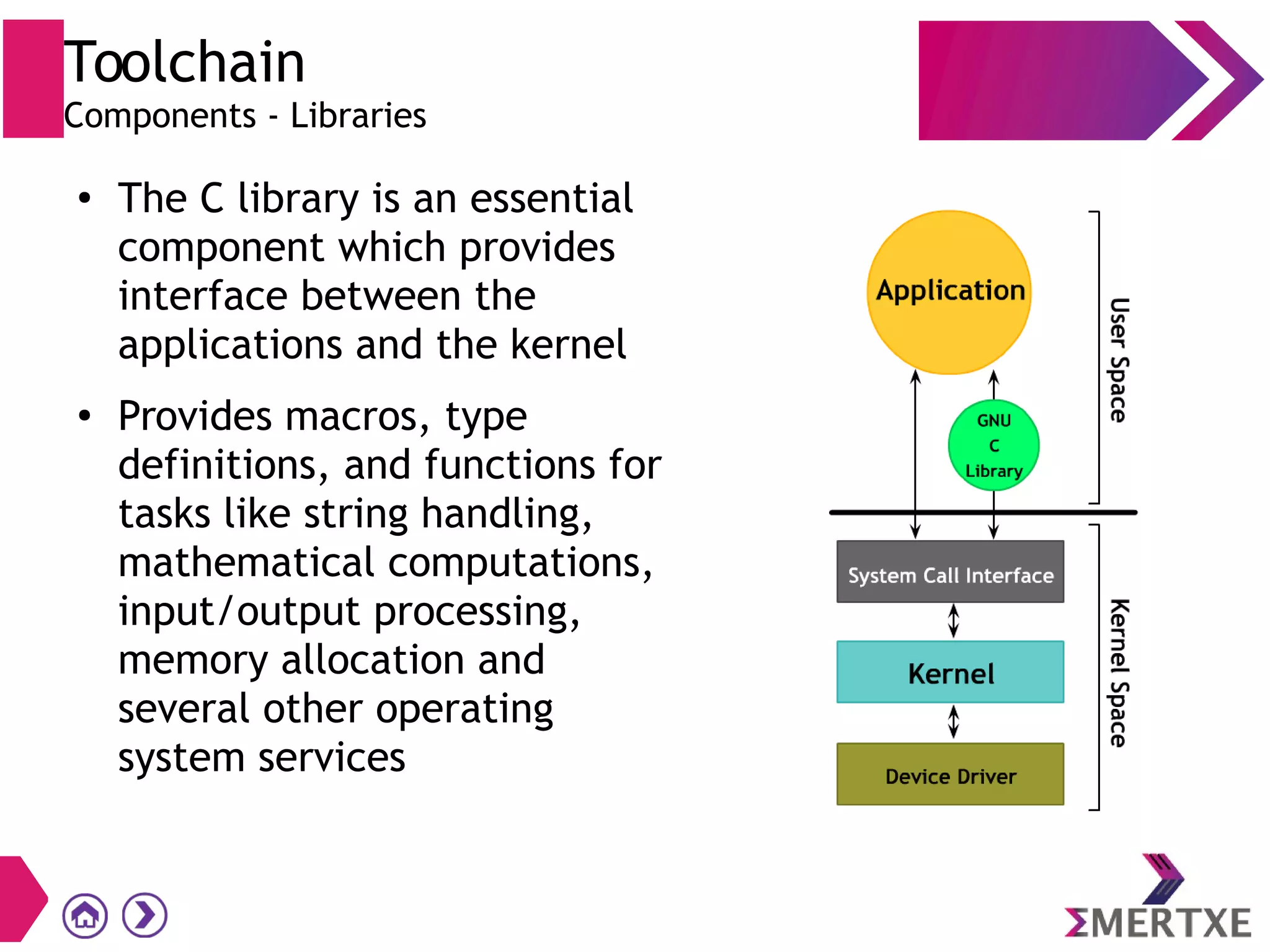
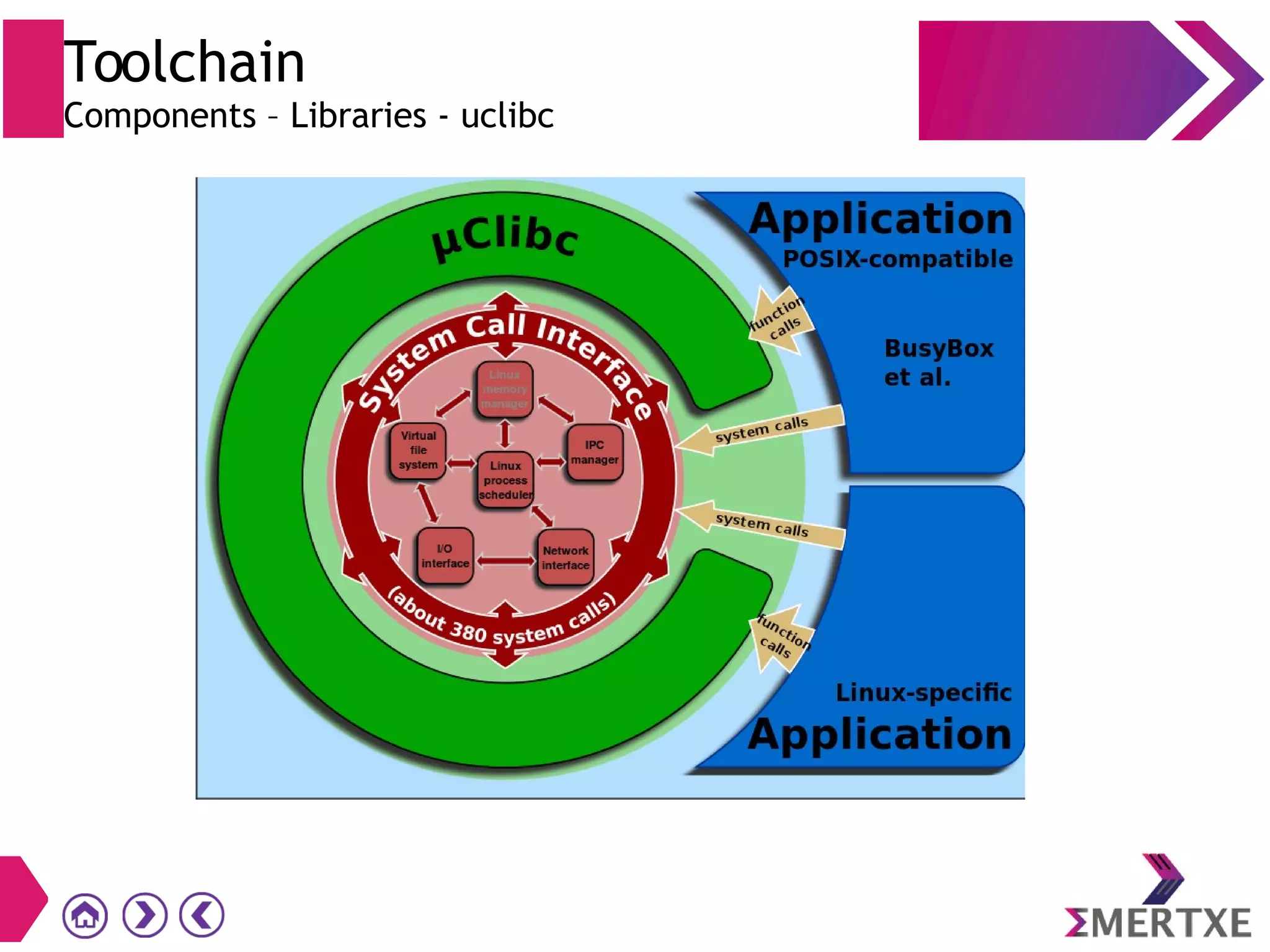
The document provides an extensive overview of embedded operating systems, specifically focusing on Linux. It discusses the evolution of open-source software, the architecture of embedded Linux systems, and the toolchain development process, detailing components such as compilers, libraries, and bootloaders. Additionally, it covers practical aspects of building embedded systems using tools like Buildroot and Yocto, along with examples from specific hardware platforms.
Introduction to the presentation on Embedded Operating System with a focus on Linux. Contents discussed include embedded systems, Linux as an OS, development environments, and kernel.
Exploration of Linux as an embedded OS, including its open-source nature, architecture choices, and reasons for adoption in embedded systems.
Historical context of Open Source software beginning with GNU, leading to the development of Linux and the rise of community-driven software development.
Definition of Free Software emphasizing the four freedoms (copy, study, change, use) and licenses like GNU GPL that support these principles.Key advantages of using Embedded Linux, including modularity, reliability, extensibility, and performance capabilities.
Overview of various CPU architectures suitable for embedded Linux, such as ARM and PowerPC, and considerations for making choices regarding kernels and development environments.
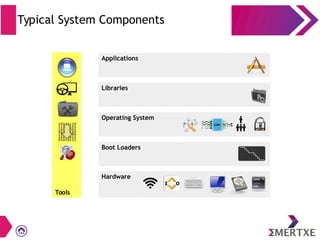
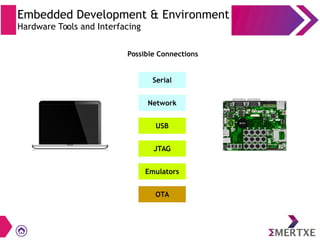
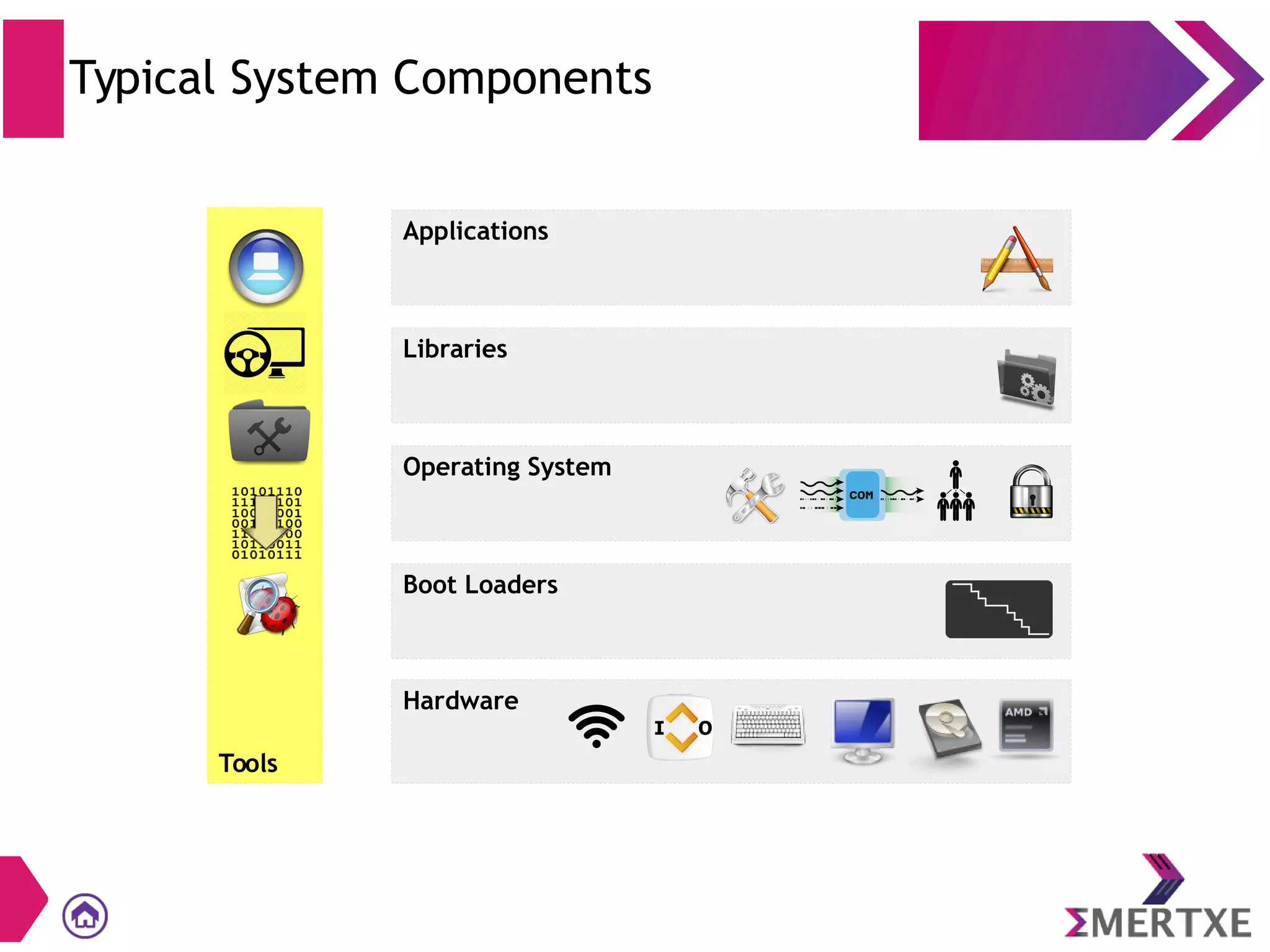
Discussion on the typical components of embedded development, including hardware tools, software environments, and toolchains necessary for development.
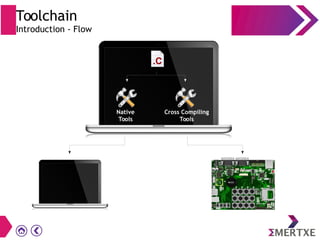
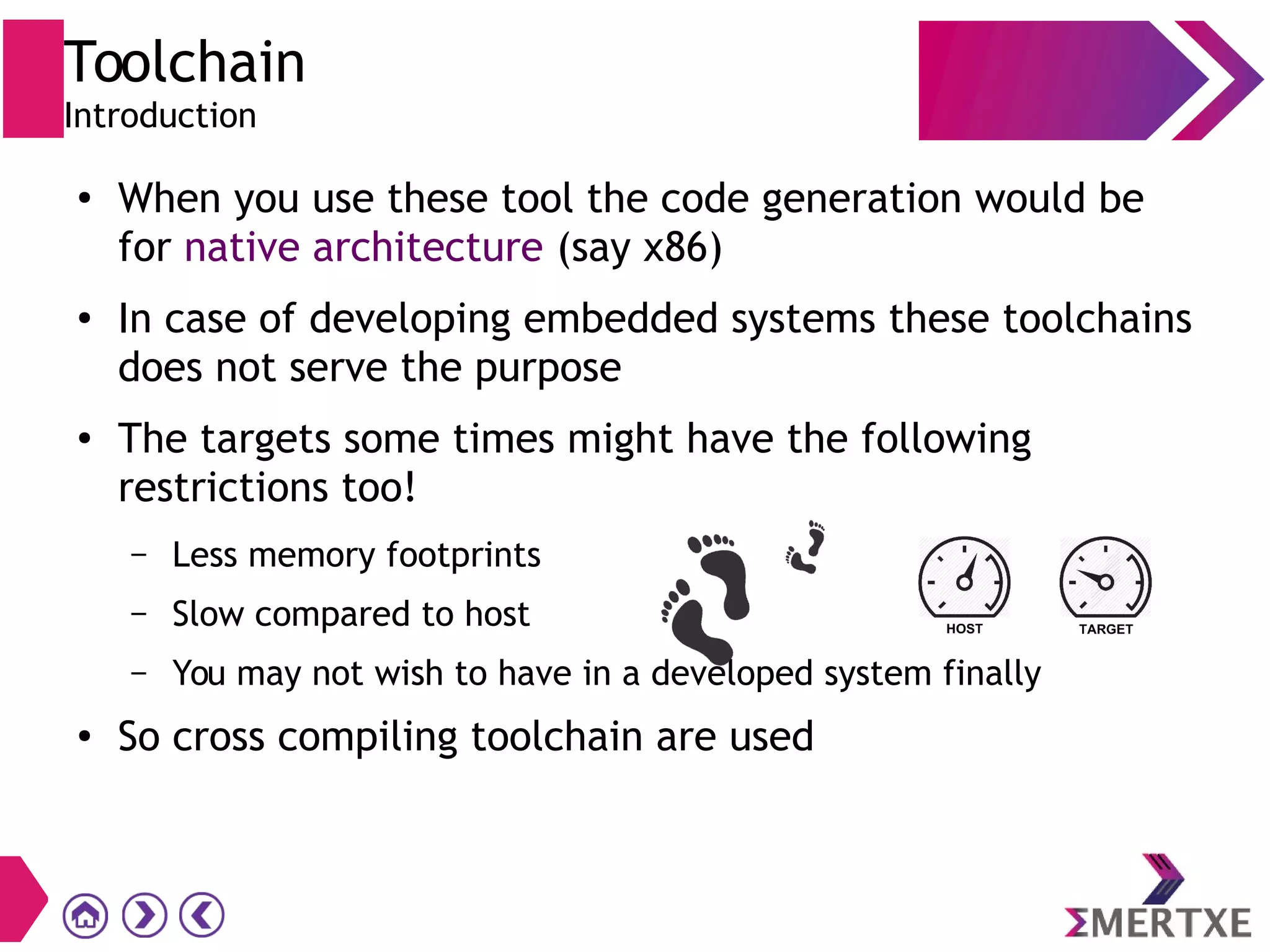
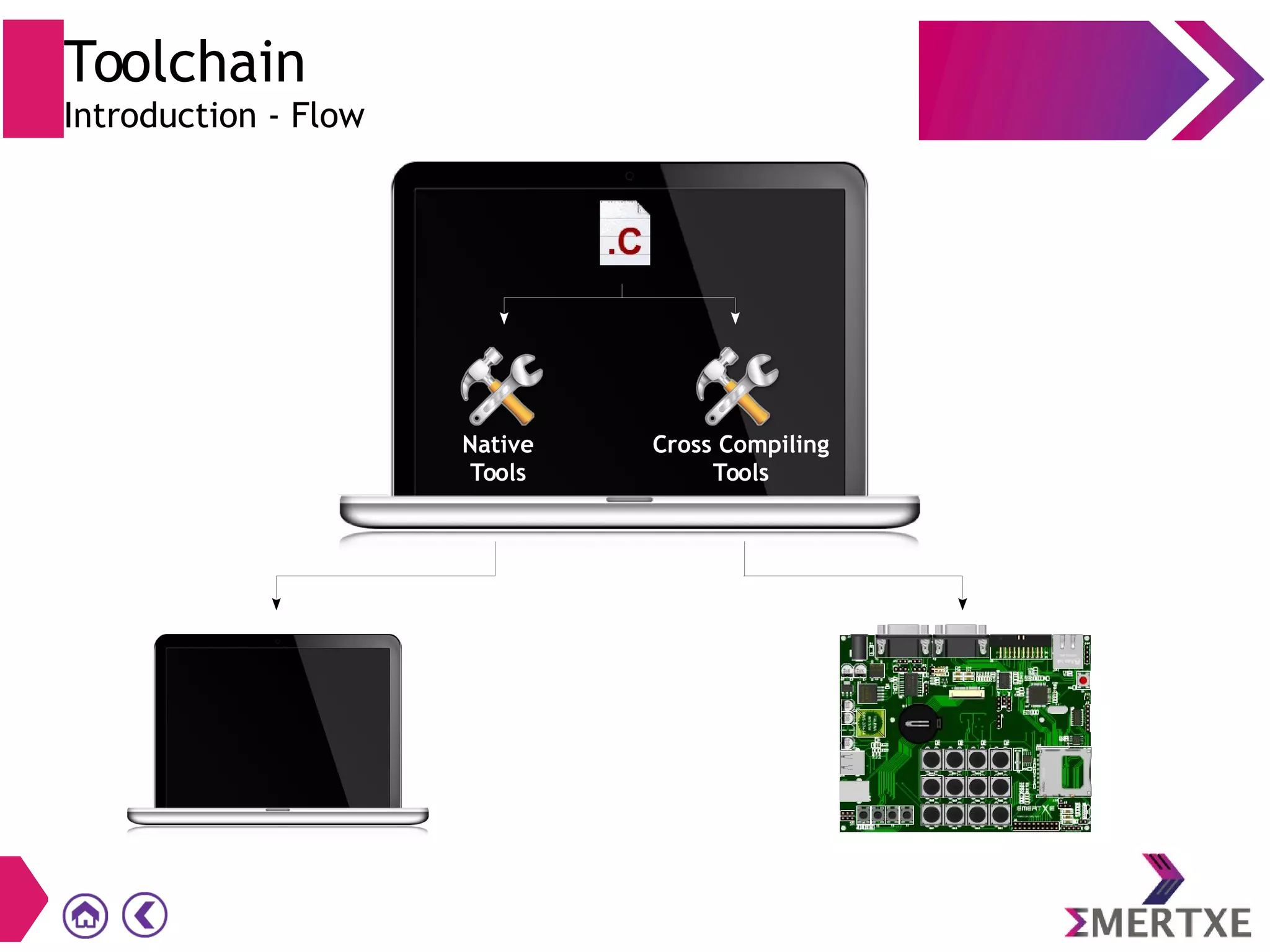
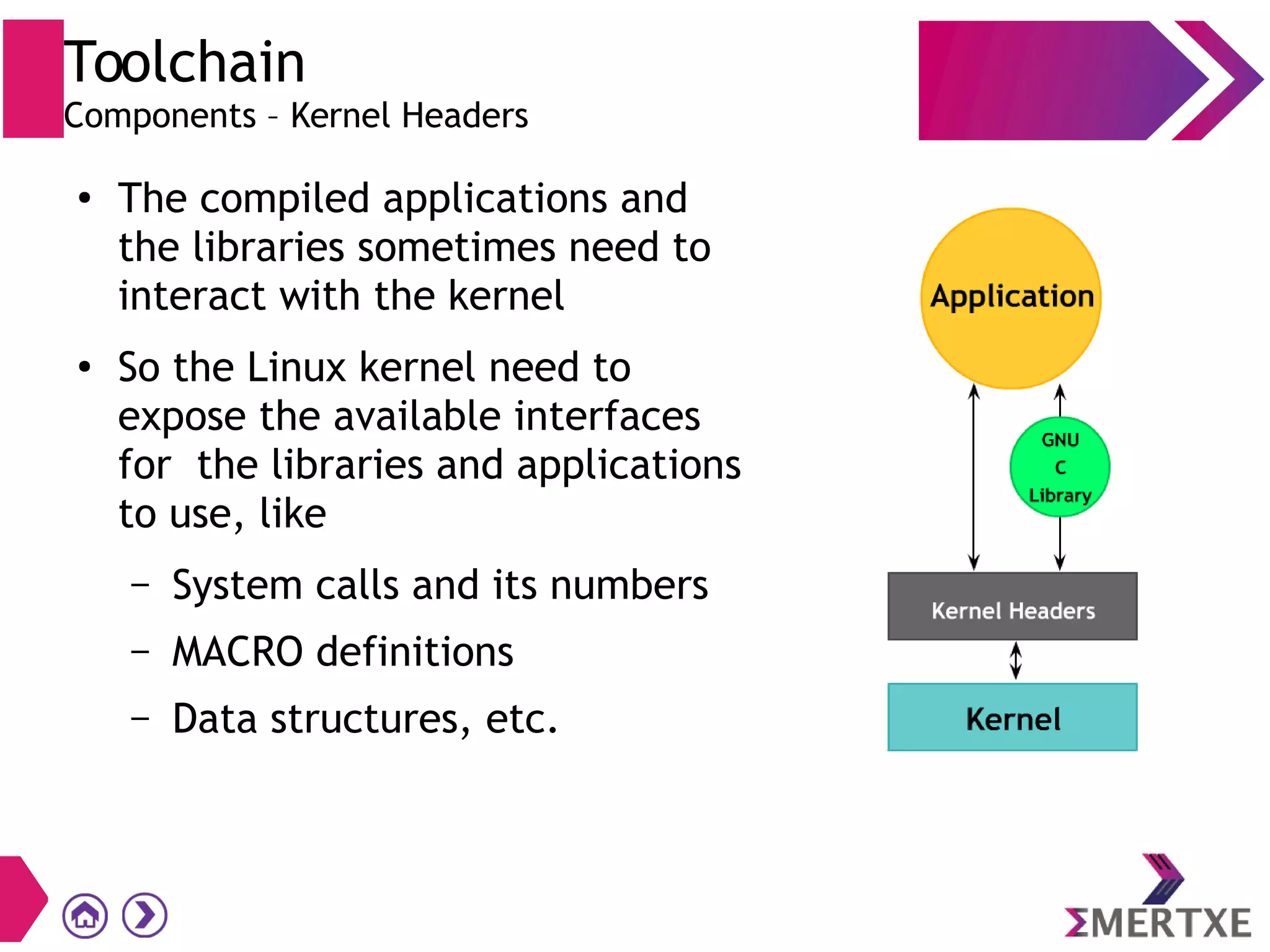
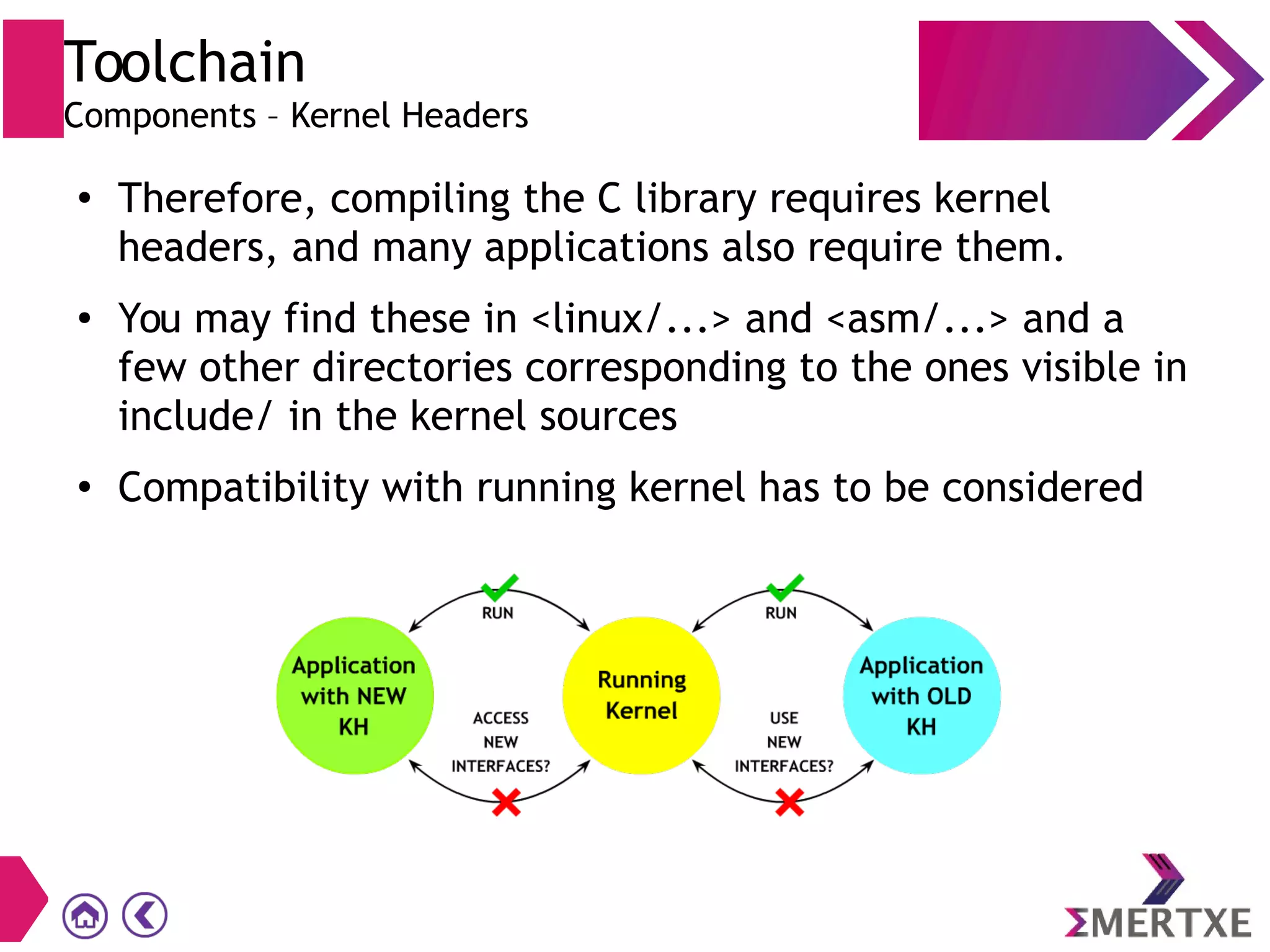
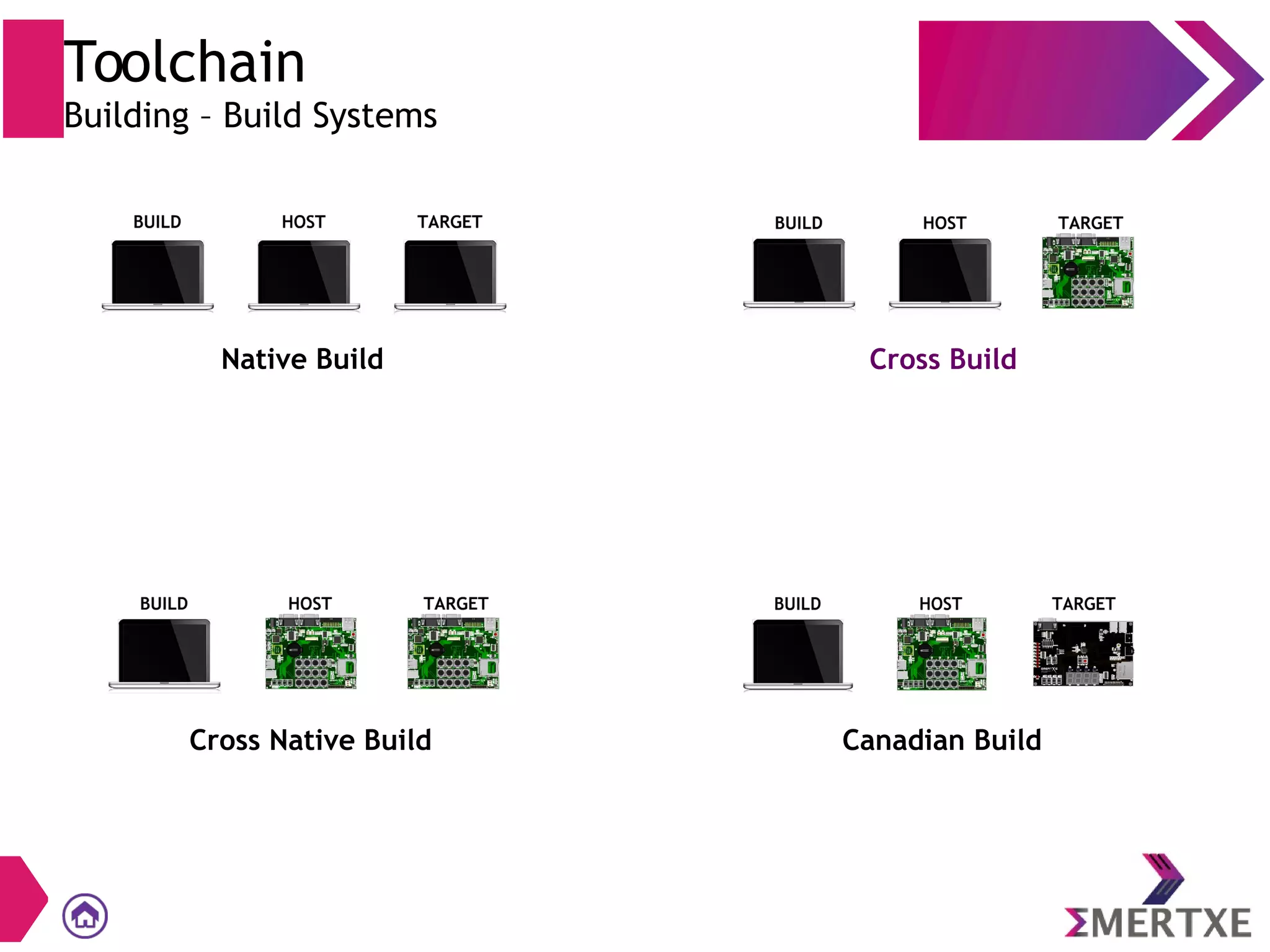
Definitions and discussions on toolchains, including native vs. cross-compiling tools, components like compilers and libraries, and considerations for building toolchains.
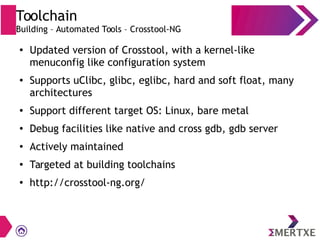
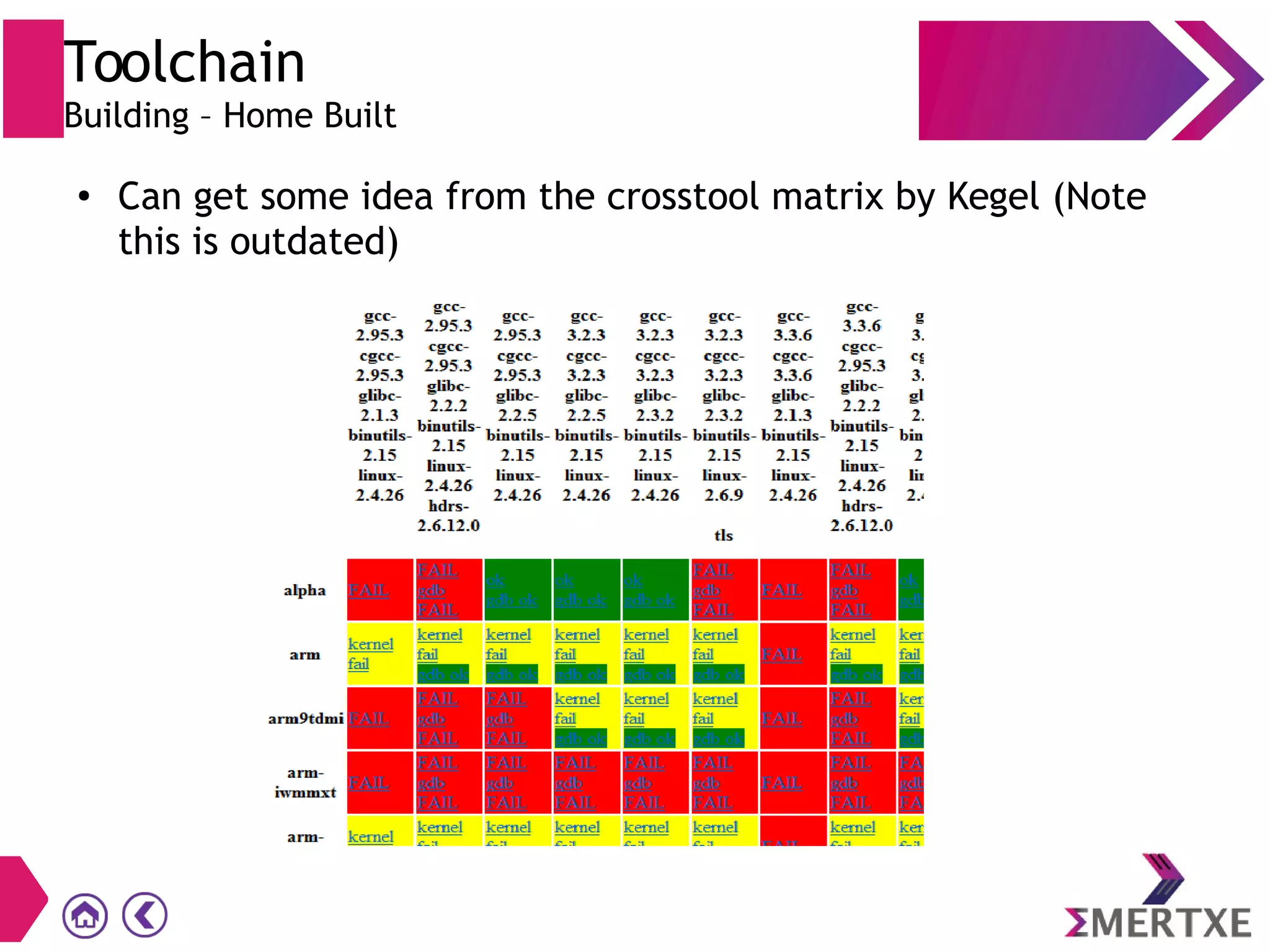
Different methods of building toolchains, focusing on pre-built, home-built, and automated tools like Crosstool-NG and Buildroot for embedded systems.
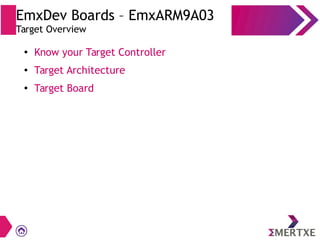
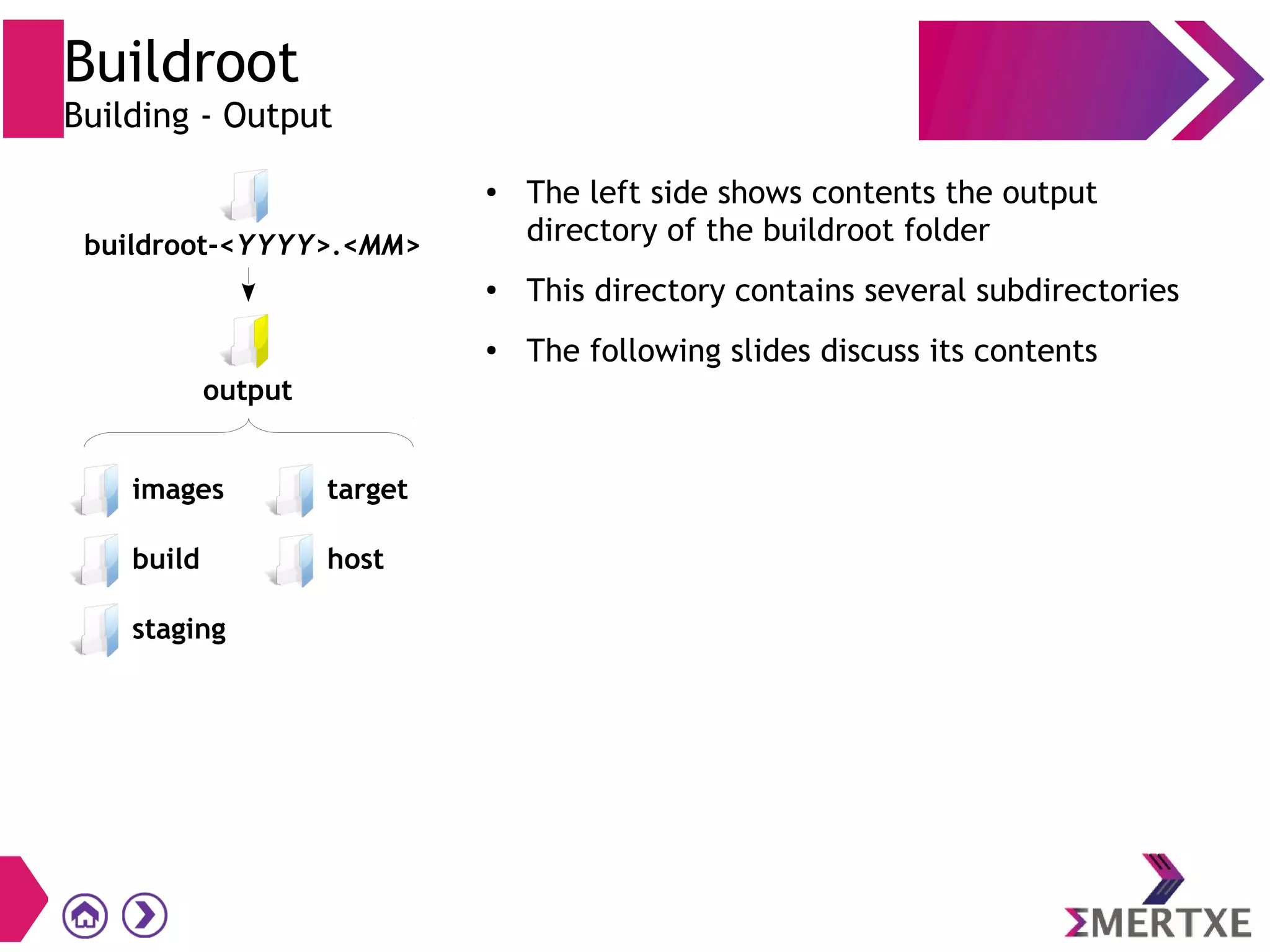
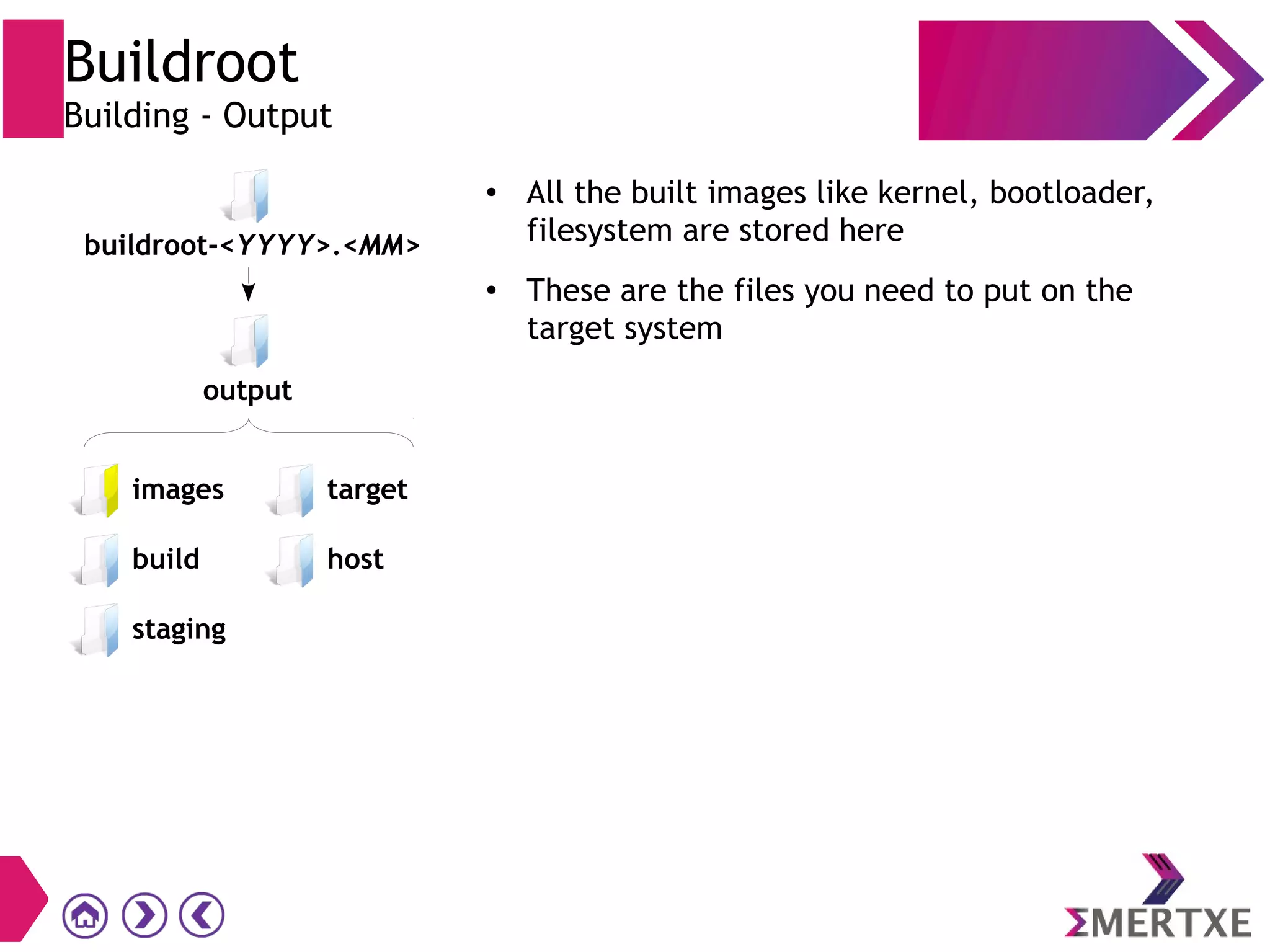
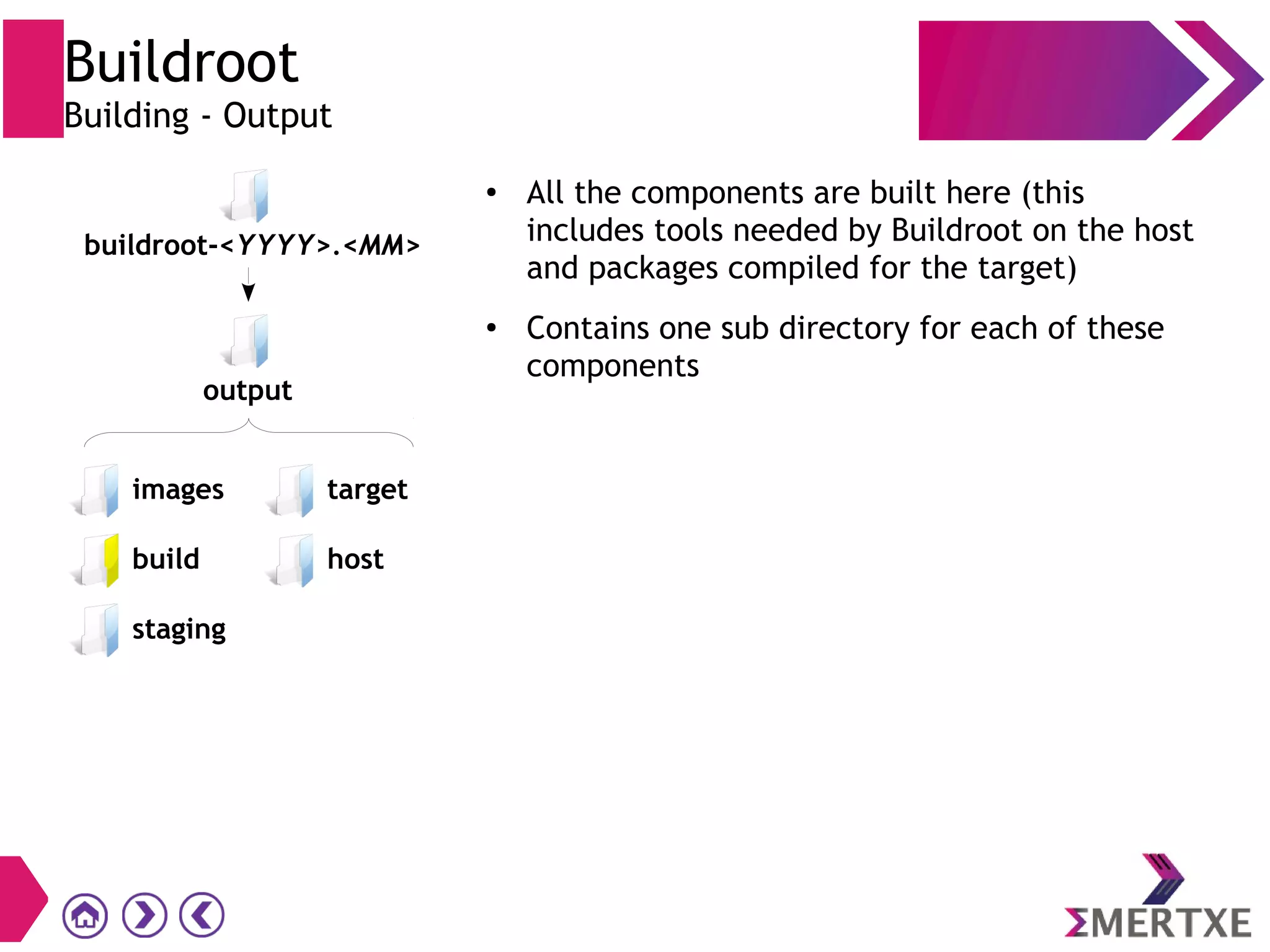
Introduction to Buildroot as a tool for generating complete embedded Linux systems, including steps for building and understanding the output directory structure.
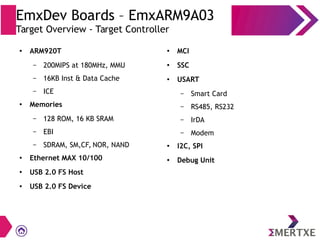
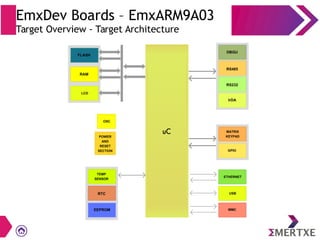
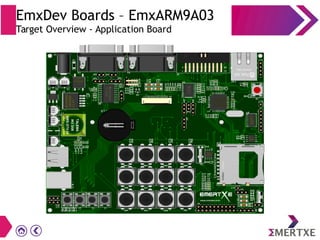
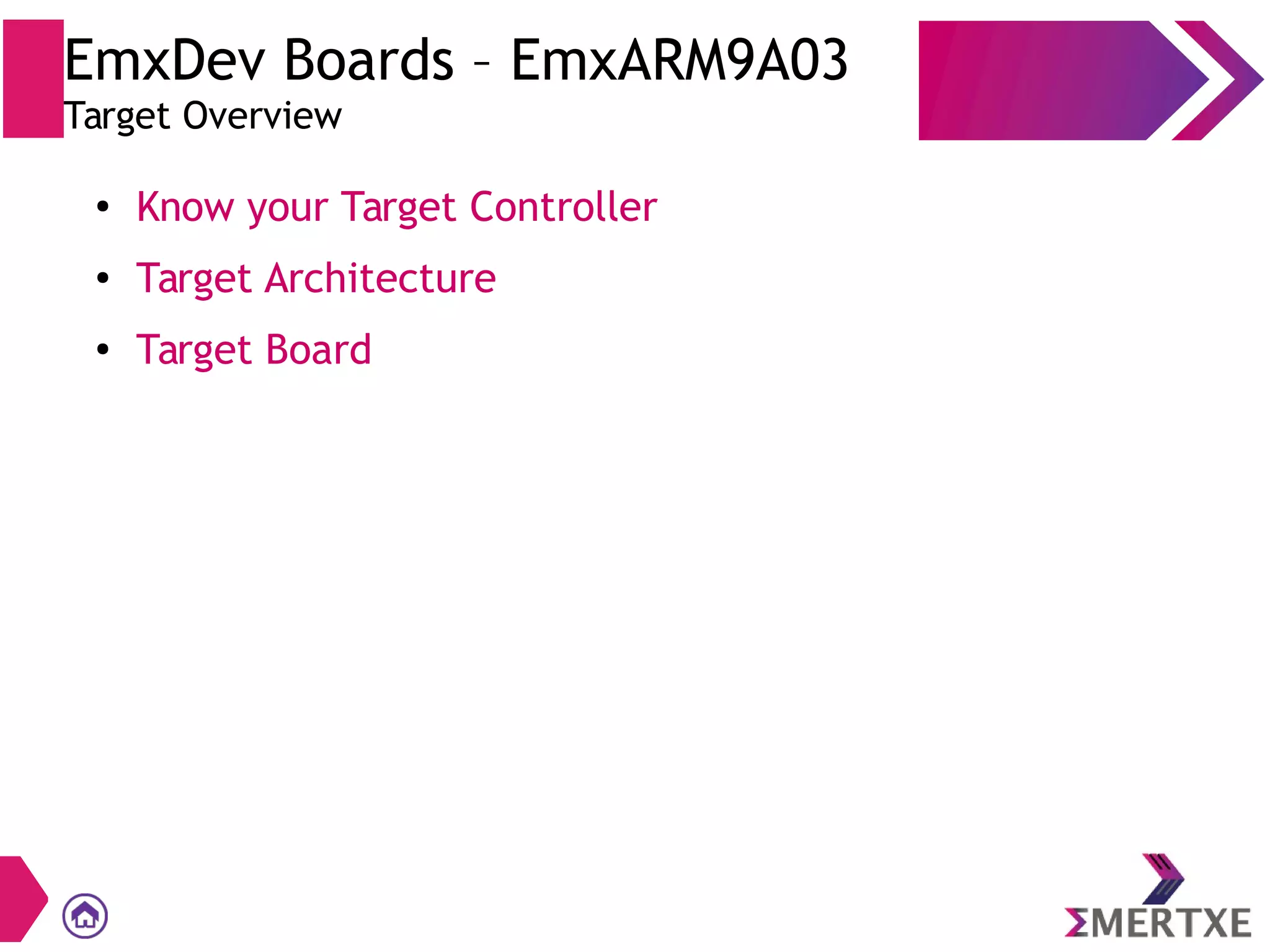
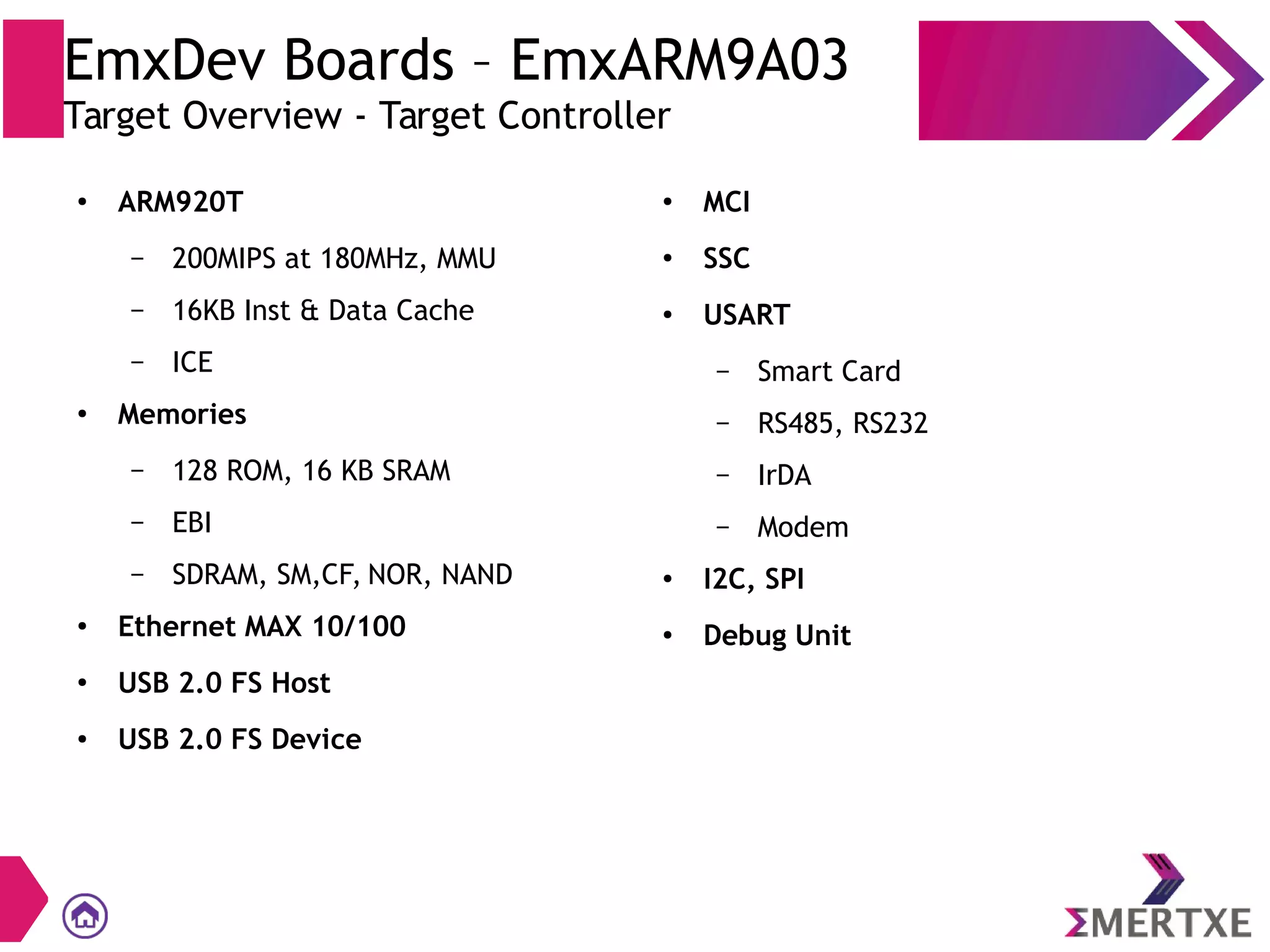
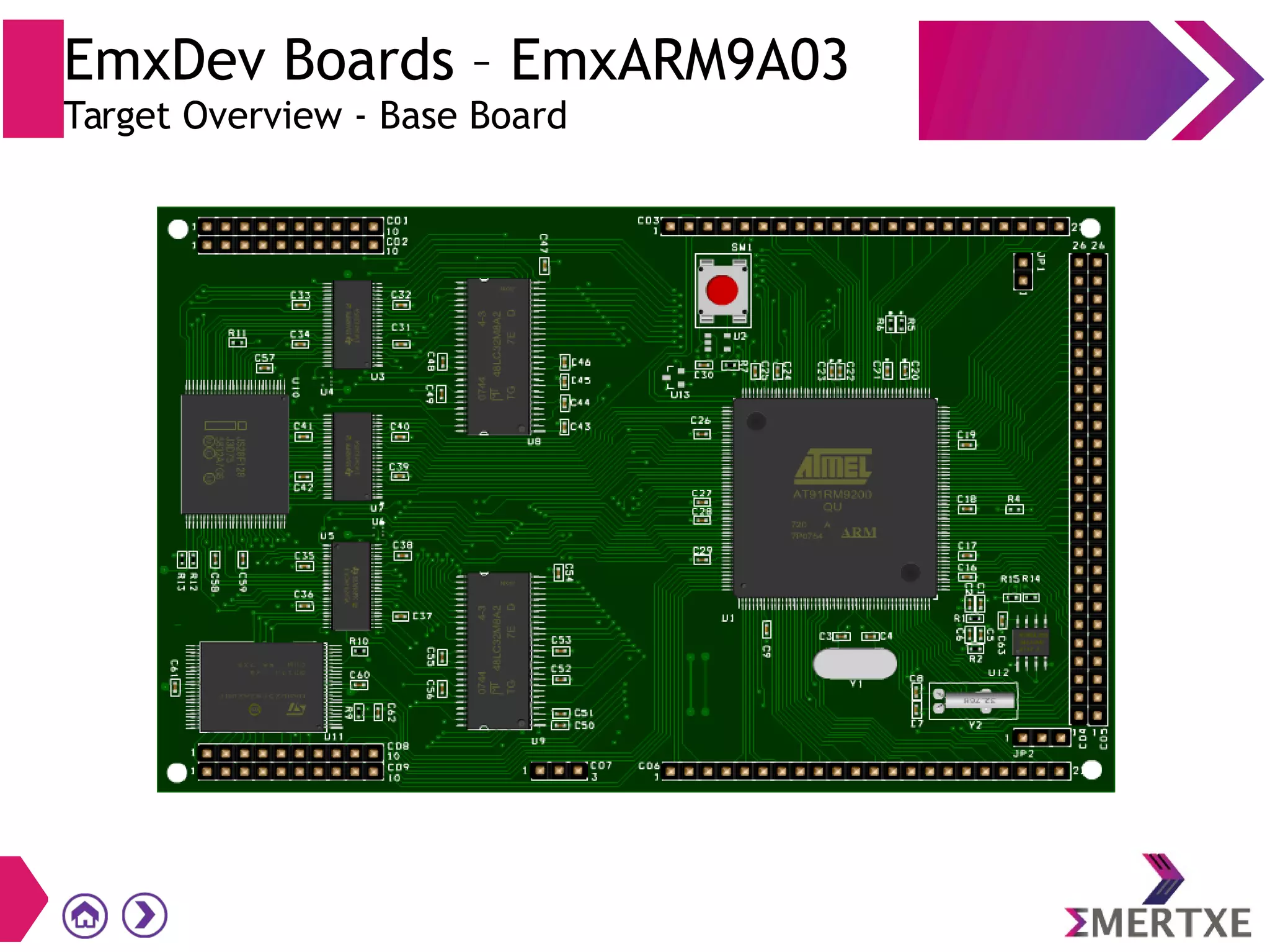
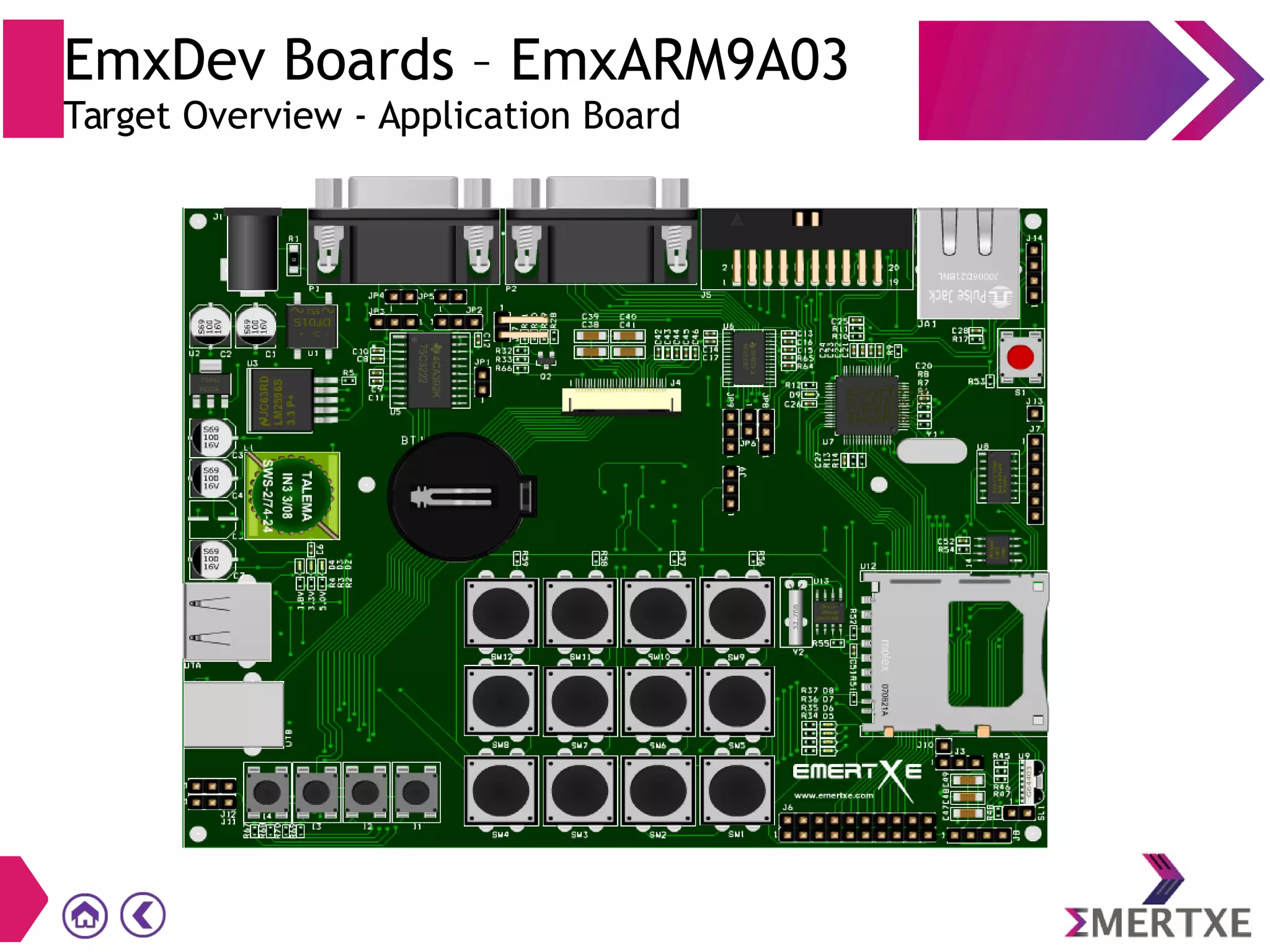
Detailed architecture and specifications of the EmxARM9A03 development board, including CPU, memory configurations, and device interfaces.
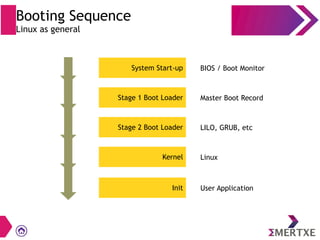
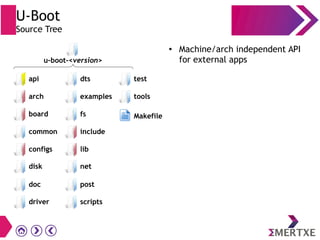
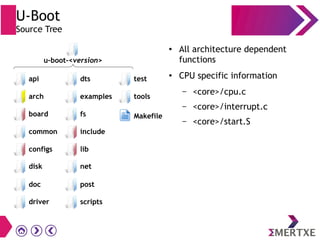
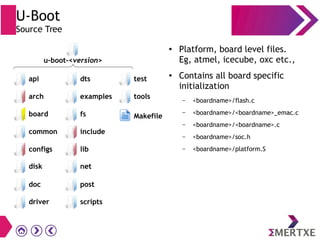
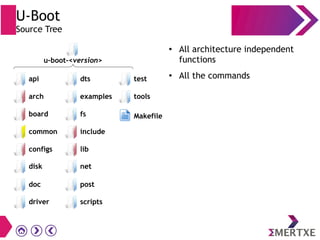
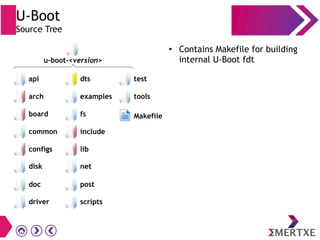
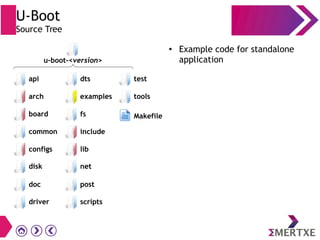
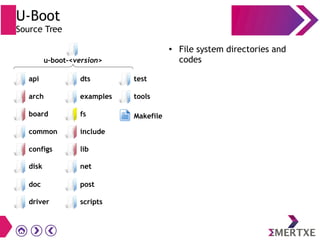
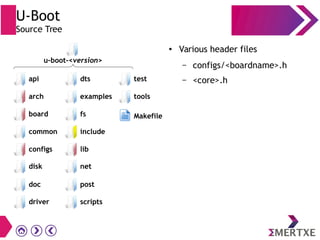
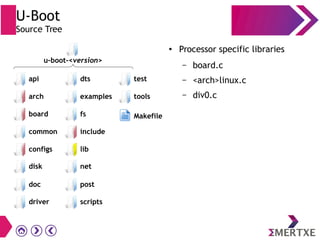
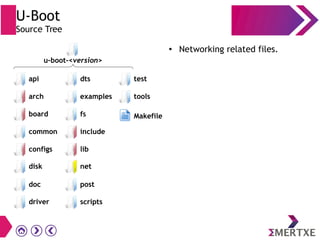
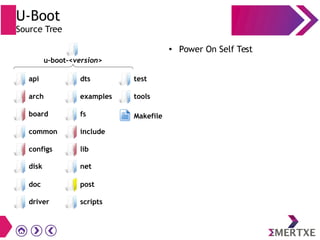
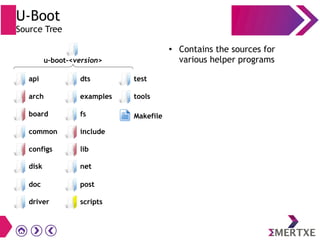
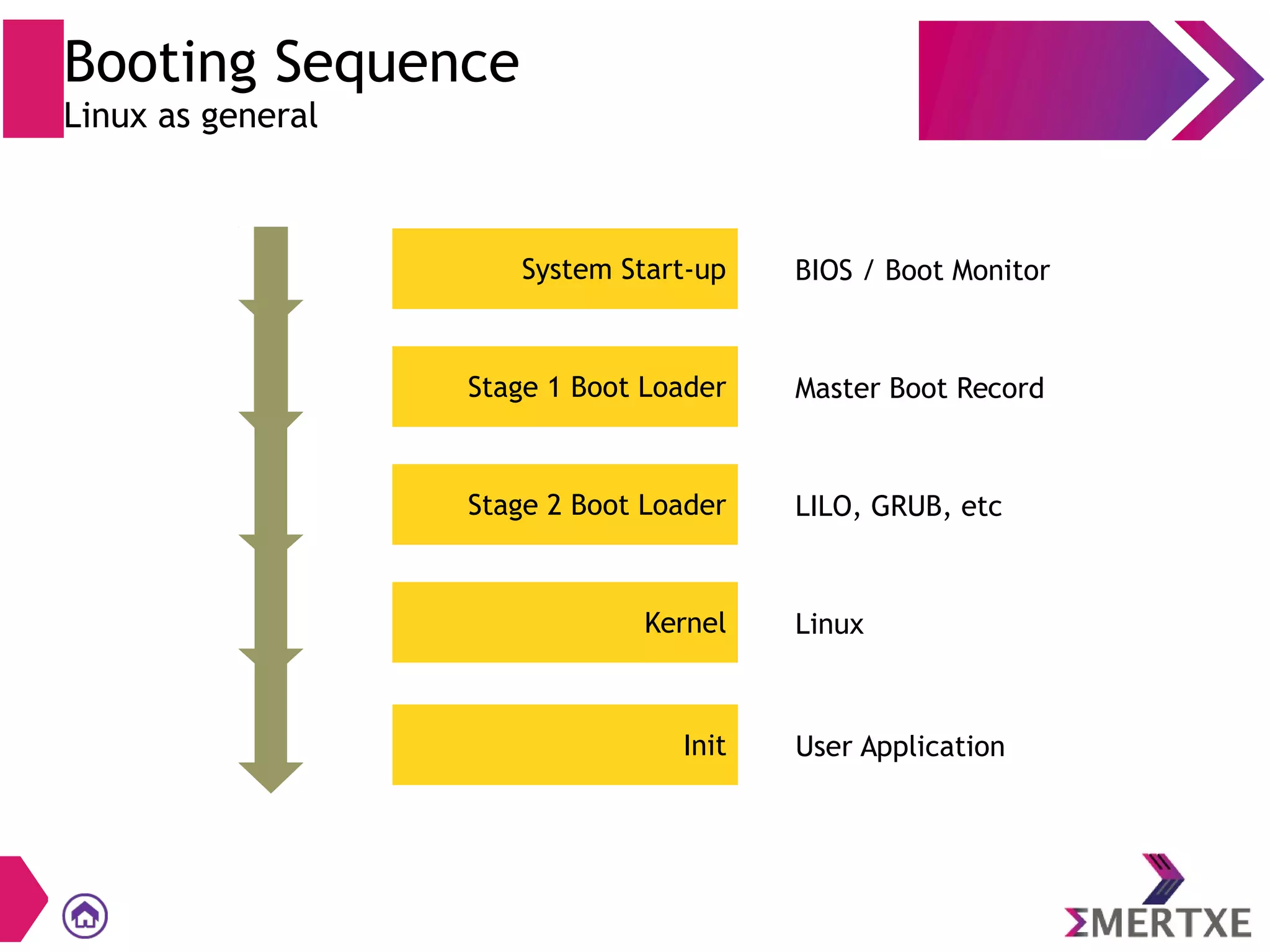
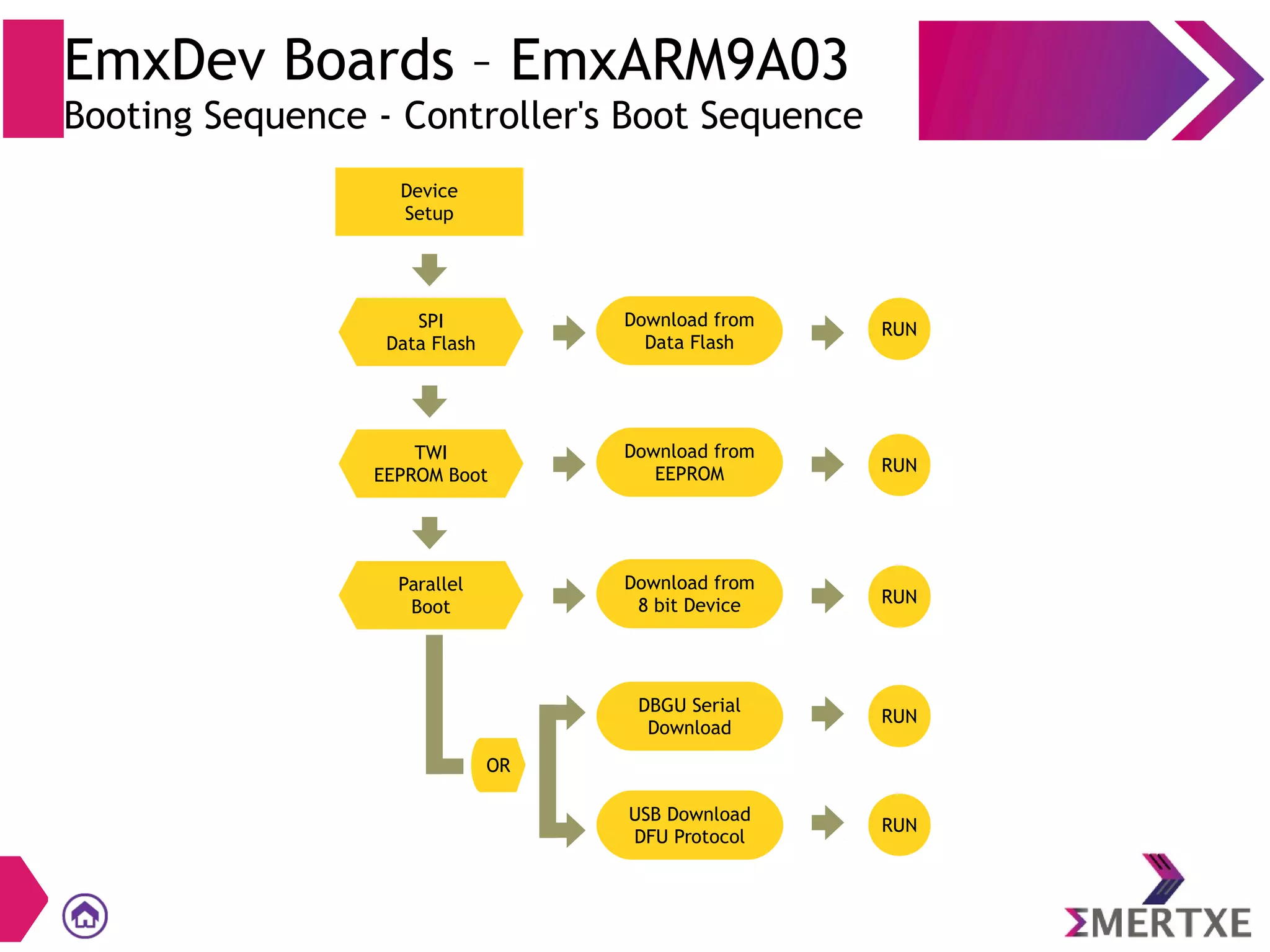
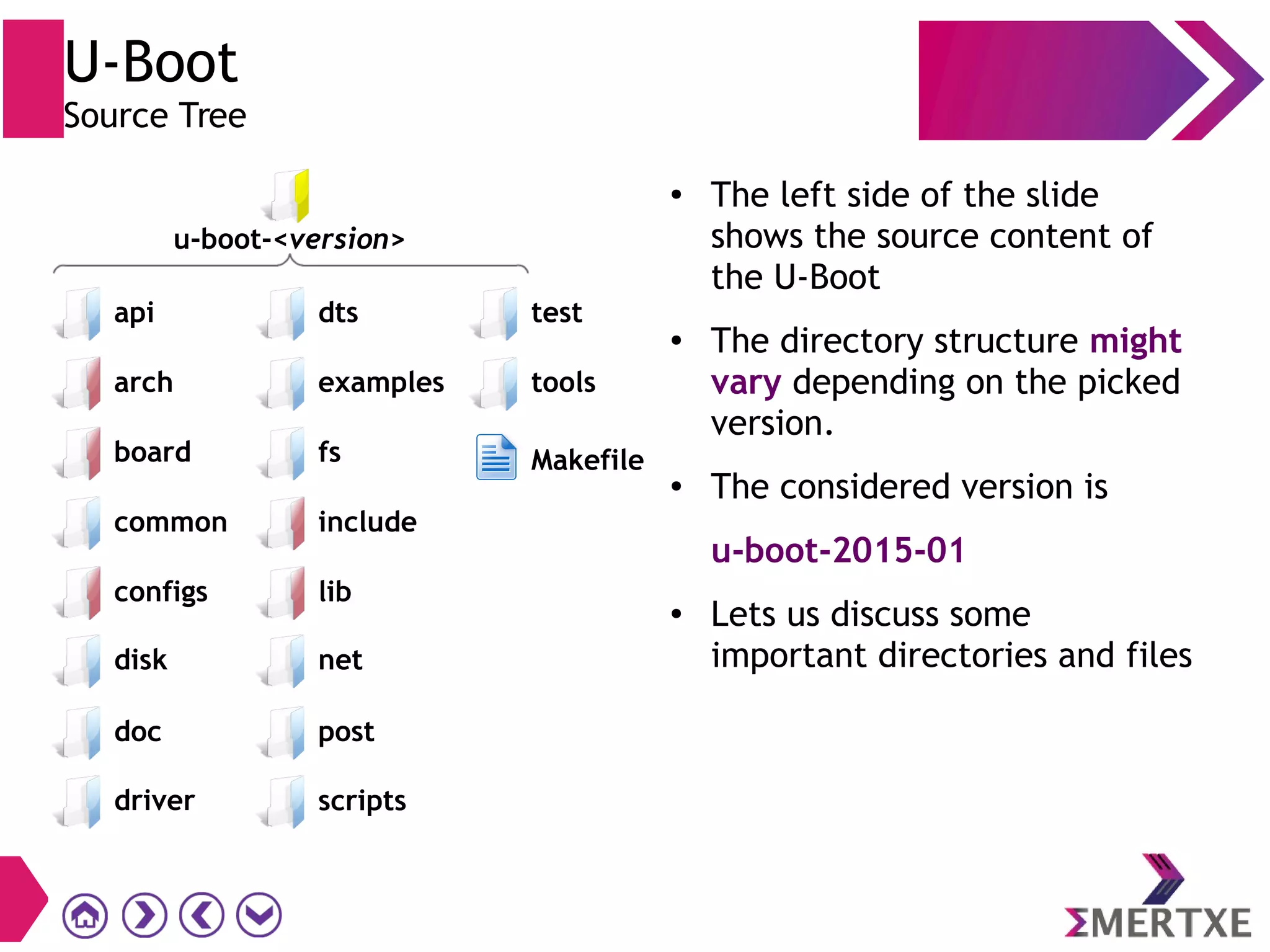
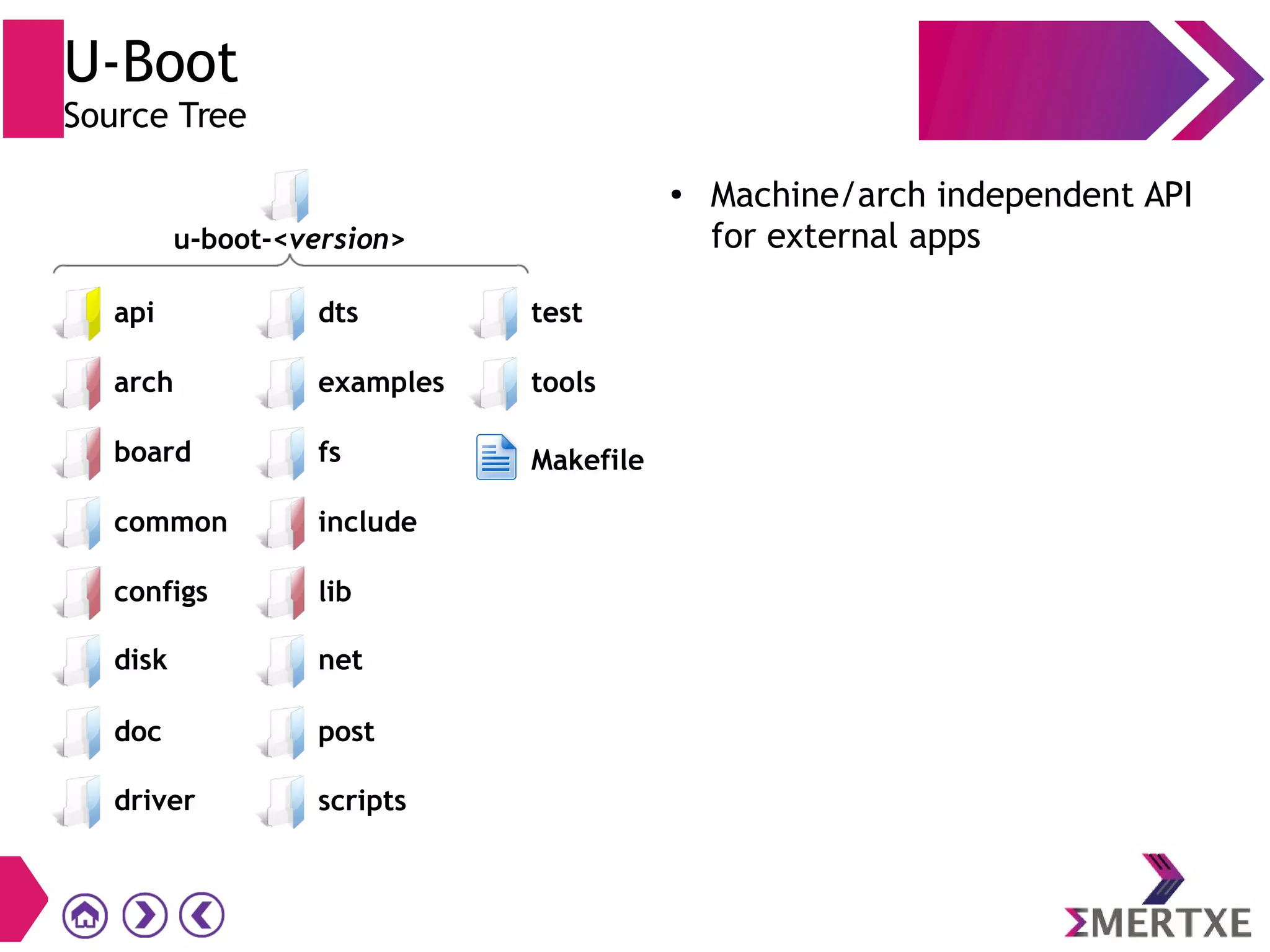
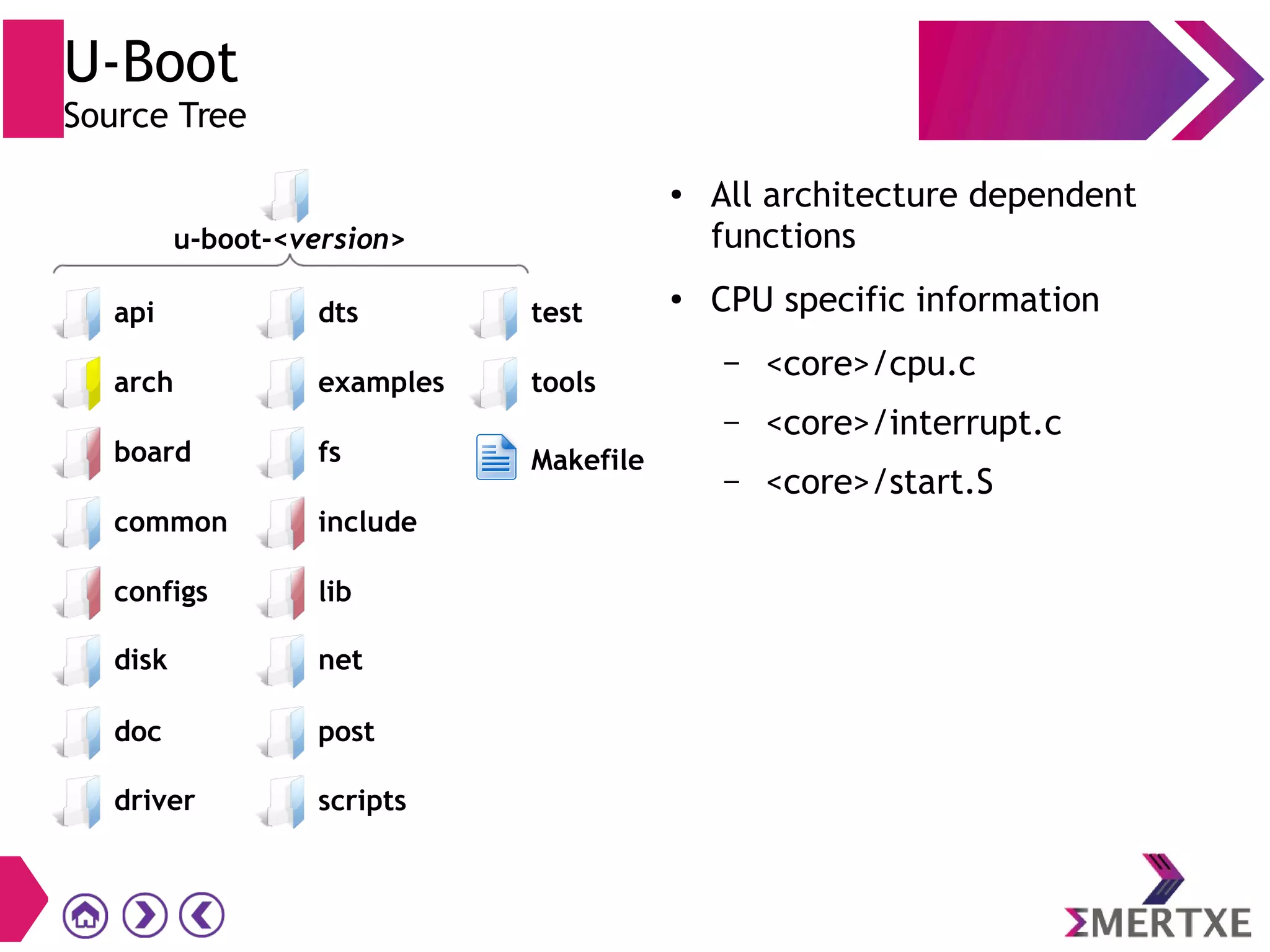
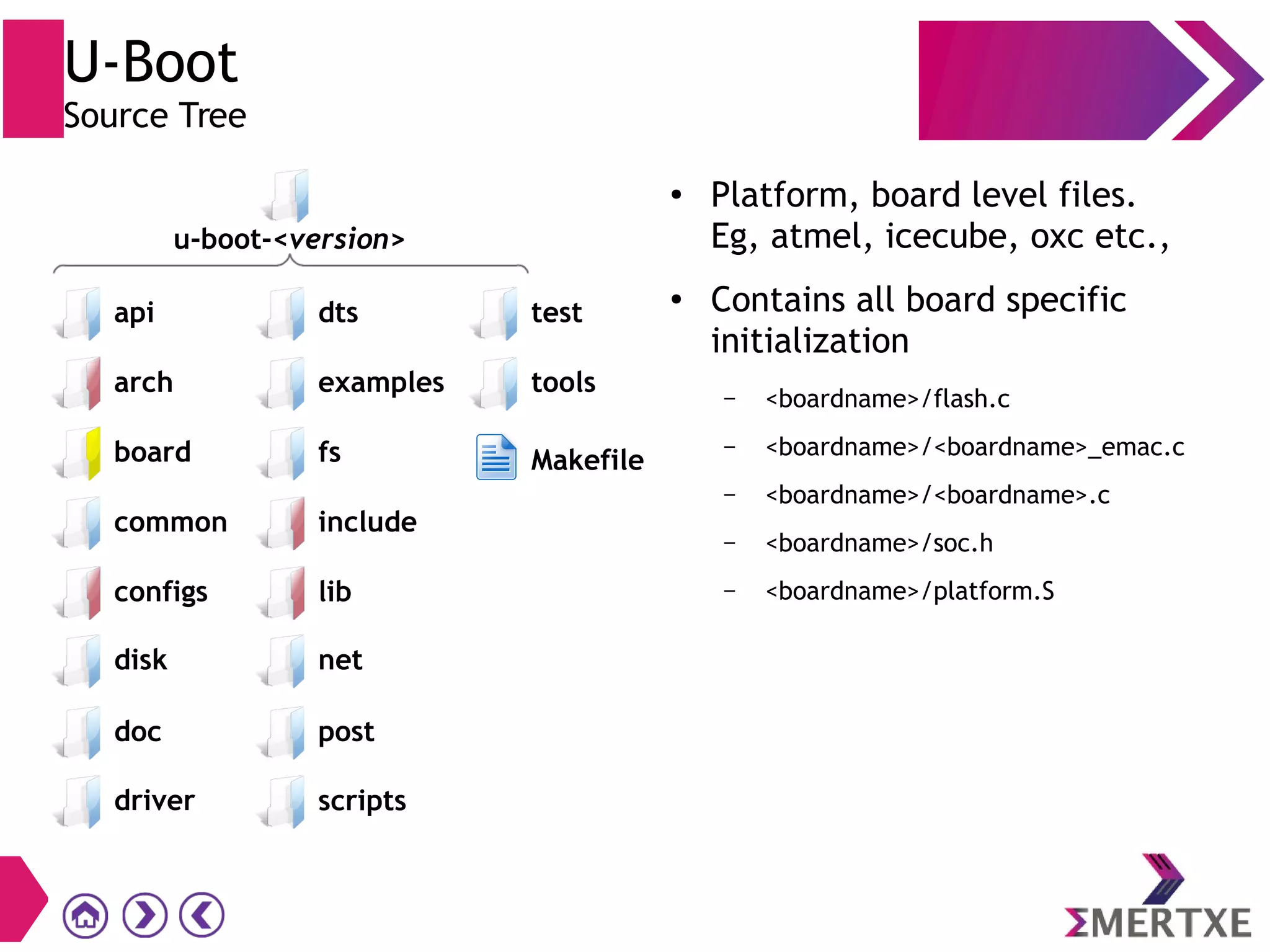
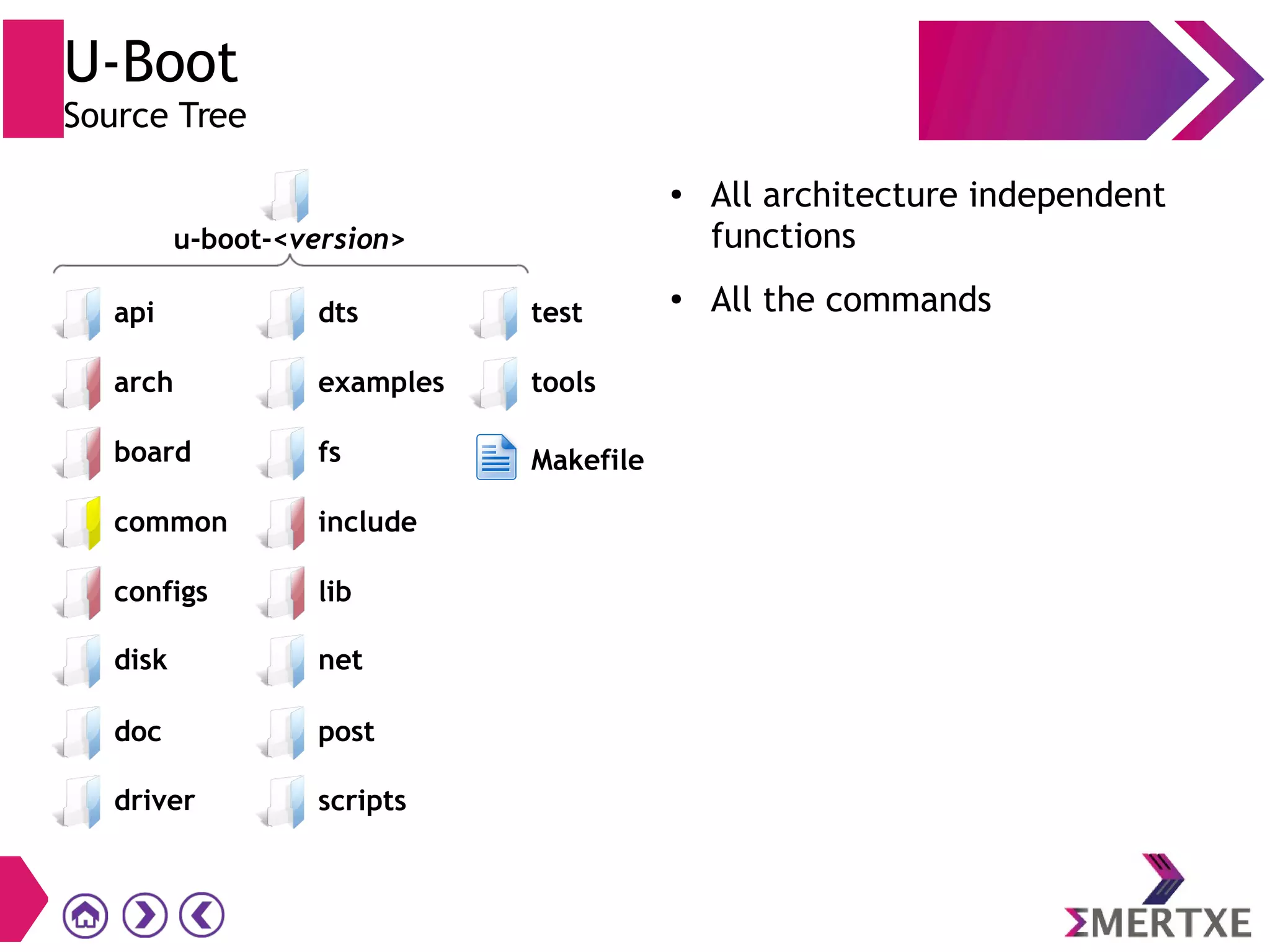
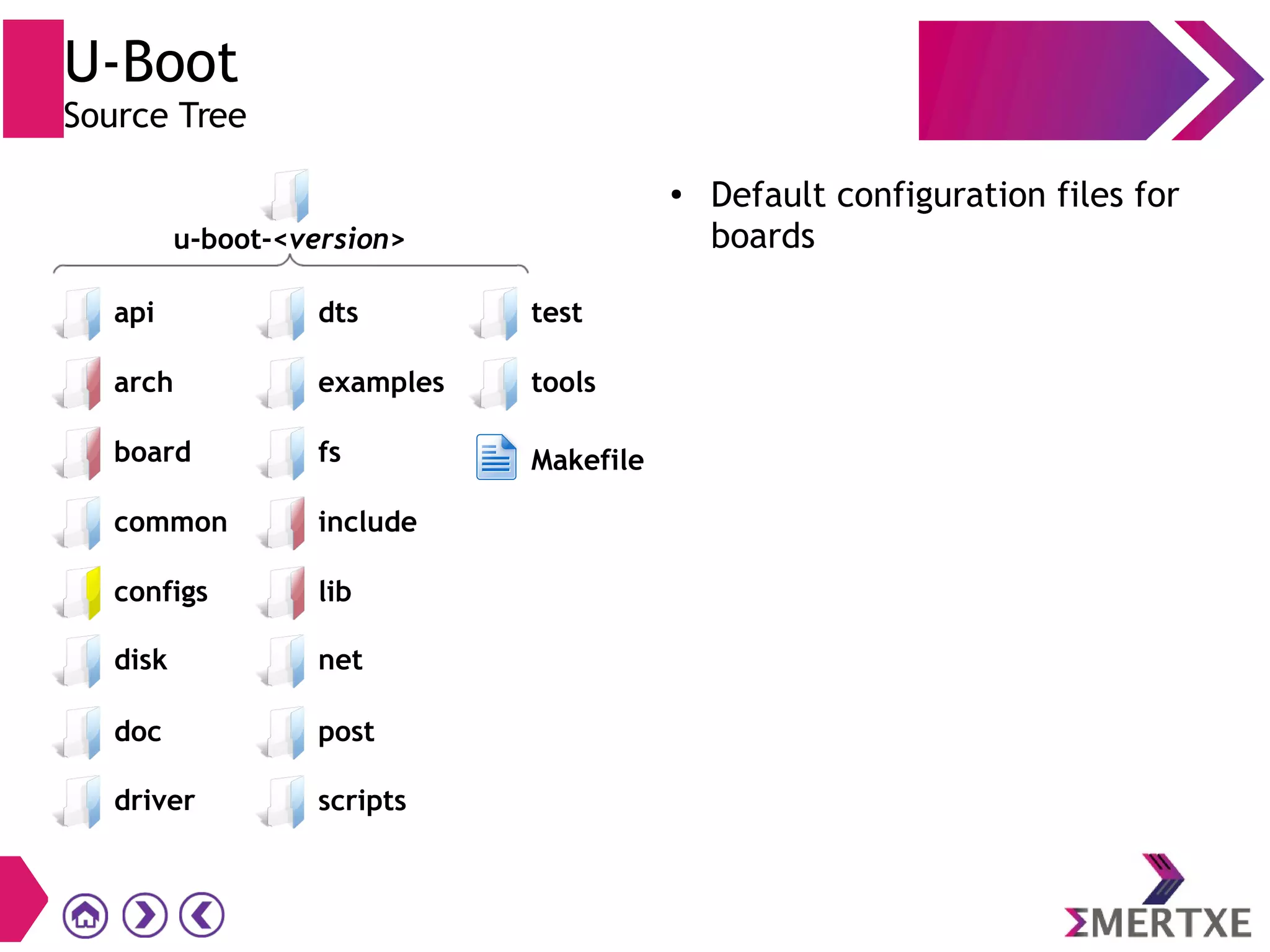
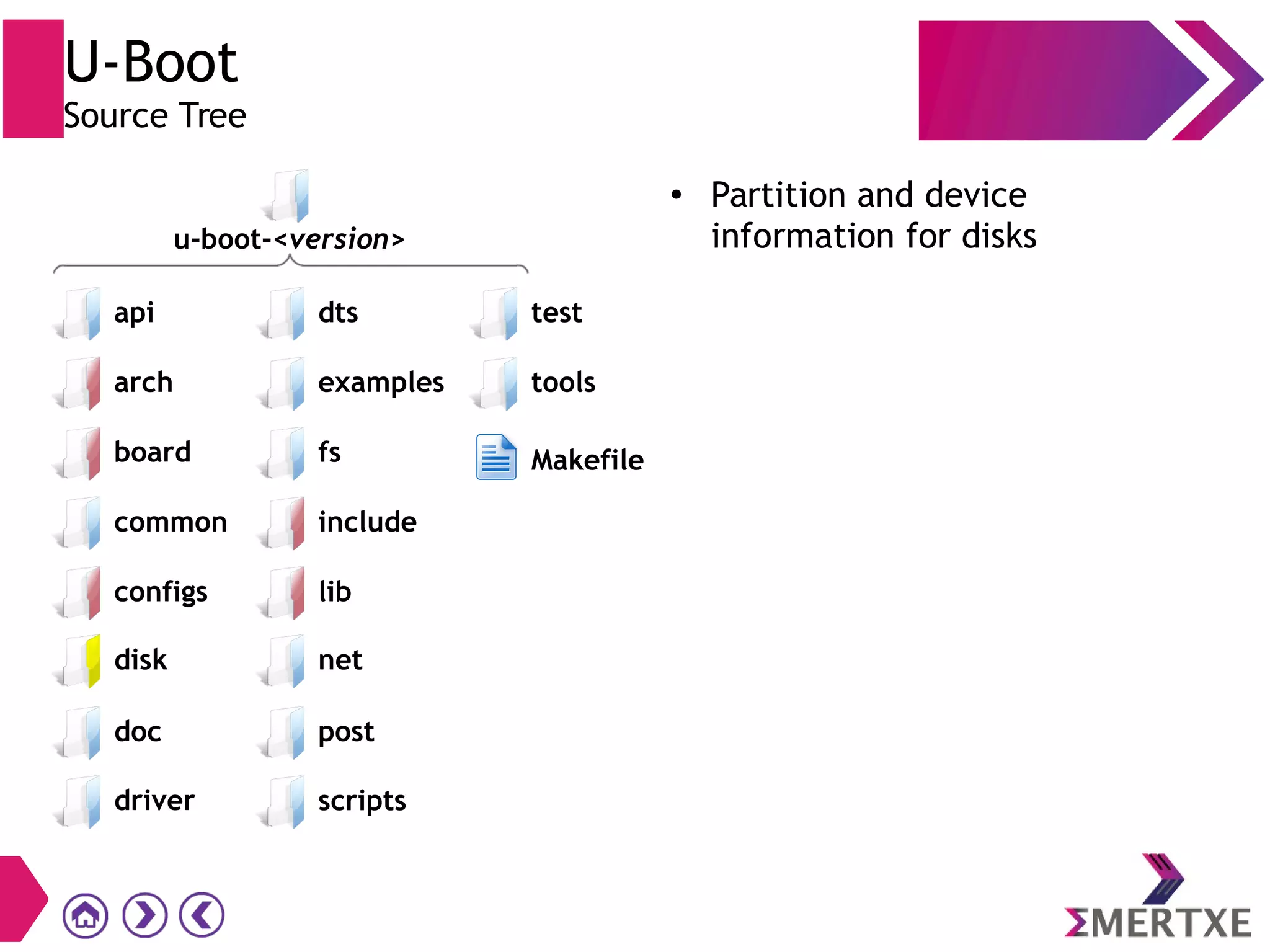
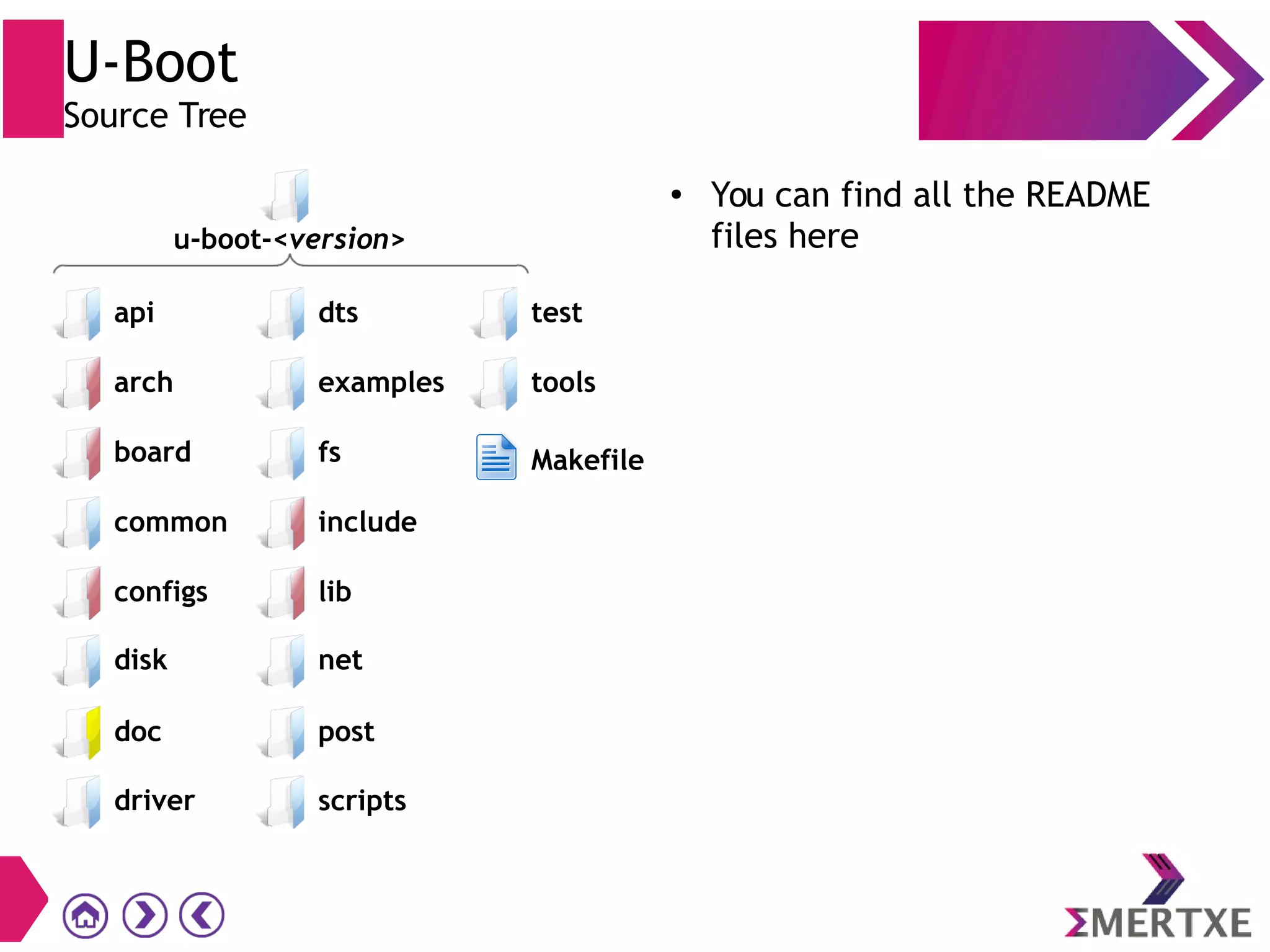
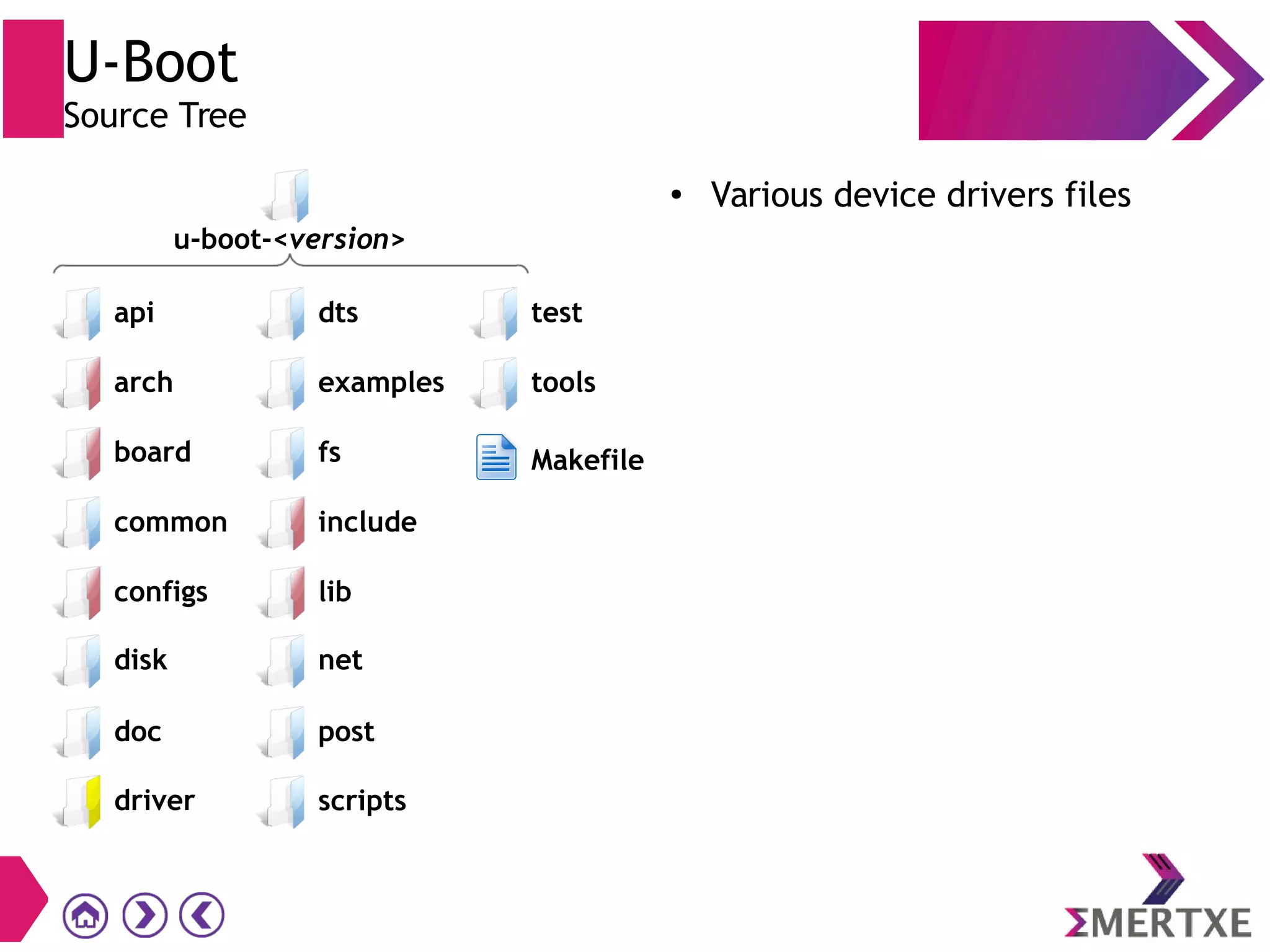
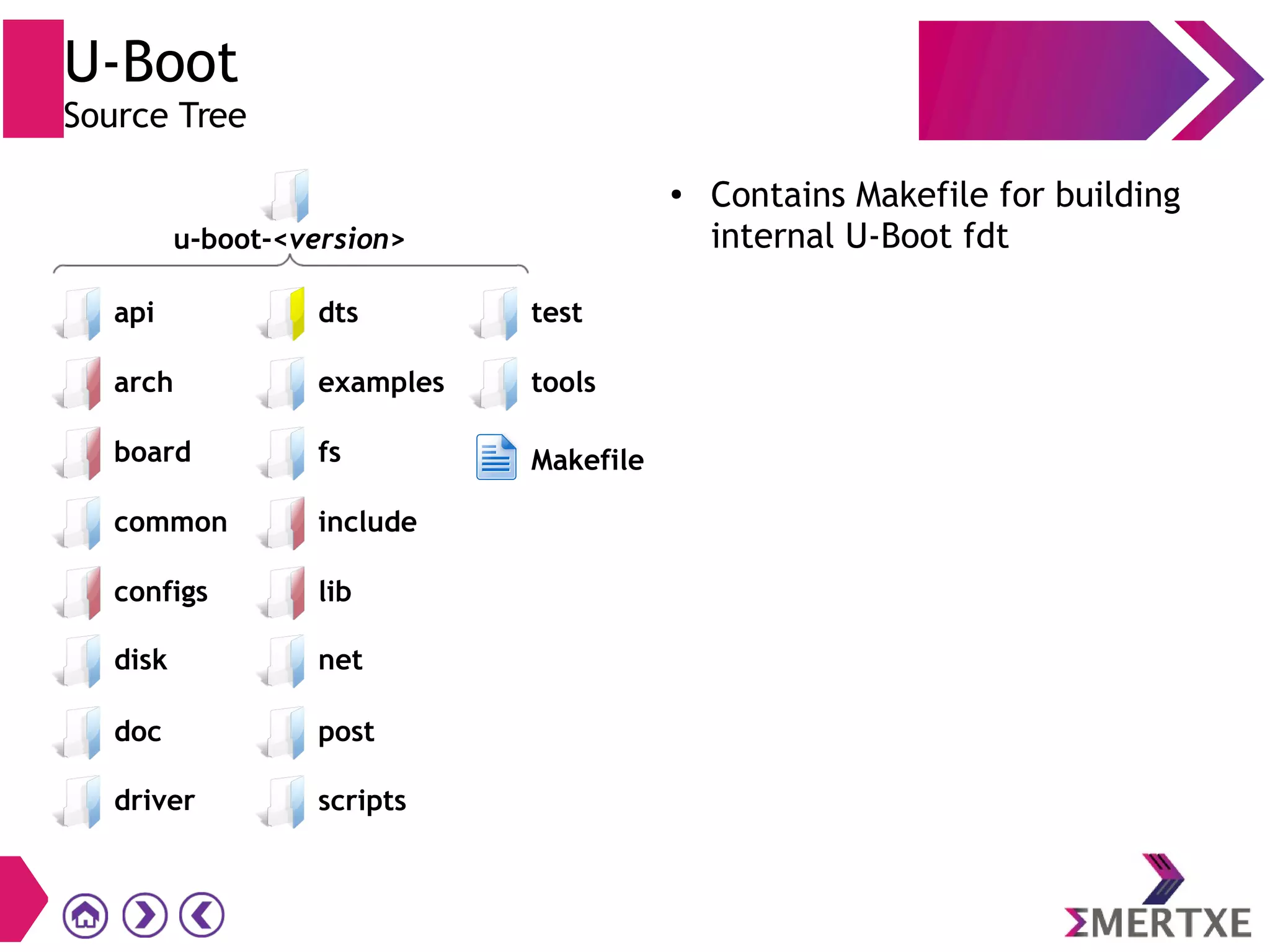
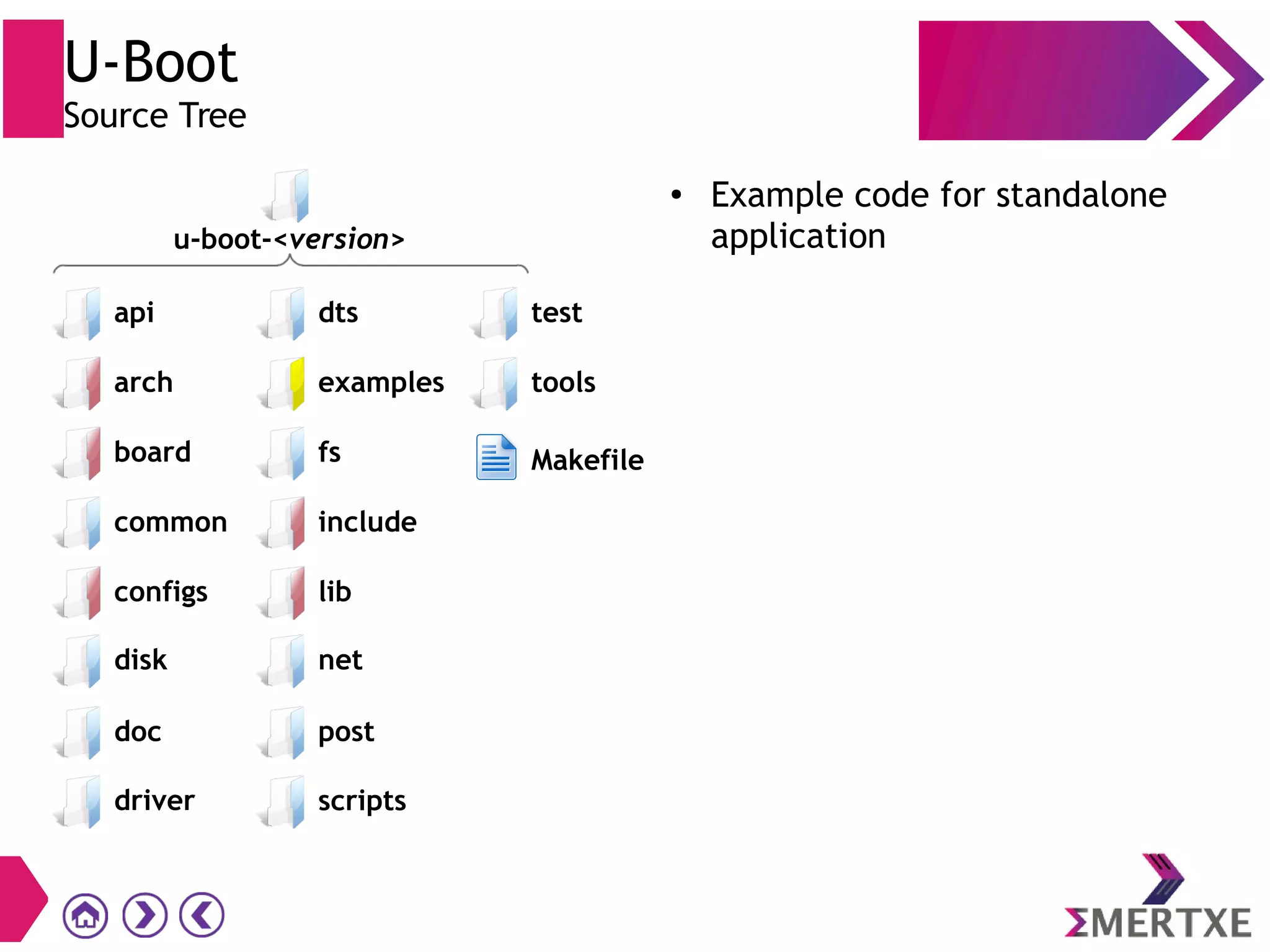
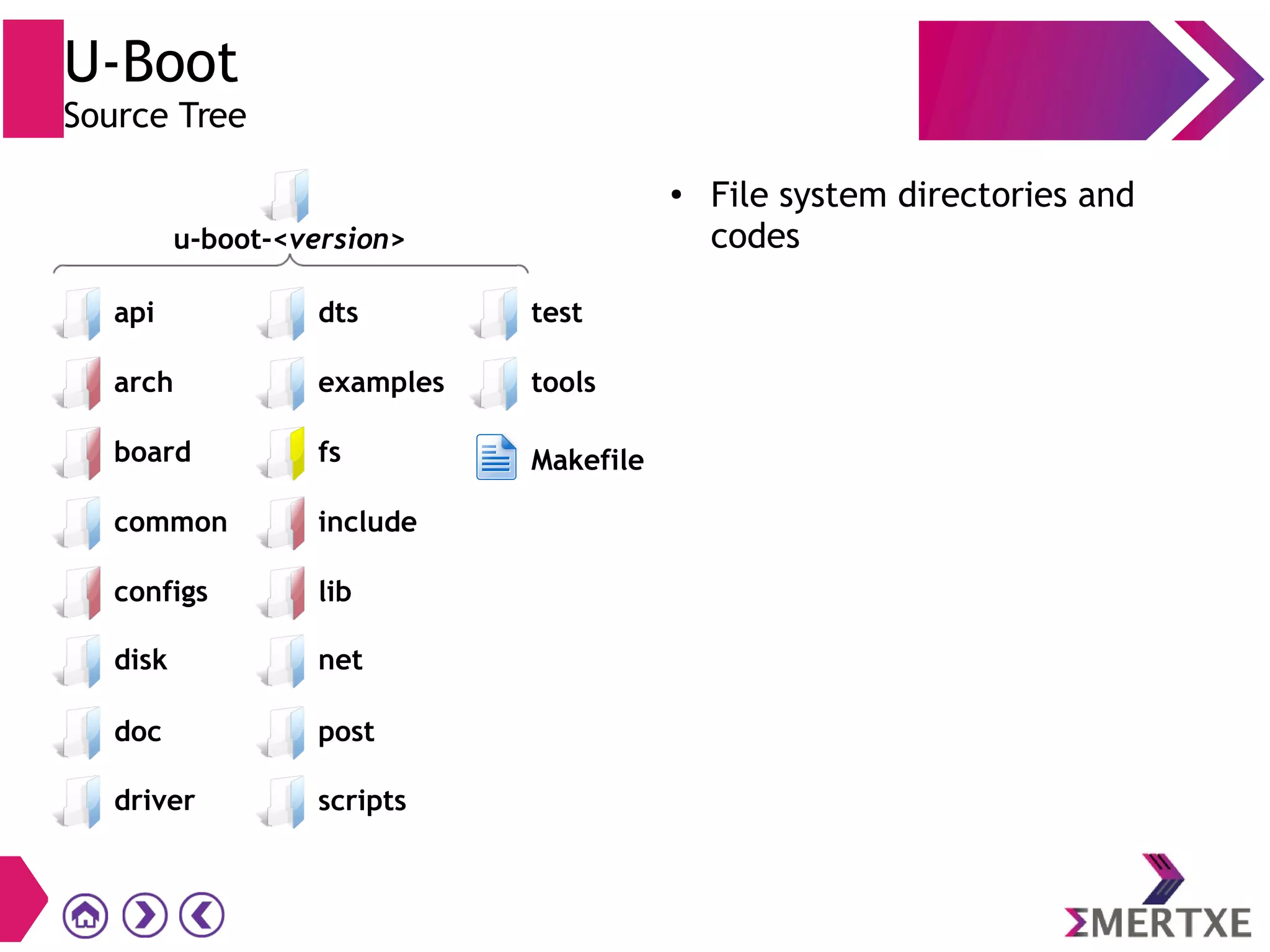
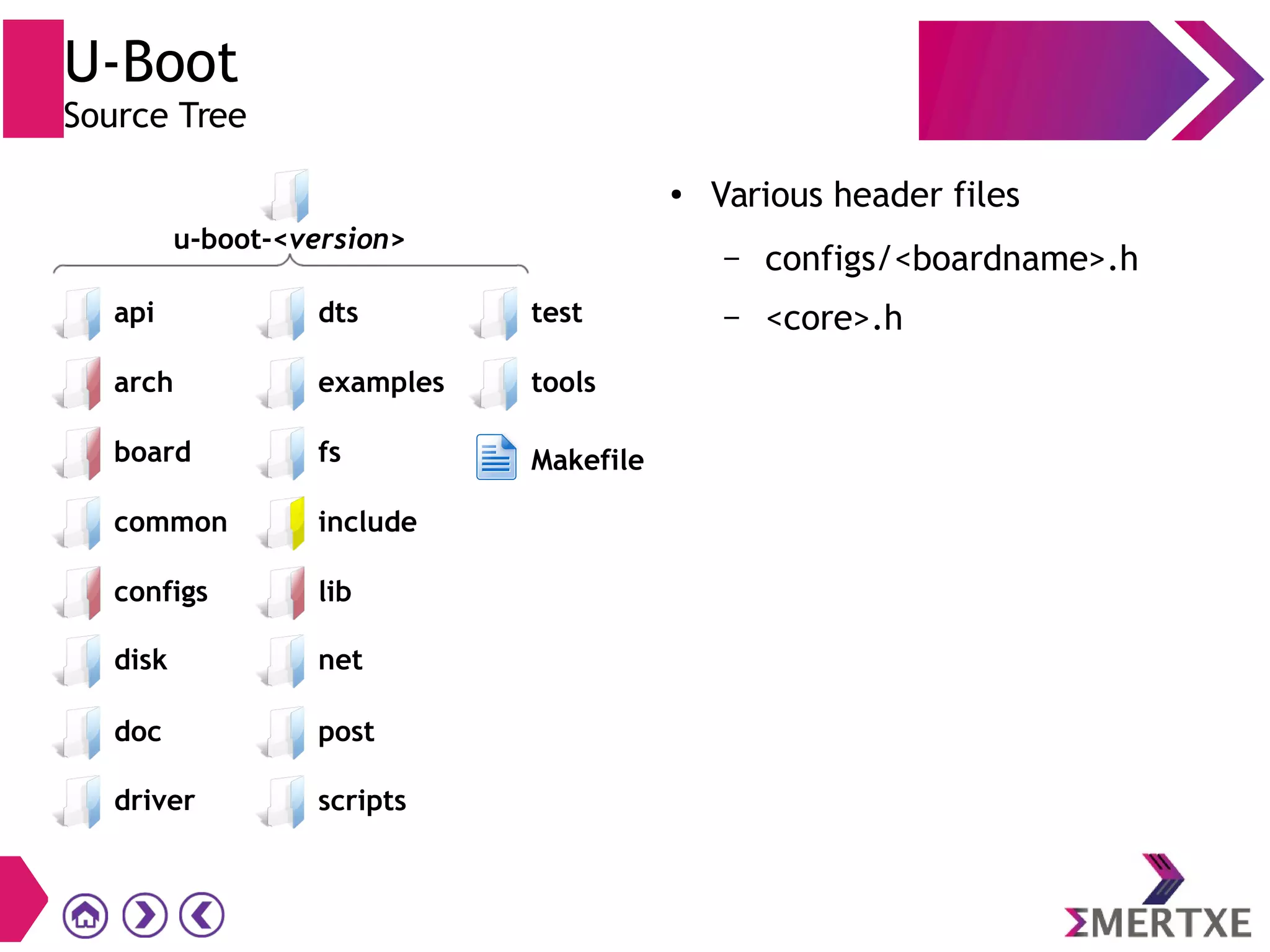
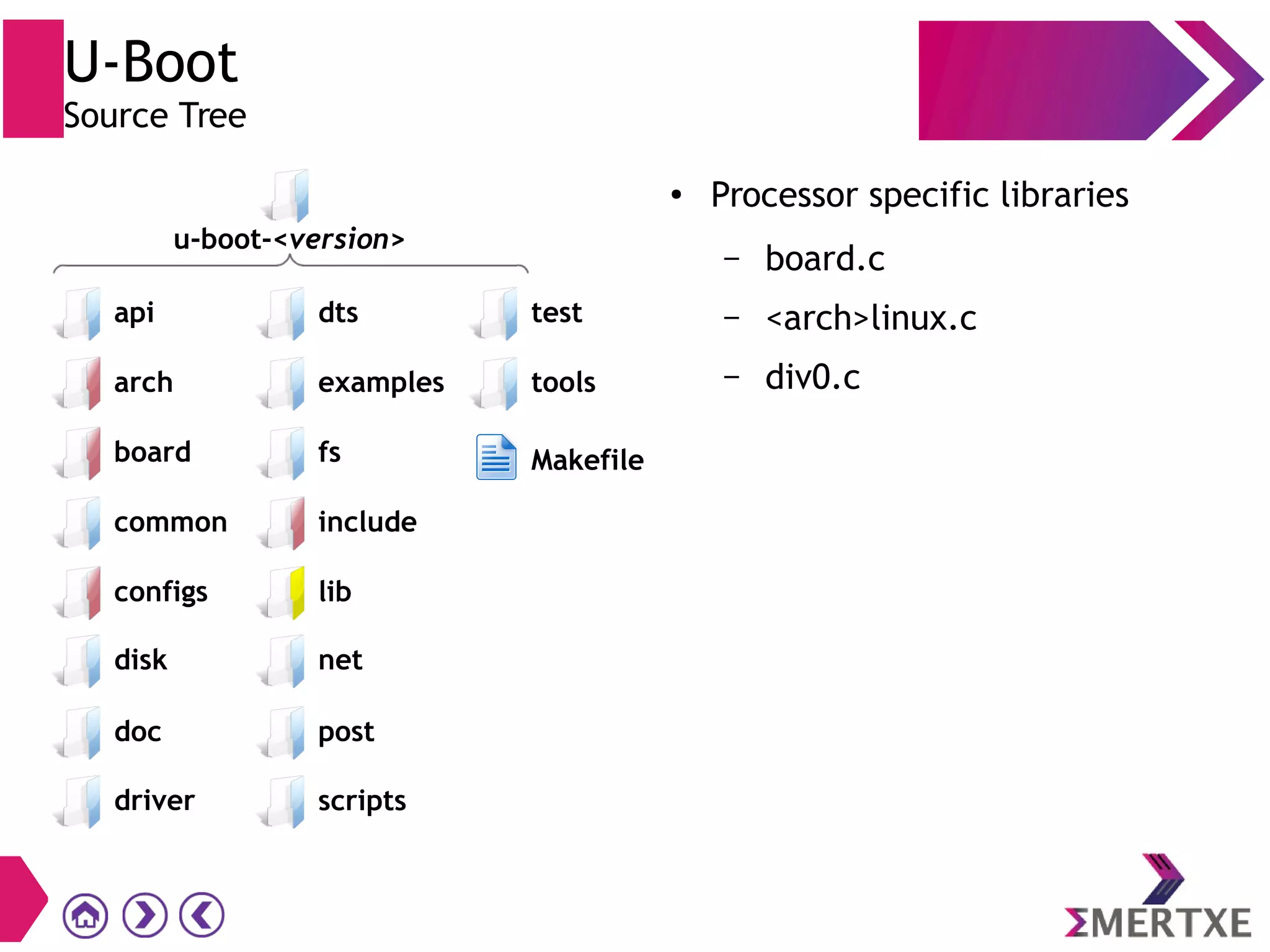
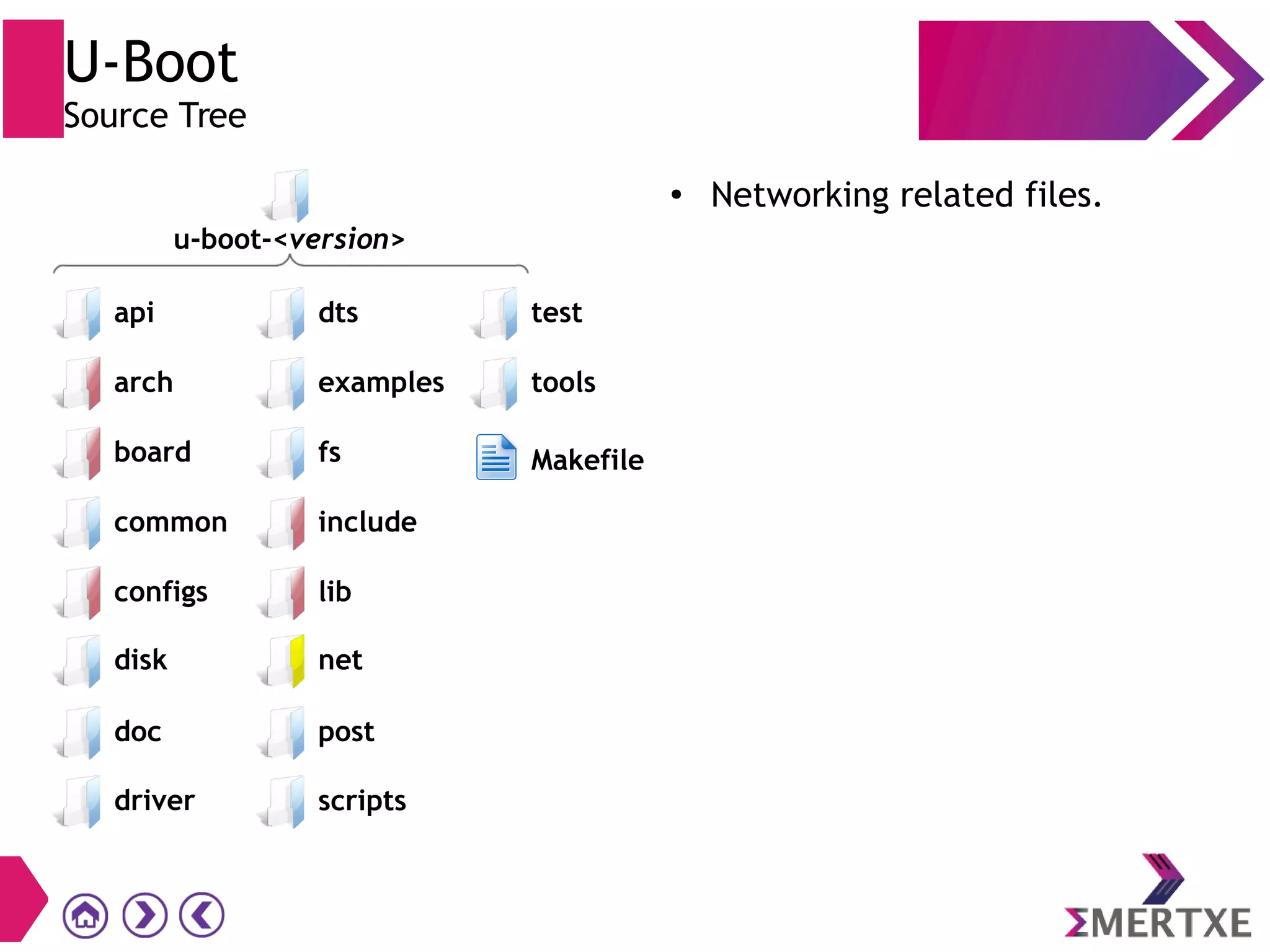
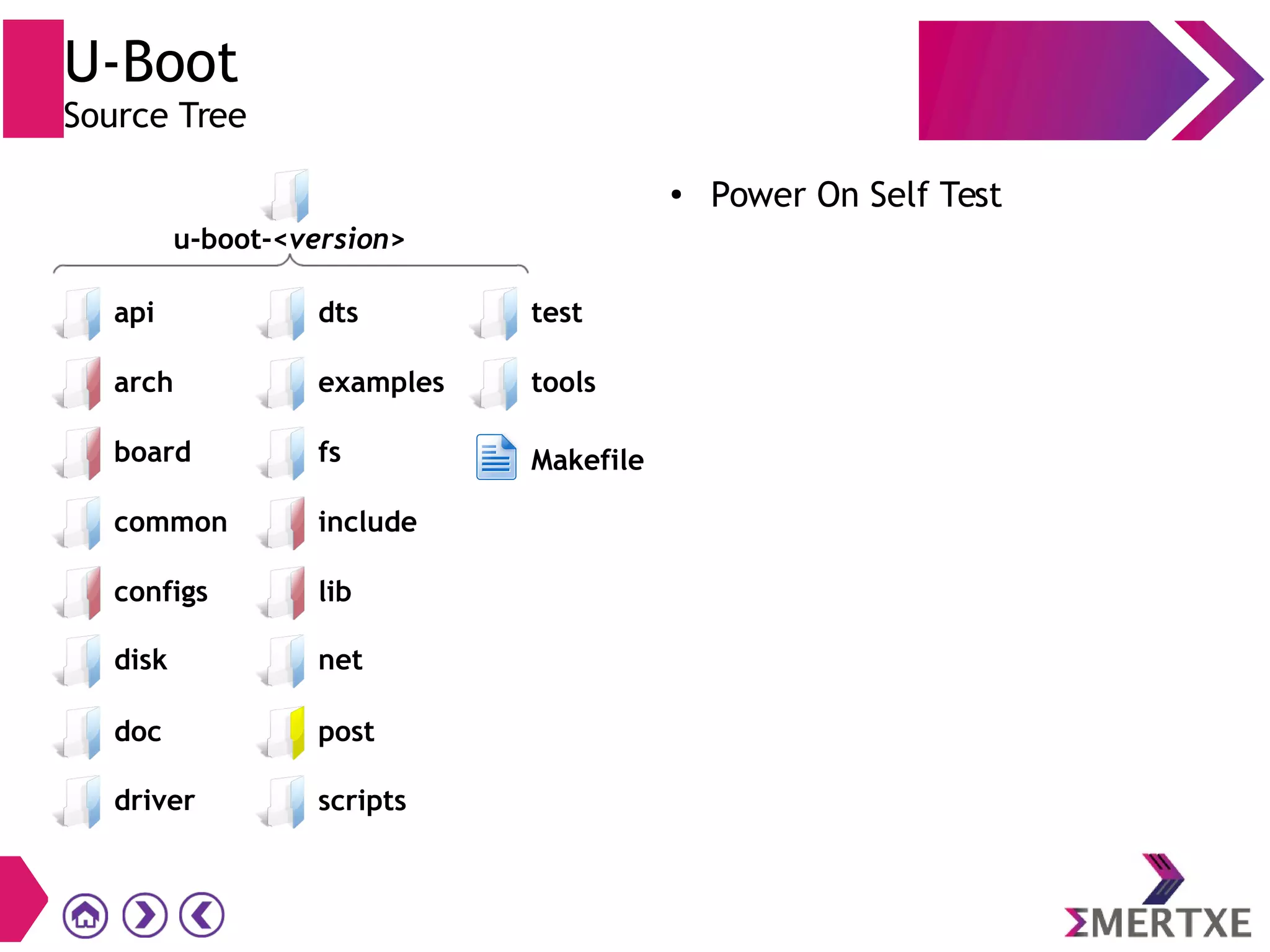
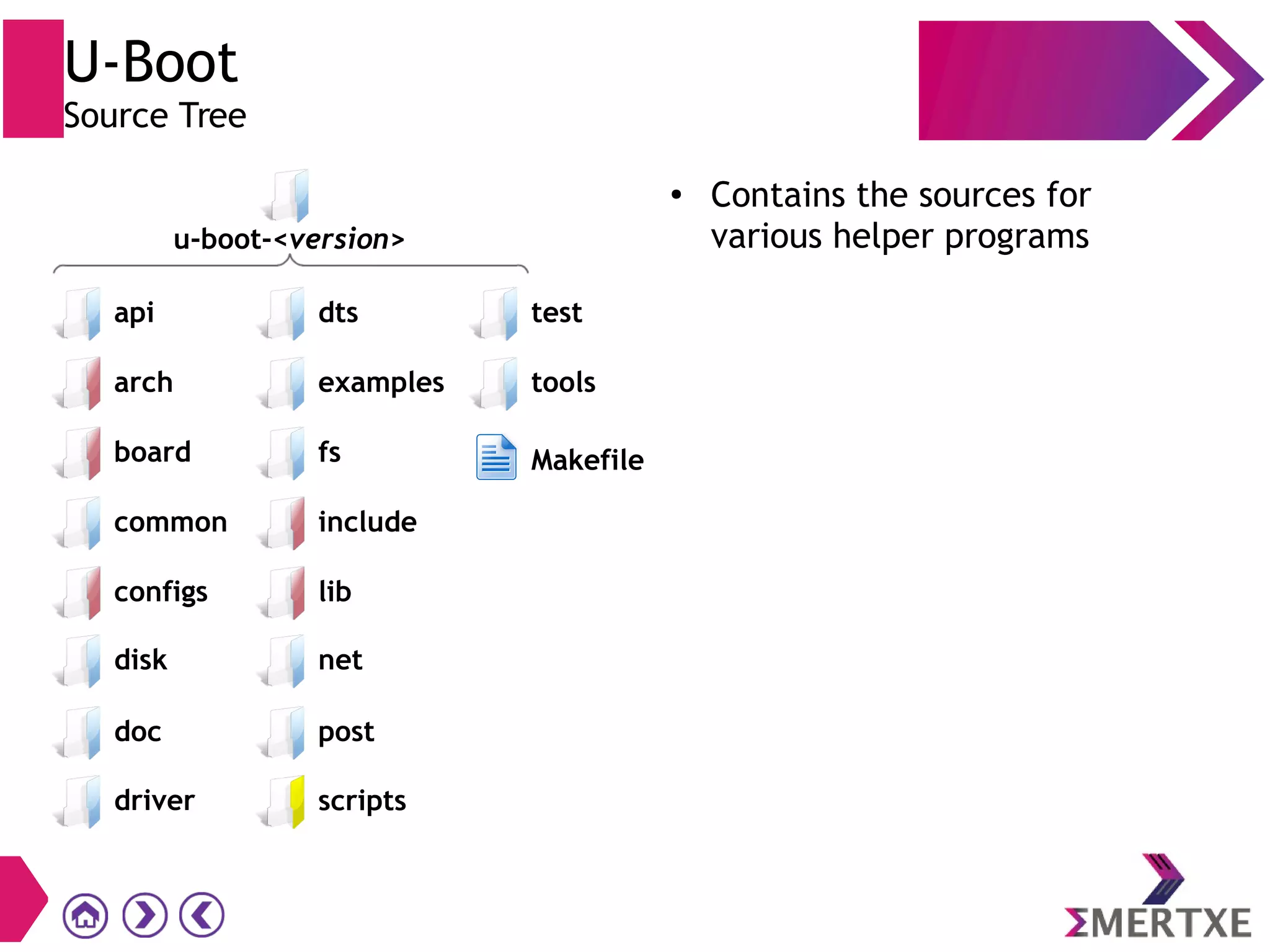
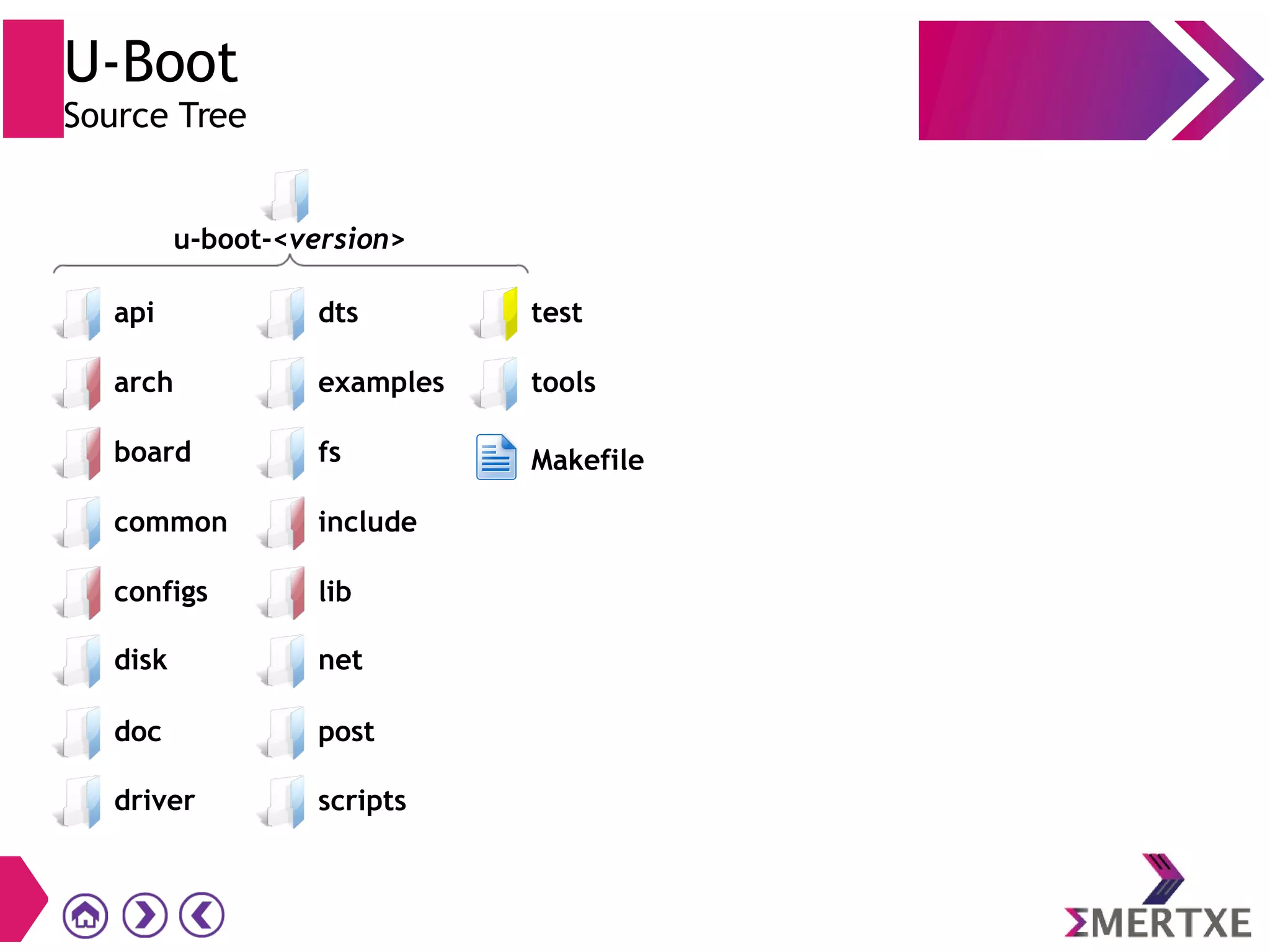
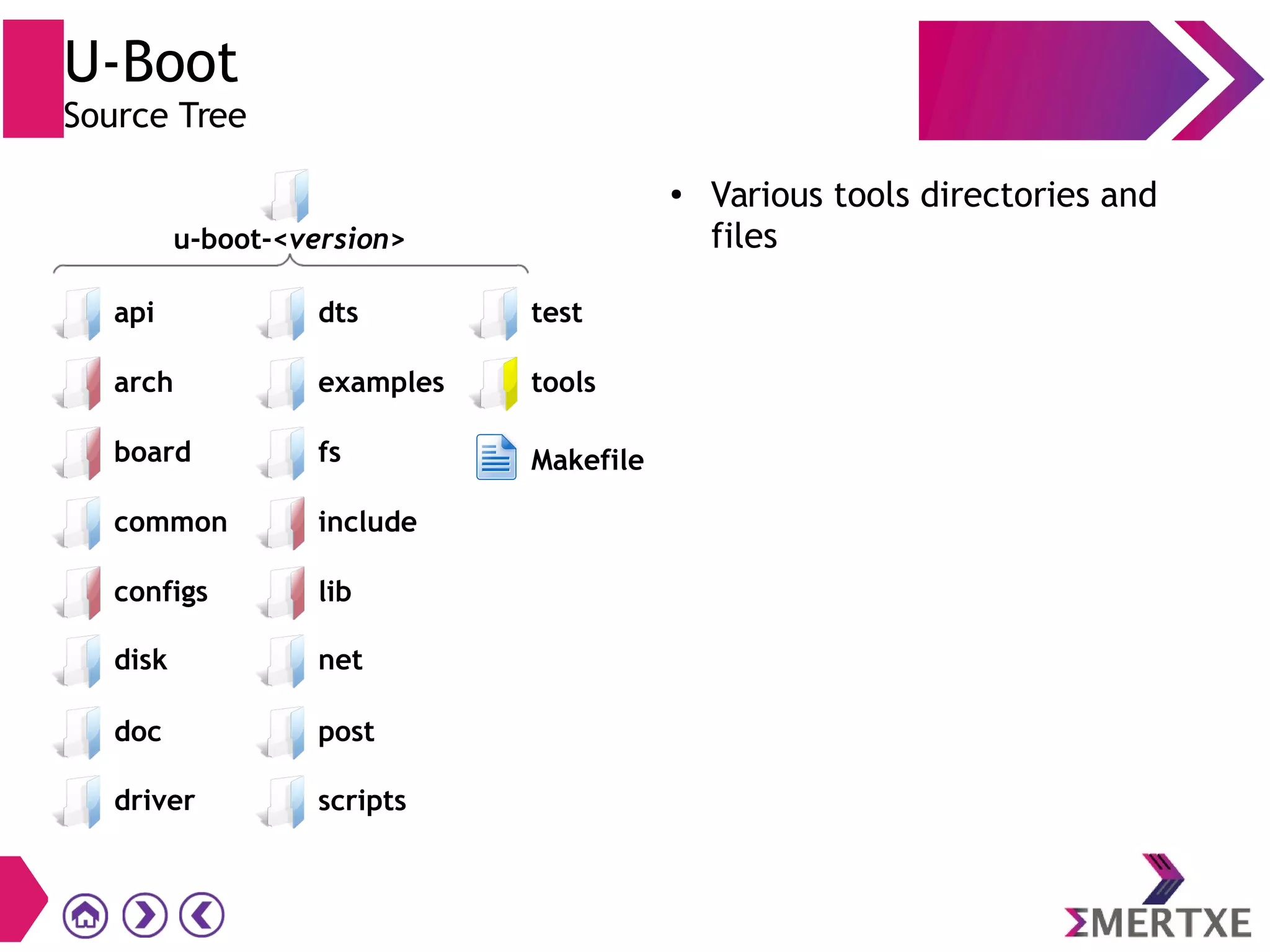
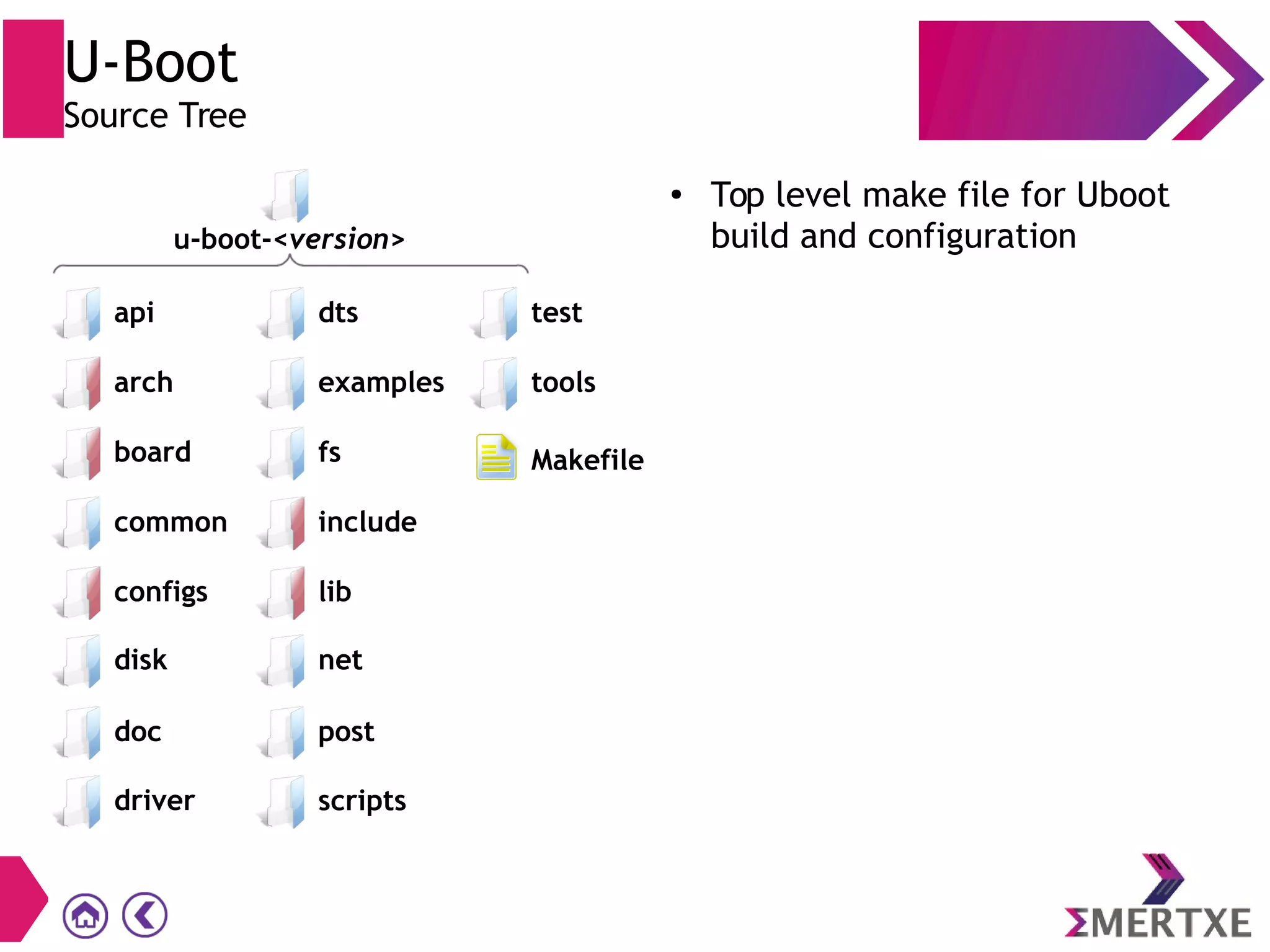
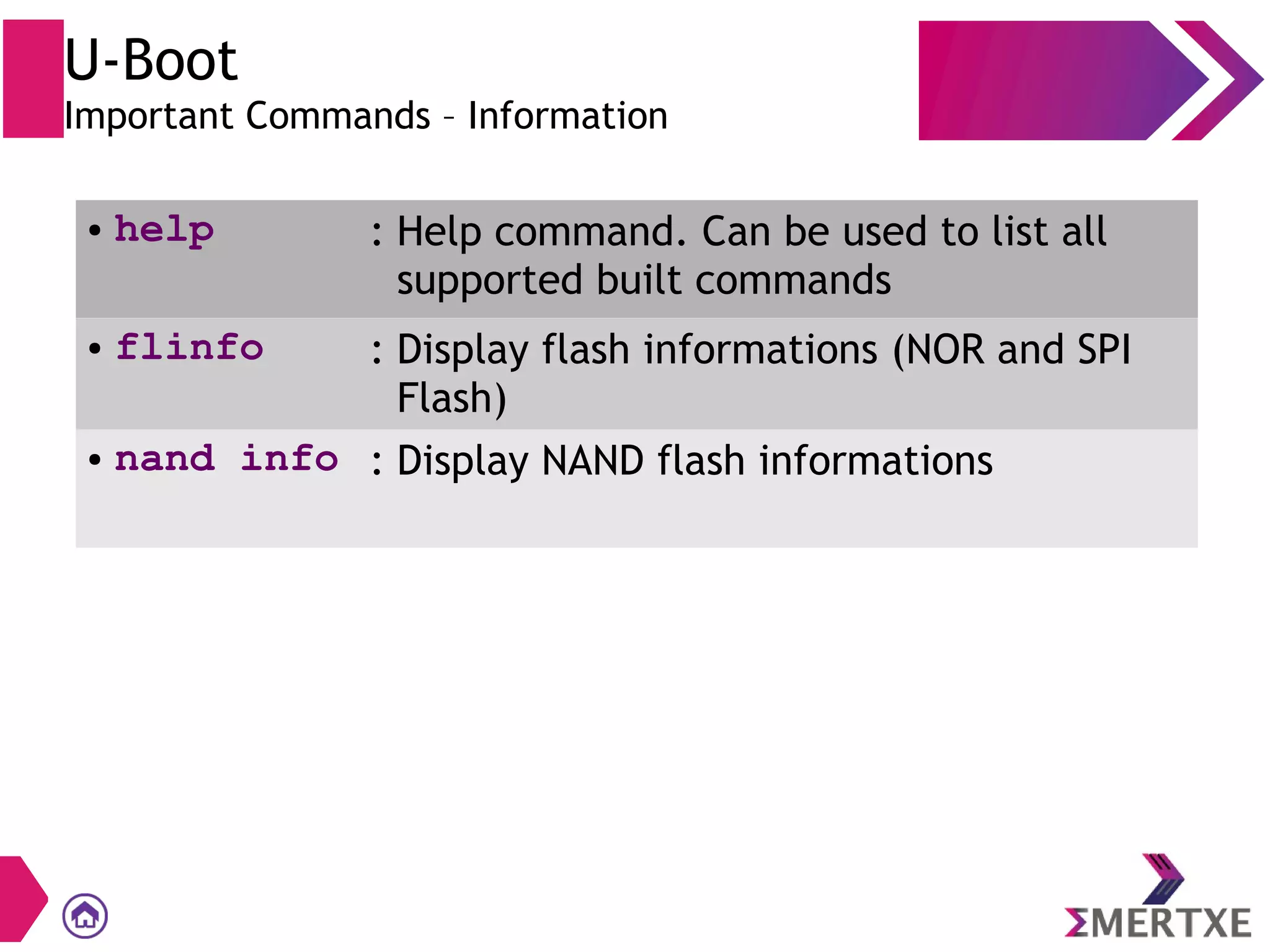
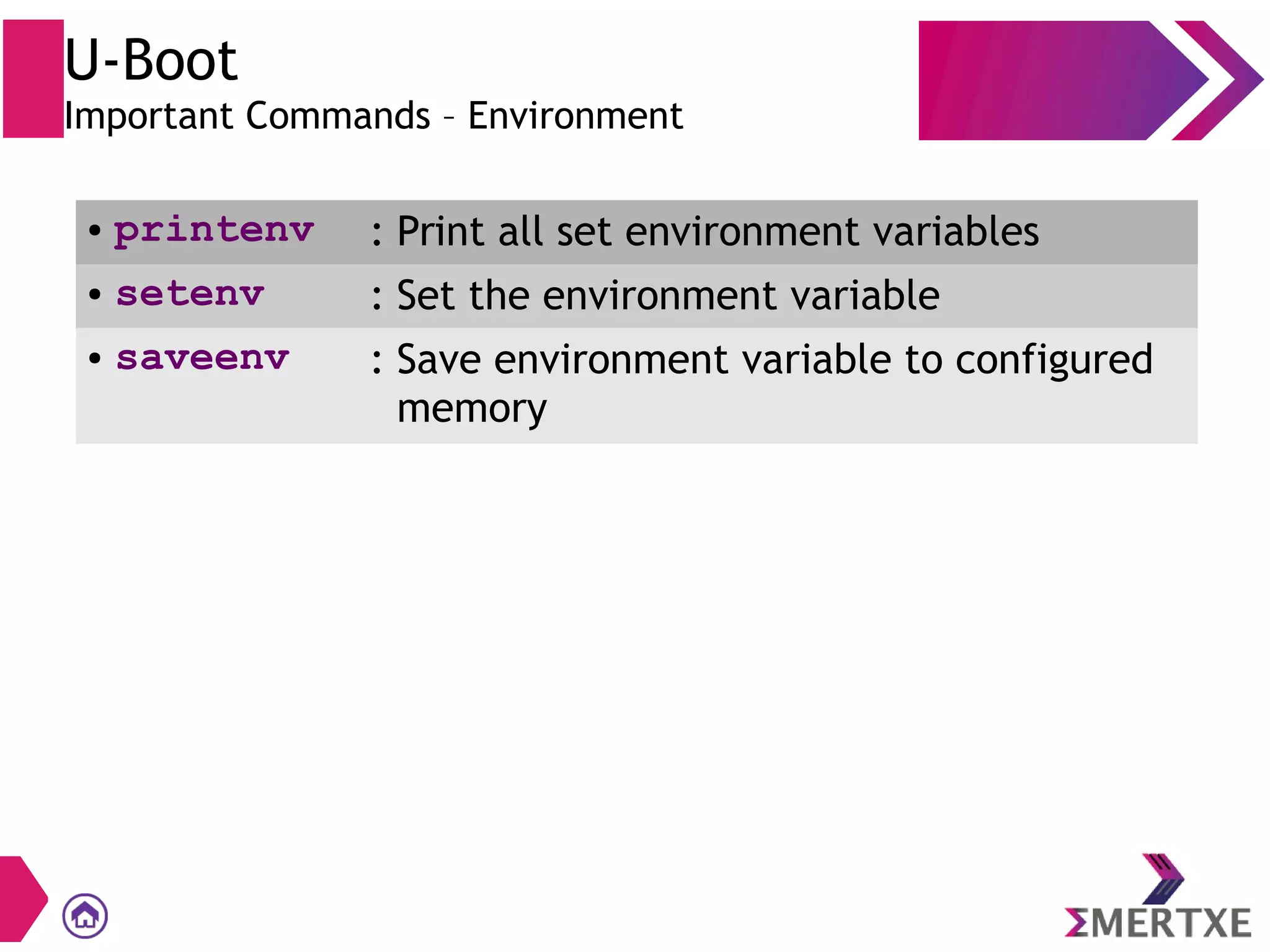
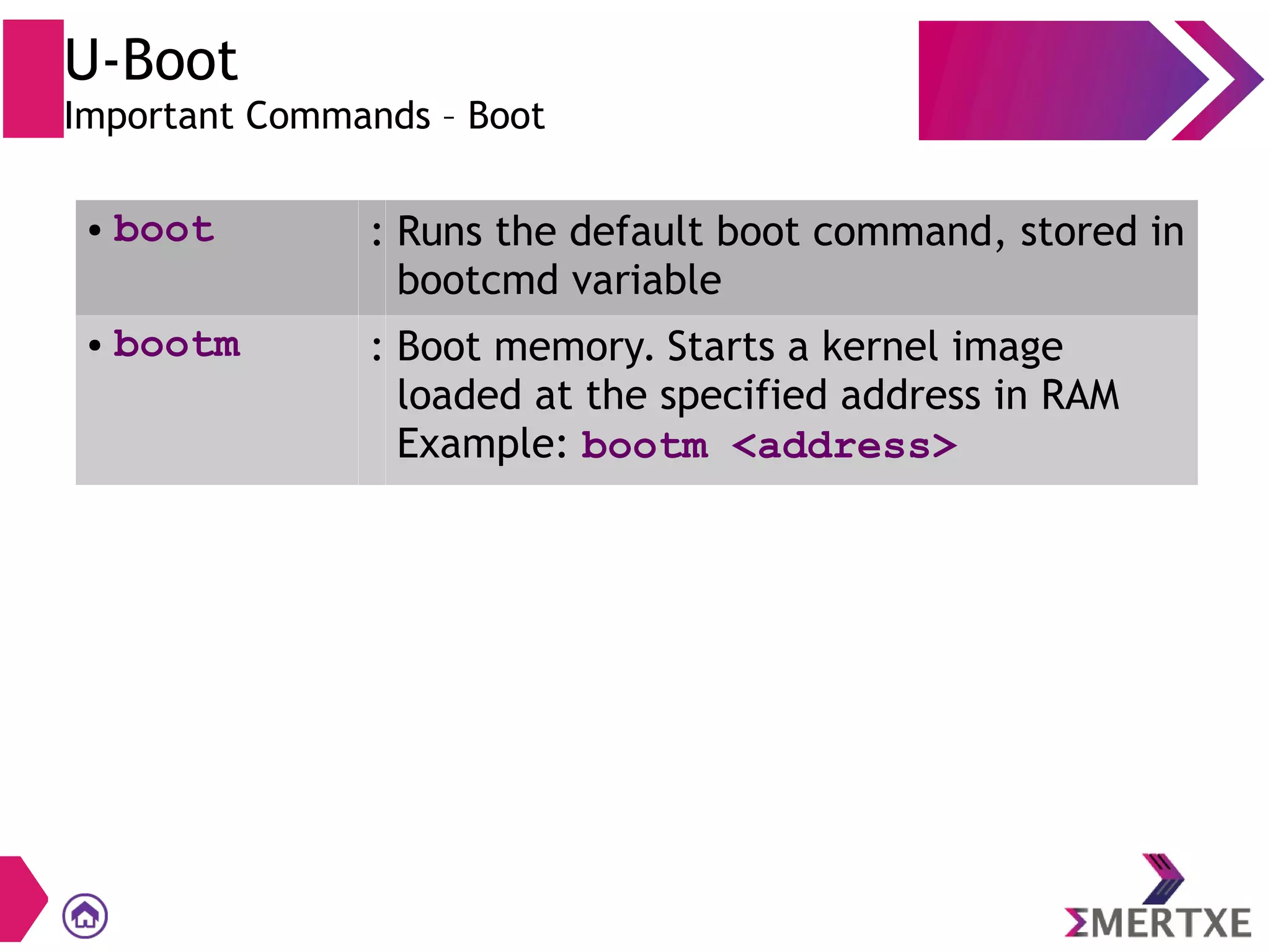
Explanation of the booting sequence for an embedded Linux system, including various boot stages, boot loaders, and the controller's boot process.Introduction to U-Boot, its architecture, functionality, and the details of its directory structure necessary for booting embedded Linux.
Step-by-step instructions on configuring, building, and using U-Boot bootloader for embedded Linux systems.
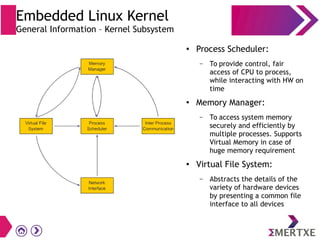
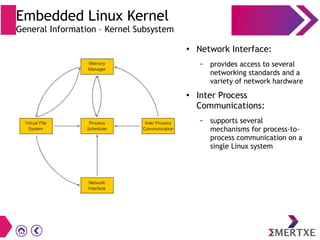
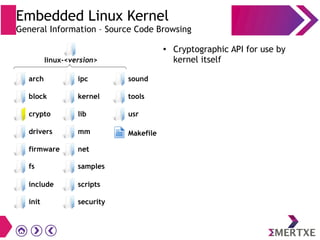
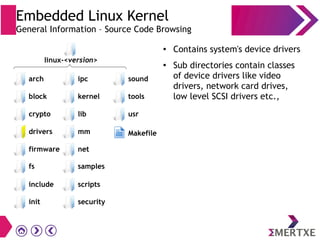
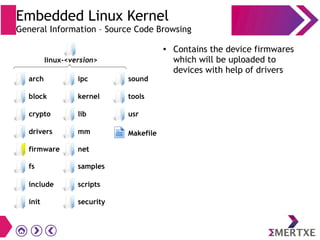
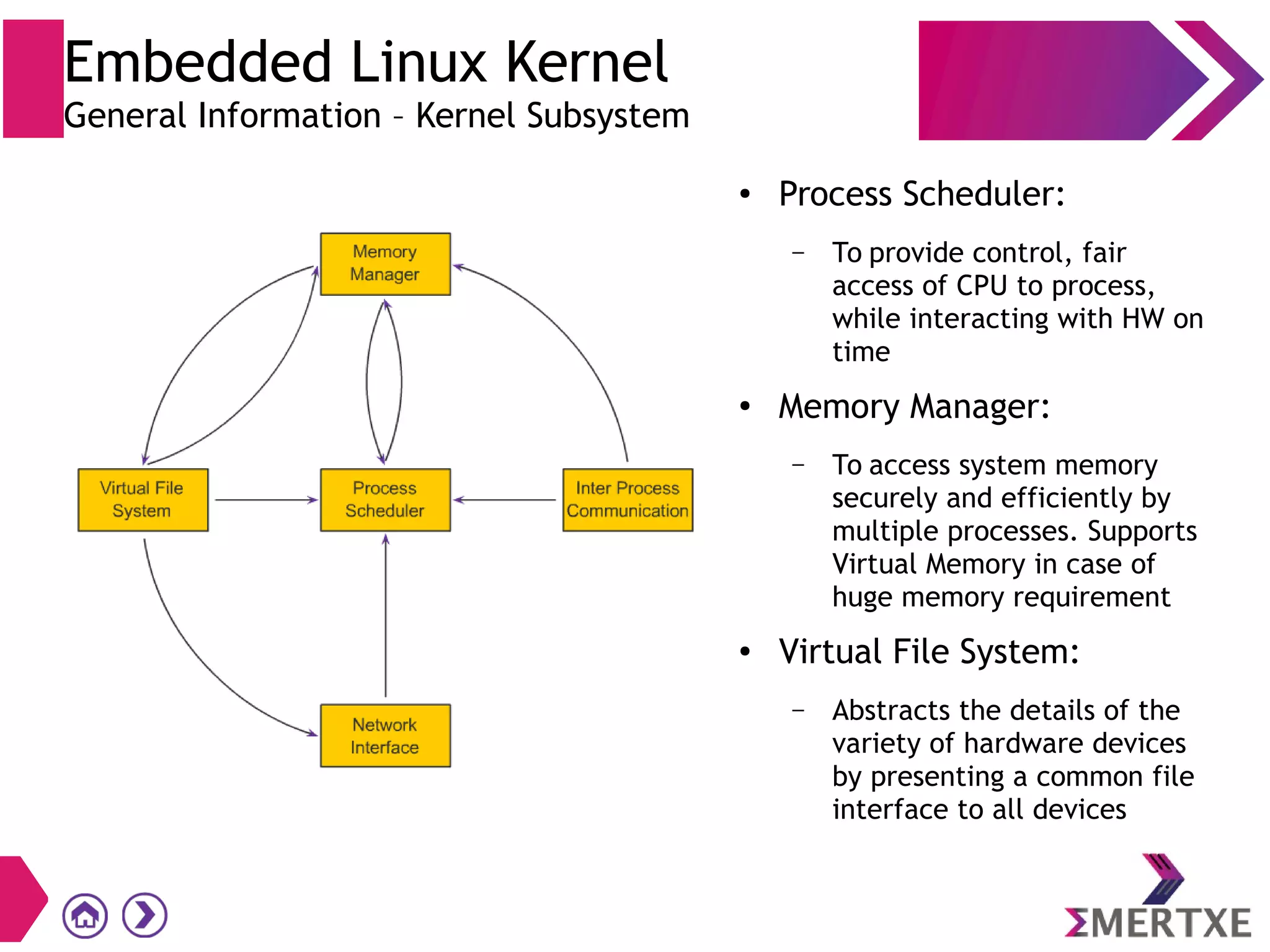
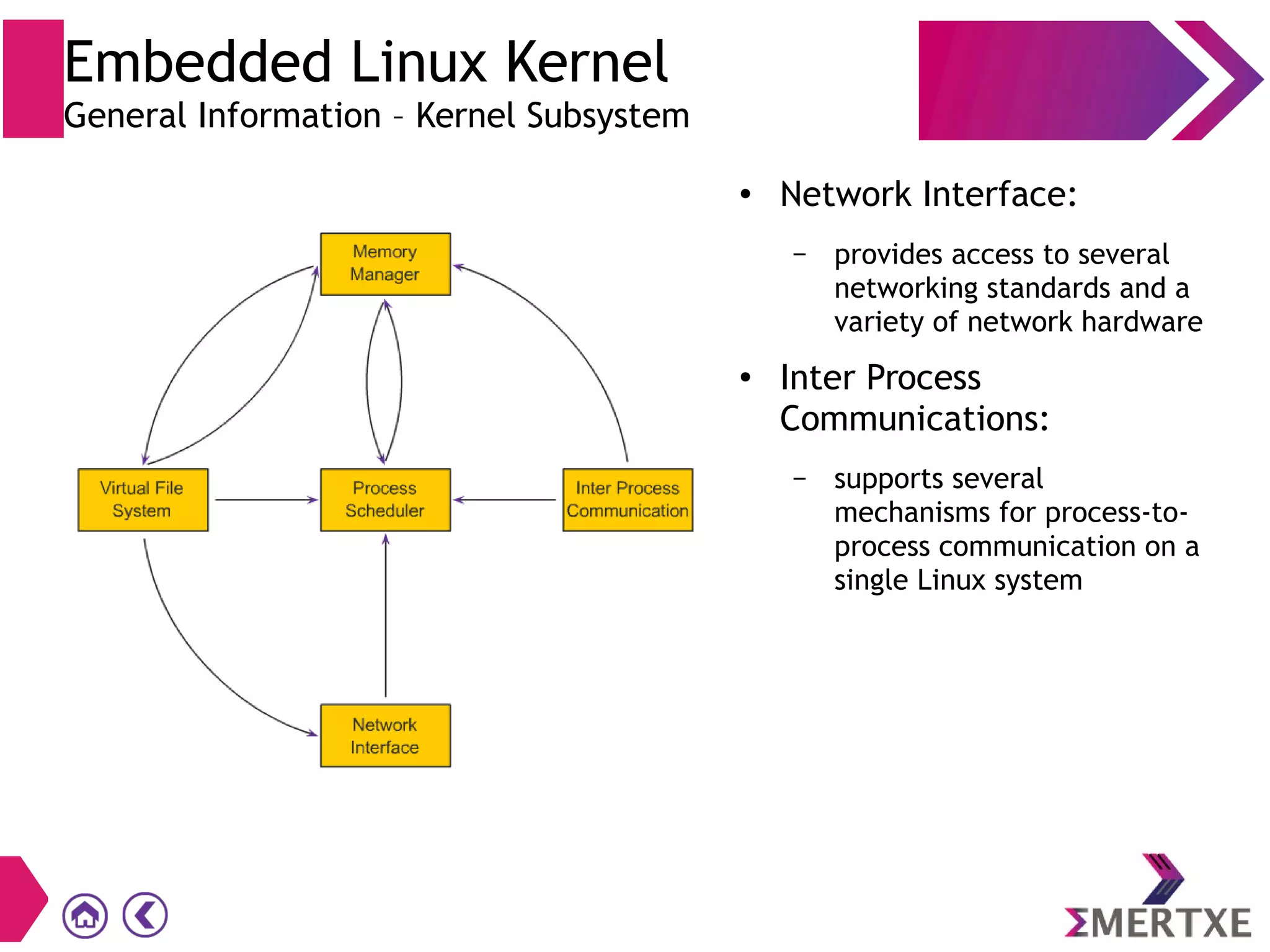
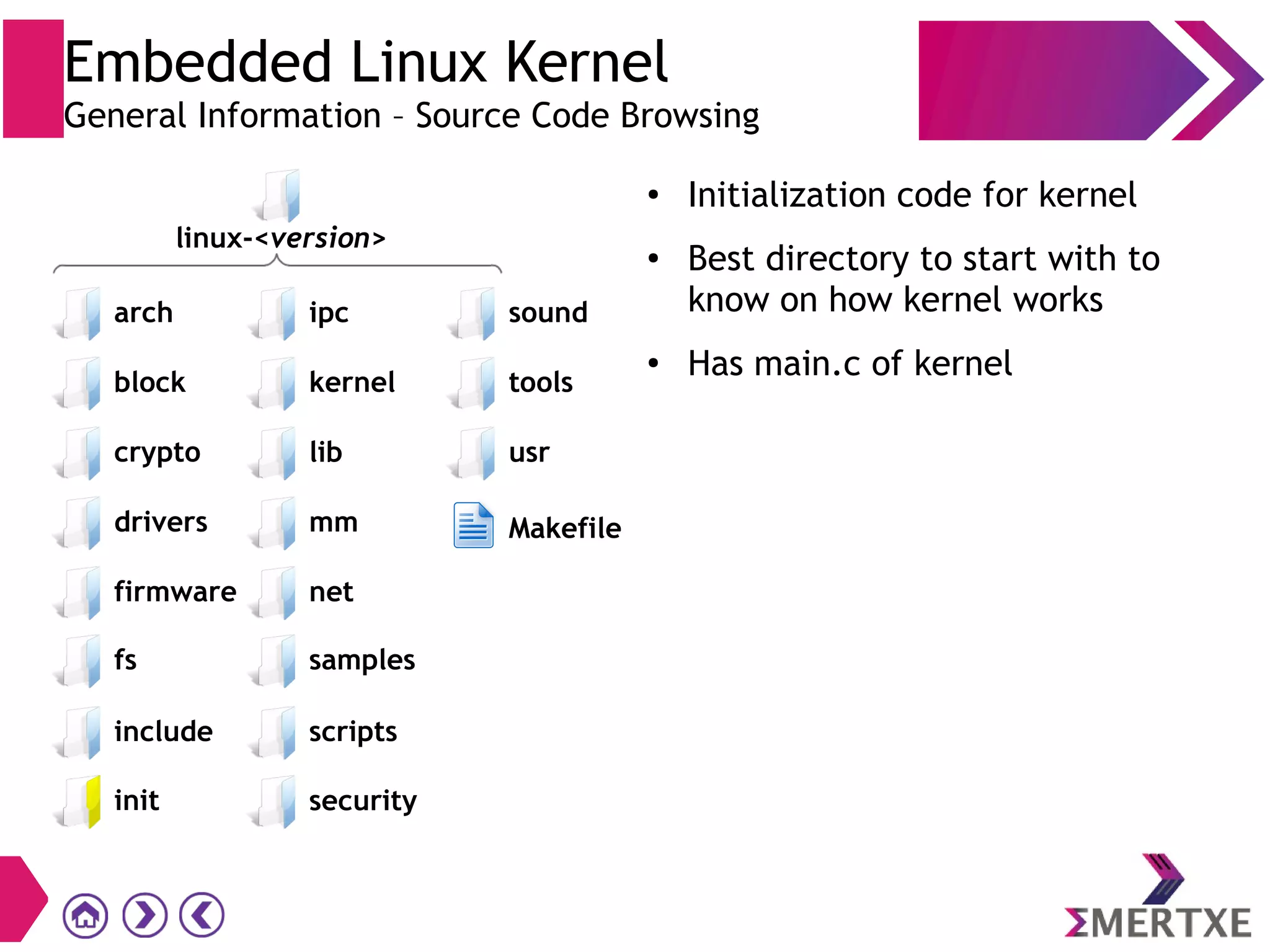
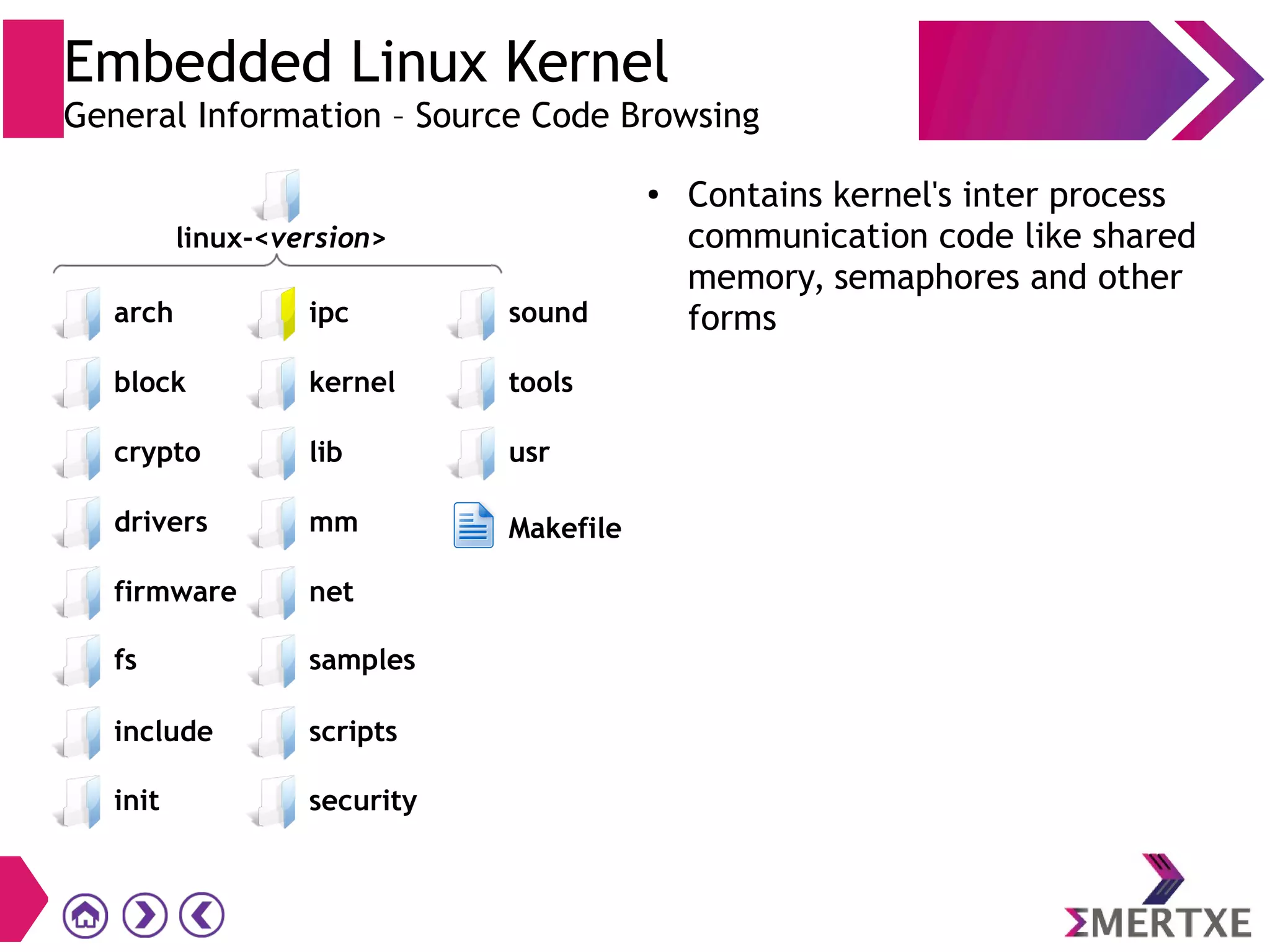
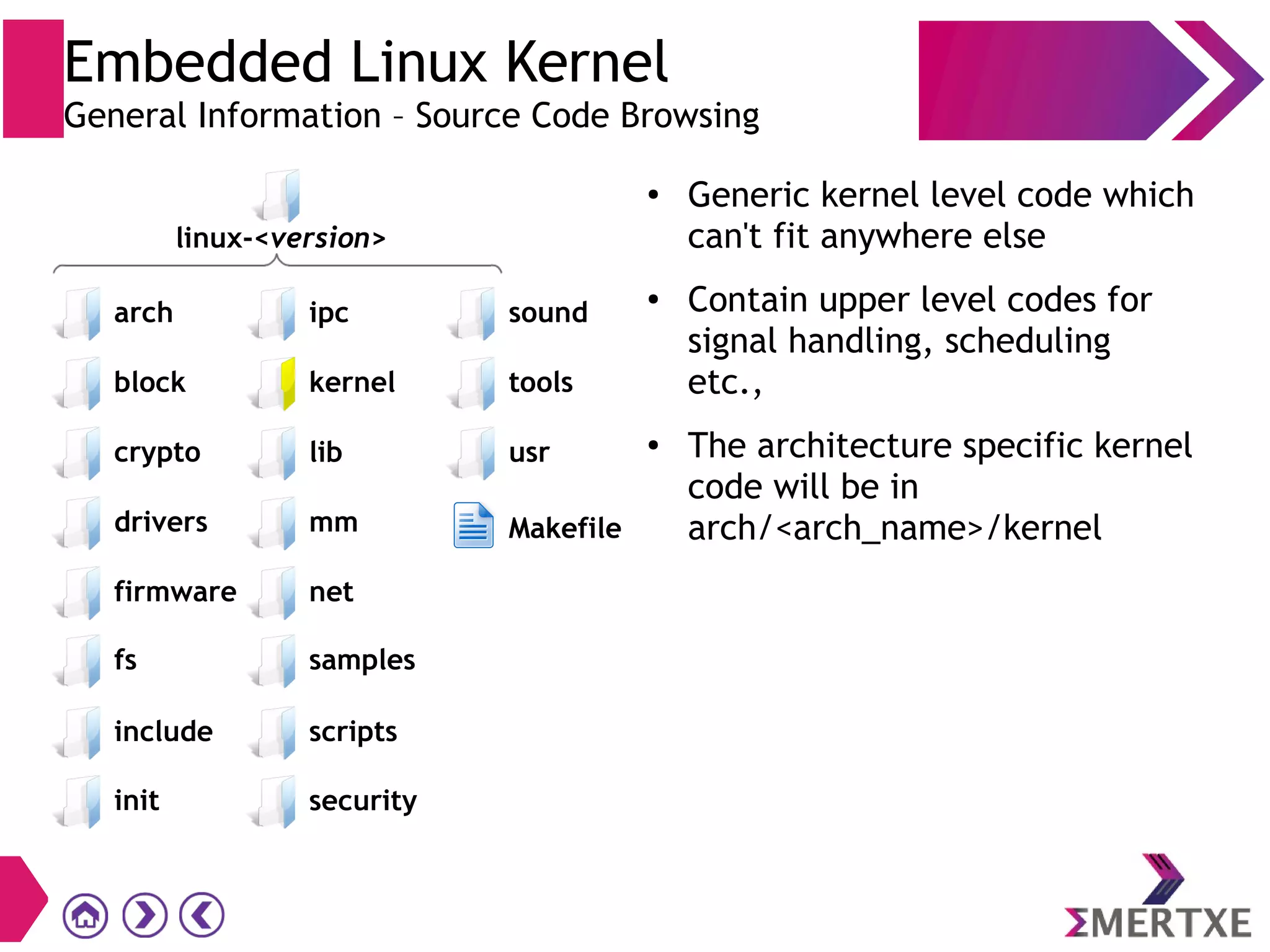
Introduction to the various subsystems of the Embedded Linux Kernel, including scheduling, memory management, and inter-process communication.
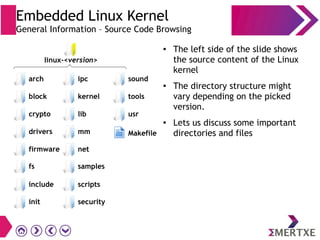
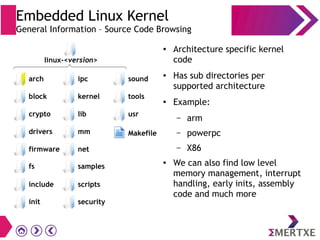
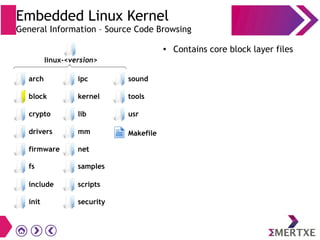
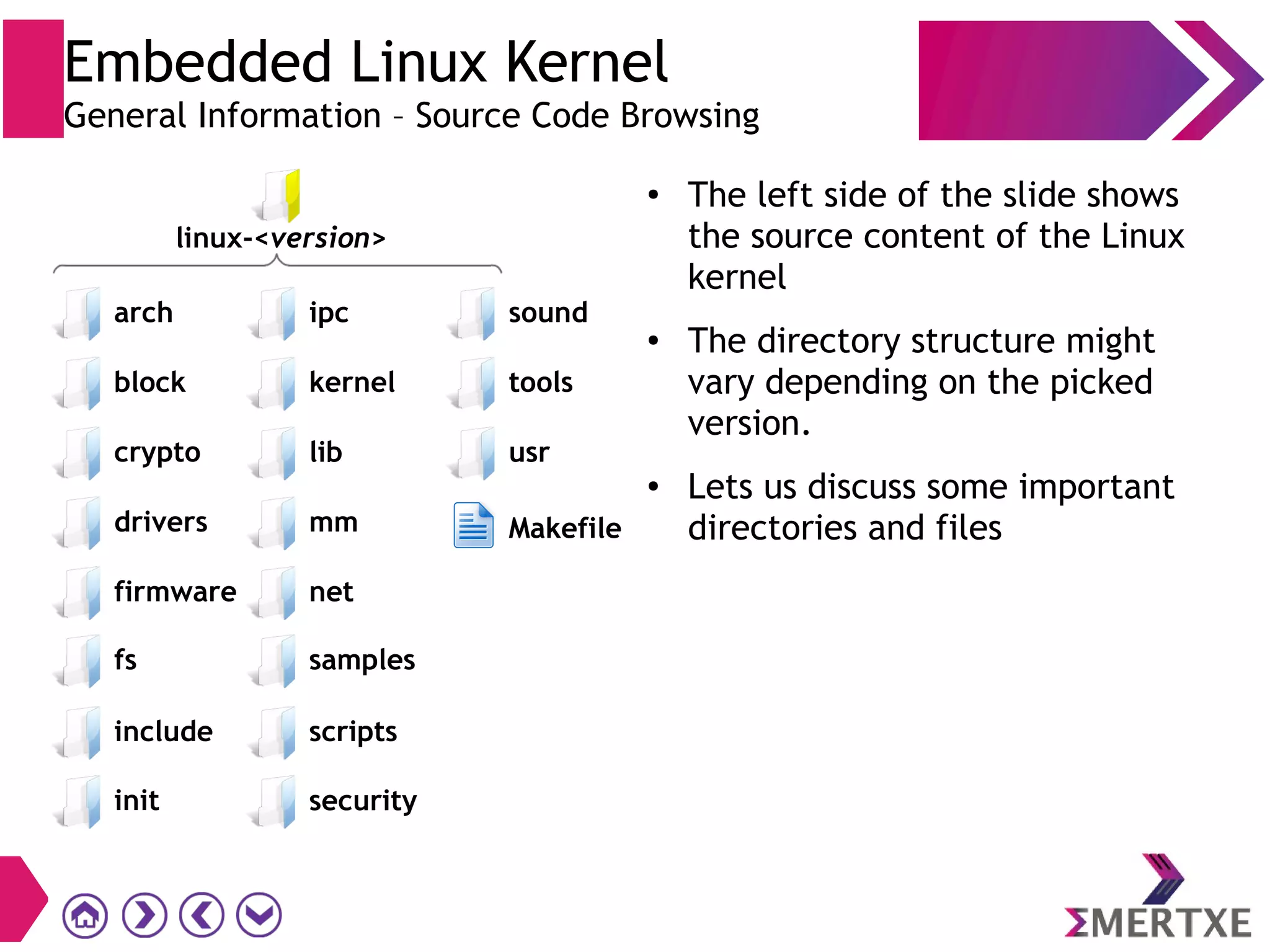
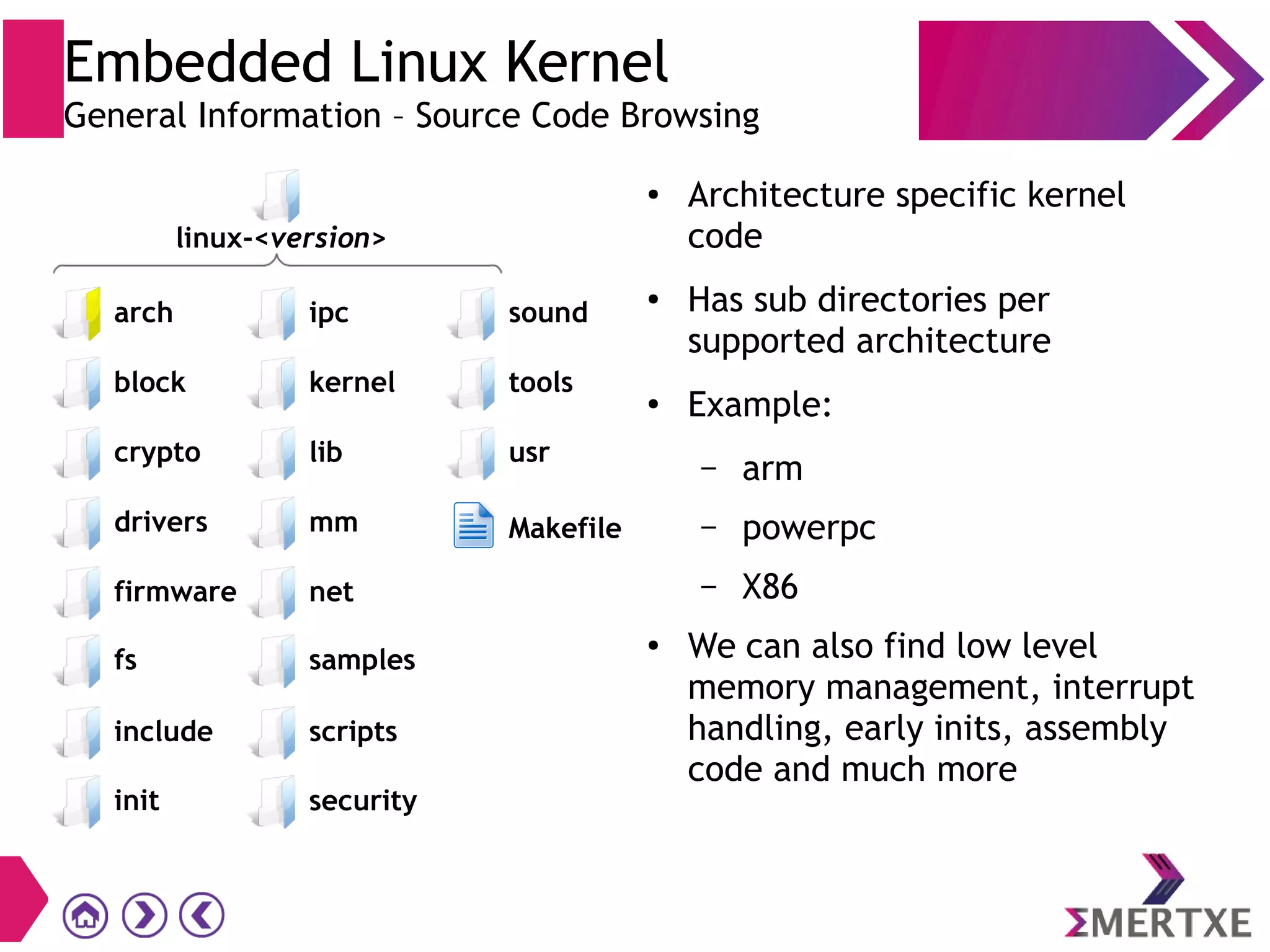
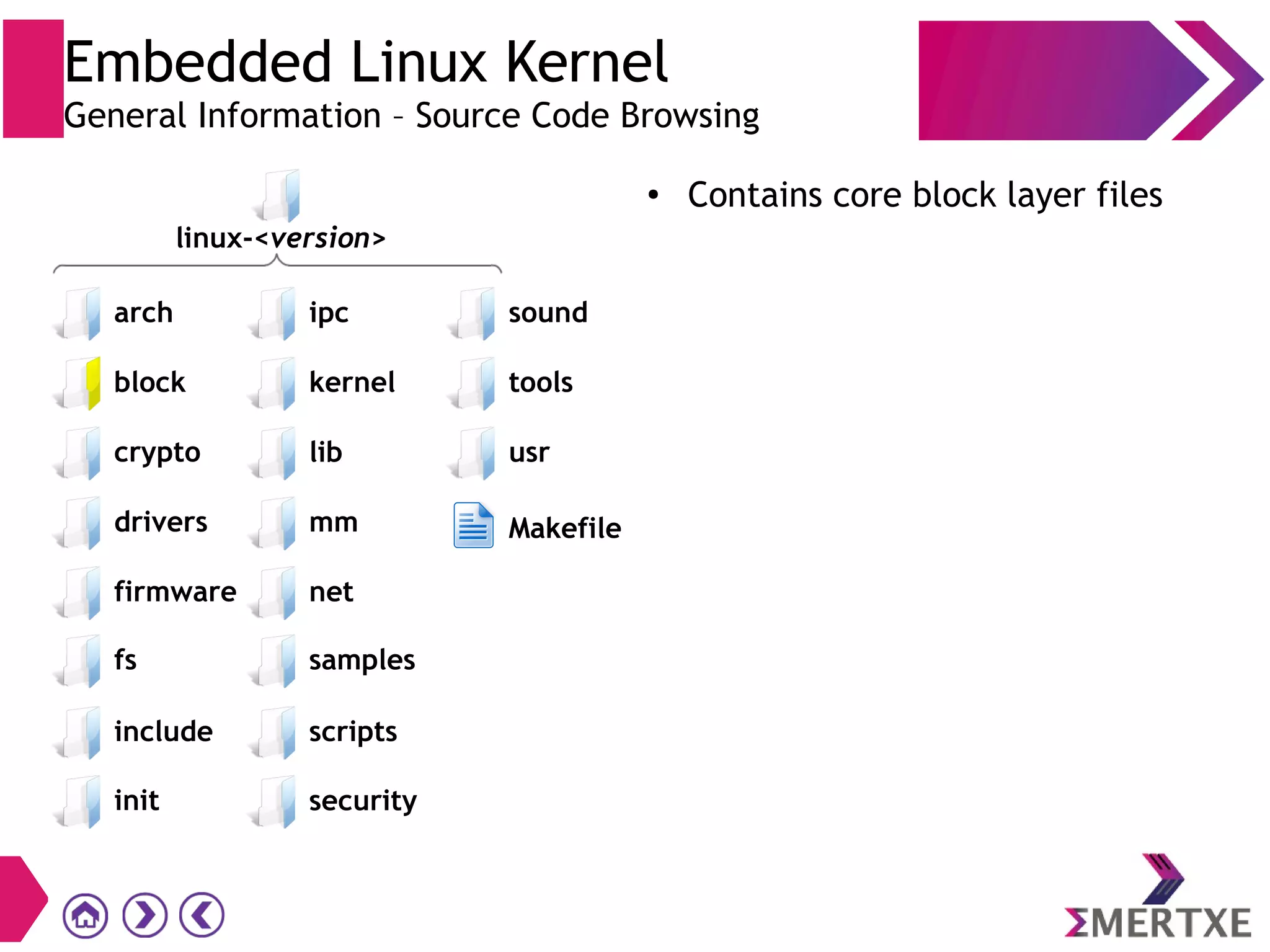
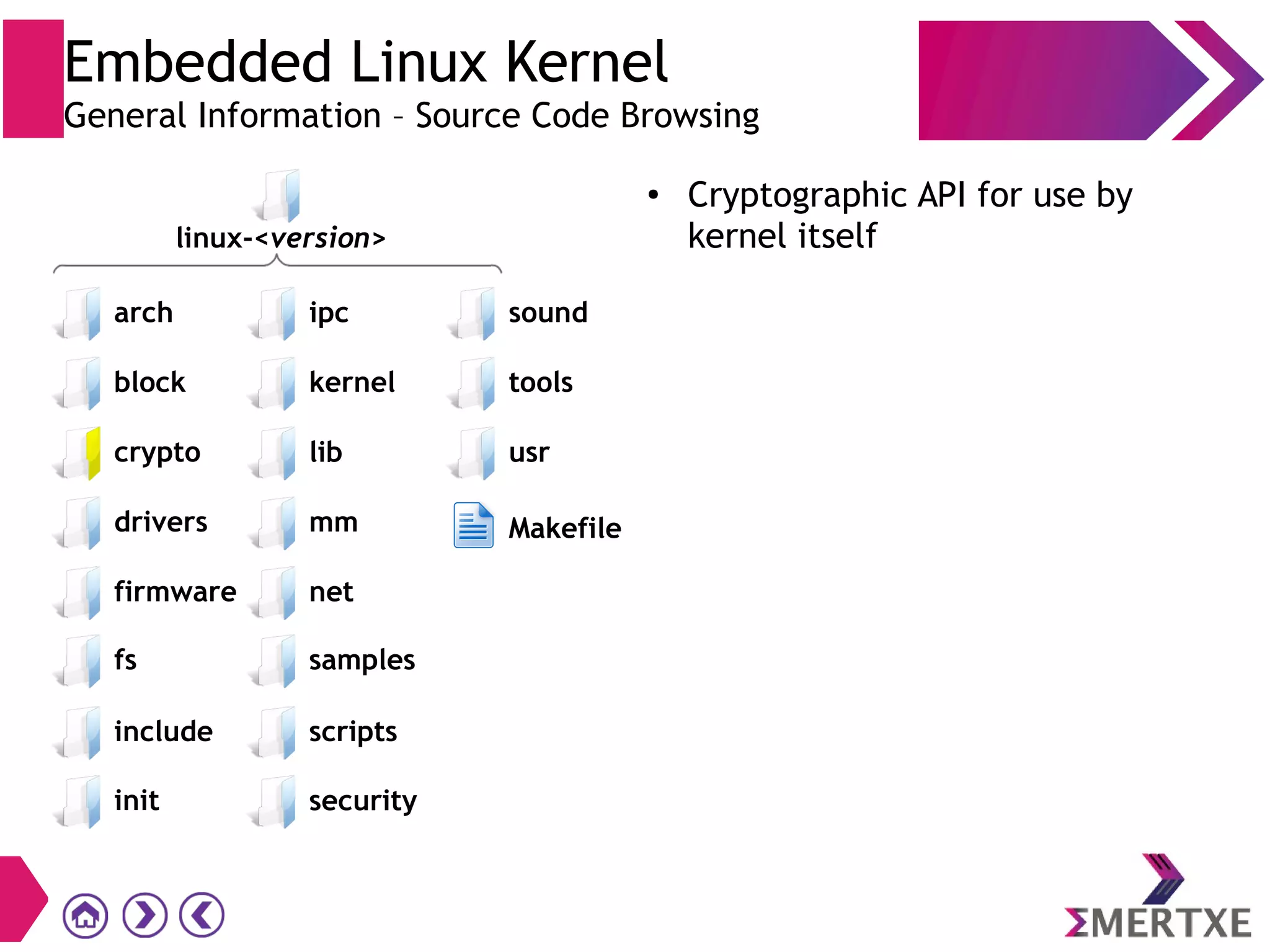
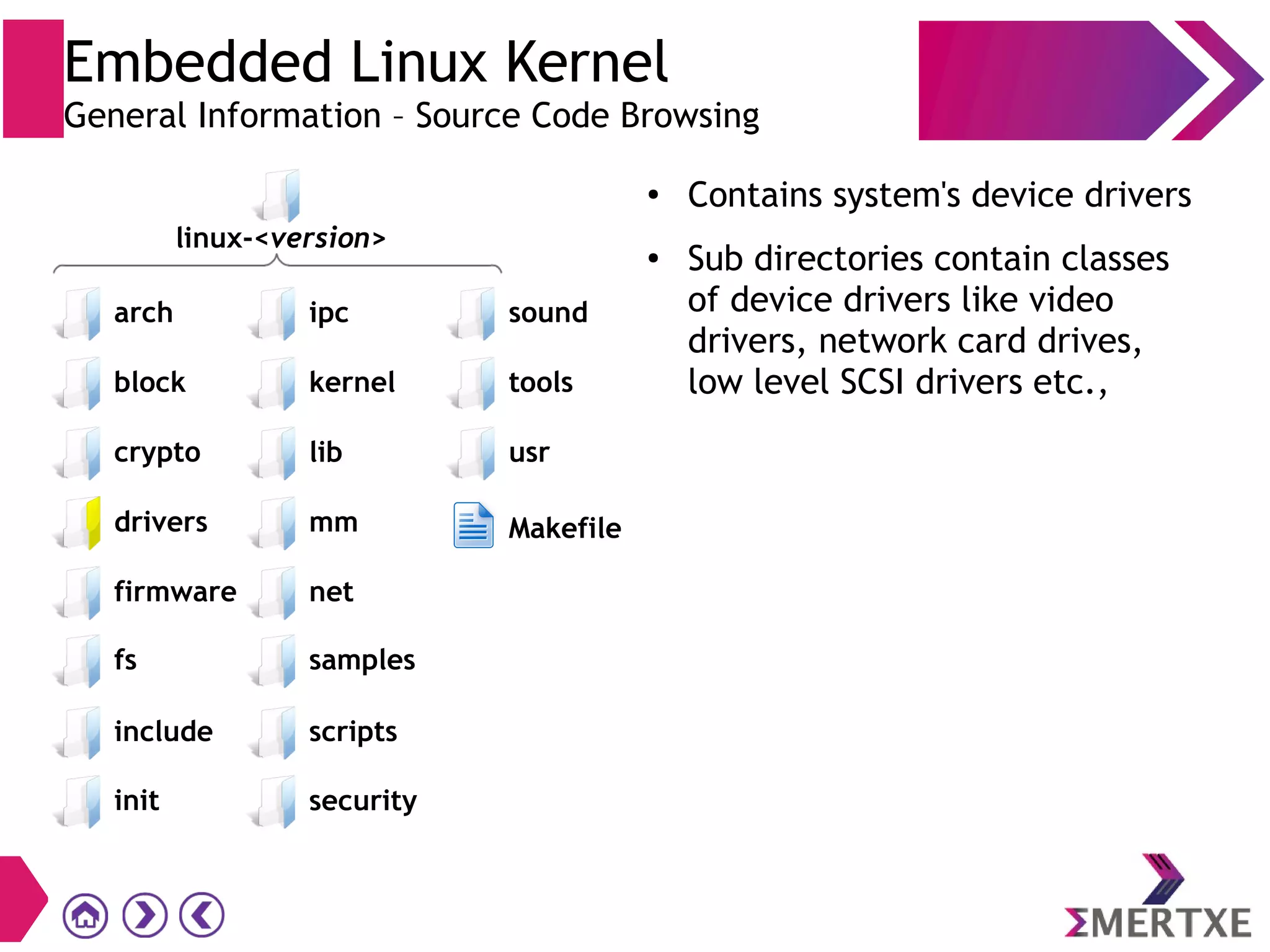
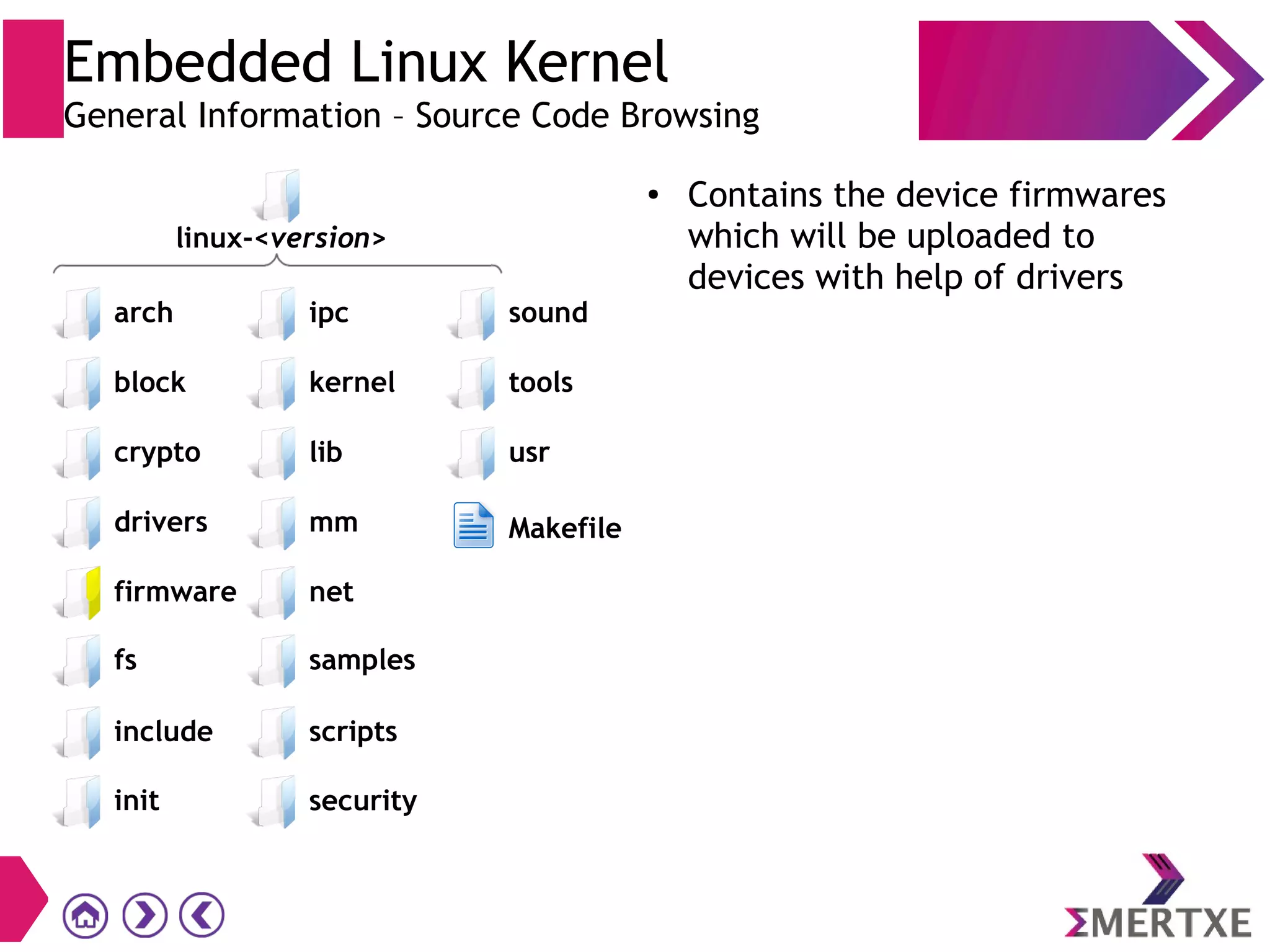
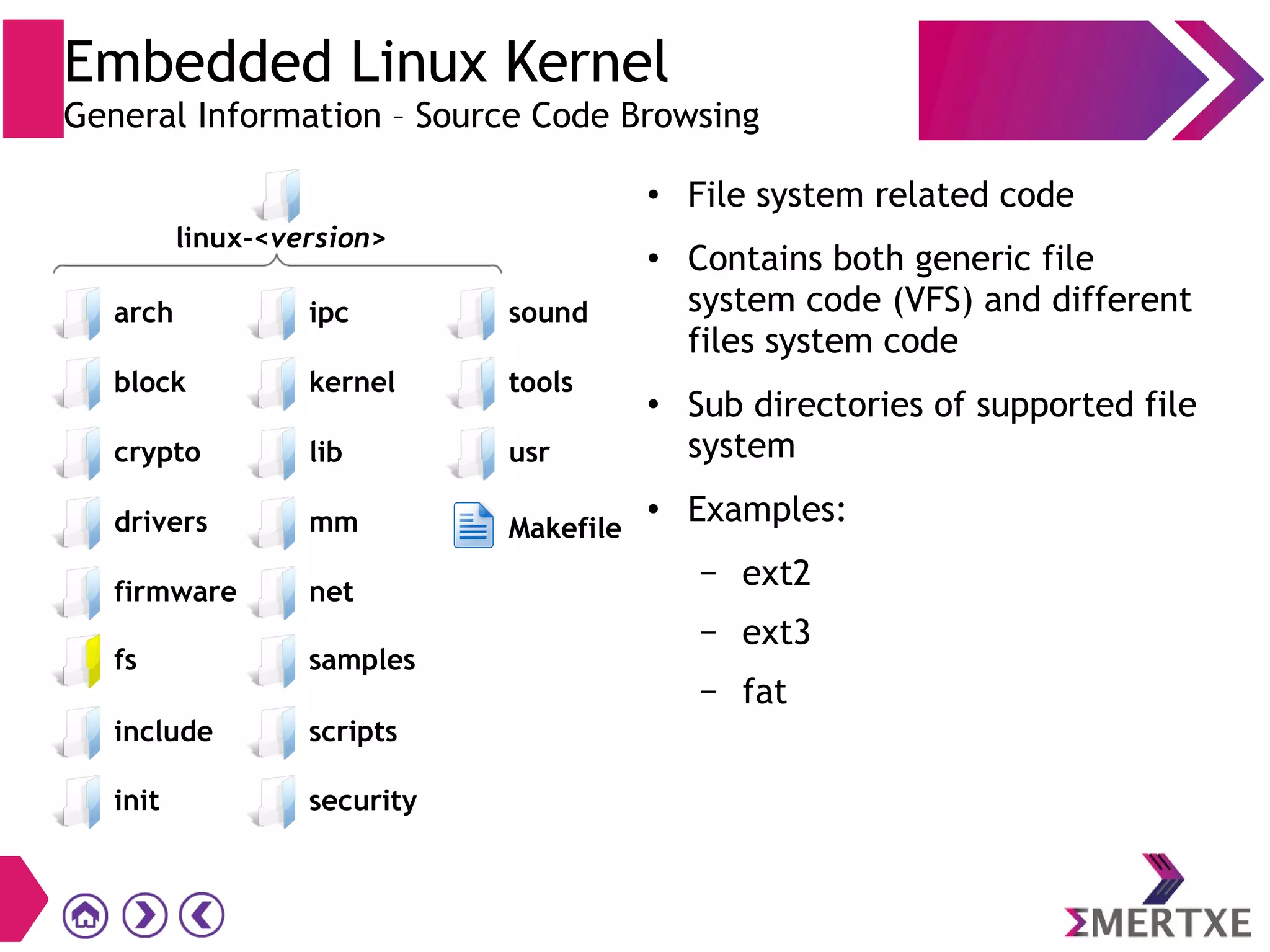
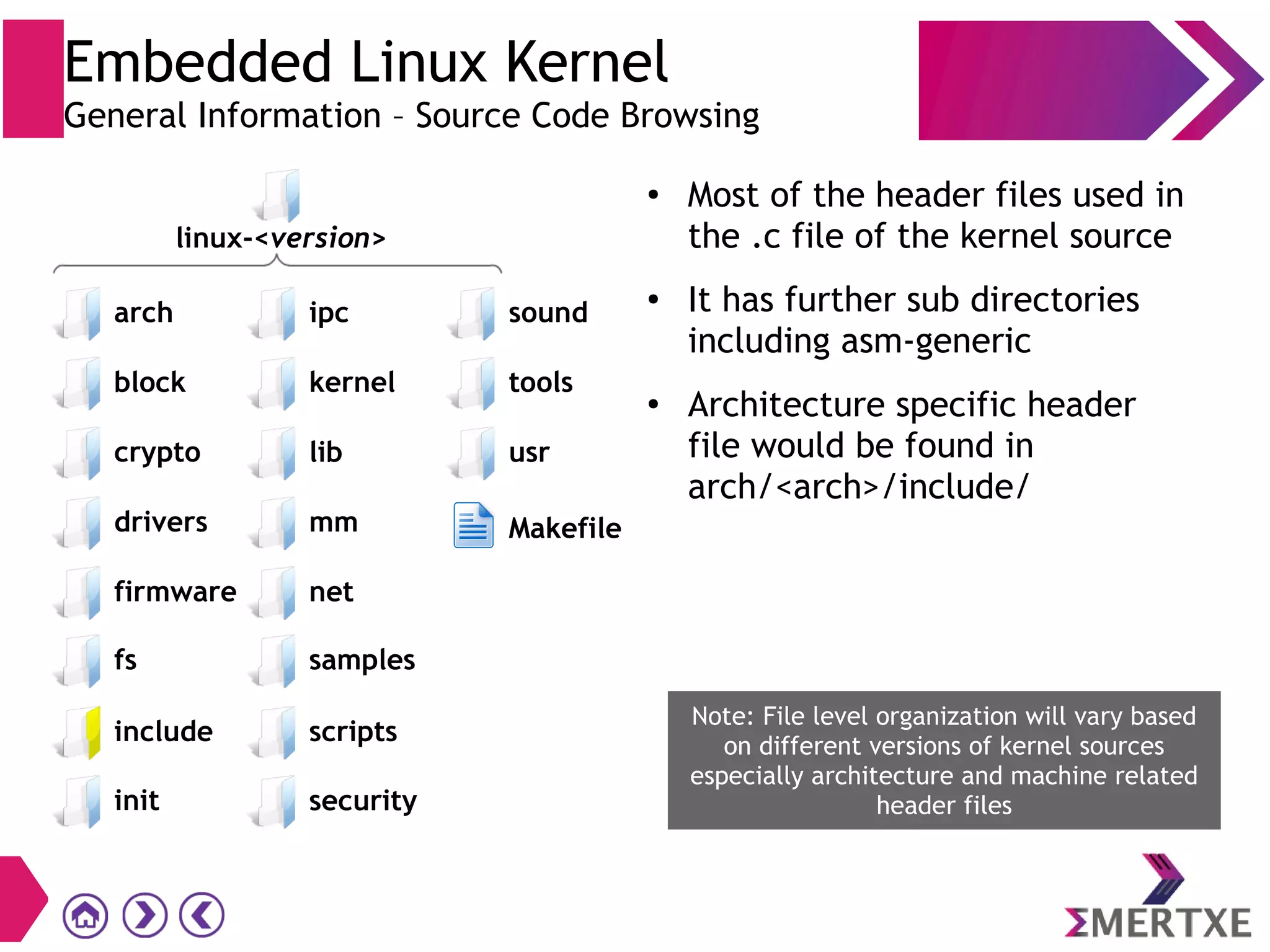
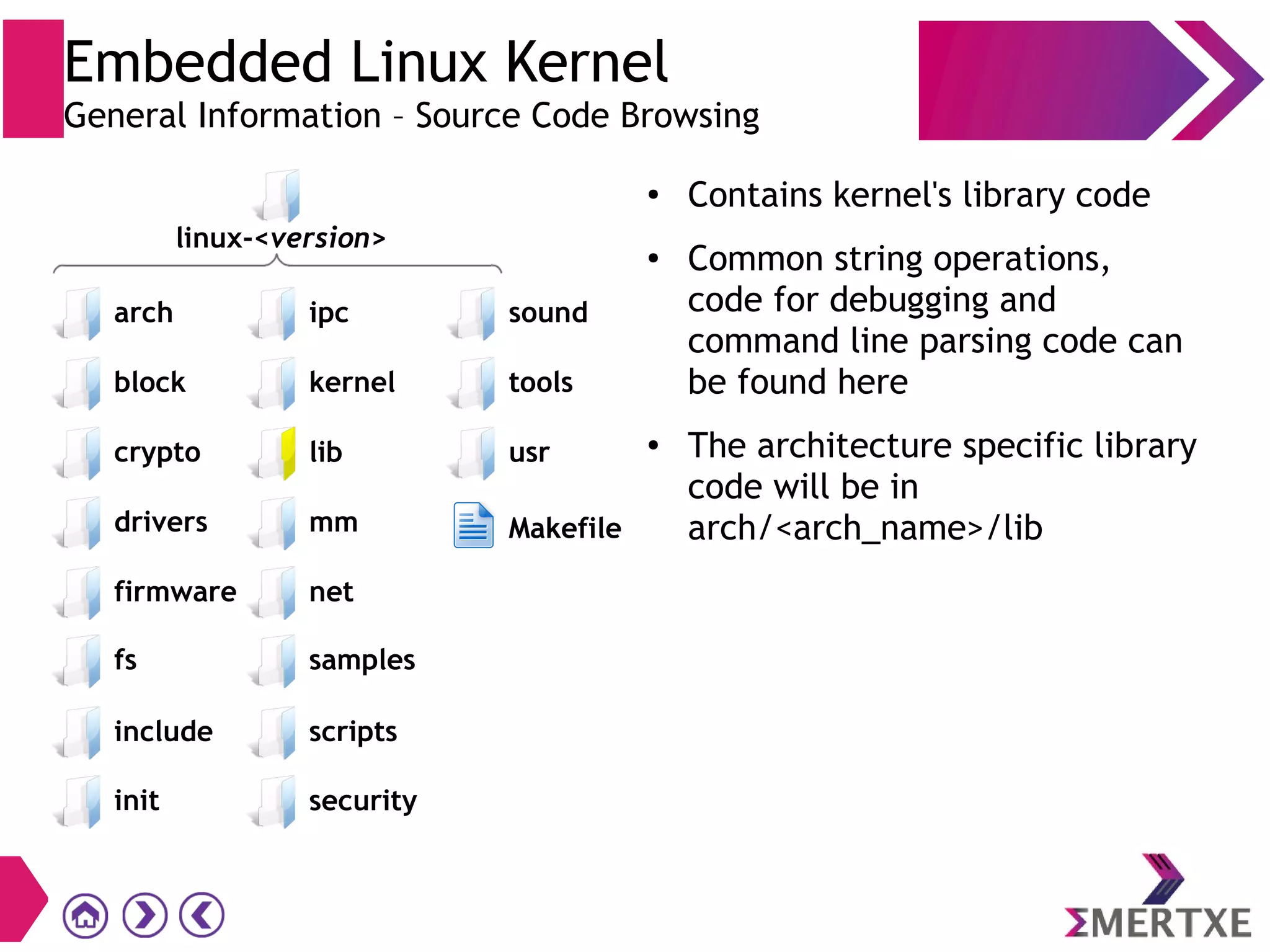
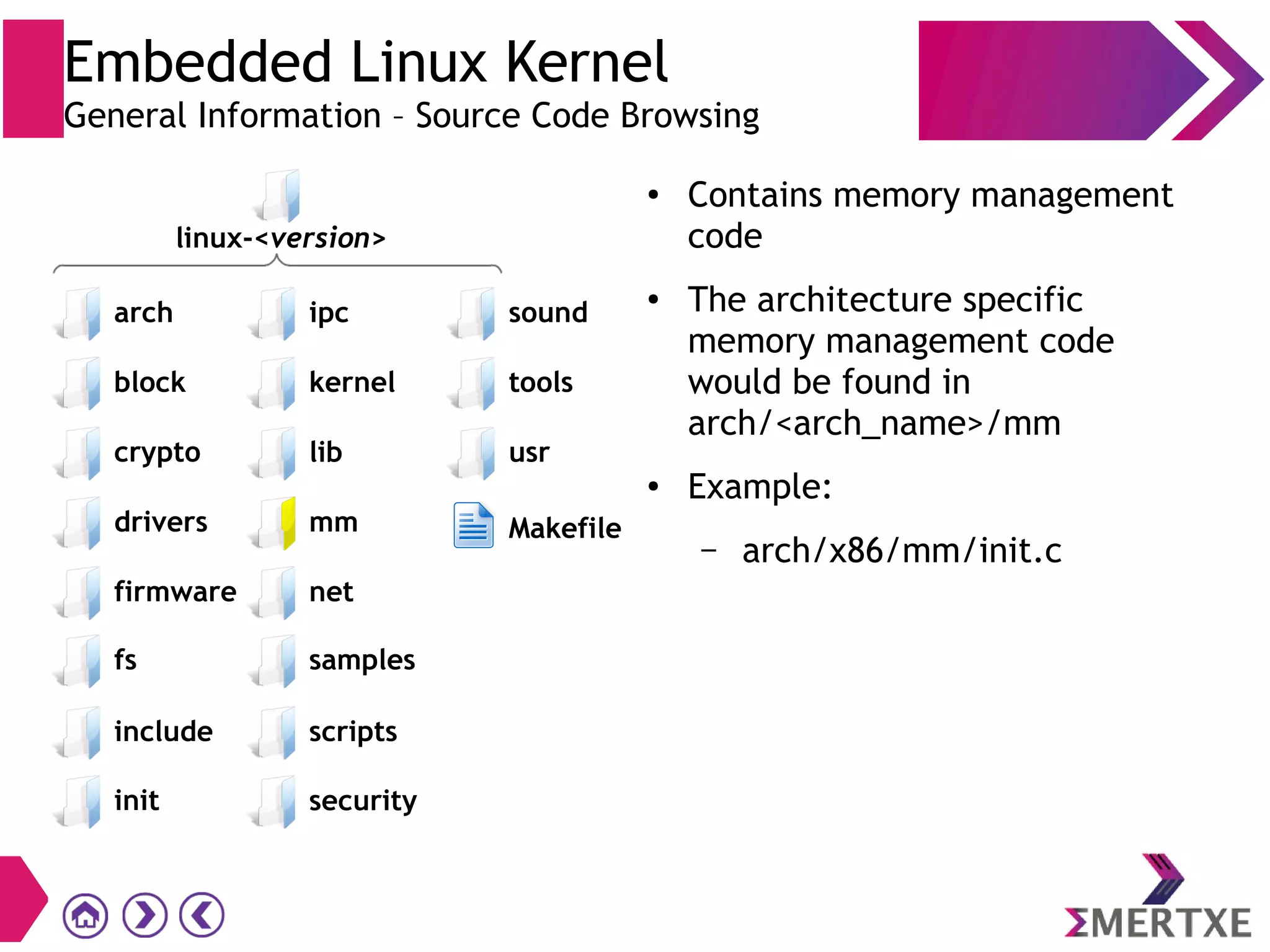
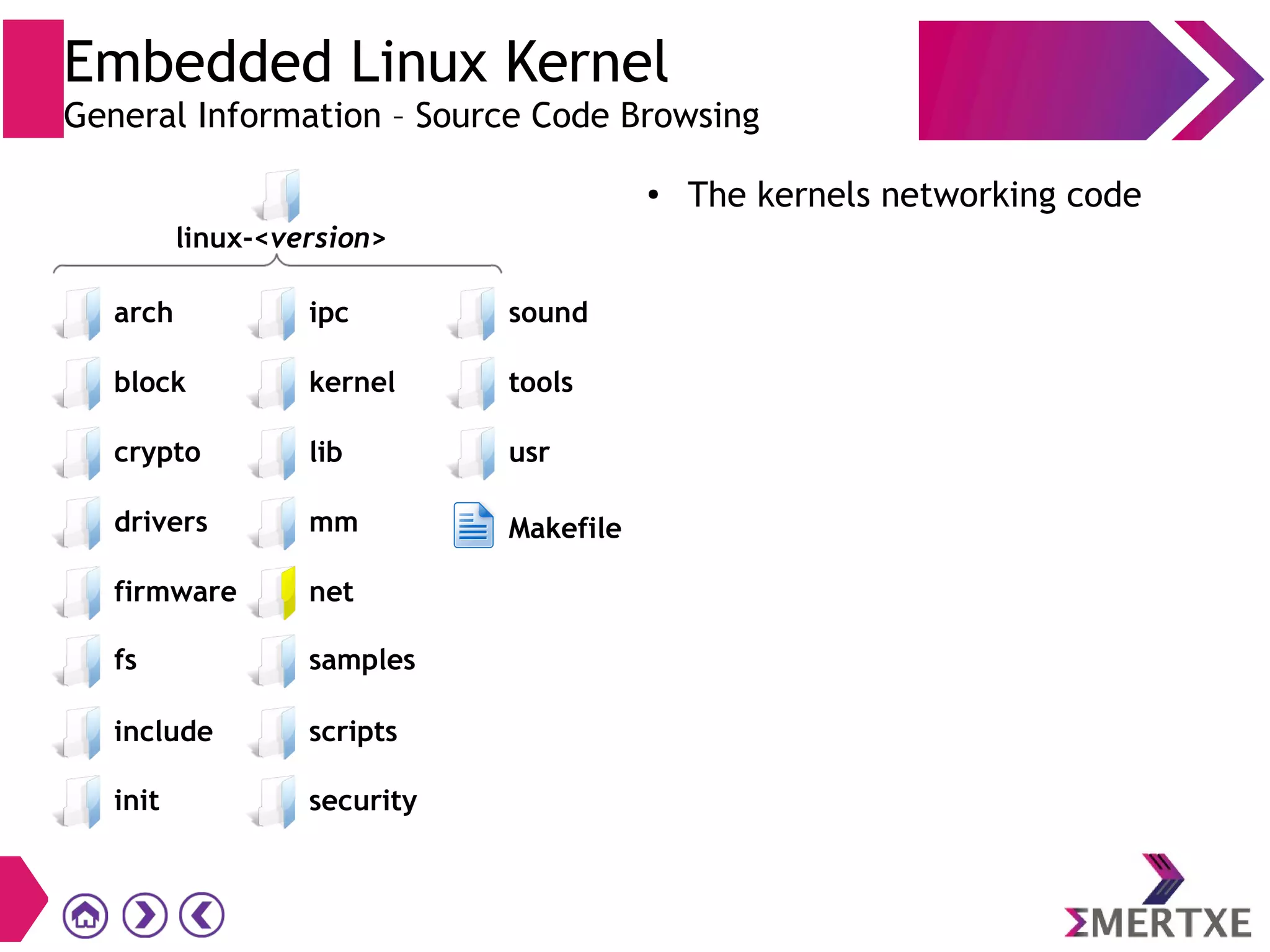
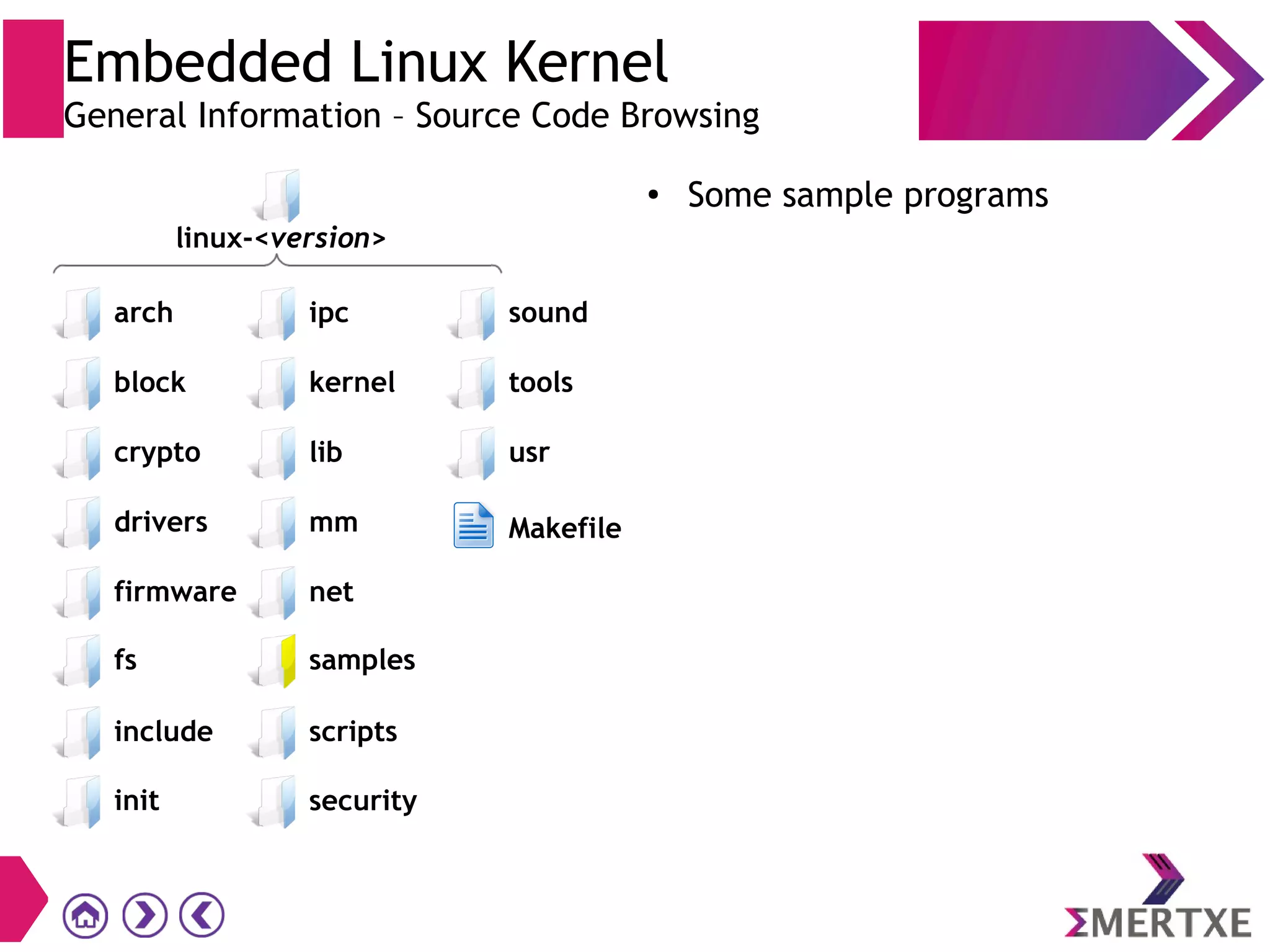
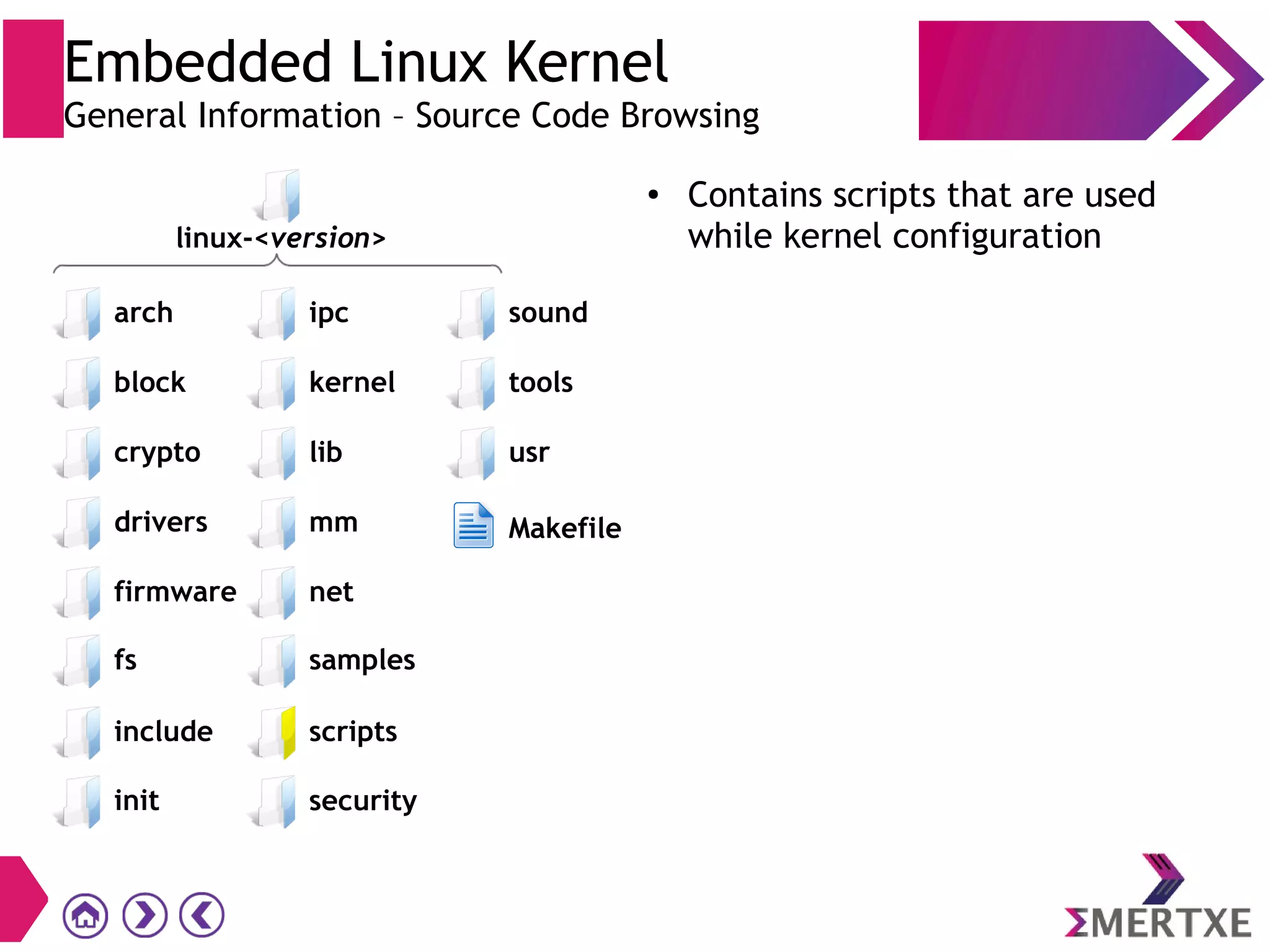
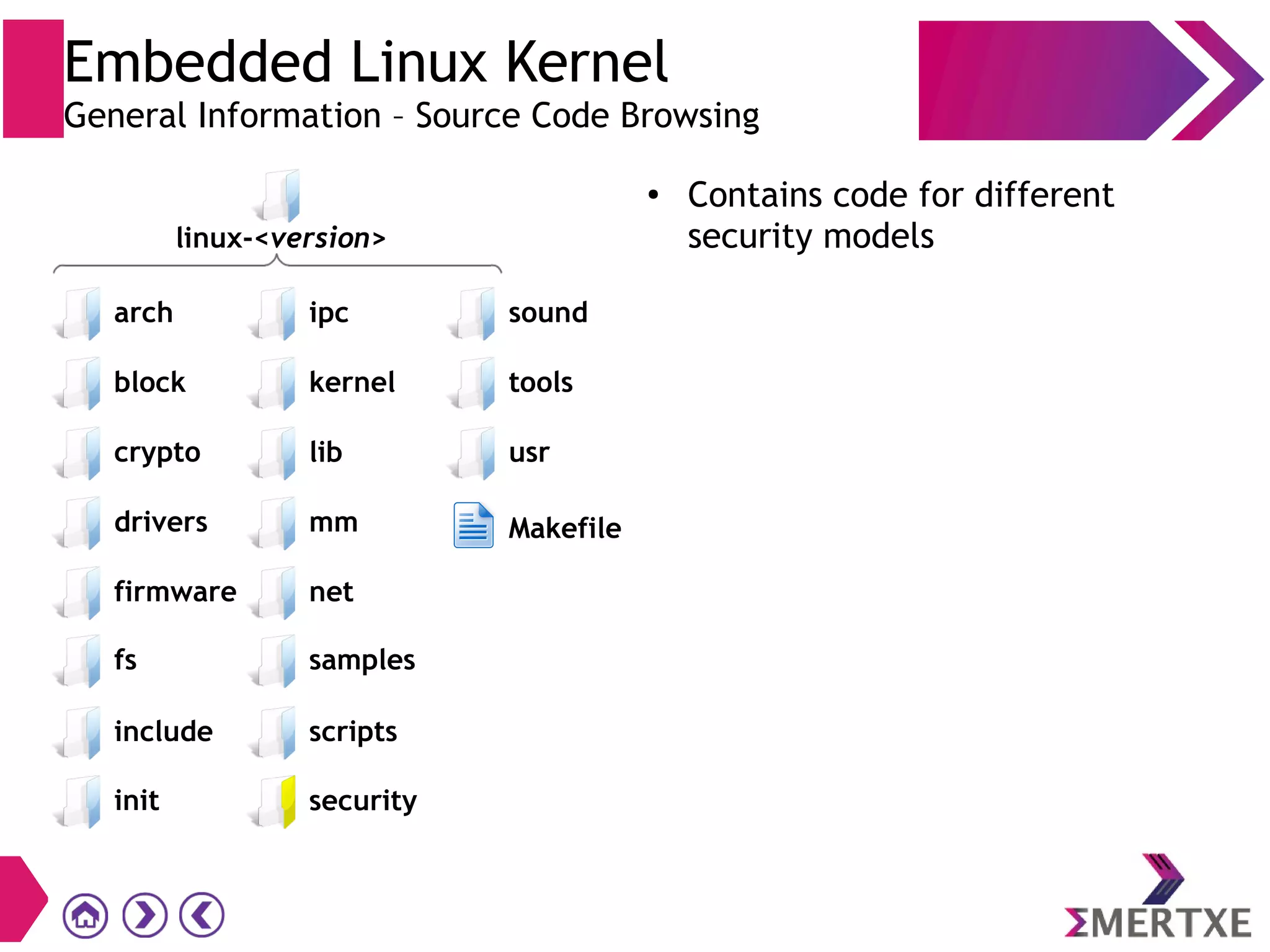
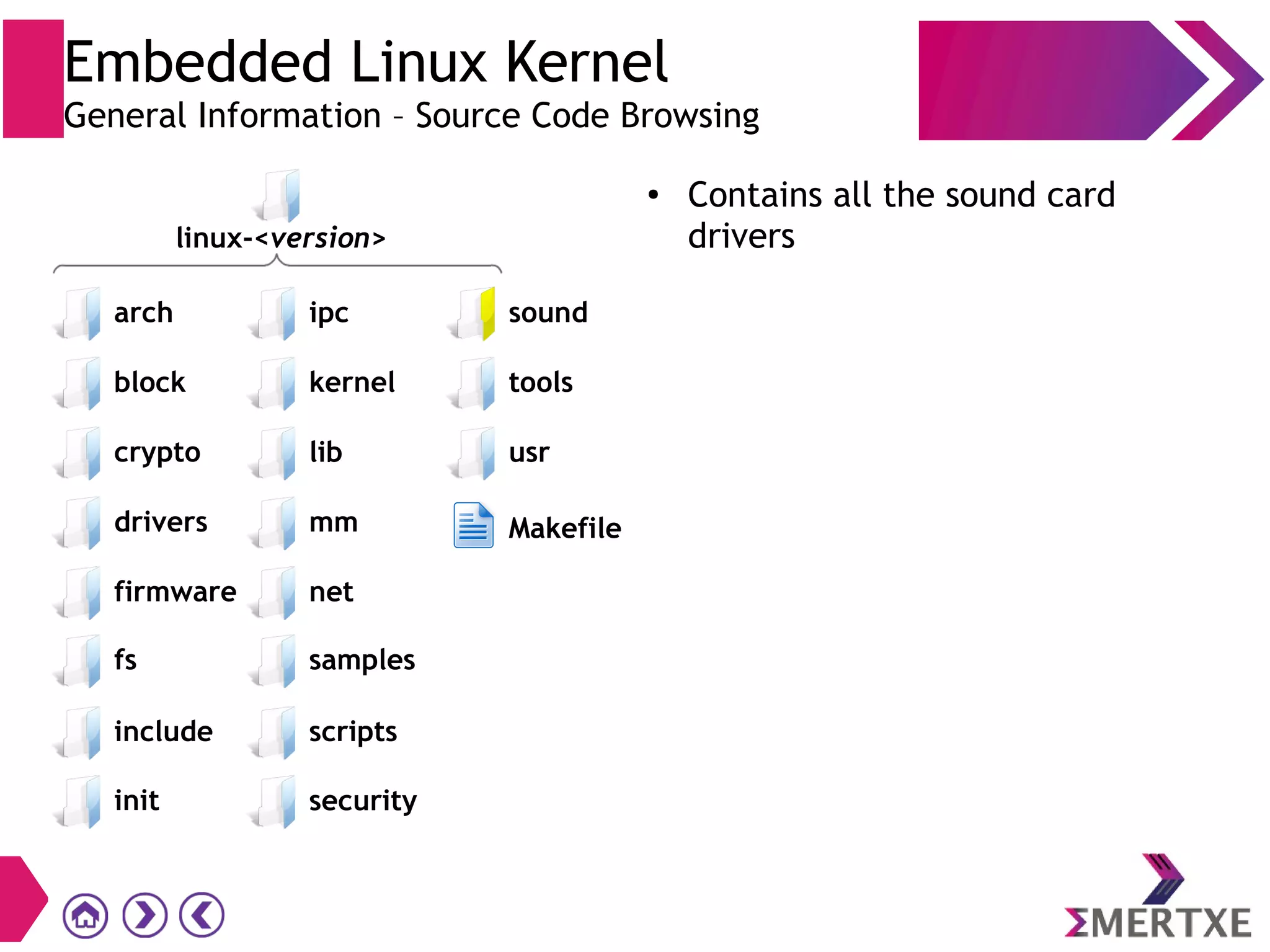
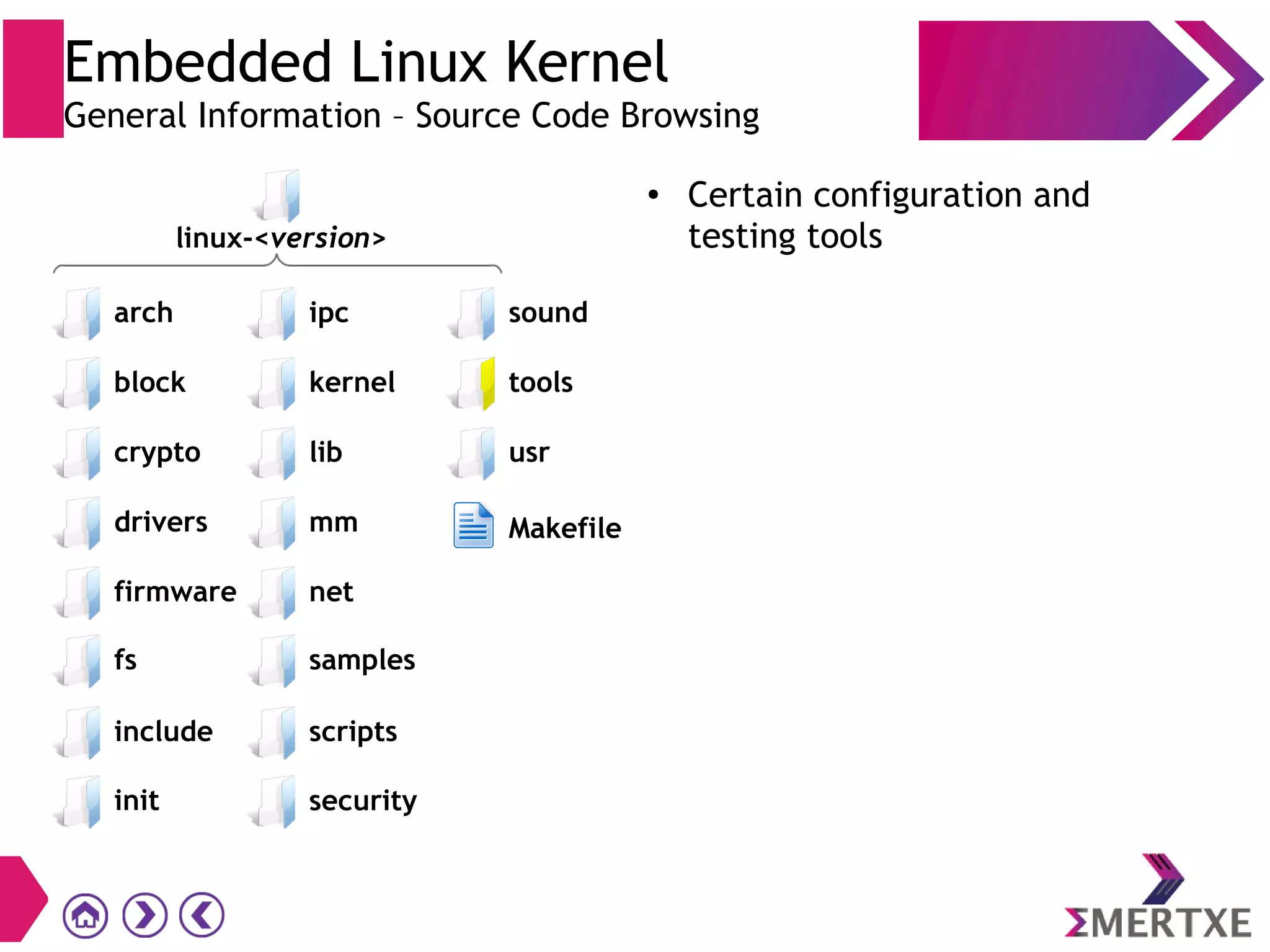
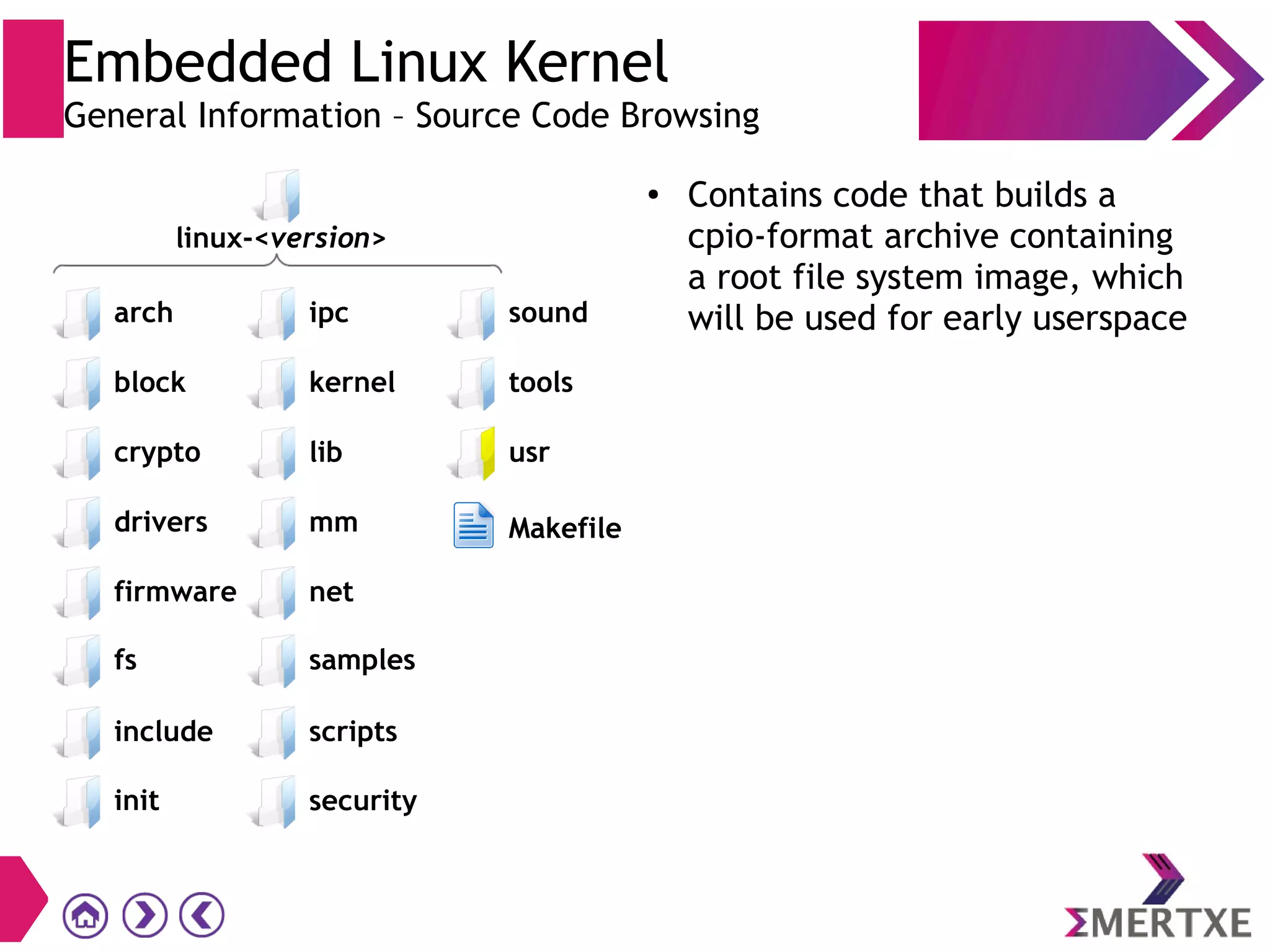
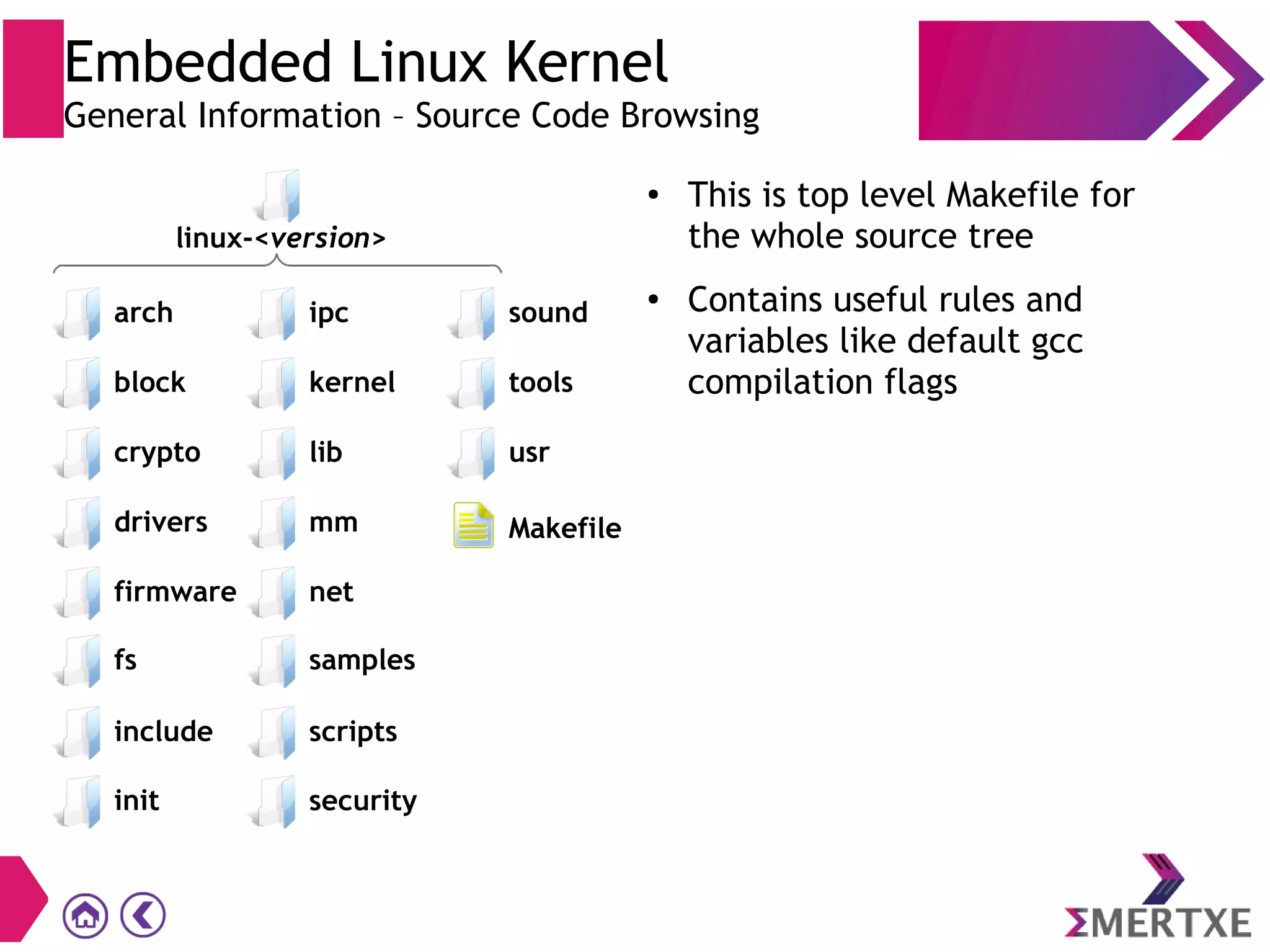
Navigating the directory structure of the Linux kernel source code, detailing important components for kernel operation and configurations.
How to configure the Linux kernel for embedded systems, including methods like make config, make menuconfig, and handling configuration files.
Instructions on compiling the kernel from source, generating kernel images suitable for deployment on embedded systems.
Steps for deploying the compiled kernel onto target systems using a TFTP server and U-Boot commands for execution.
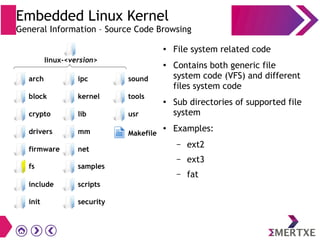
Introduction to file systems as methods for organizing data in embedded Linux systems, including discussions on types, structures, and storage media.
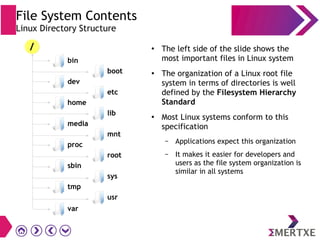
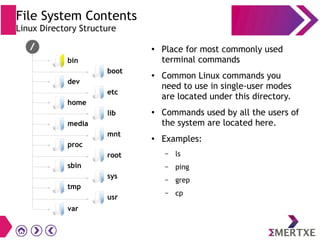
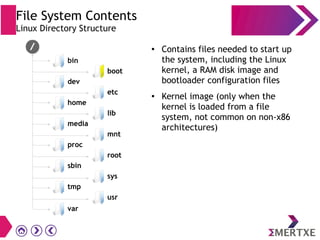
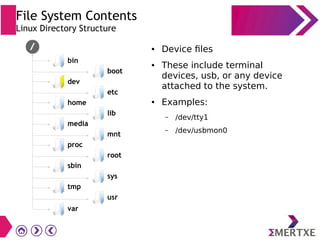
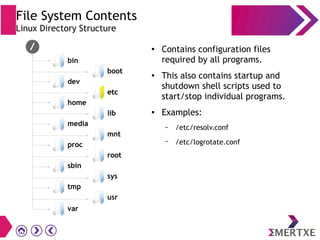
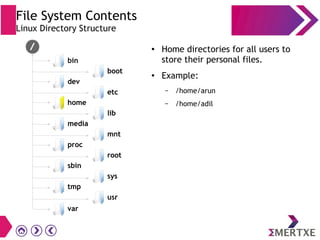
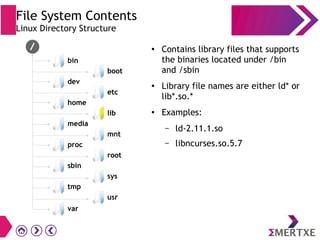
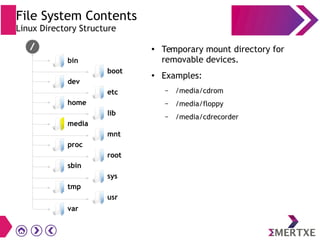
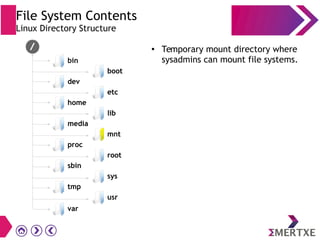
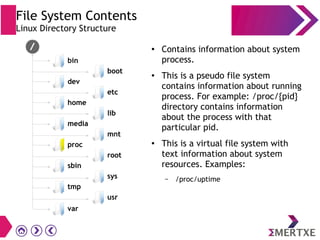
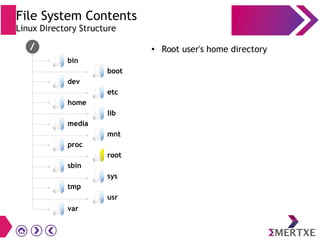
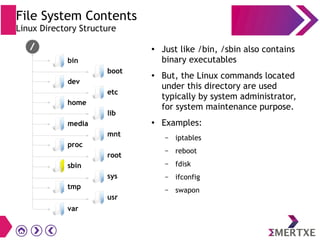
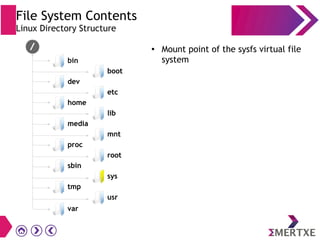
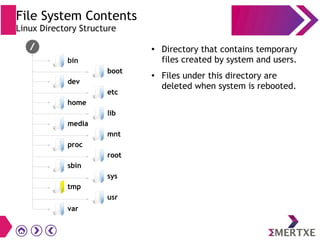
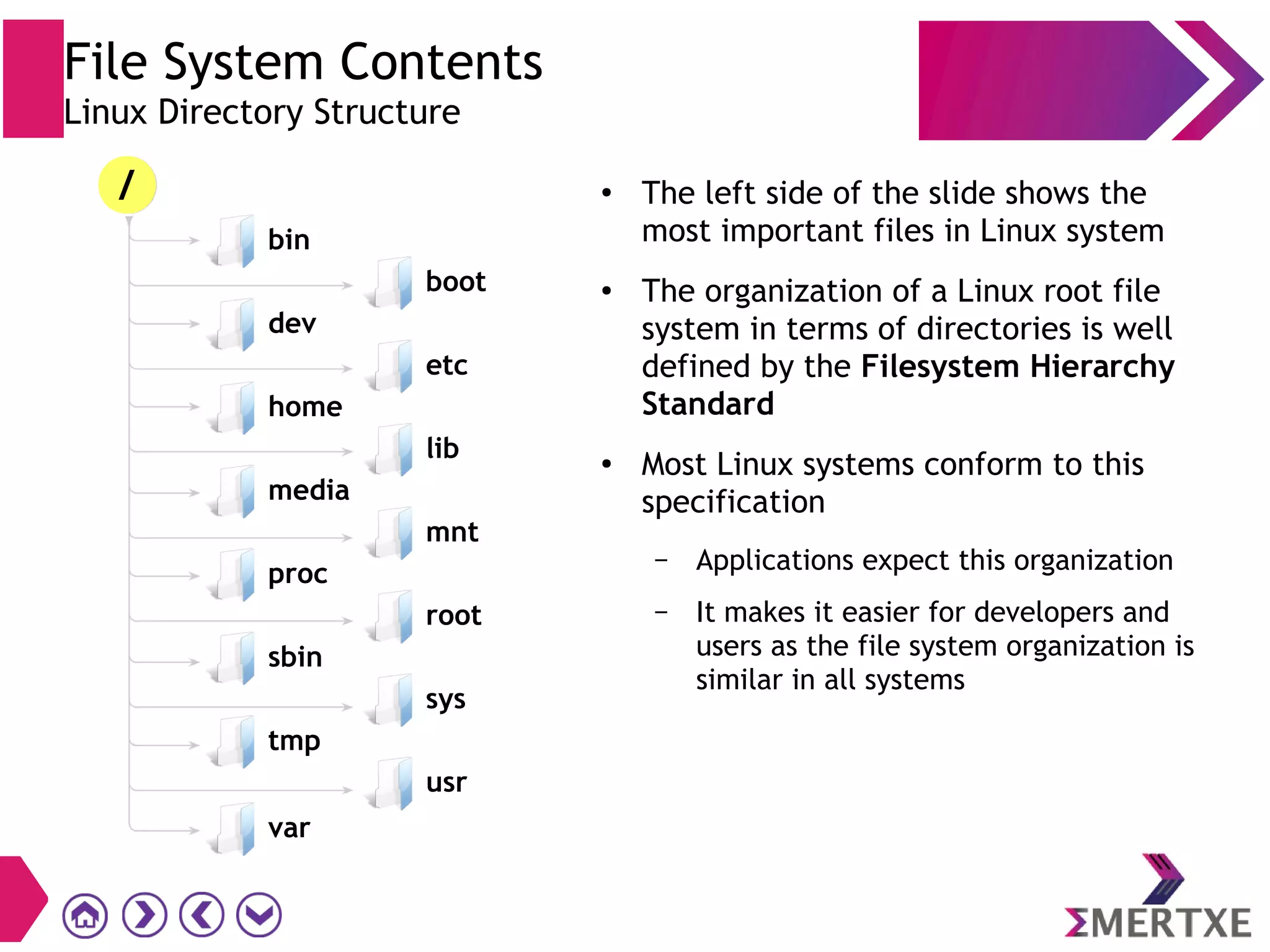
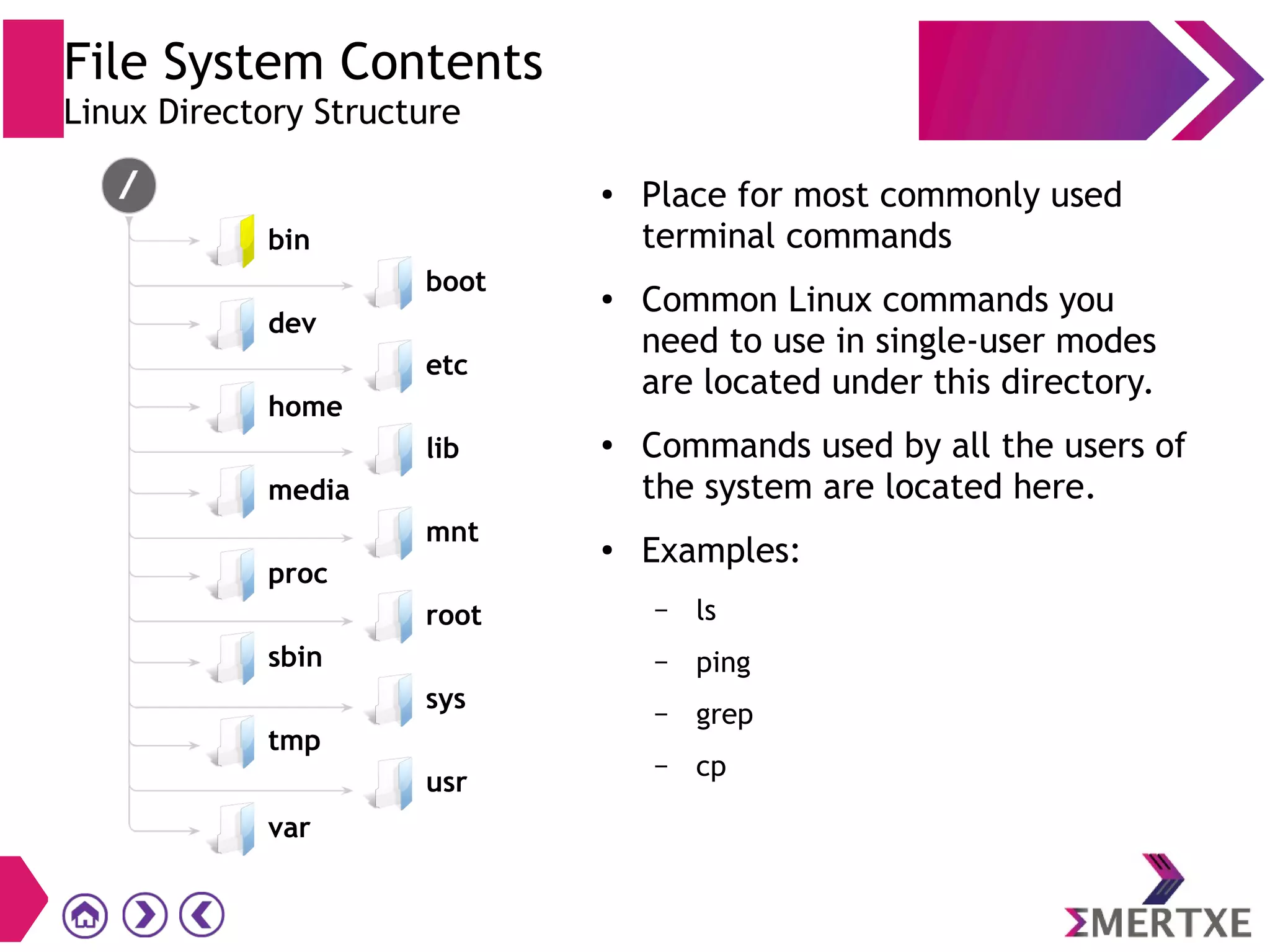
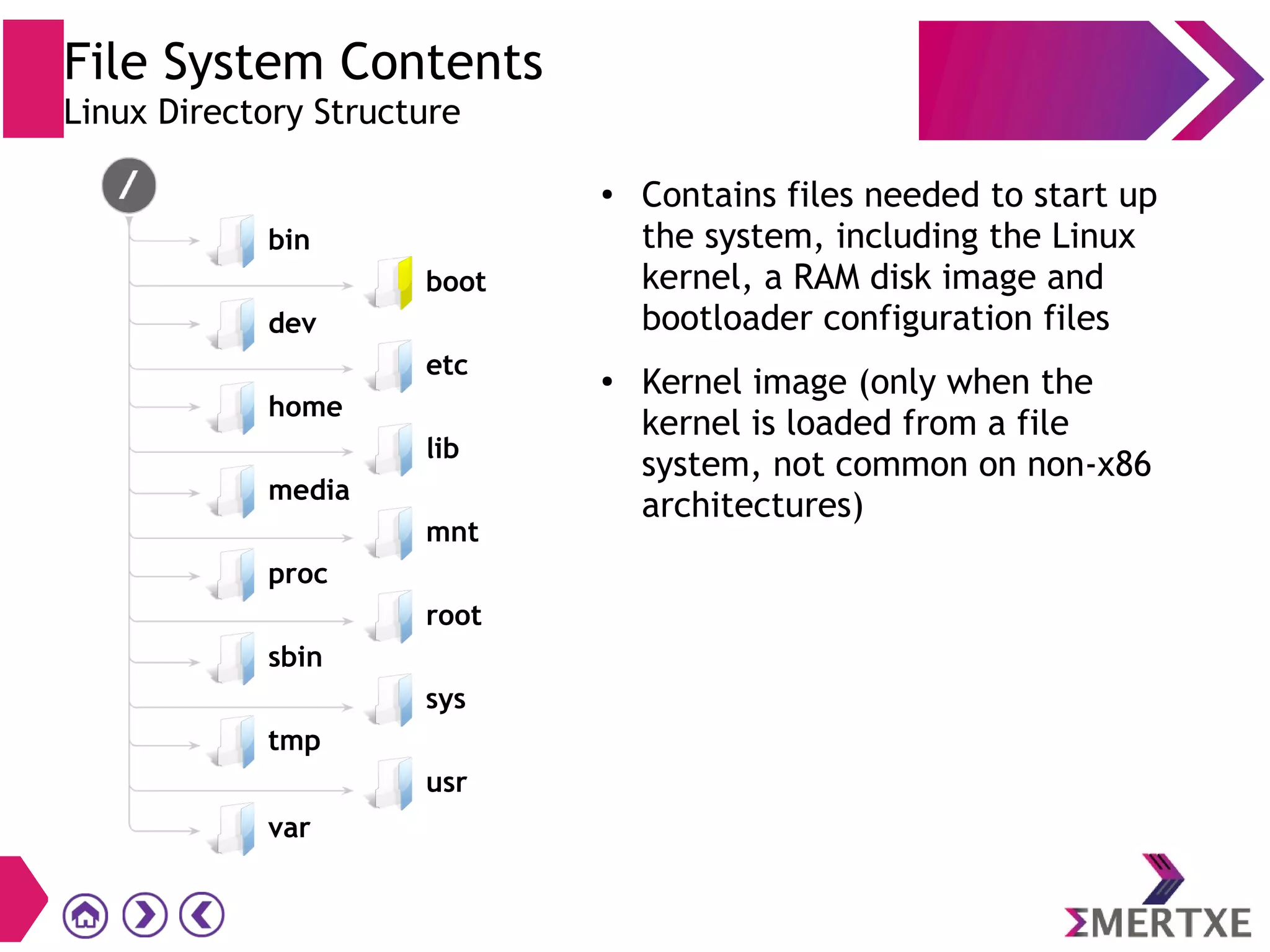
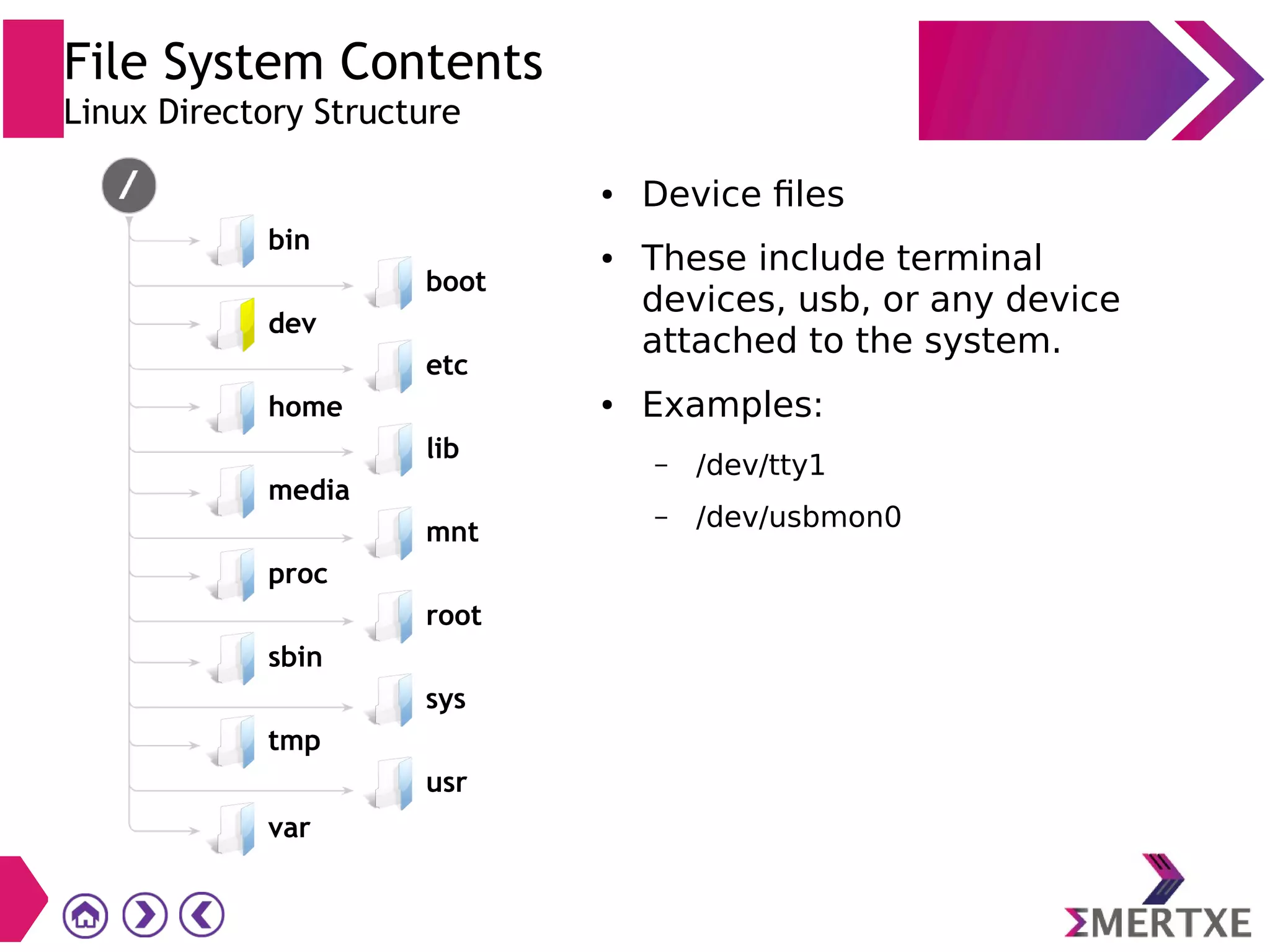
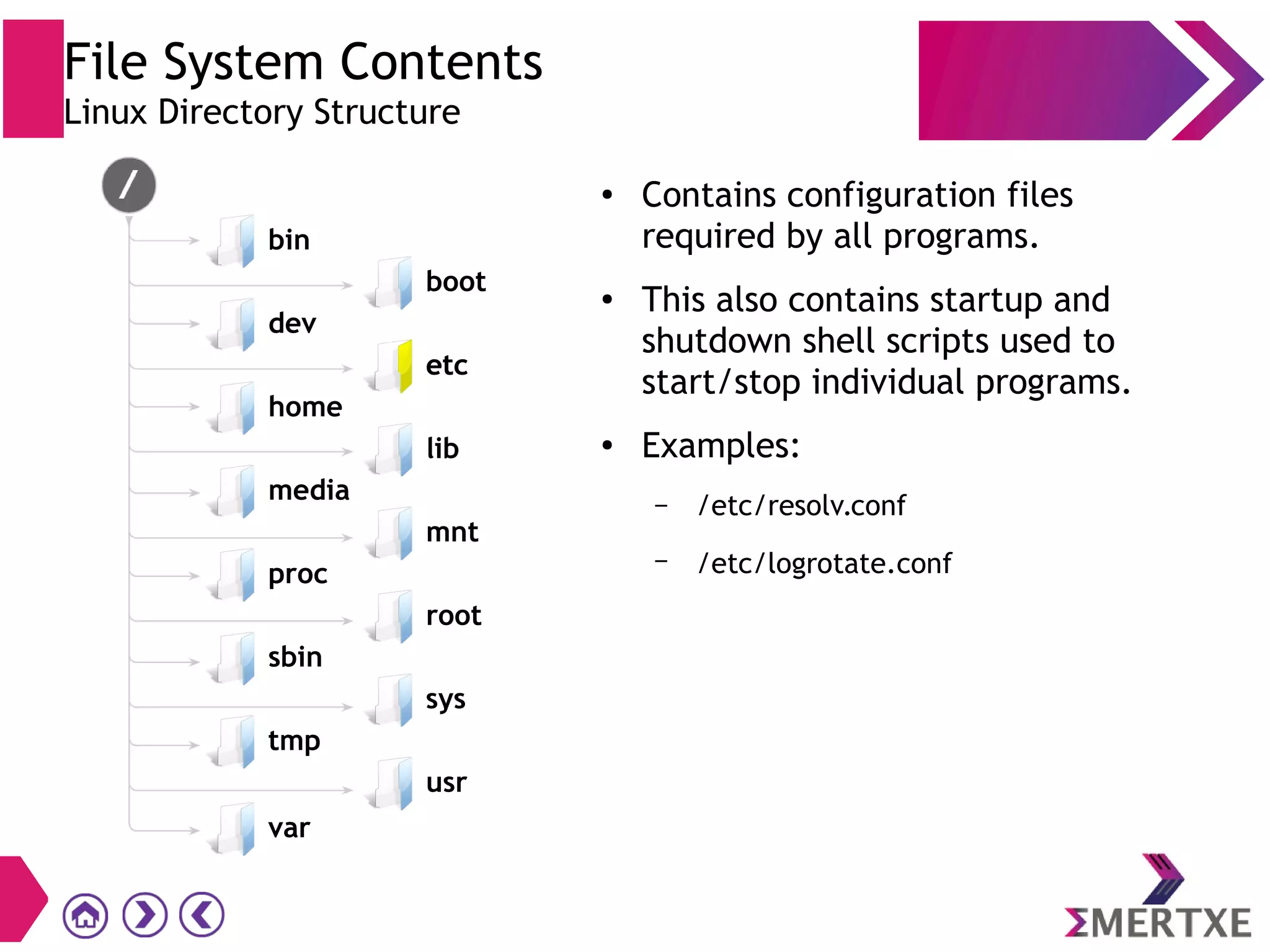
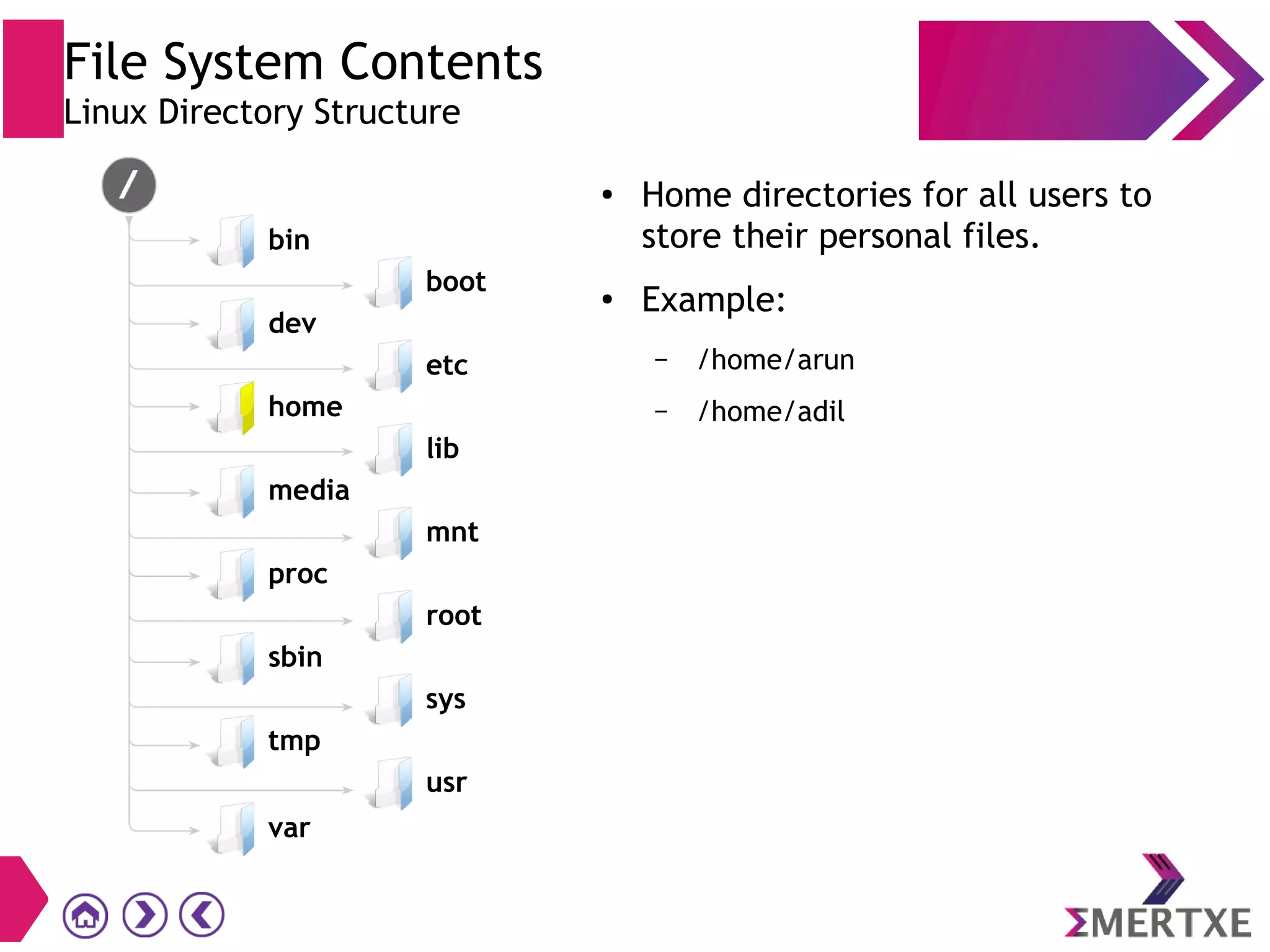
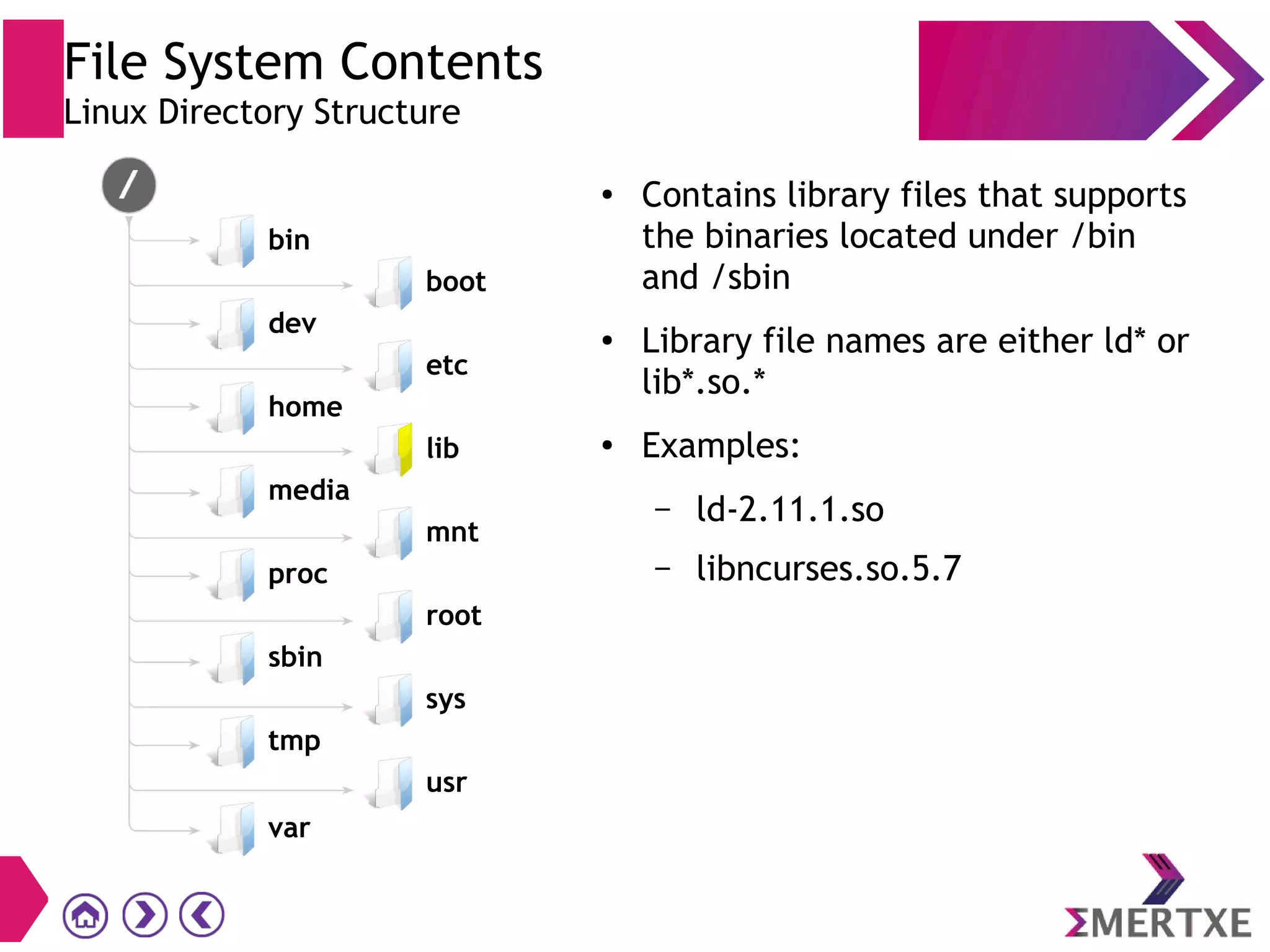
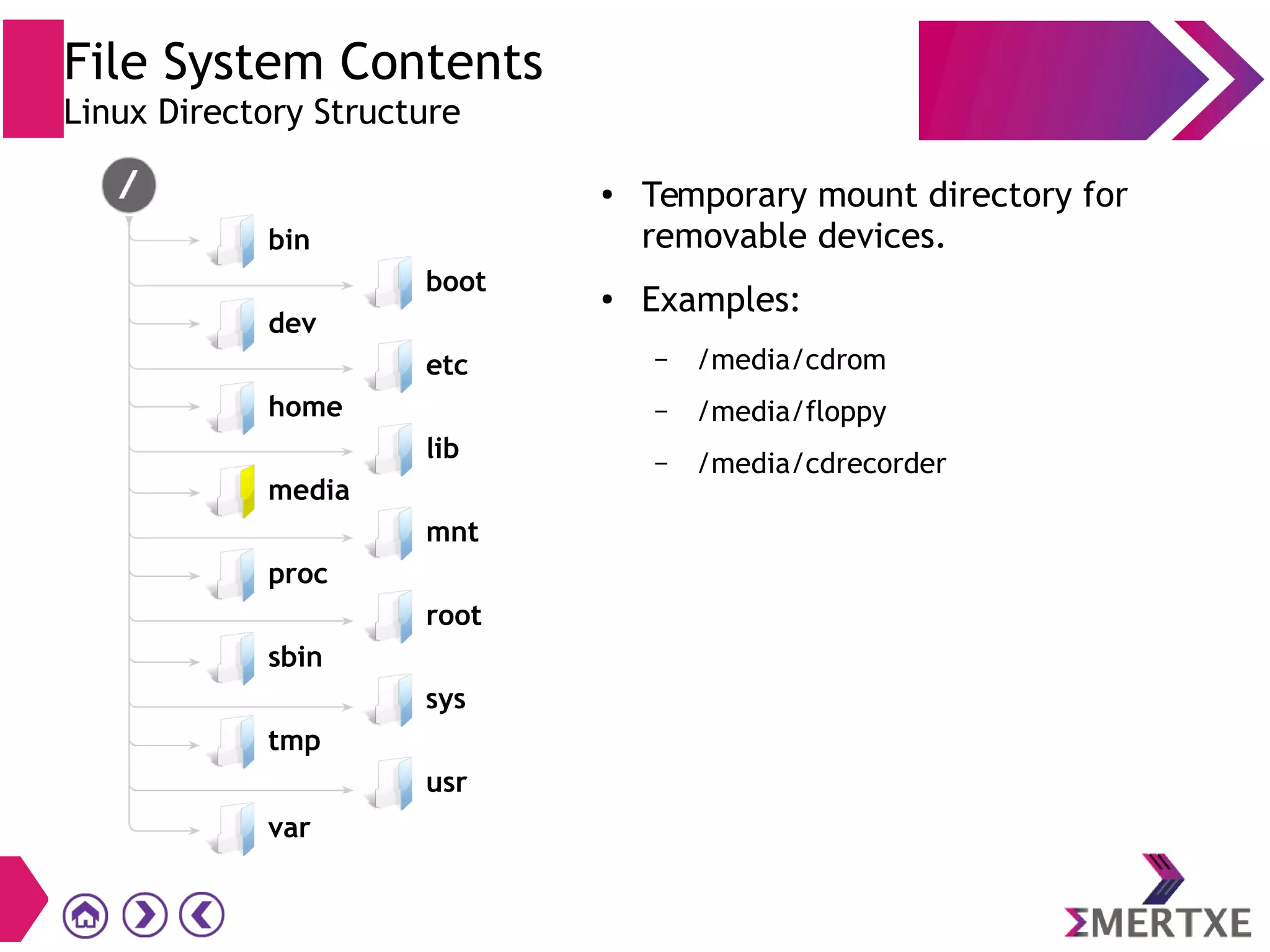
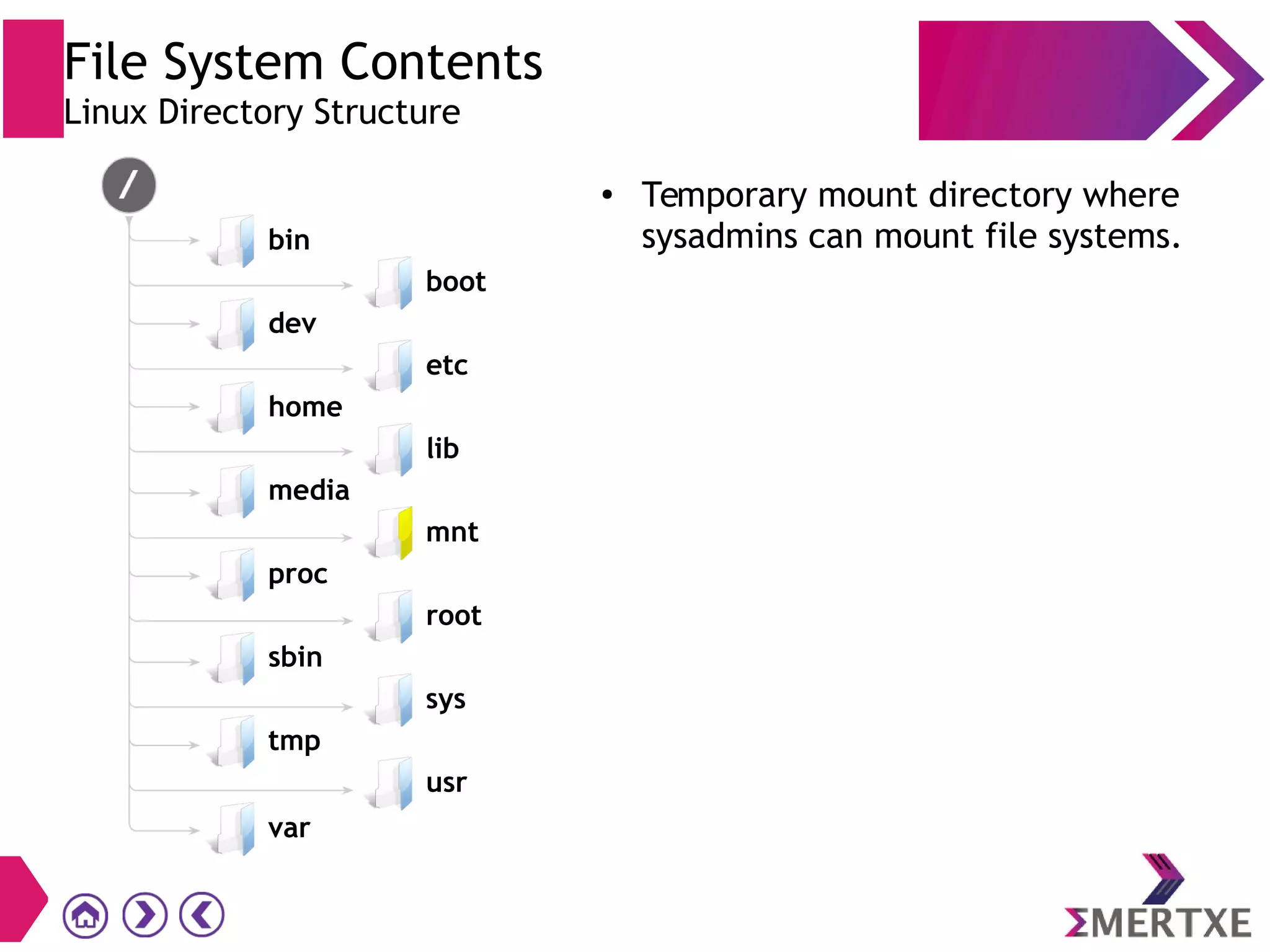
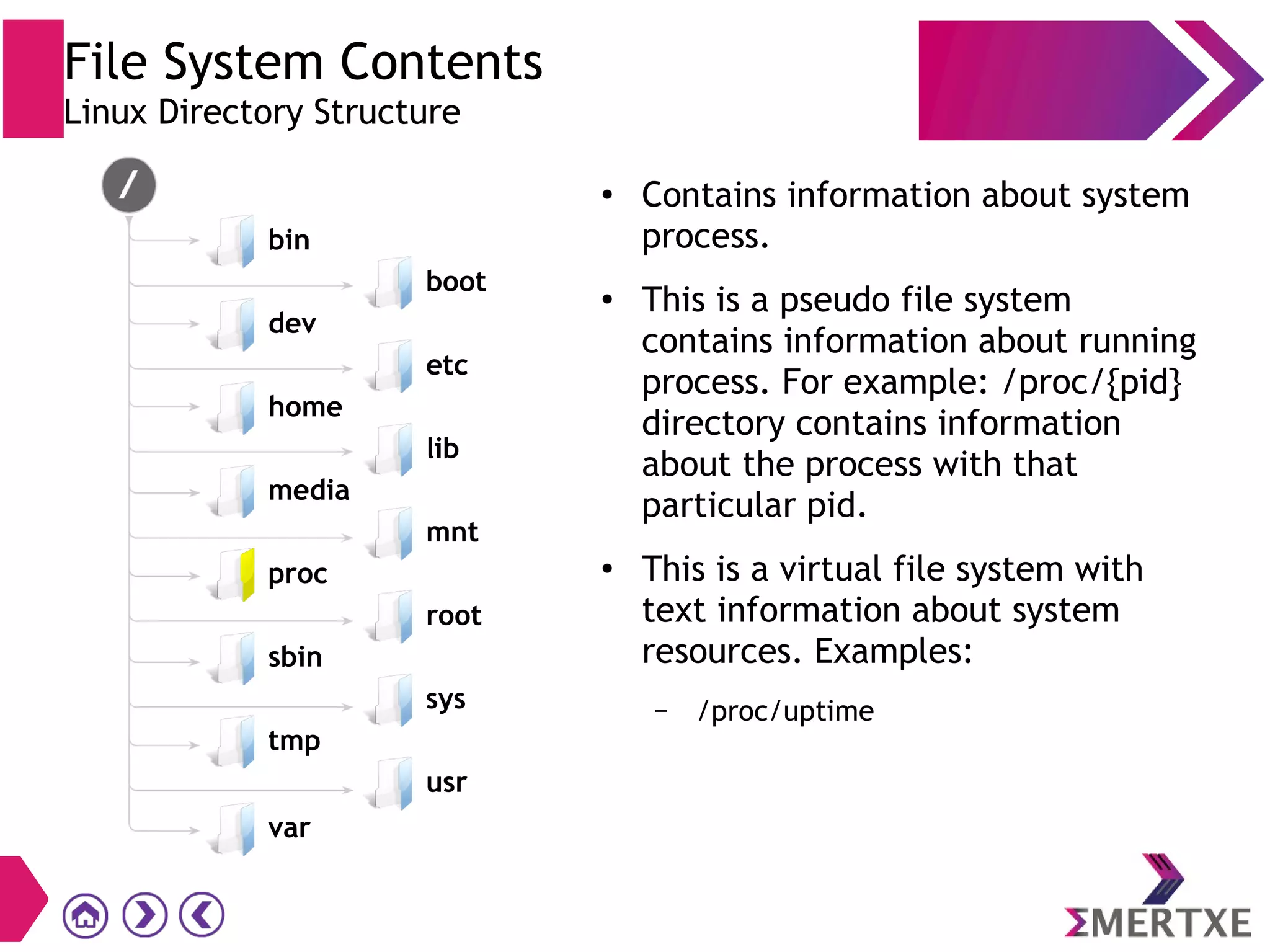
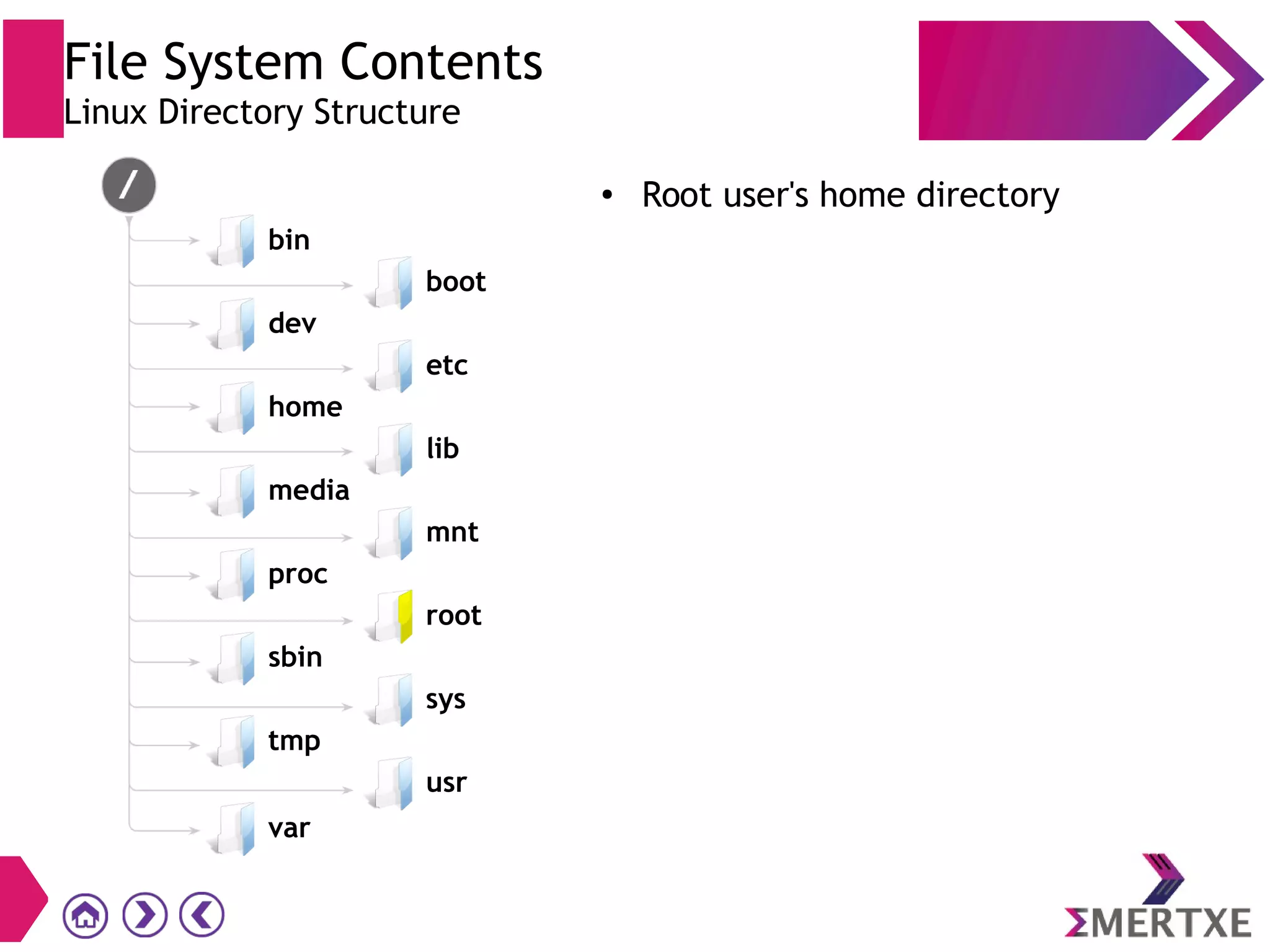
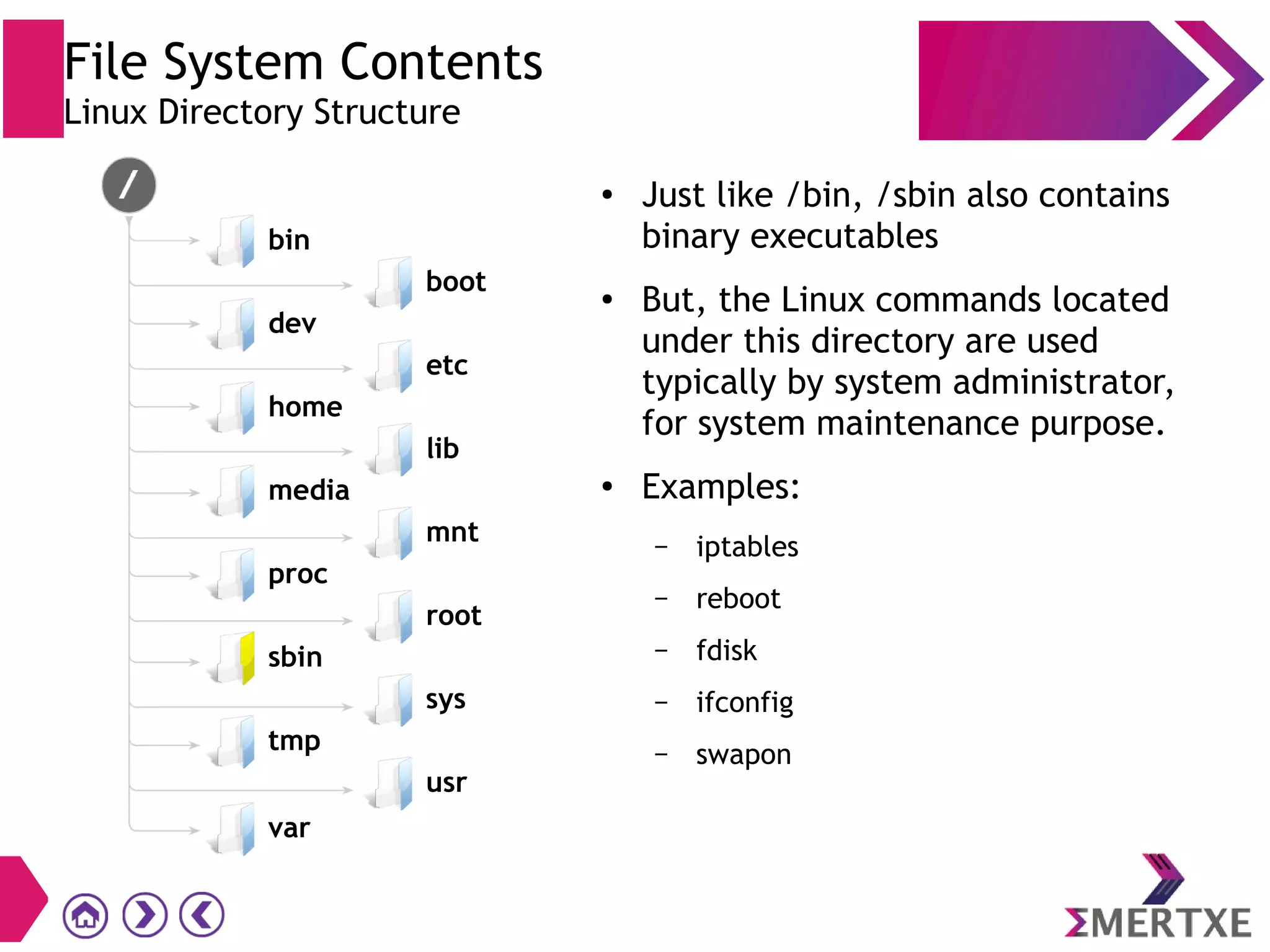
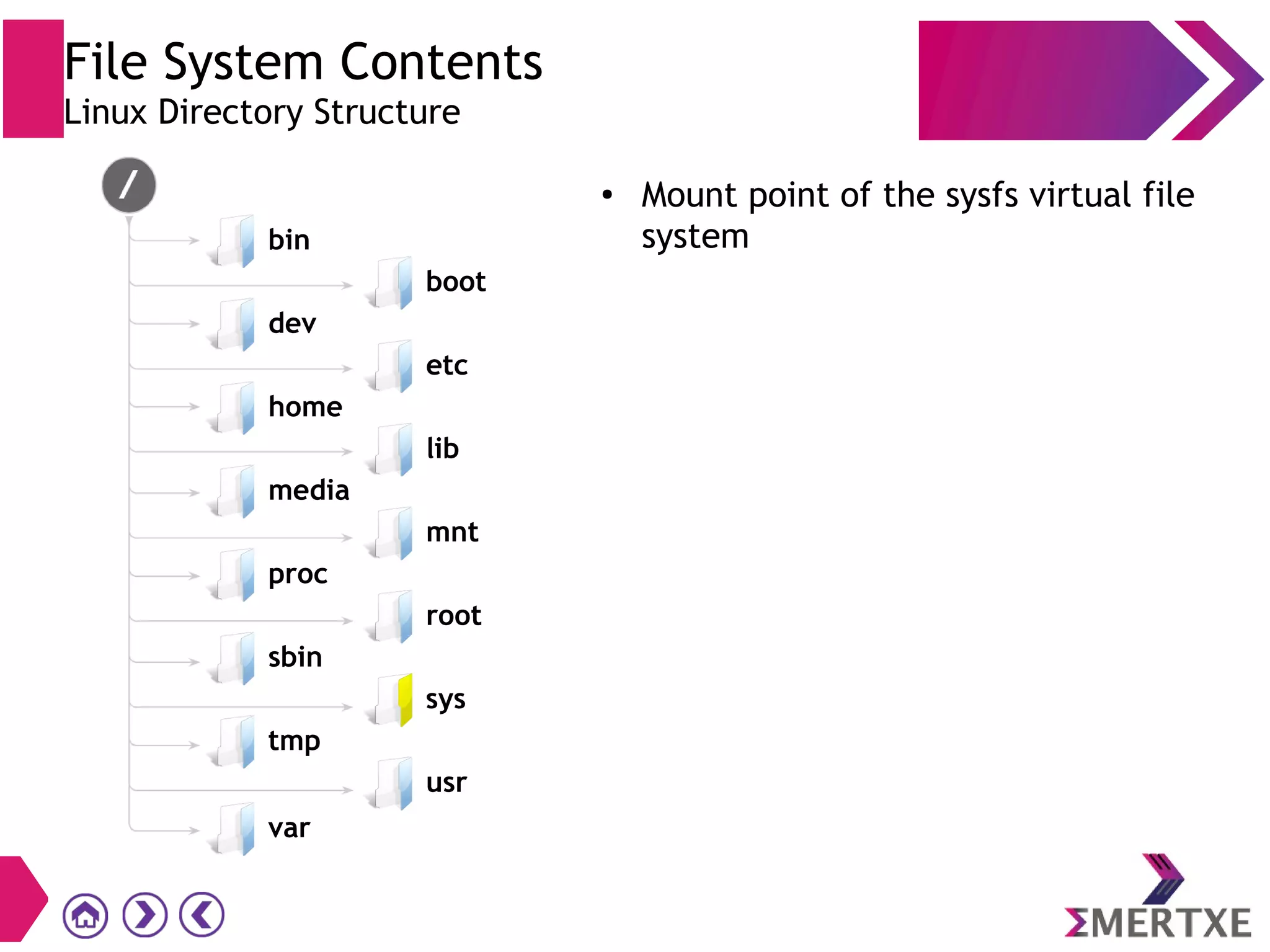
Detailed overview of the Linux directory structure organization, including important directories and their functions within the file system.
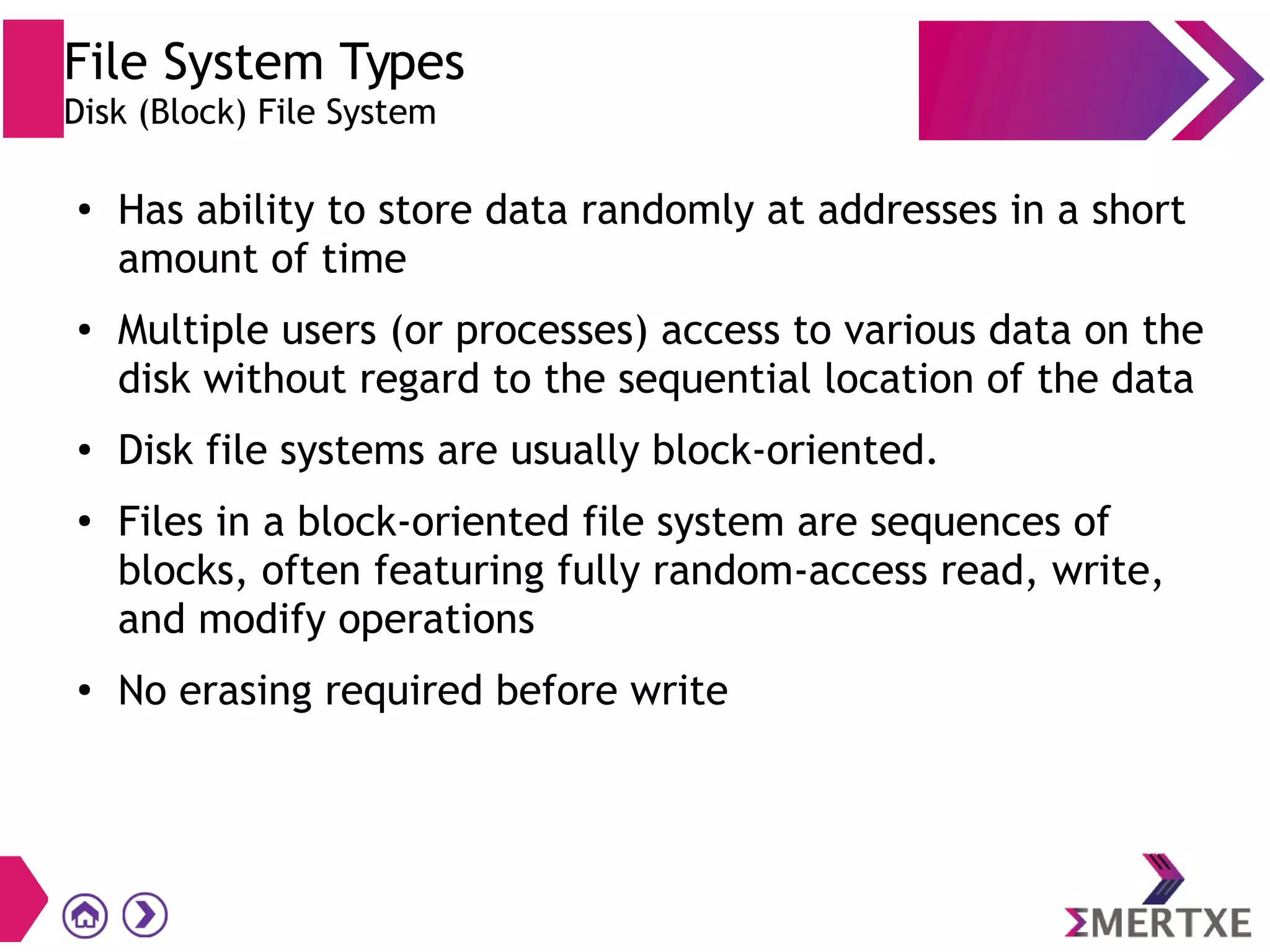
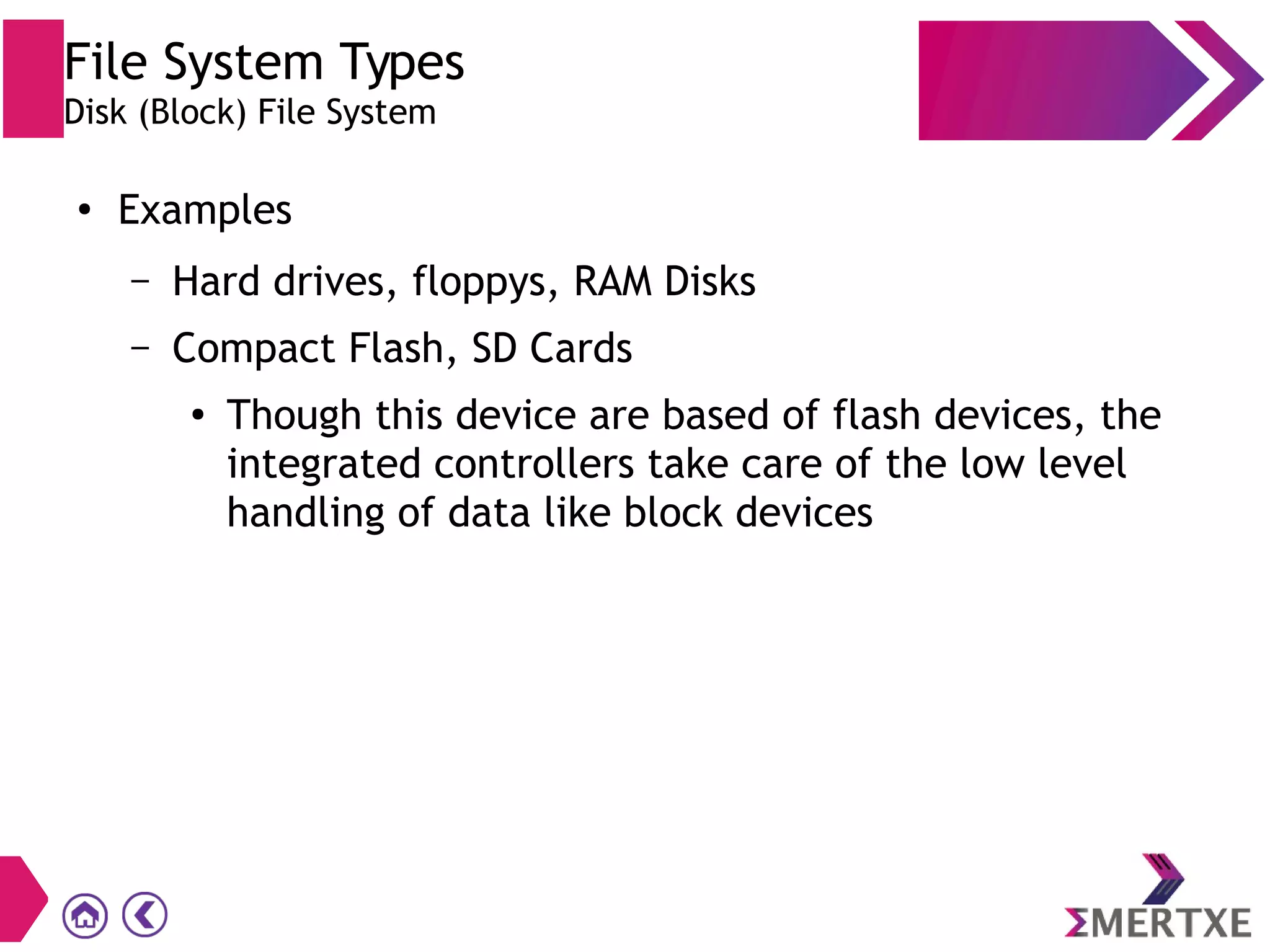
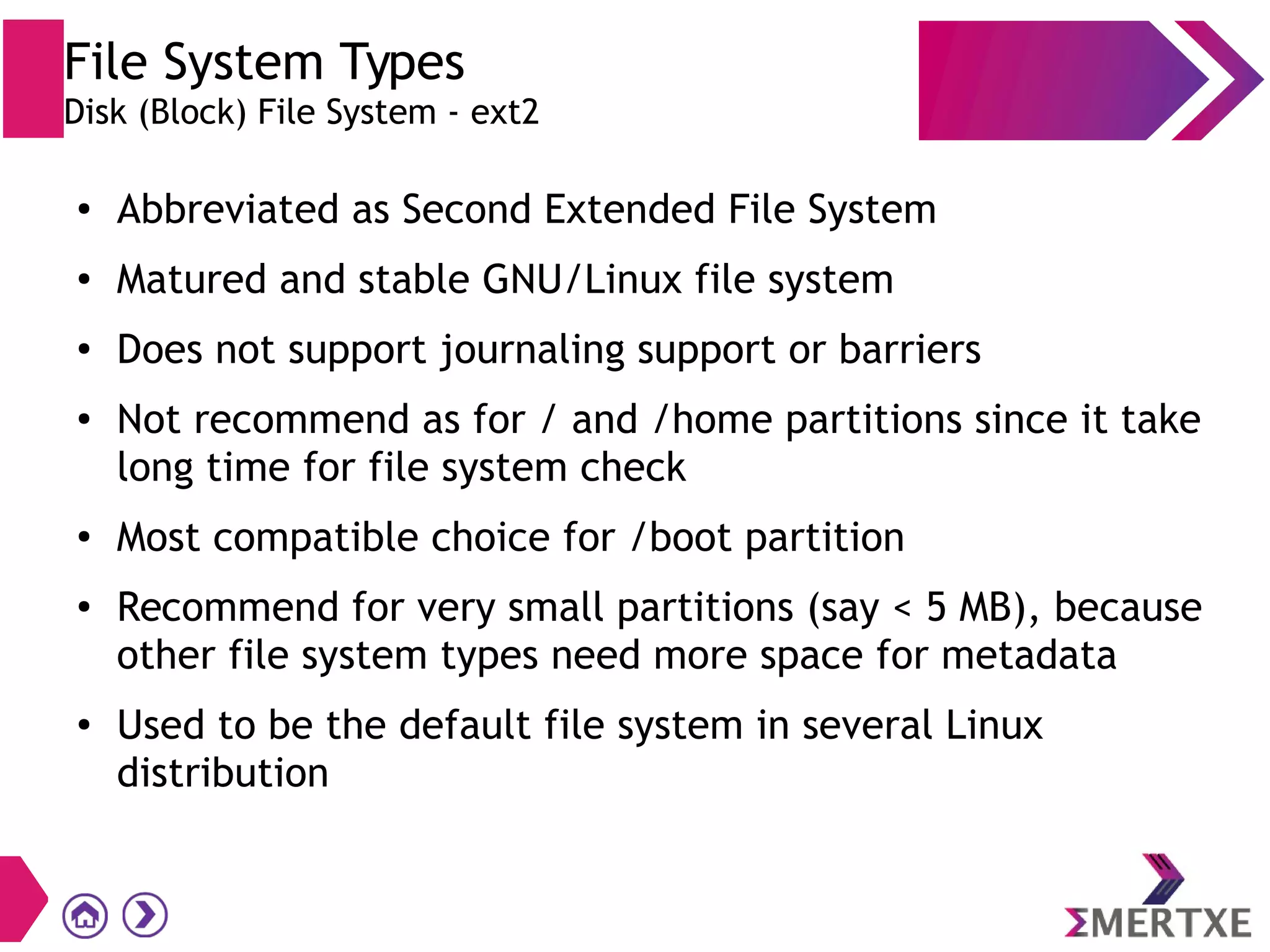
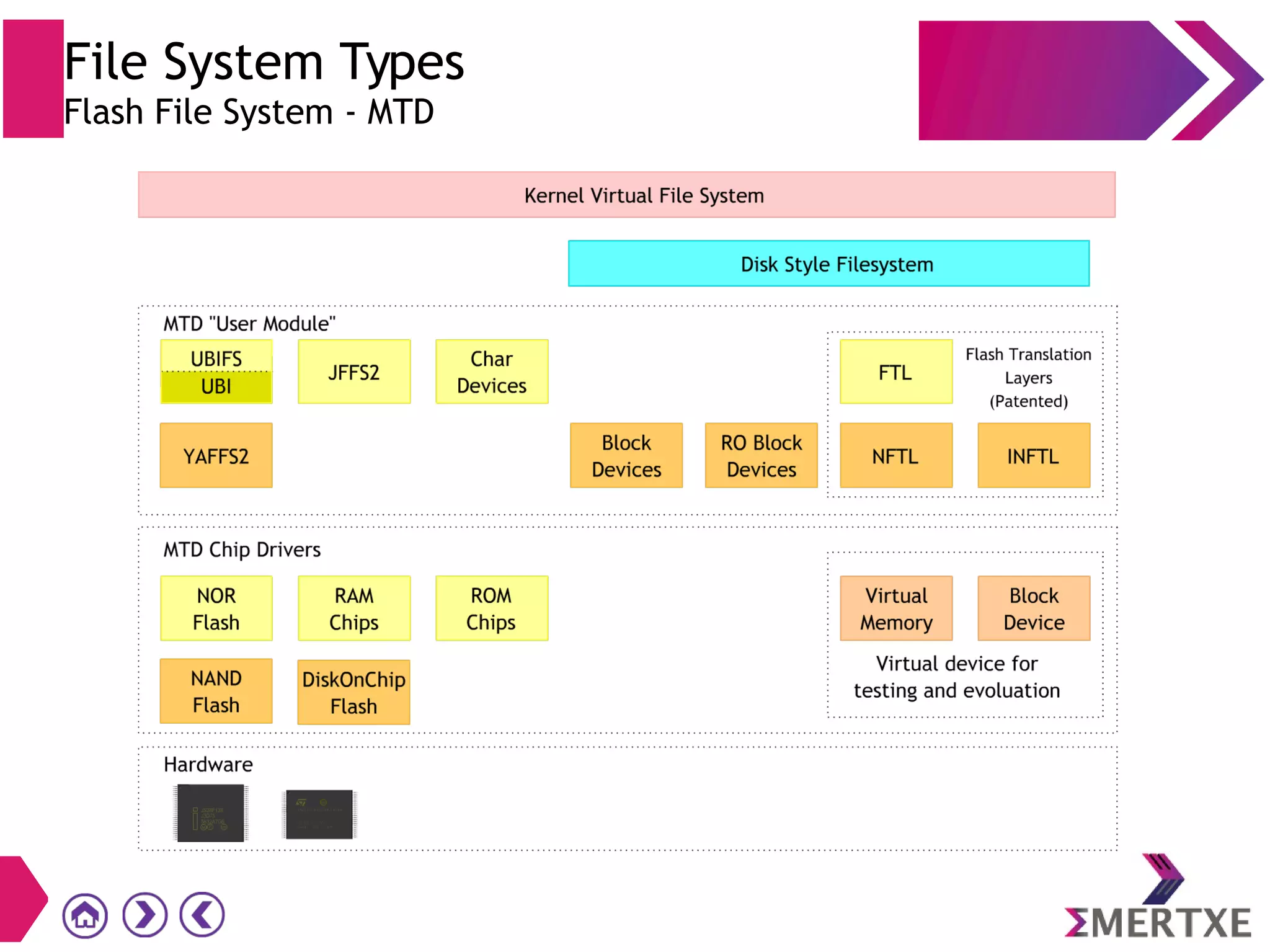
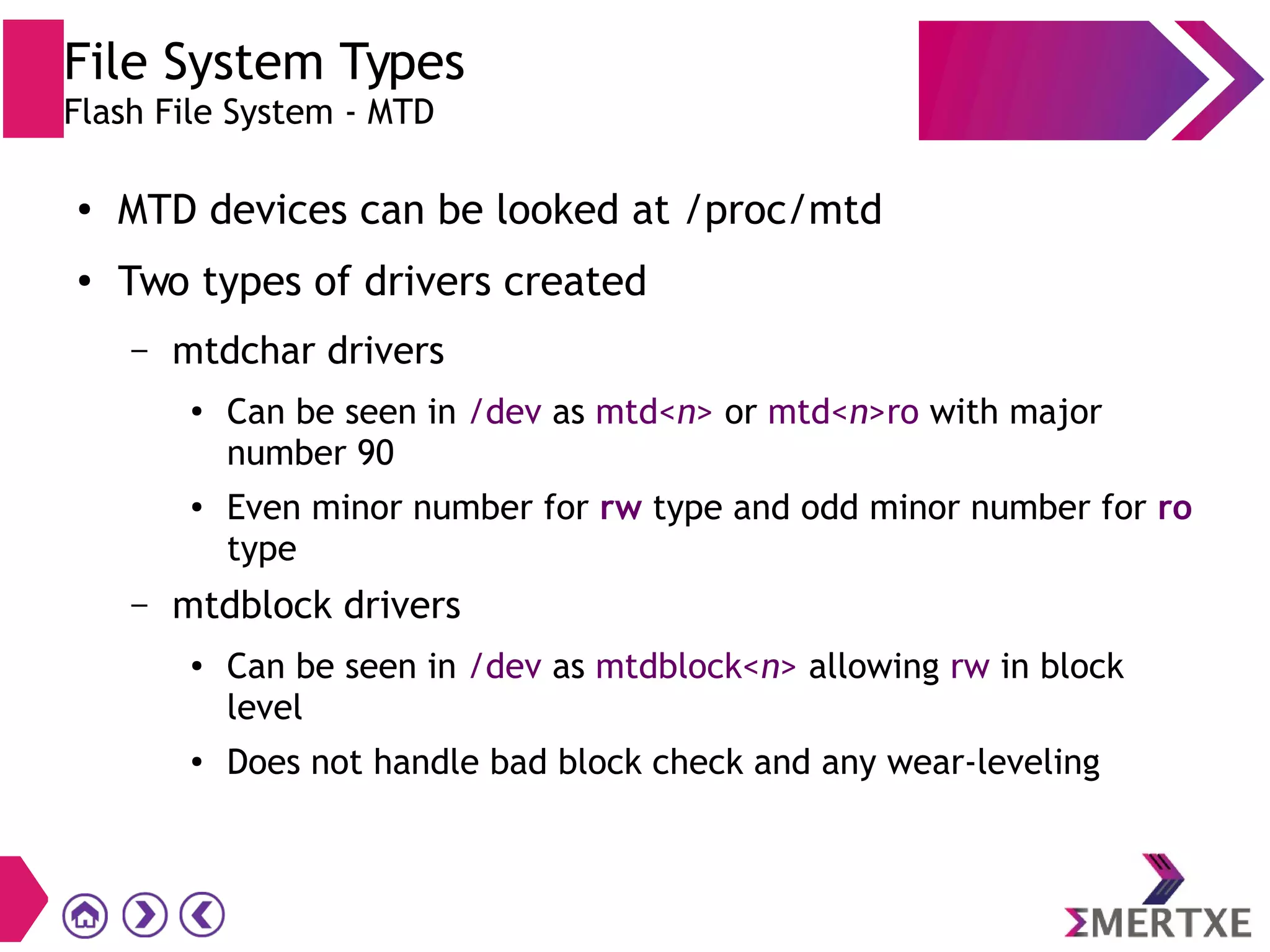
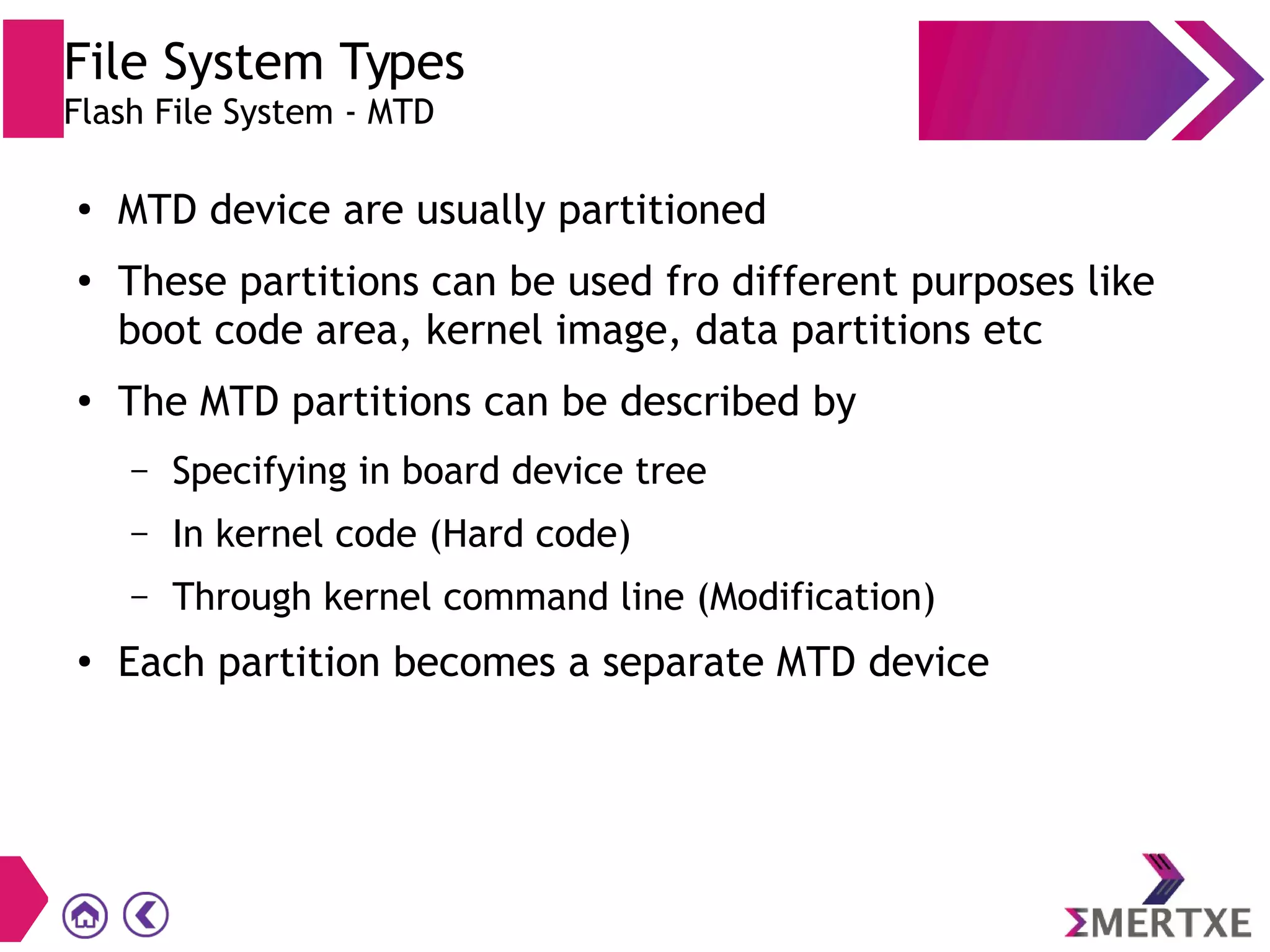
Introduction to various types of file systems, focusing on RAM file systems, block file systems, and flash file systems, along with their characteristics.
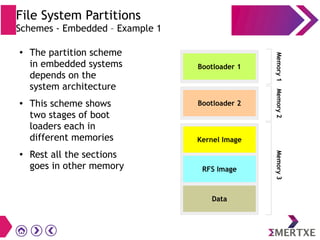
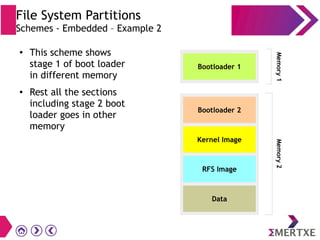
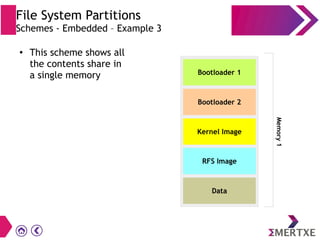
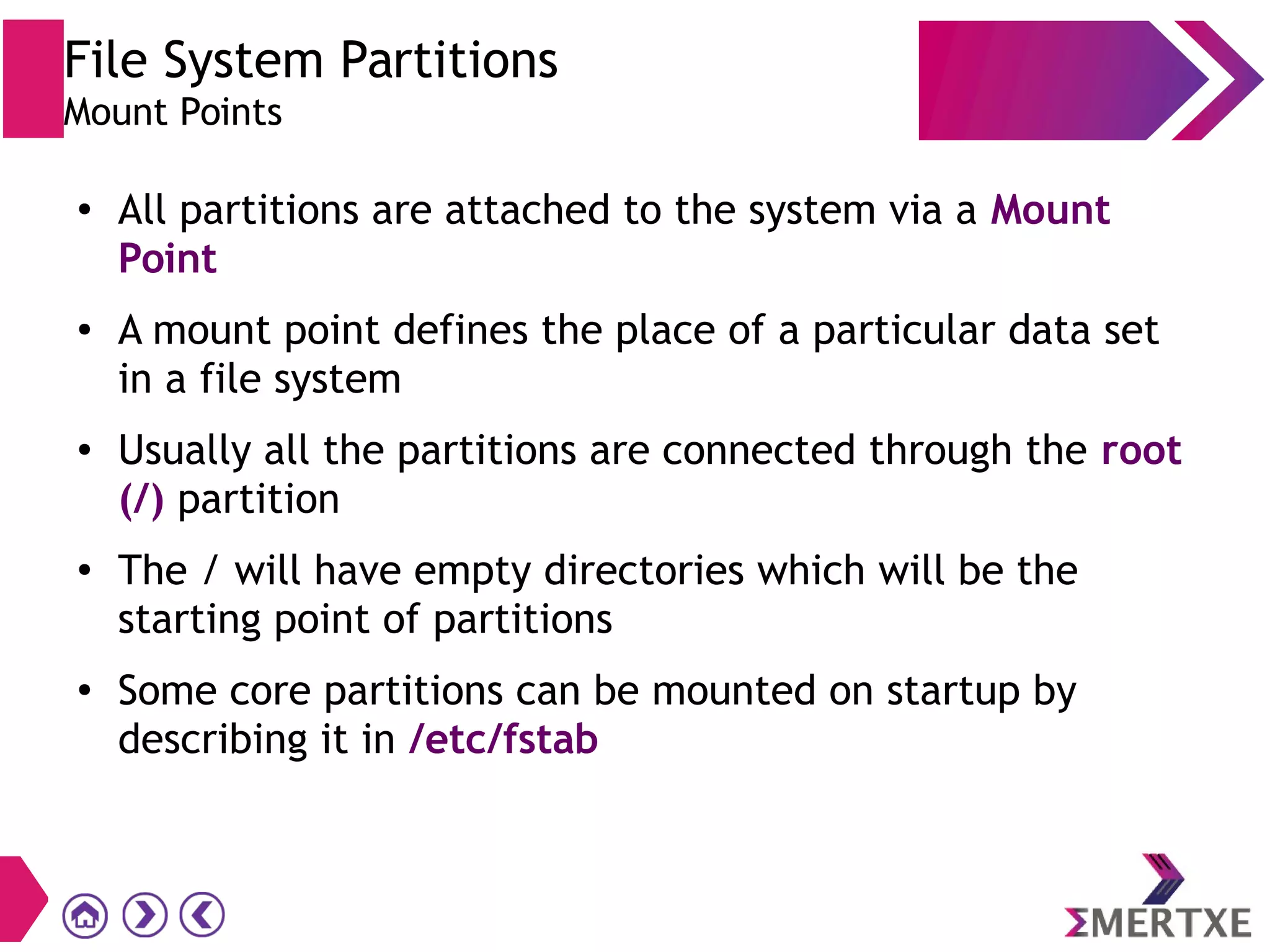
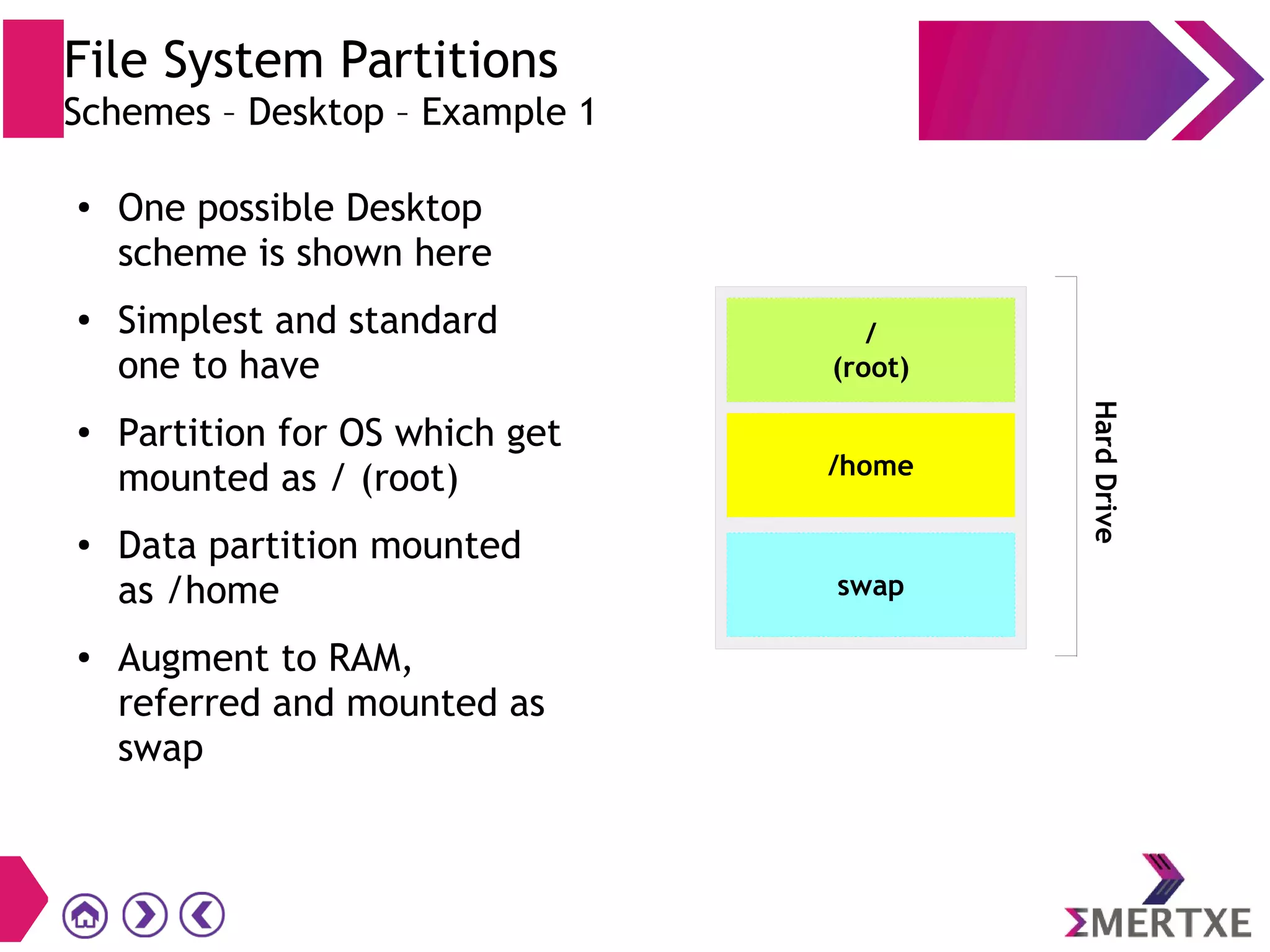
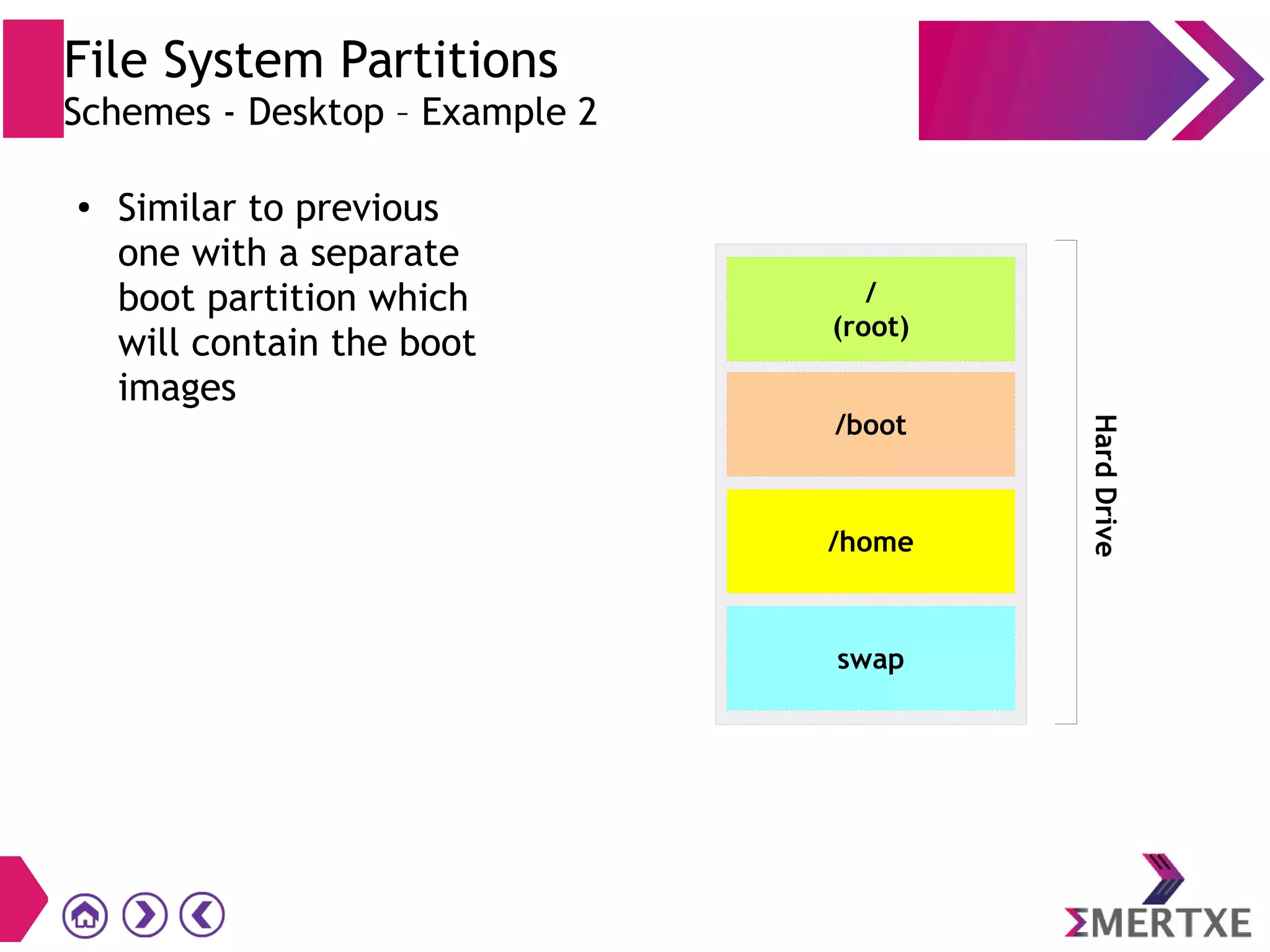
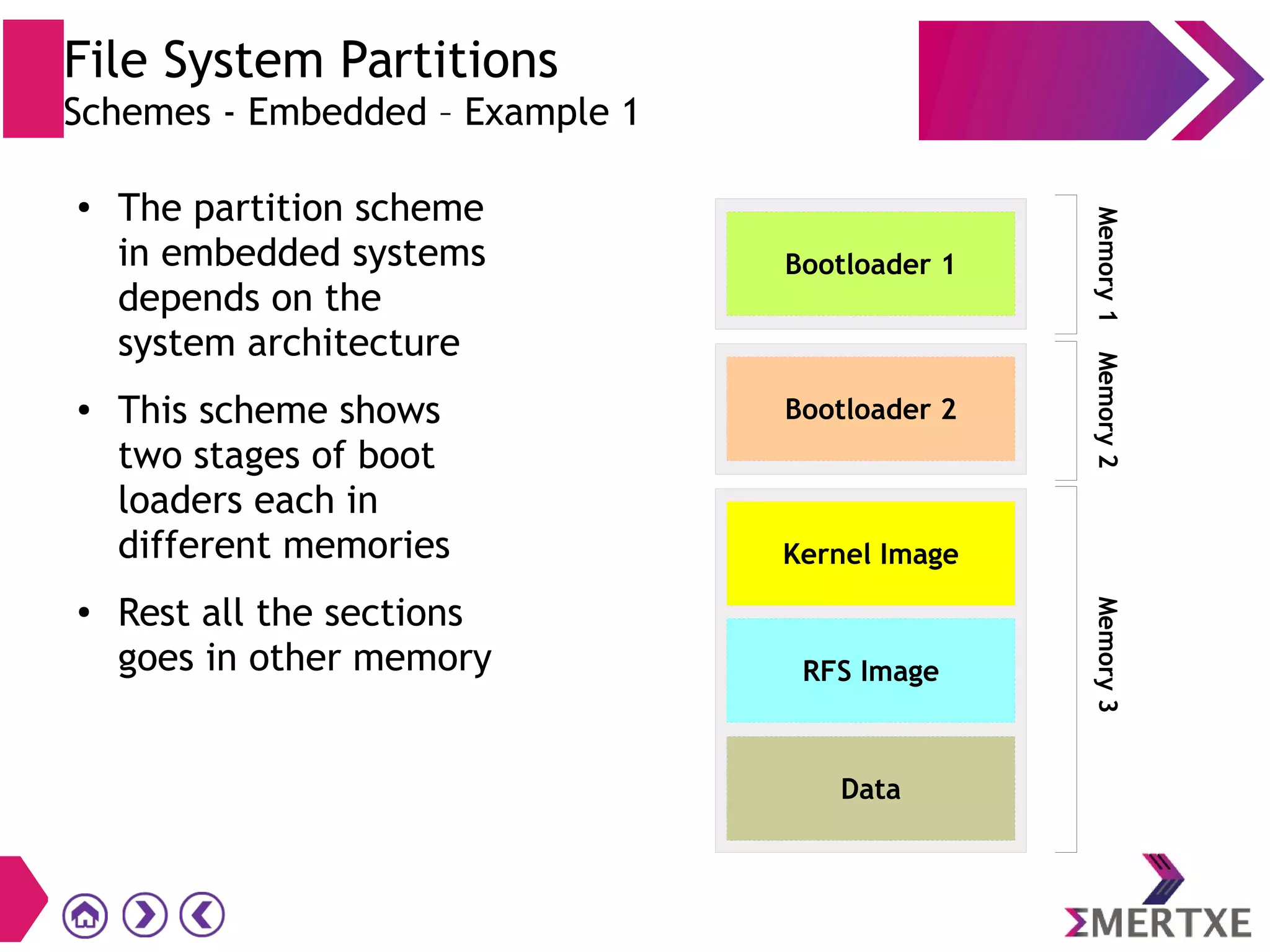
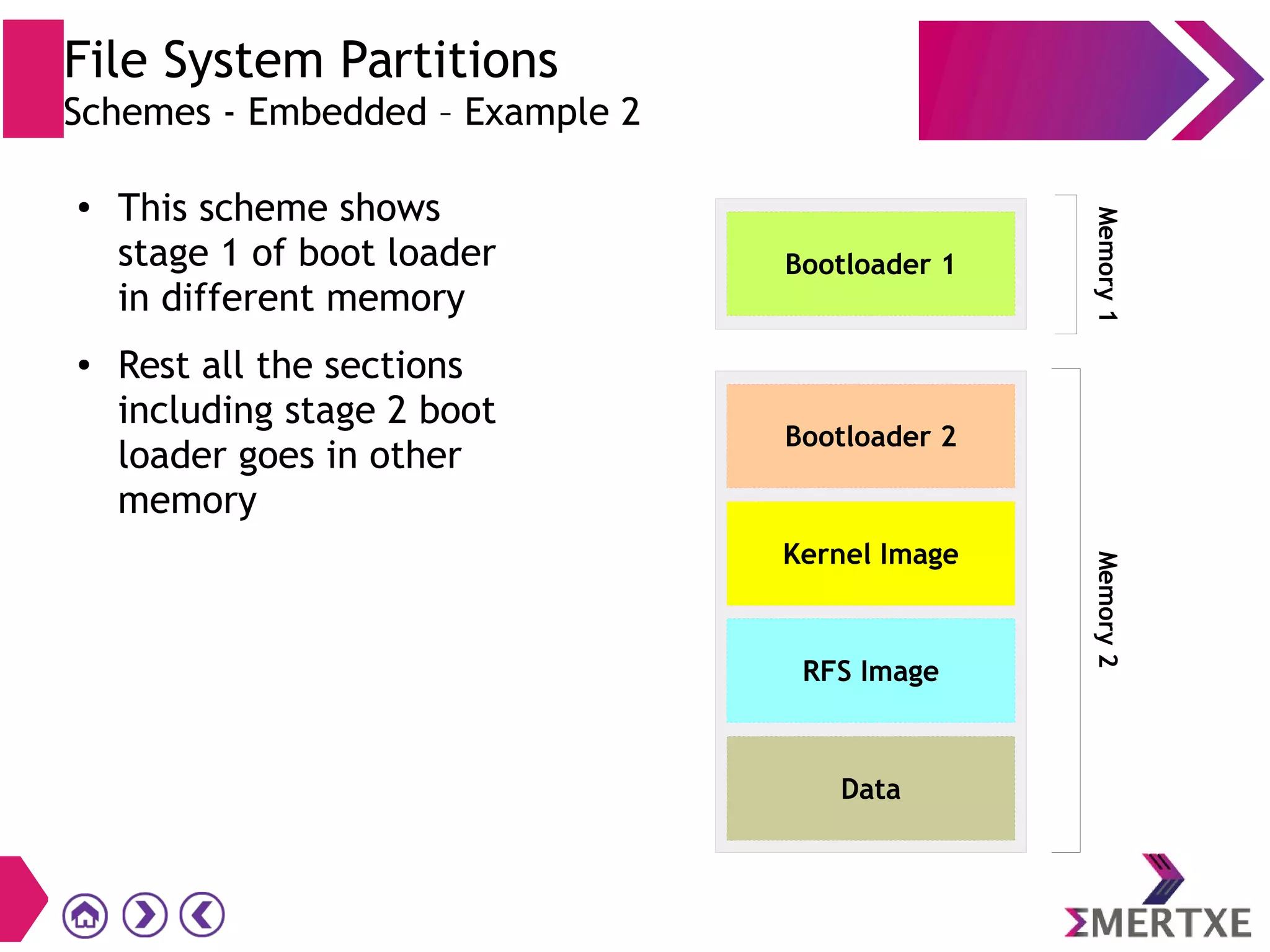
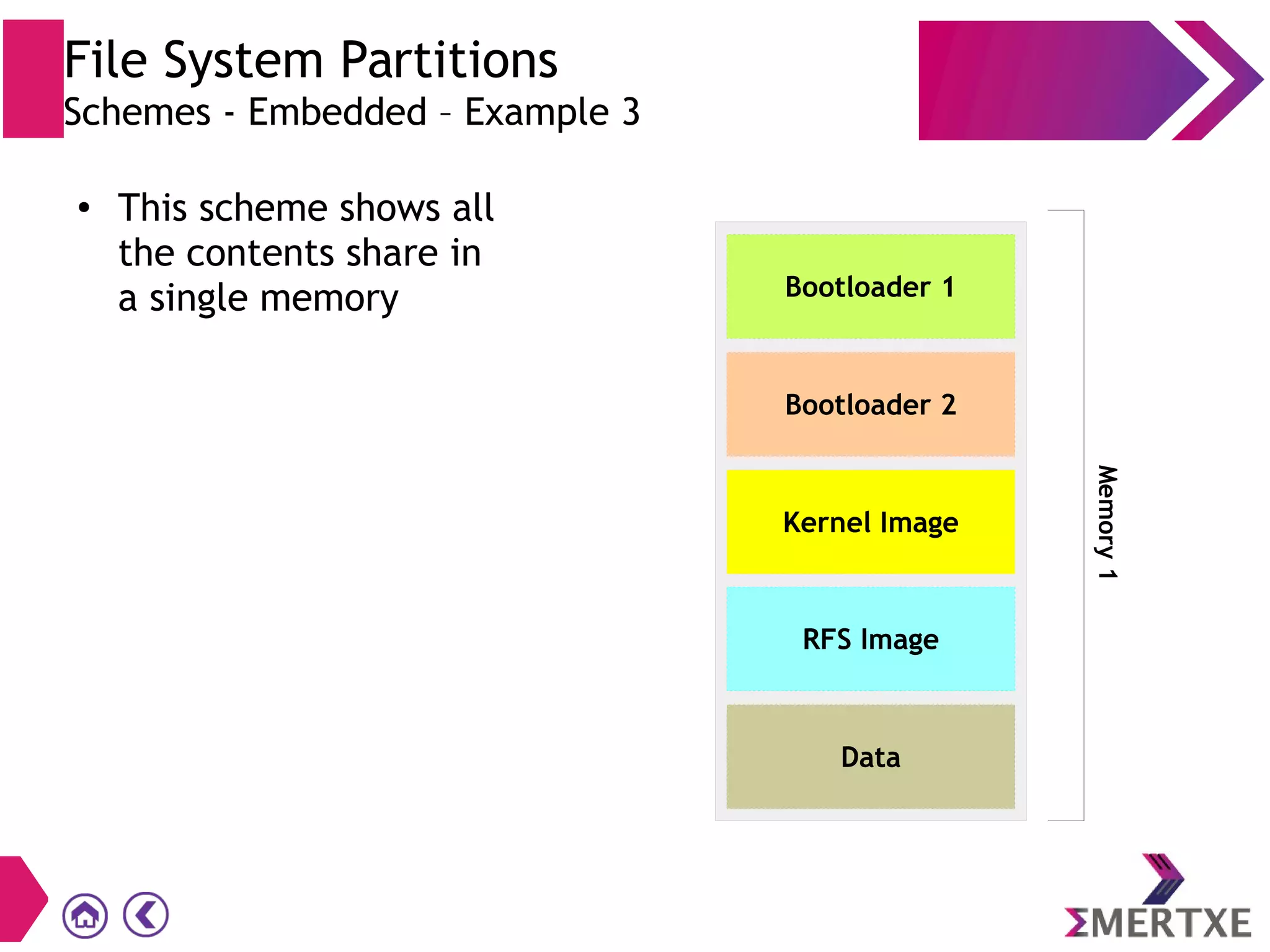
Explanation of partition schemes in Linux, especially in embedded systems, outlining various mounting strategies and their purposes.
Discussion on creating file systems from scratch in embedded systems, highlighting BusyBox as a practical solution for building small systems.
Overview of BusyBox as a compact tool that integrates essential command-line utilities for embedded Linux environments.
Steps for configuring, compiling, and installing BusyBox in an embedded Linux environment, detailing options for customization.
Concluding slide thanking the audience for their attention during the presentation.























































































