Downloaded 588 times

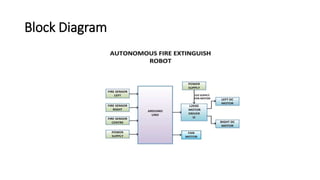
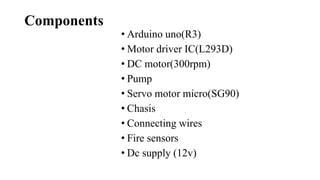
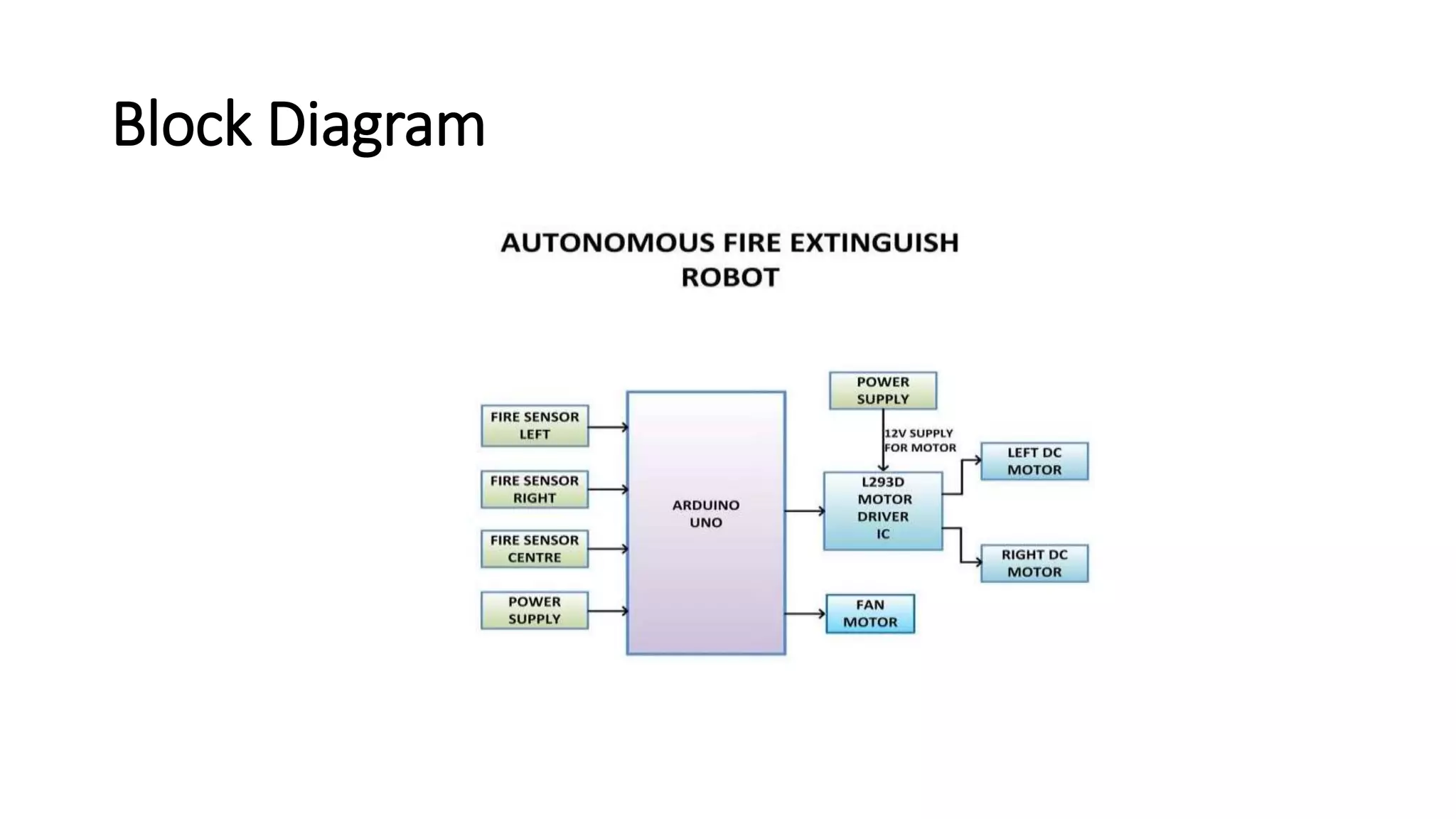
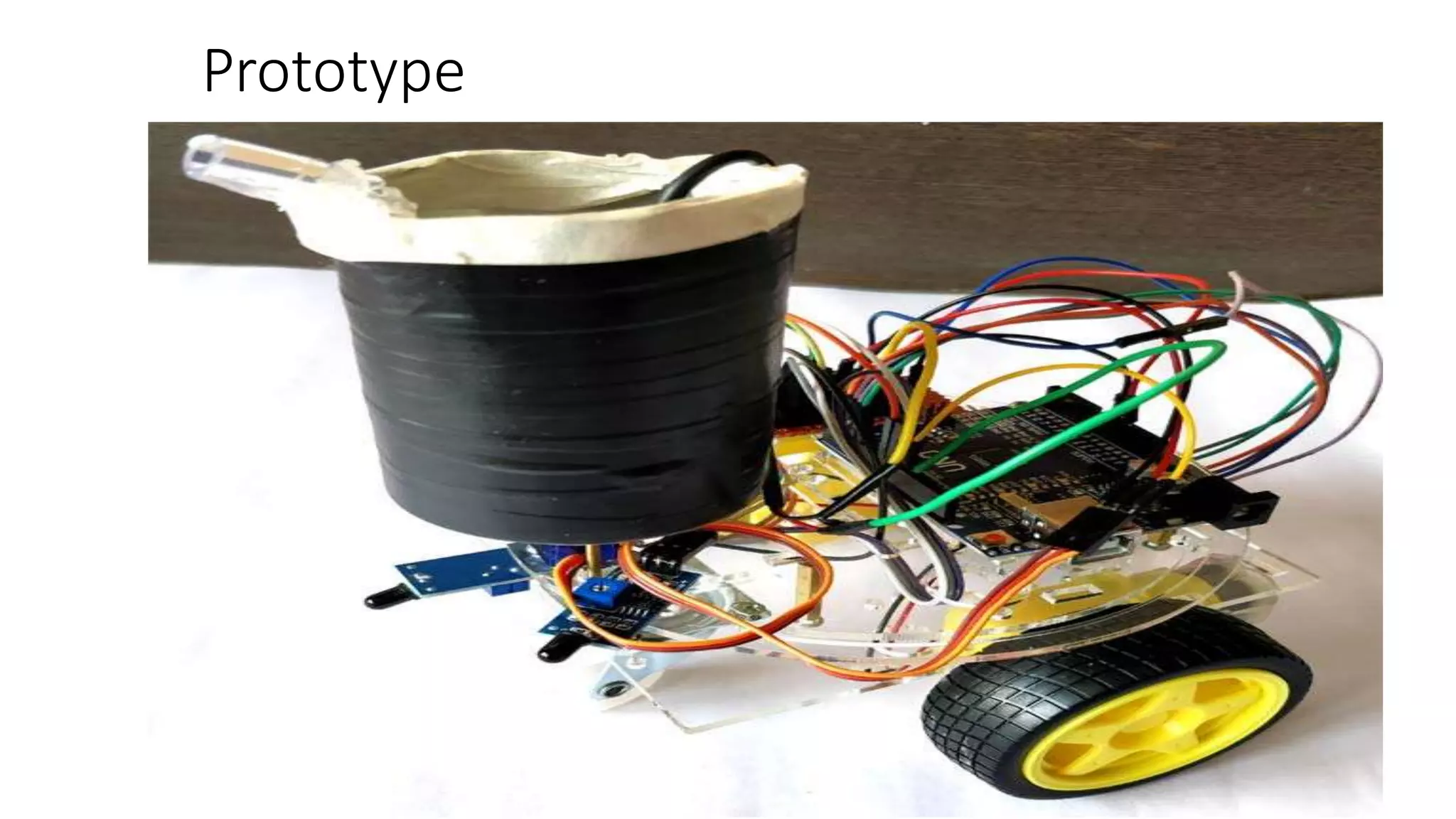

The document outlines the design and functionality of an autonomous fire extinguishing robot, which operates independently to detect and extinguish fires in various settings. Key components include an Arduino microcontroller, motor drivers, fire sensors, and a water pump, allowing the robot to navigate and extinguish fires accurately. The project aims to mitigate fire-related accidents and save lives and property by enhancing fire response capabilities.









































































