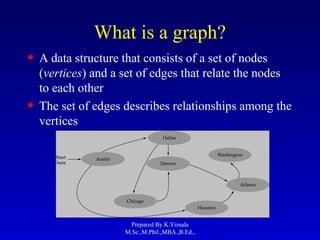
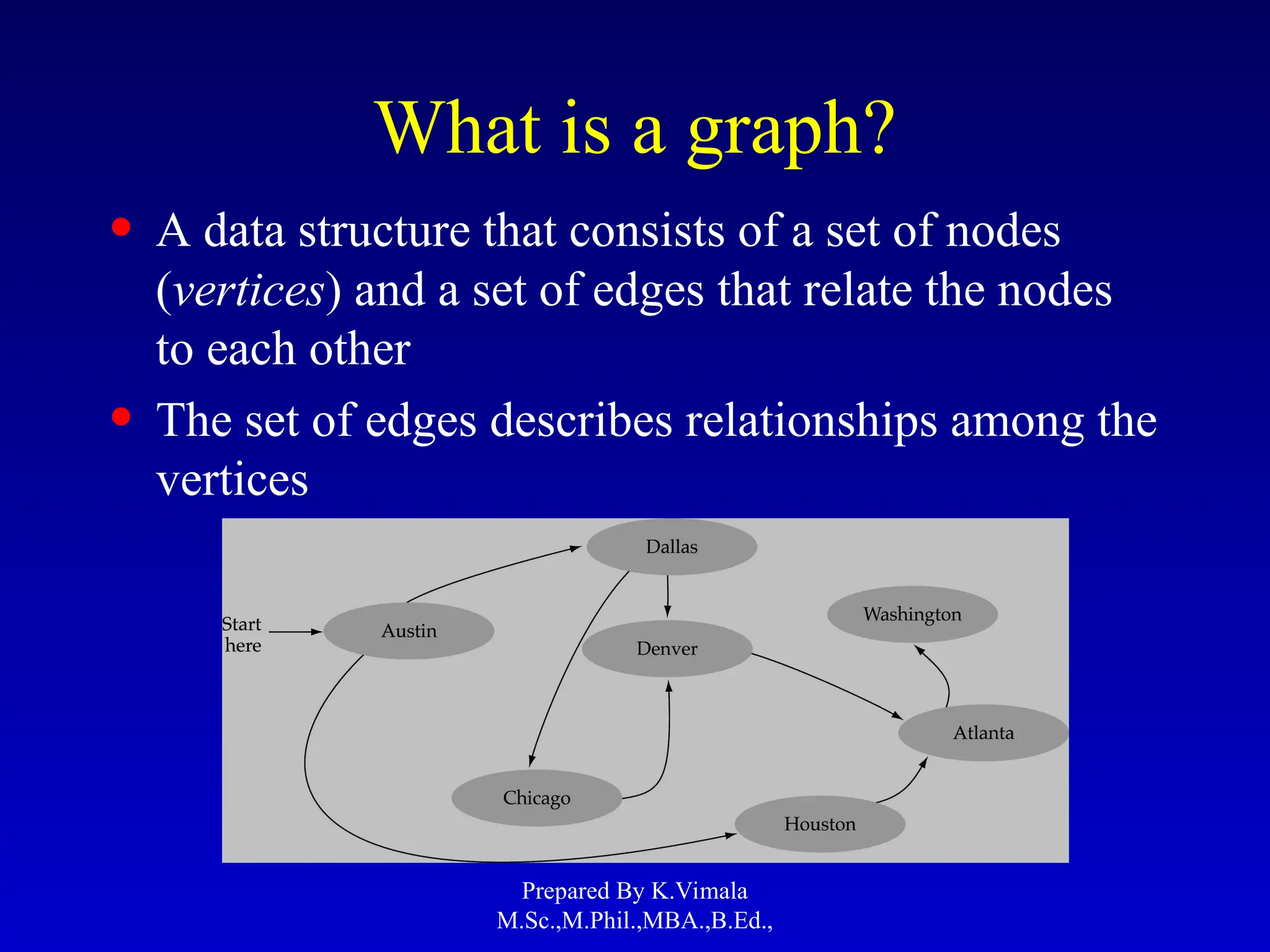
What is agraph?
• A data structure that consists of a set of nodes
(vertices) and a set of edges that relate the nodes
to each other
• The set of edges describes relationships among the
vertices
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
3.
Formal definition ofgraphs
• A graph G is defined as follows:
G=(V,E)
V(G): a finite, nonempty set of
vertices
E(G): a set of edges (pairs of vertices)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
4.
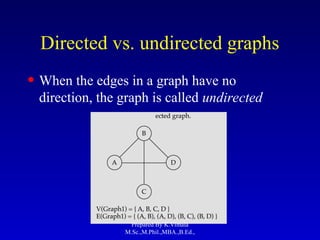
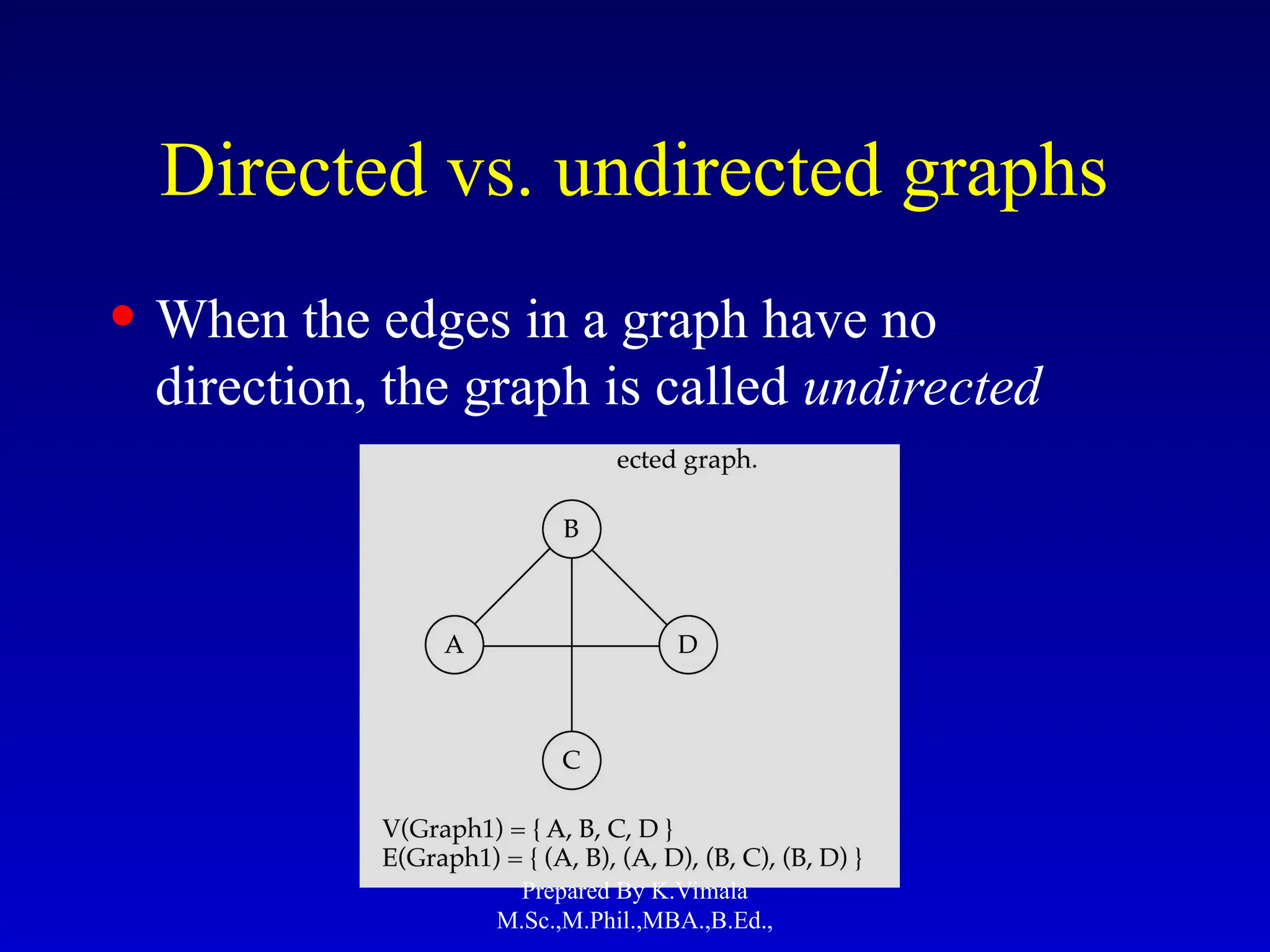
Directed vs. undirectedgraphs
• When the edges in a graph have no
direction, the graph is called undirected
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
5.
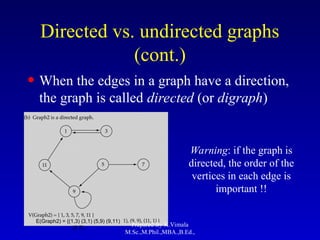
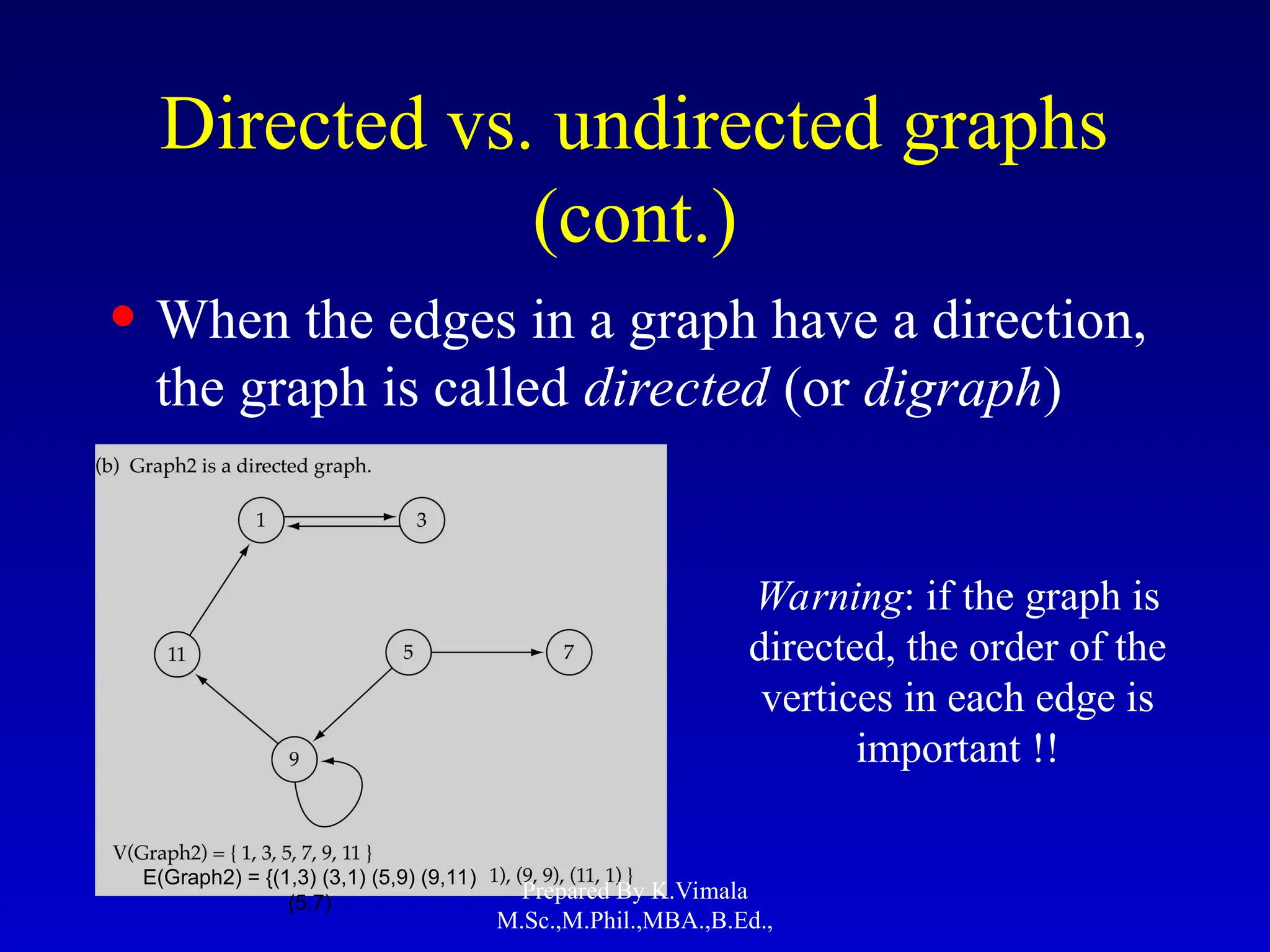
• When theedges in a graph have a direction,
the graph is called directed (or digraph)
Directed vs. undirected graphs
(cont.)
E(Graph2) = {(1,3) (3,1) (5,9) (9,11)
(5,7)
Warning: if the graph is
directed, the order of the
vertices in each edge is
important !!
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
6.
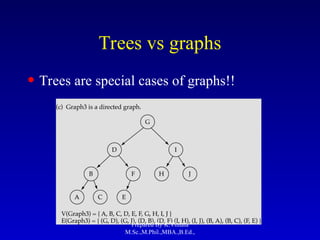
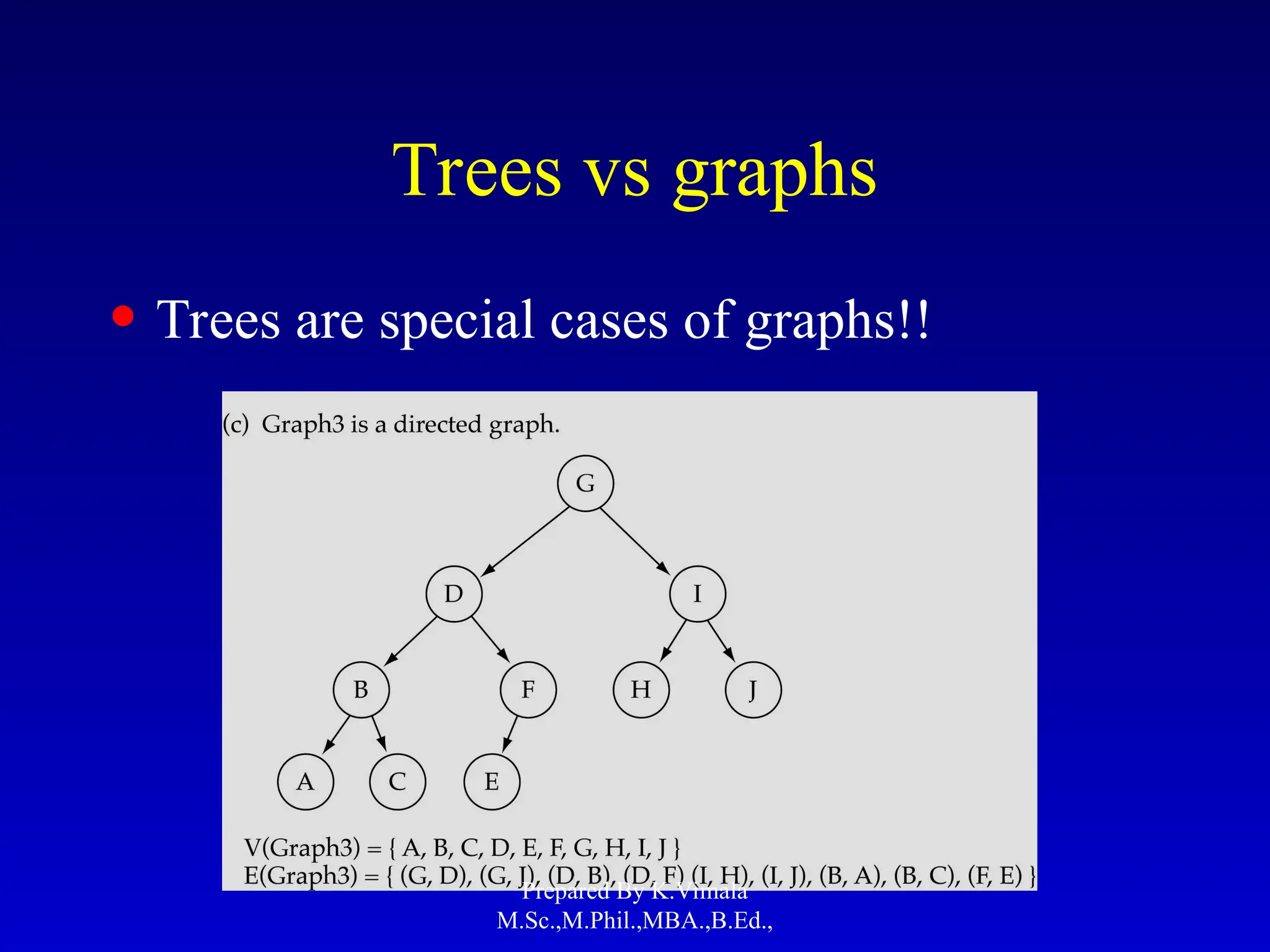
• Trees arespecial cases of graphs!!
Trees vs graphs
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
7.
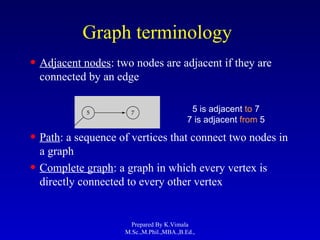
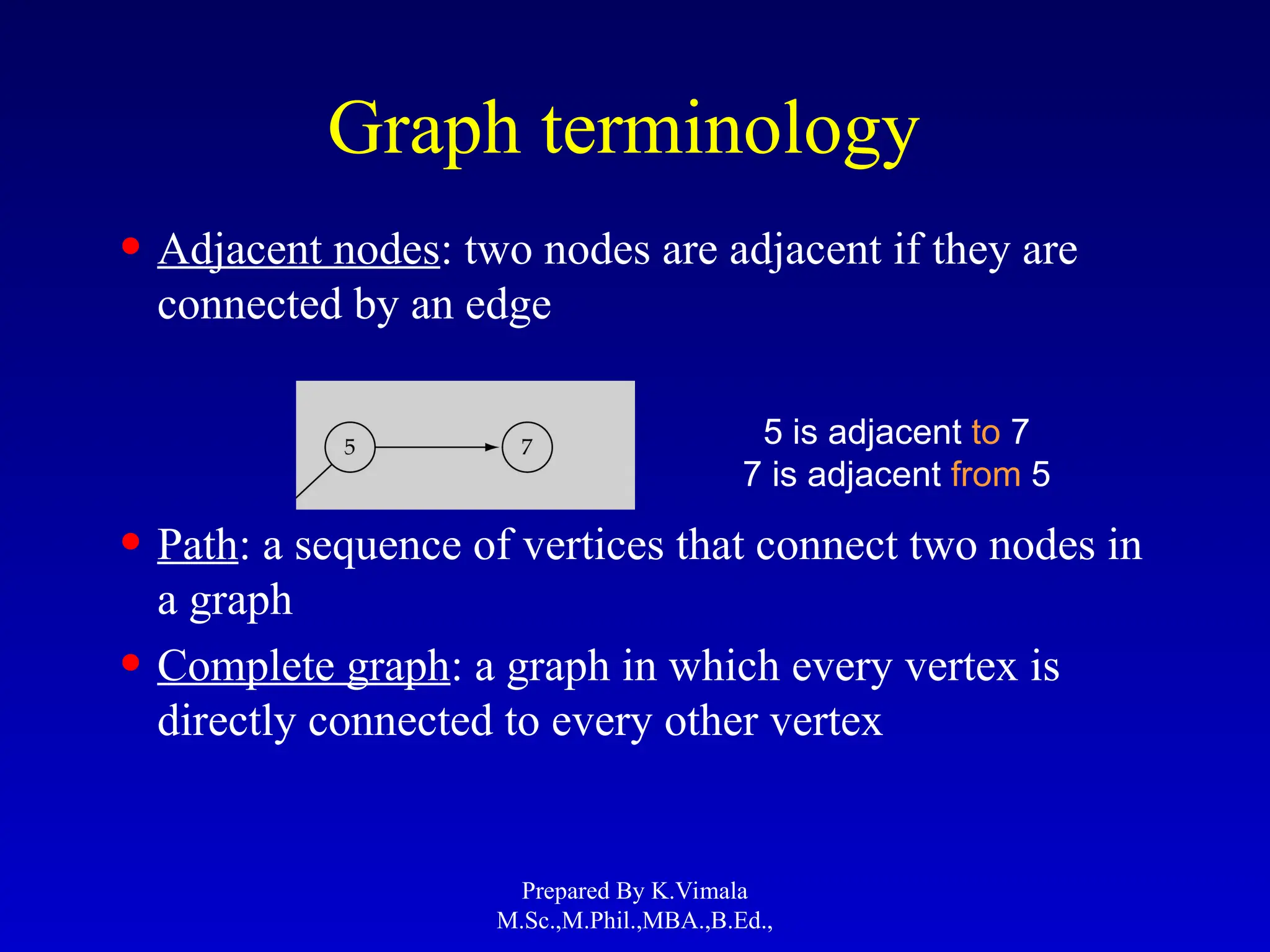
Graph terminology
• Adjacentnodes: two nodes are adjacent if they are
connected by an edge
• Path: a sequence of vertices that connect two nodes in
a graph
• Complete graph: a graph in which every vertex is
directly connected to every other vertex
5 is adjacent to 7
7 is adjacent from 5
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
8.
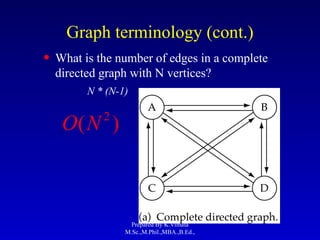
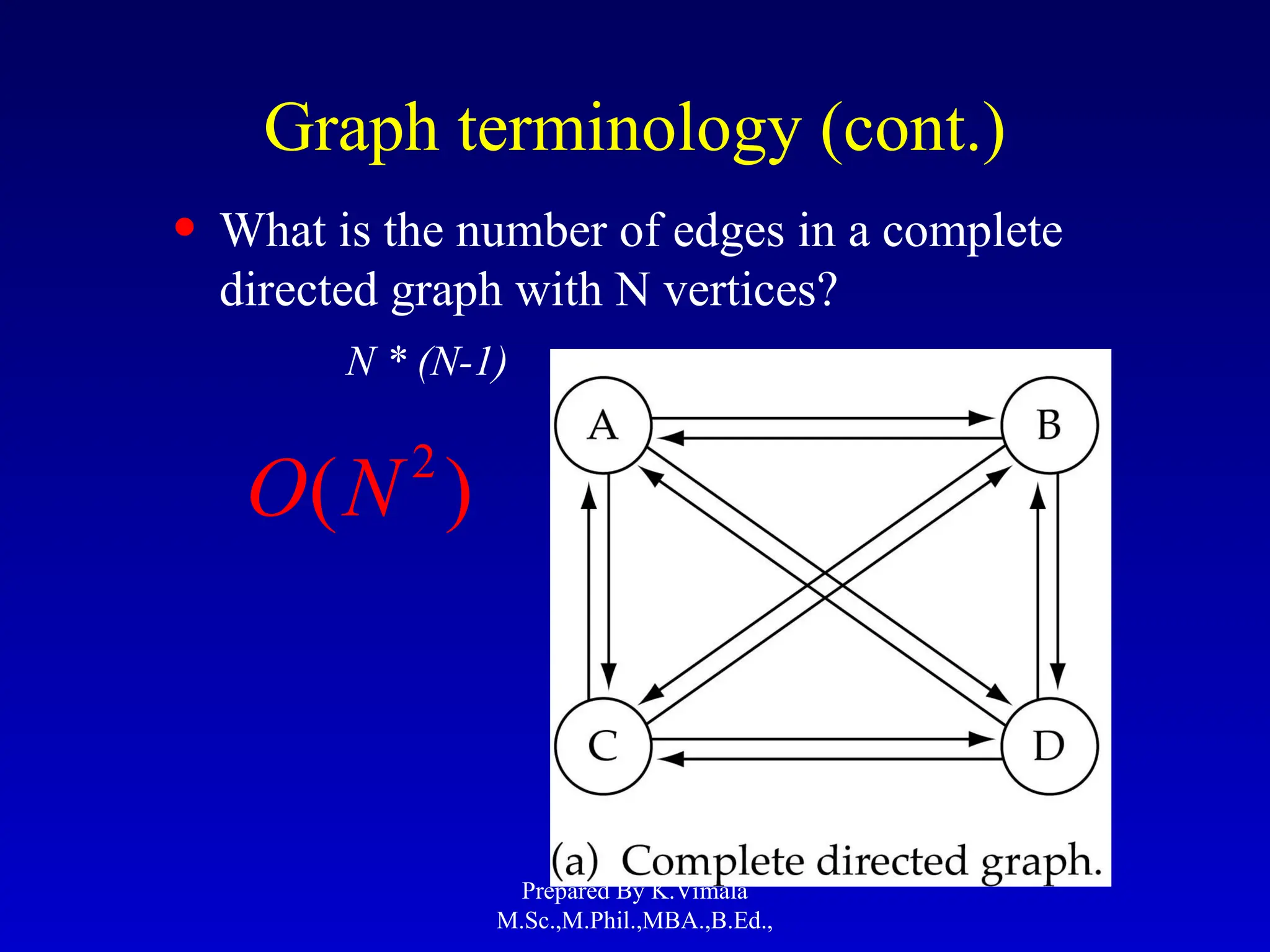
• What isthe number of edges in a complete
directed graph with N vertices?
N * (N-1)
Graph terminology (cont.)
2
( )
O N
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
9.
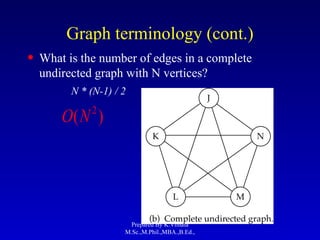
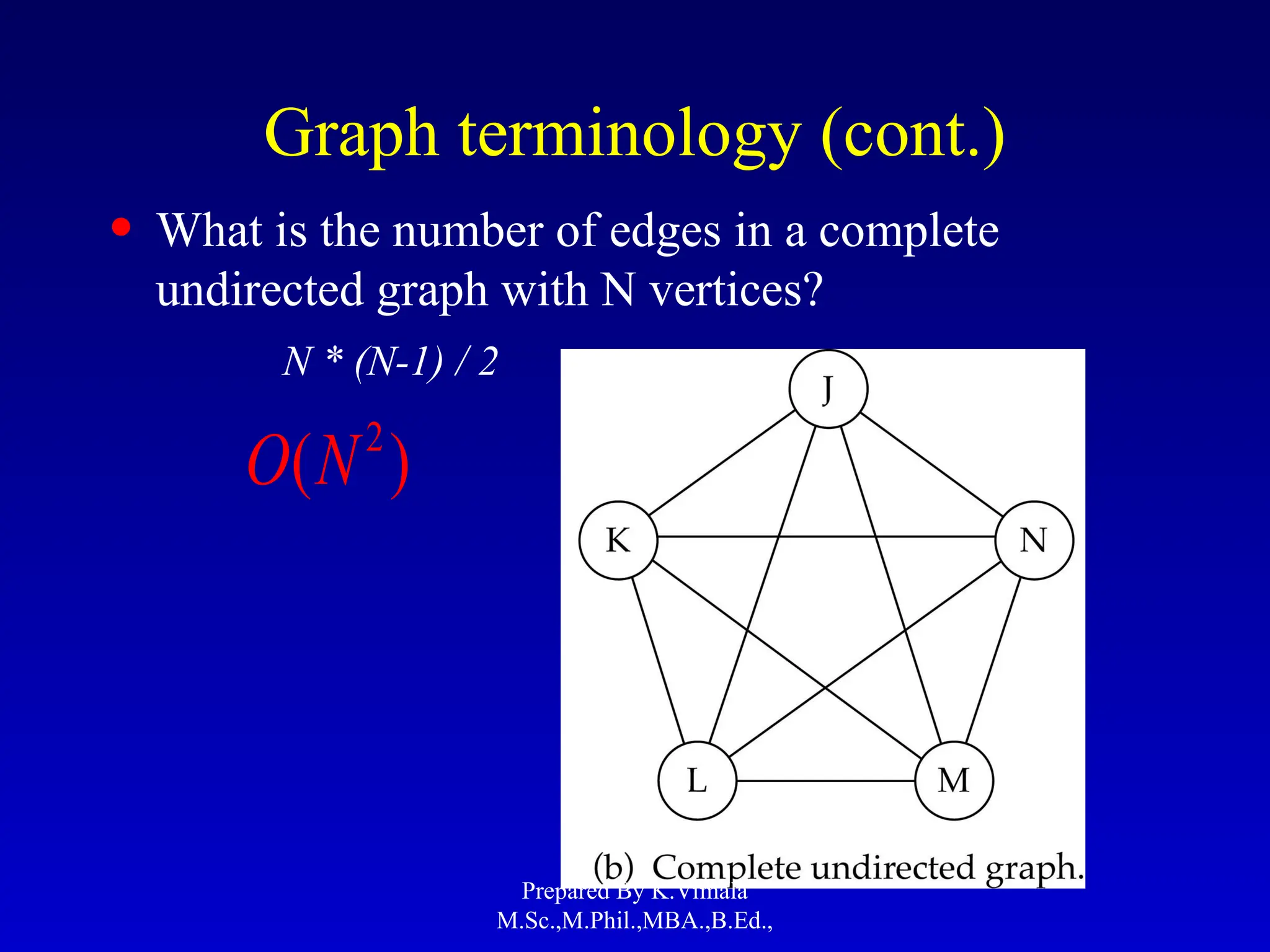
• What isthe number of edges in a complete
undirected graph with N vertices?
N * (N-1) / 2
Graph terminology (cont.)
2
( )
O N
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
10.
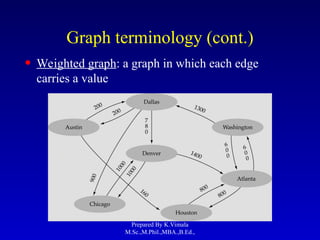
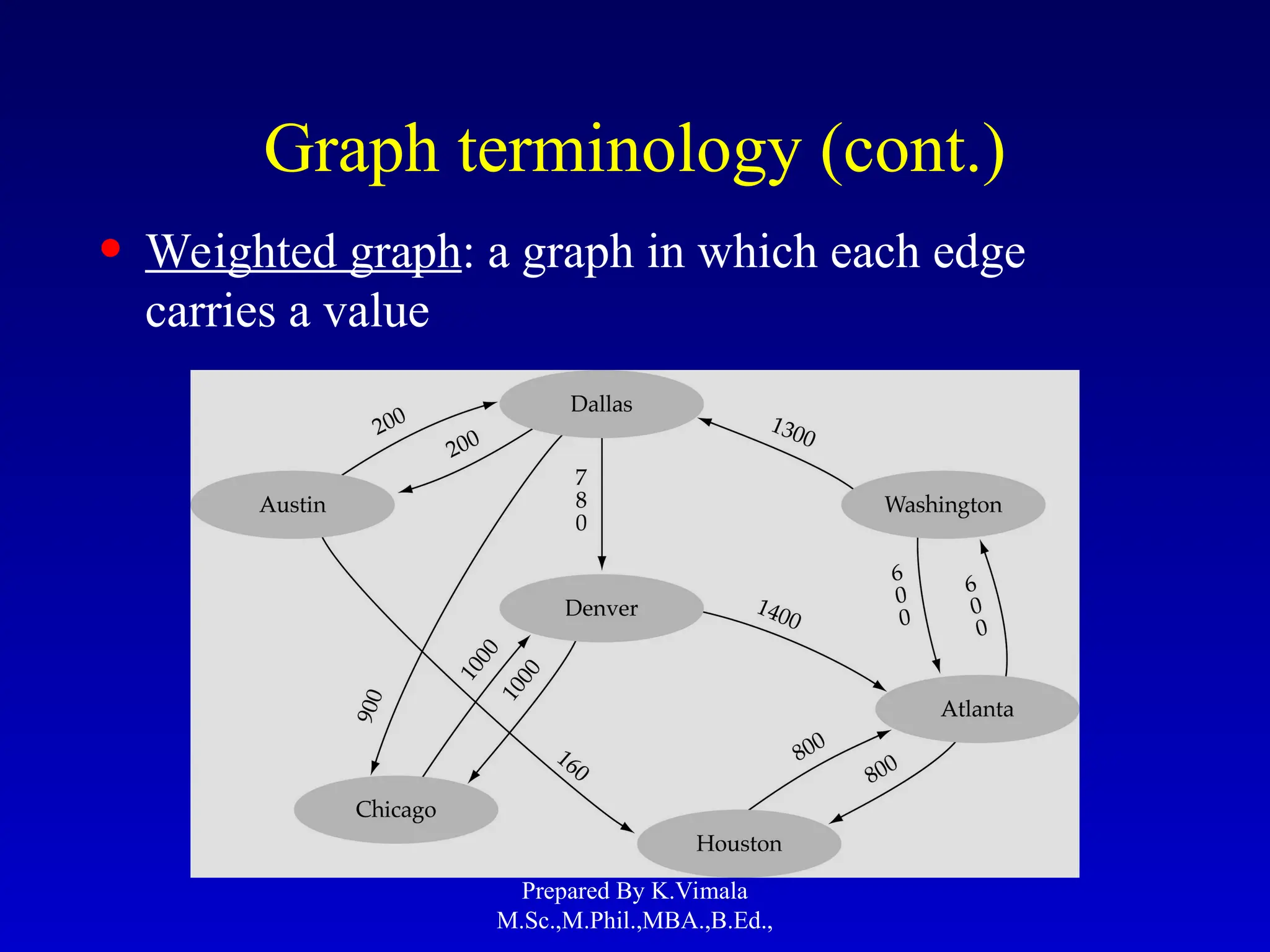
• Weighted graph:a graph in which each edge
carries a value
Graph terminology (cont.)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
11.
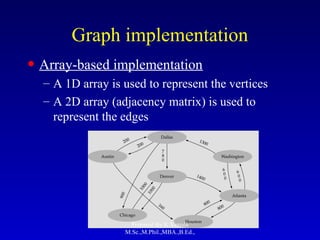
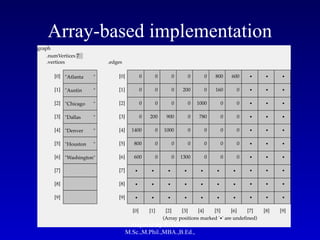
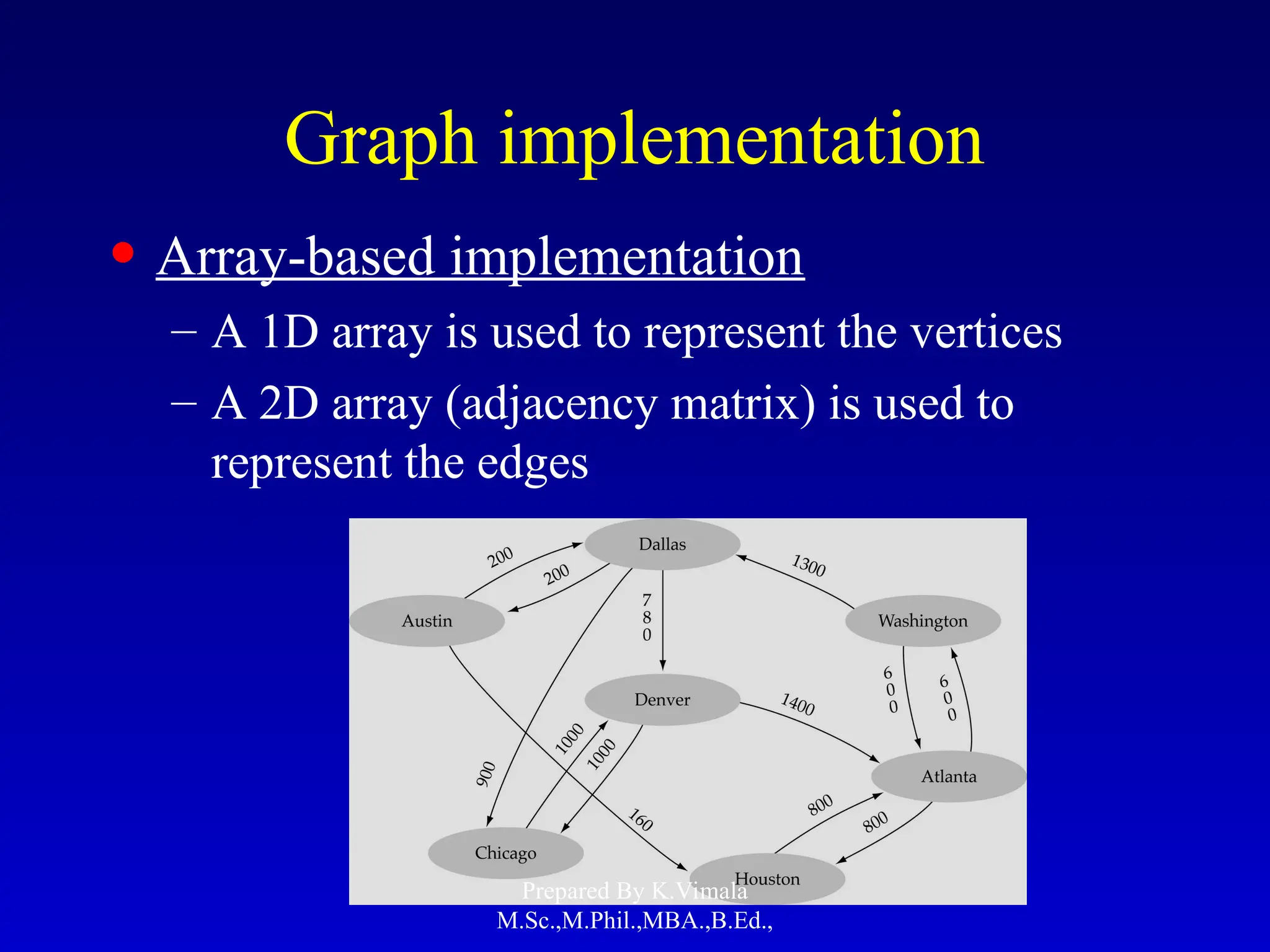
Graph implementation
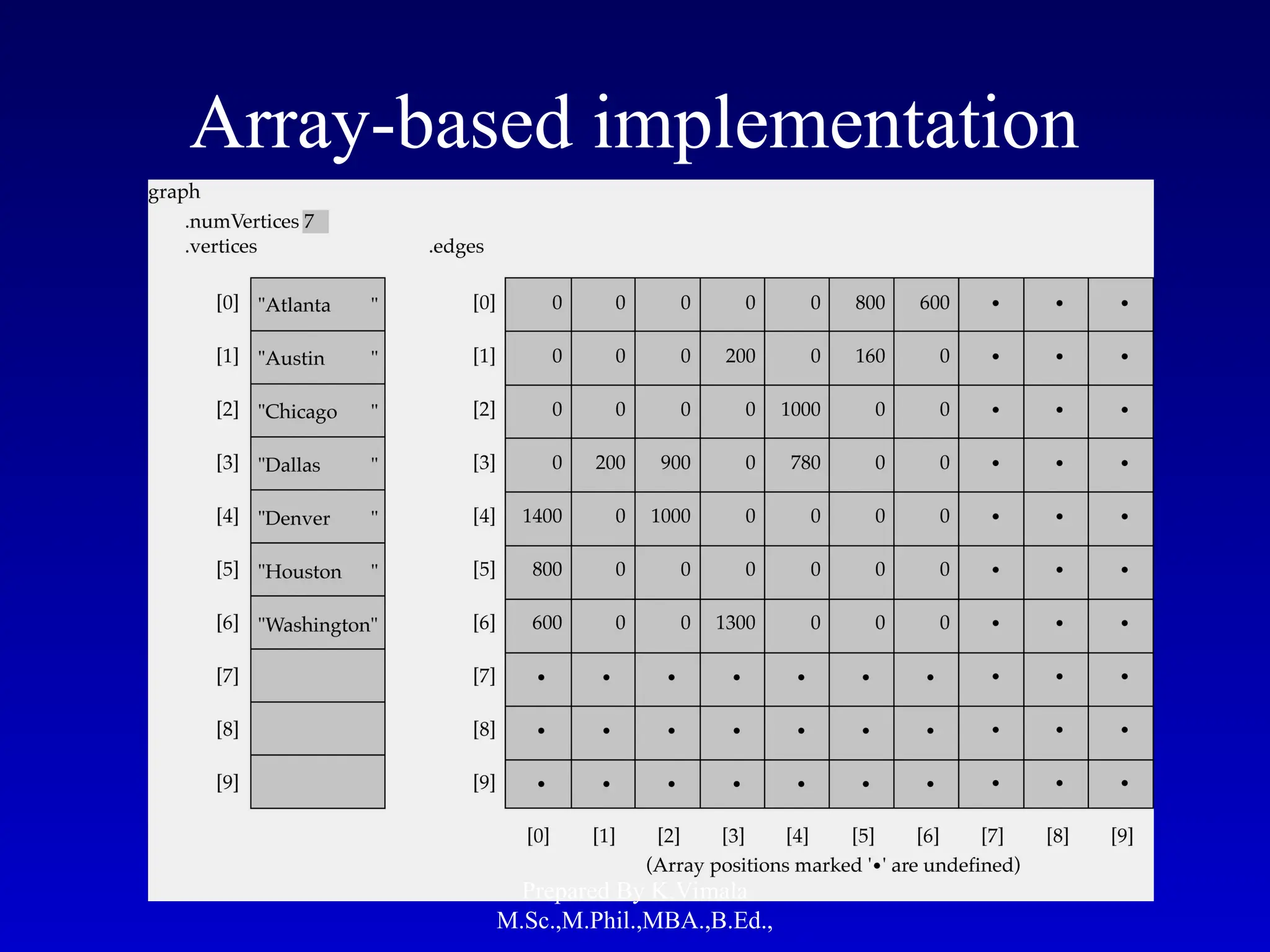
• Array-basedimplementation
– A 1D array is used to represent the vertices
– A 2D array (adjacency matrix) is used to
represent the edges
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
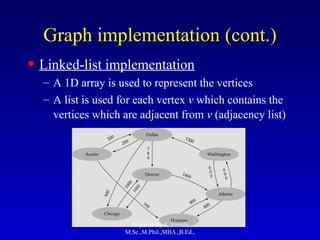
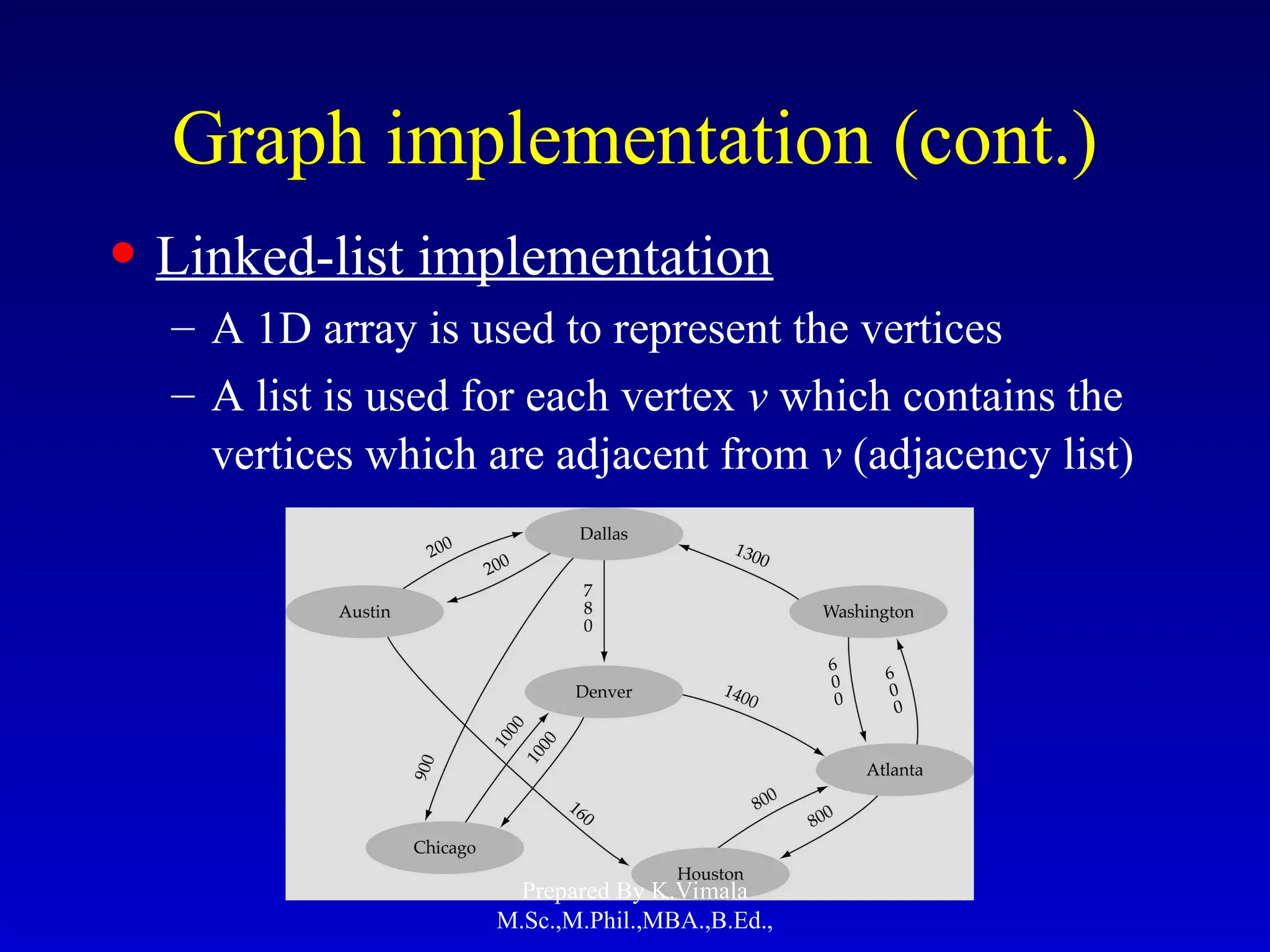
Graph implementation (cont.)
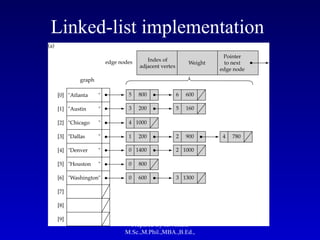
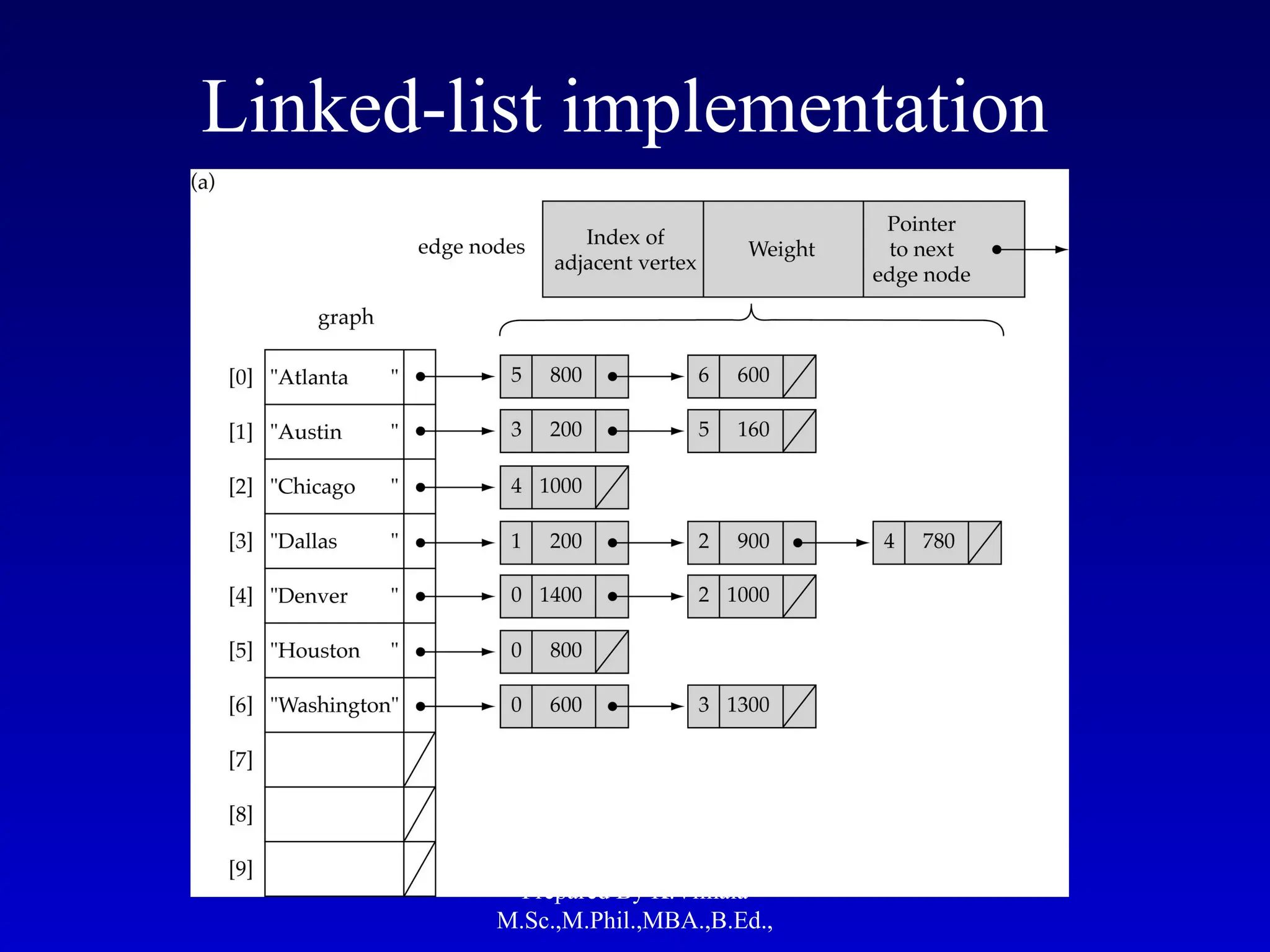
•Linked-list implementation
– A 1D array is used to represent the vertices
– A list is used for each vertex v which contains the
vertices which are adjacent from v (adjacency list)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
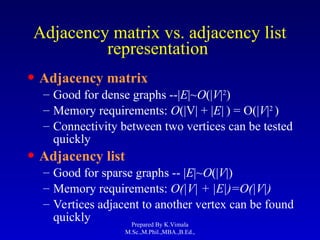
Adjacency matrix vs.adjacency list
representation
• Adjacency matrix
– Good for dense graphs --|E|~O(|V|2
)
– Memory requirements: O(|V| + |E|) = O(|V|2
)
– Connectivity between two vertices can be tested
quickly
• Adjacency list
– Good for sparse graphs -- |E|~O(|V|)
– Memory requirements: O(|V| + |E|)=O(|V|)
– Vertices adjacent to another vertex can be found
quickly Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
16.
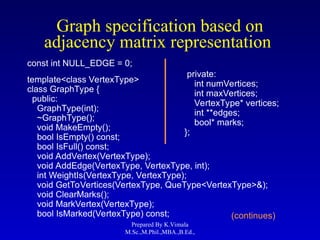
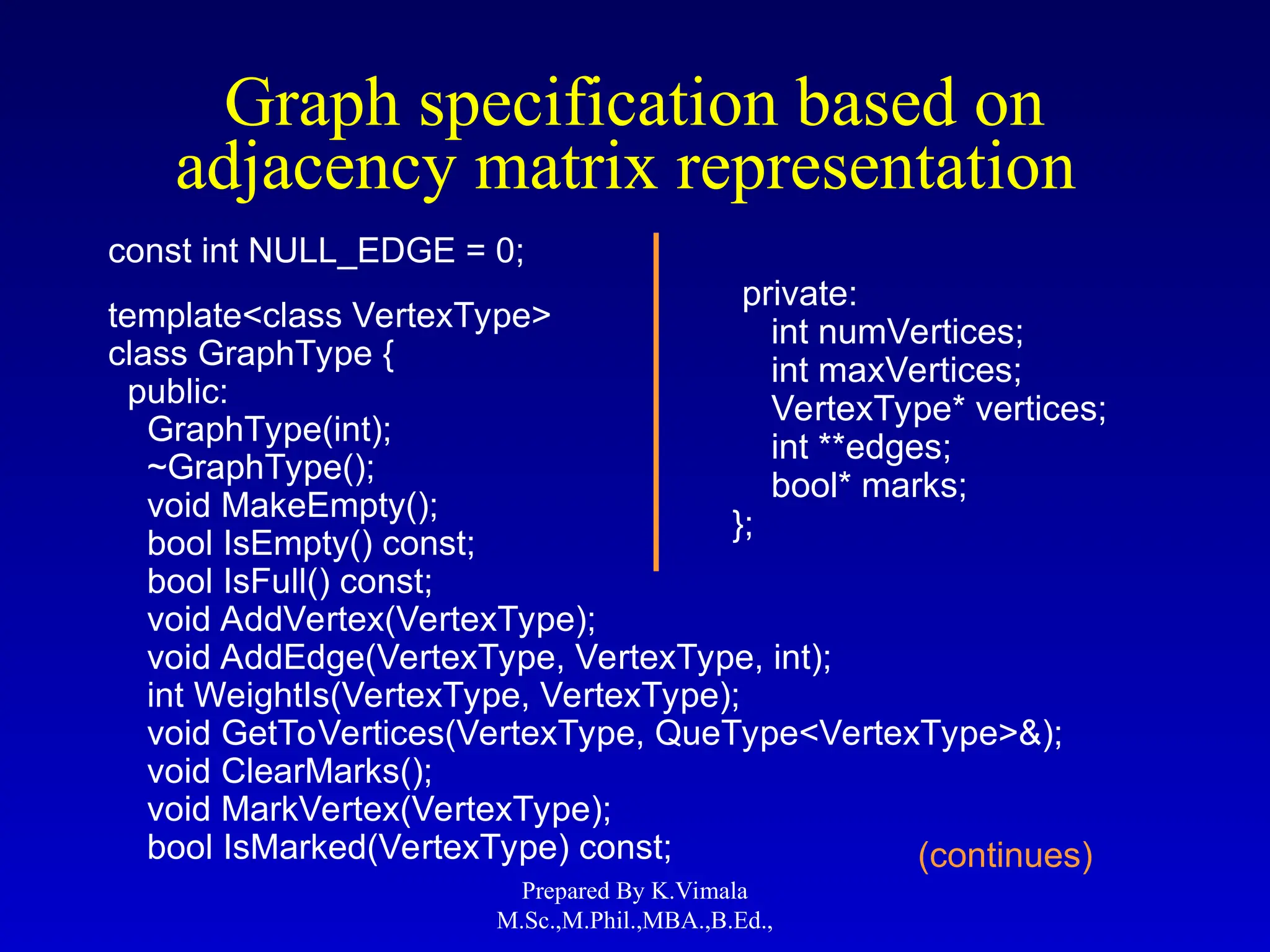
Graph specification basedon
adjacency matrix representation
const int NULL_EDGE = 0;
template<class VertexType>
class GraphType {
public:
GraphType(int);
~GraphType();
void MakeEmpty();
bool IsEmpty() const;
bool IsFull() const;
void AddVertex(VertexType);
void AddEdge(VertexType, VertexType, int);
int WeightIs(VertexType, VertexType);
void GetToVertices(VertexType, QueType<VertexType>&);
void ClearMarks();
void MarkVertex(VertexType);
bool IsMarked(VertexType) const;
private:
int numVertices;
int maxVertices;
VertexType* vertices;
int **edges;
bool* marks;
};
(continues)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
17.
template<class VertexType>
GraphType<VertexType>::GraphType(int maxV)
{
numVertices= 0;
maxVertices = maxV;
vertices = new VertexType[maxV];
edges = new int[maxV];
for(int i = 0; i < maxV; i++)
edges[i] = new int[maxV];
marks = new bool[maxV];
}
template<class VertexType>
GraphType<VertexType>::~GraphType()
{
delete [] vertices;
for(int i = 0; i < maxVertices; i++)
delete [] edges[i];
delete [] edges;
delete [] marks;
}
(continues)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
18.
void GraphType<VertexType>::AddVertex(VertexType vertex)
{
vertices[numVertices]= vertex;
for(int index = 0; index < numVertices; index++) {
edges[numVertices][index] = NULL_EDGE;
edges[index][numVertices] = NULL_EDGE;
}
numVertices++;
}
template<class VertexType>
void GraphType<VertexType>::AddEdge(VertexType fromVertex,
VertexType toVertex, int weight)
{
int row;
int column;
row = IndexIs(vertices, fromVertex);
col = IndexIs(vertices, toVertex);
edges[row][col] = weight;
}
(continues)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
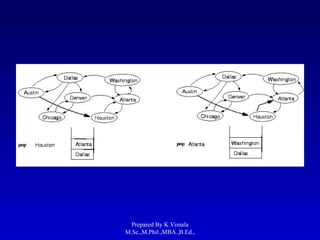
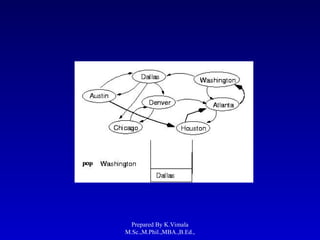
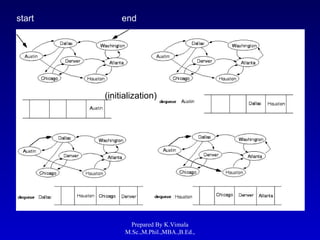
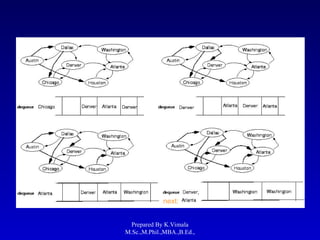
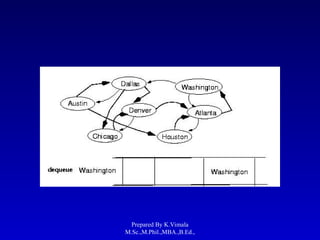
Graph searching
• Problem:find a path between two nodes of
the graph (e.g., Austin and Washington)
• Methods: Depth-First-Search (DFS) or
Breadth-First-Search (BFS)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
21.
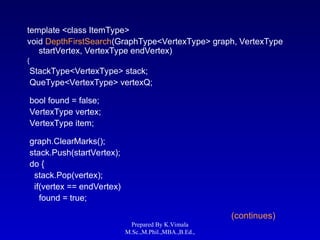
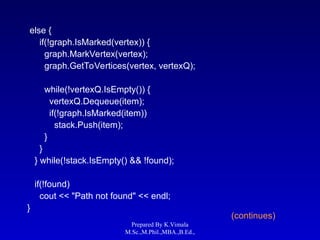
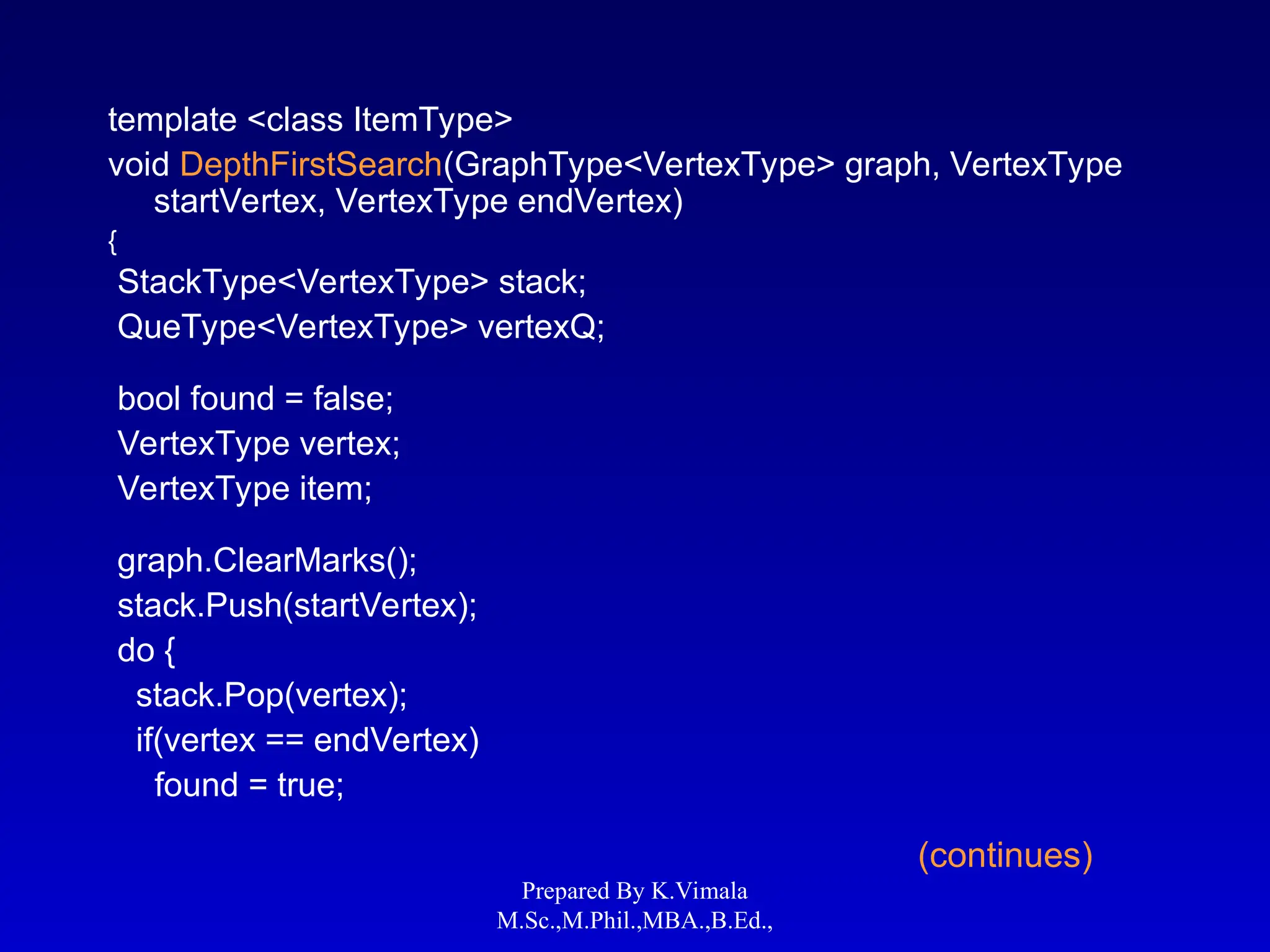
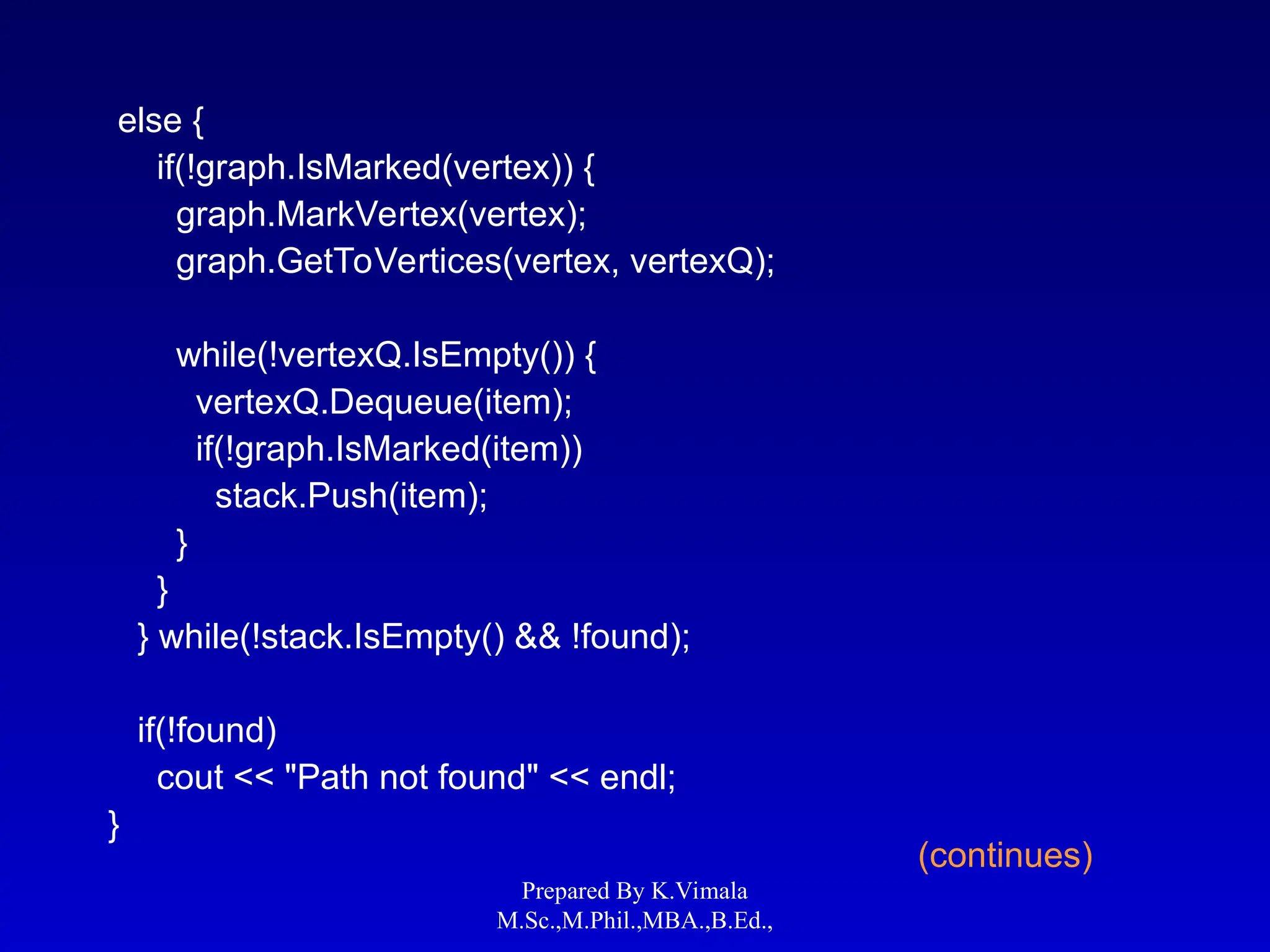
Depth-First-Search (DFS)
• Whatis the idea behind DFS?
– Travel as far as you can down a path
– Back up as little as possible when you reach a
"dead end" (i.e., next vertex has been "marked"
or there is no next vertex)
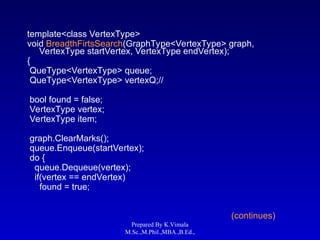
• DFS can be implemented efficiently using a
stack
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
22.
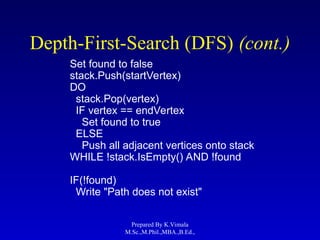
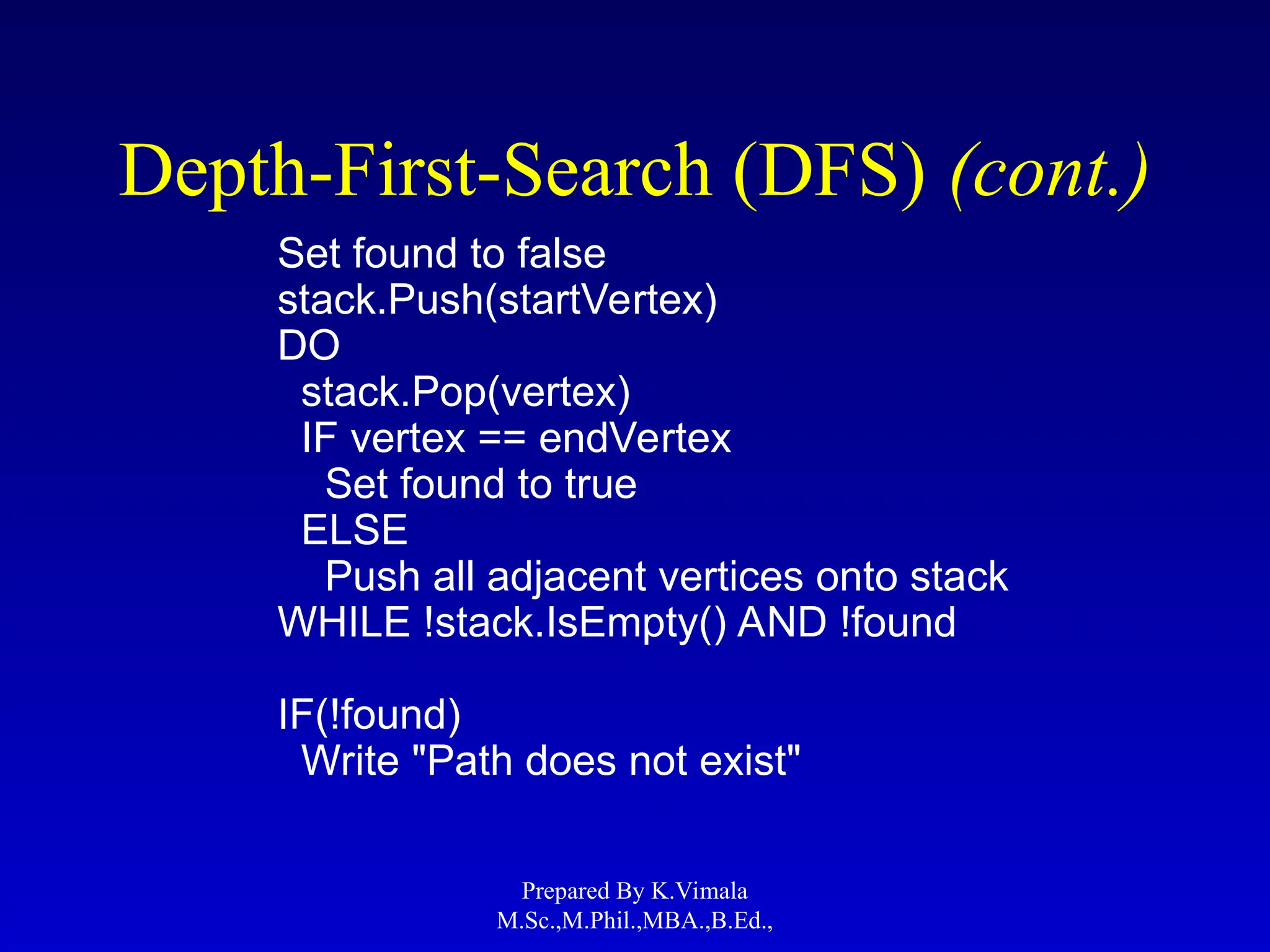
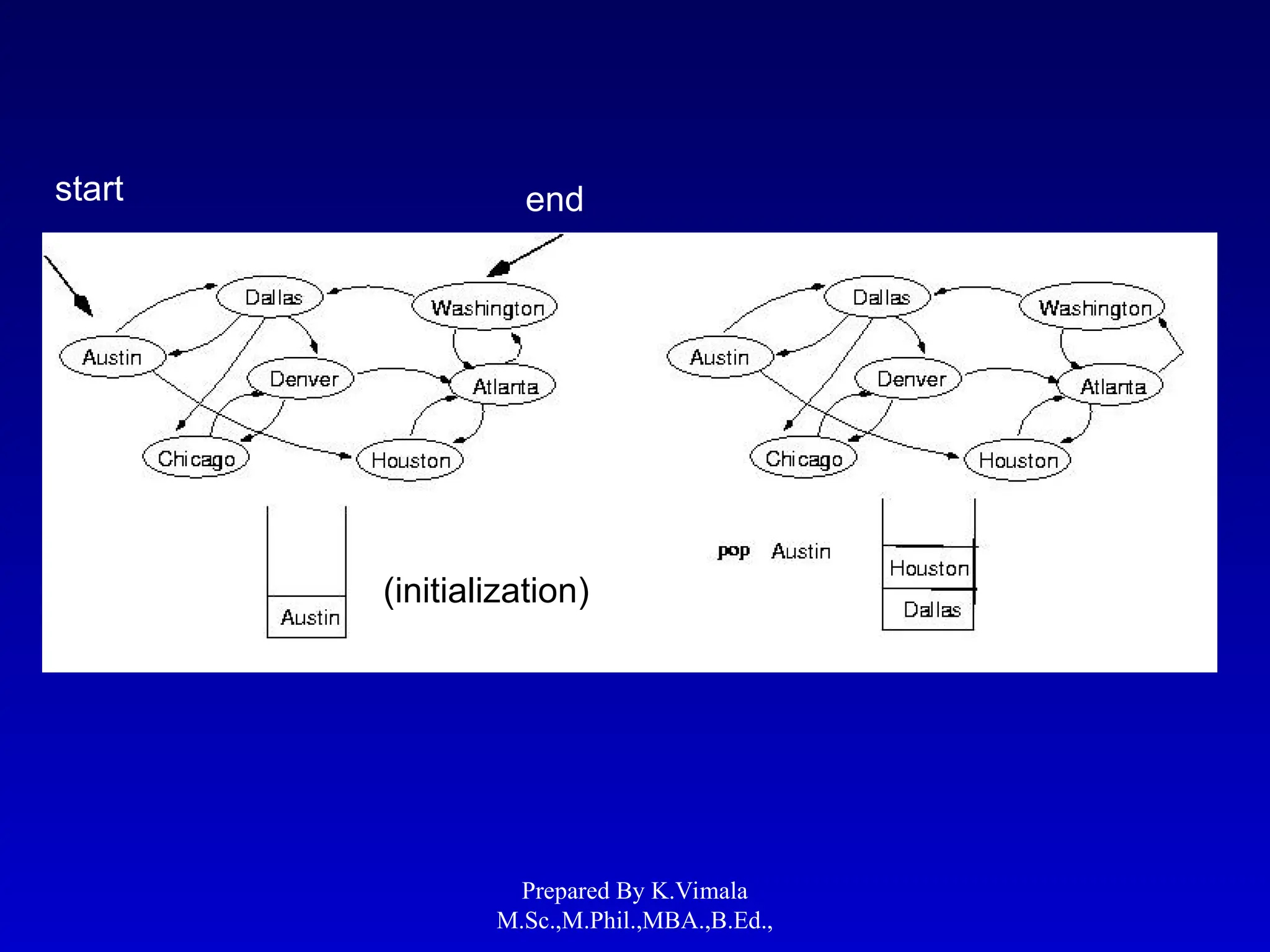
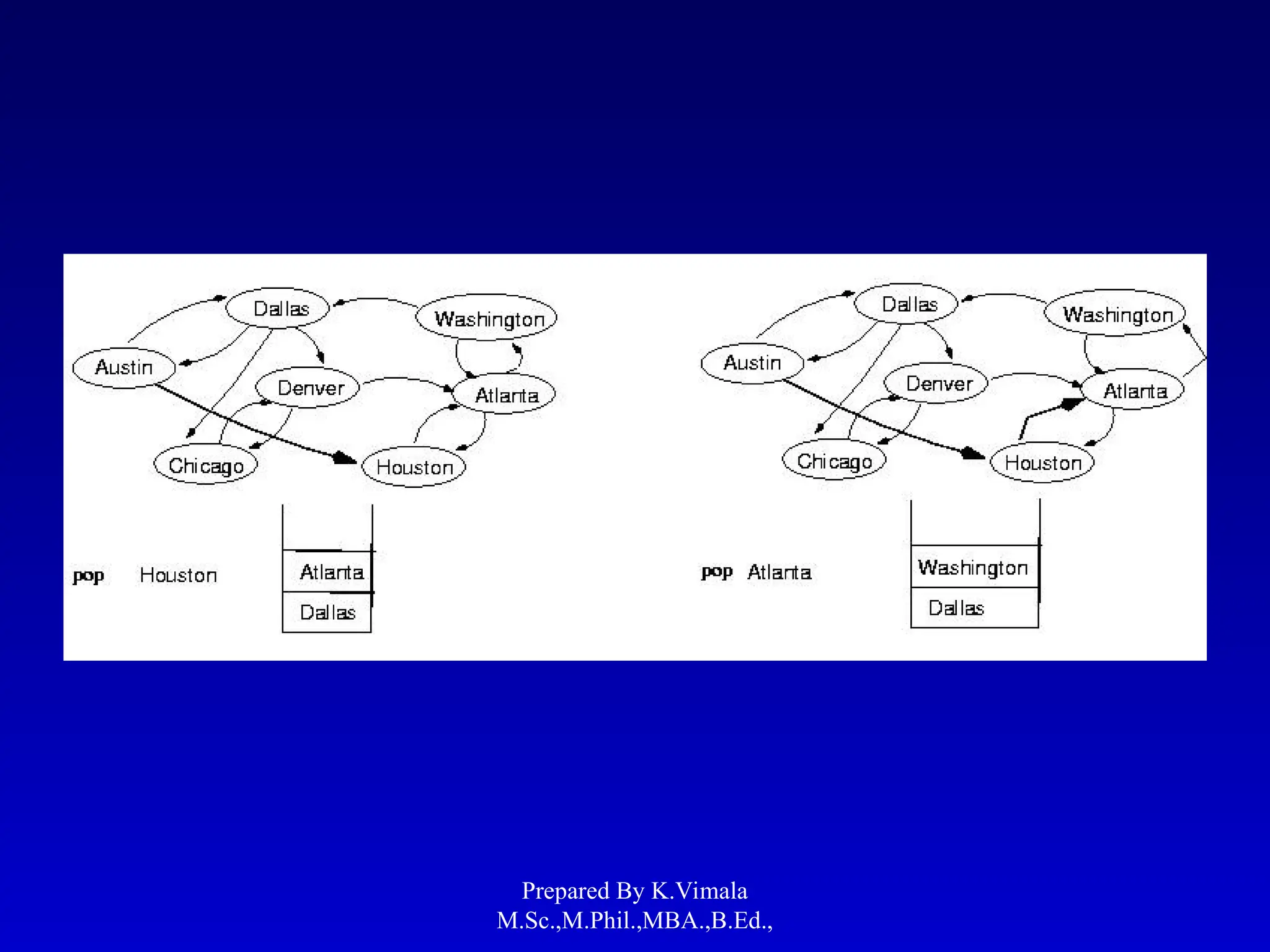
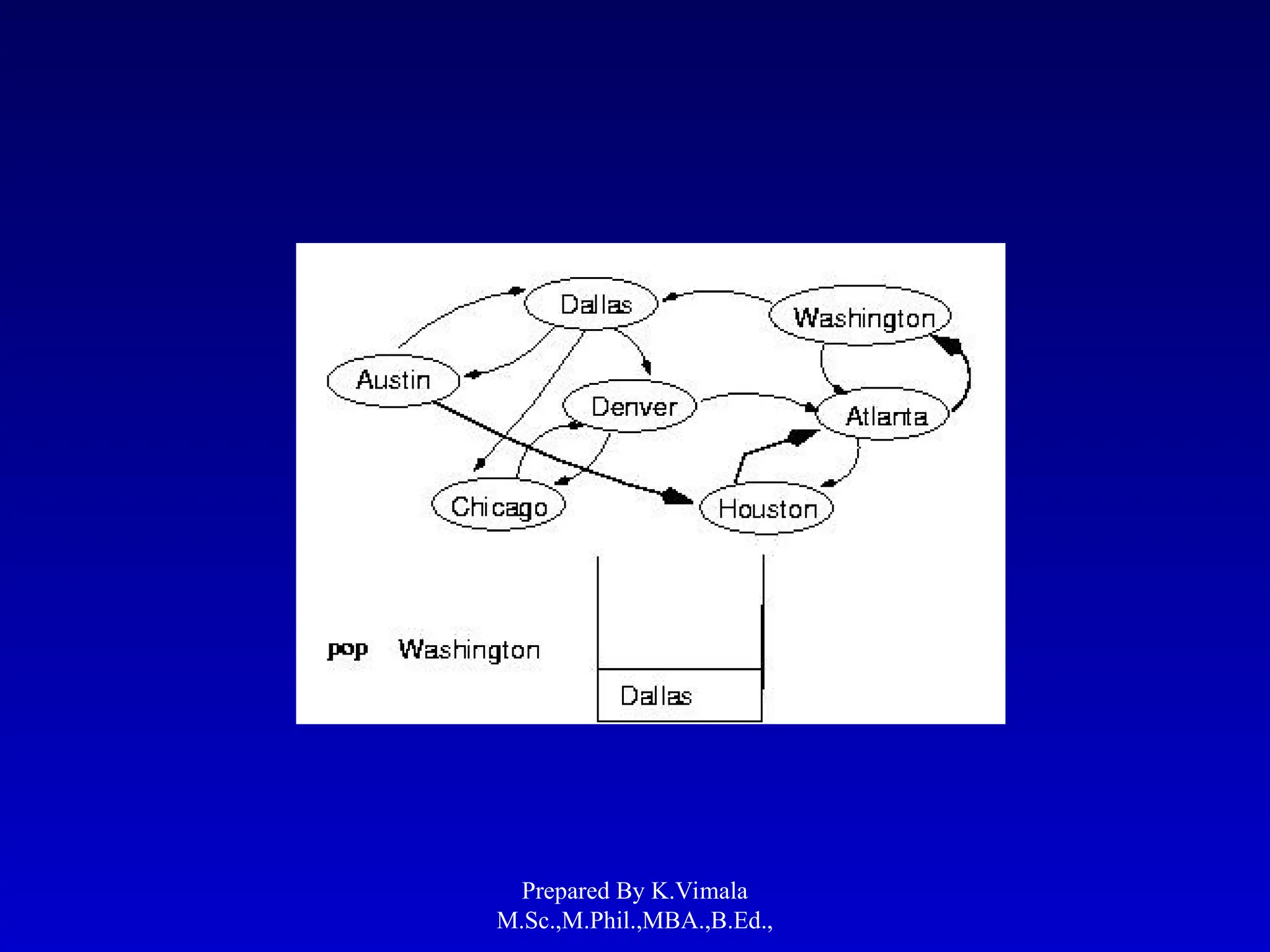
Set found tofalse
stack.Push(startVertex)
DO
stack.Pop(vertex)
IF vertex == endVertex
Set found to true
ELSE
Push all adjacent vertices onto stack
WHILE !stack.IsEmpty() AND !found
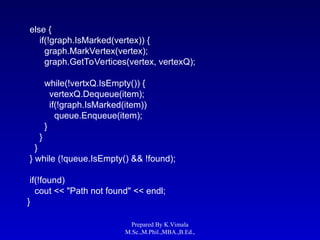
IF(!found)
Write "Path does not exist"
Depth-First-Search (DFS) (cont.)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
Breadth-First-Searching (BFS)
• Whatis the idea behind BFS?
– Look at all possible paths at the same depth
before you go at a deeper level
– Back up as far as possible when you reach a
"dead end" (i.e., next vertex has been "marked"
or there is no next vertex)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
30.
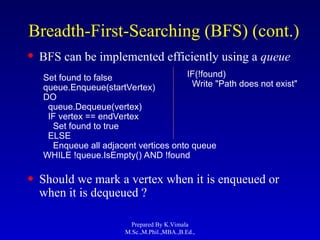
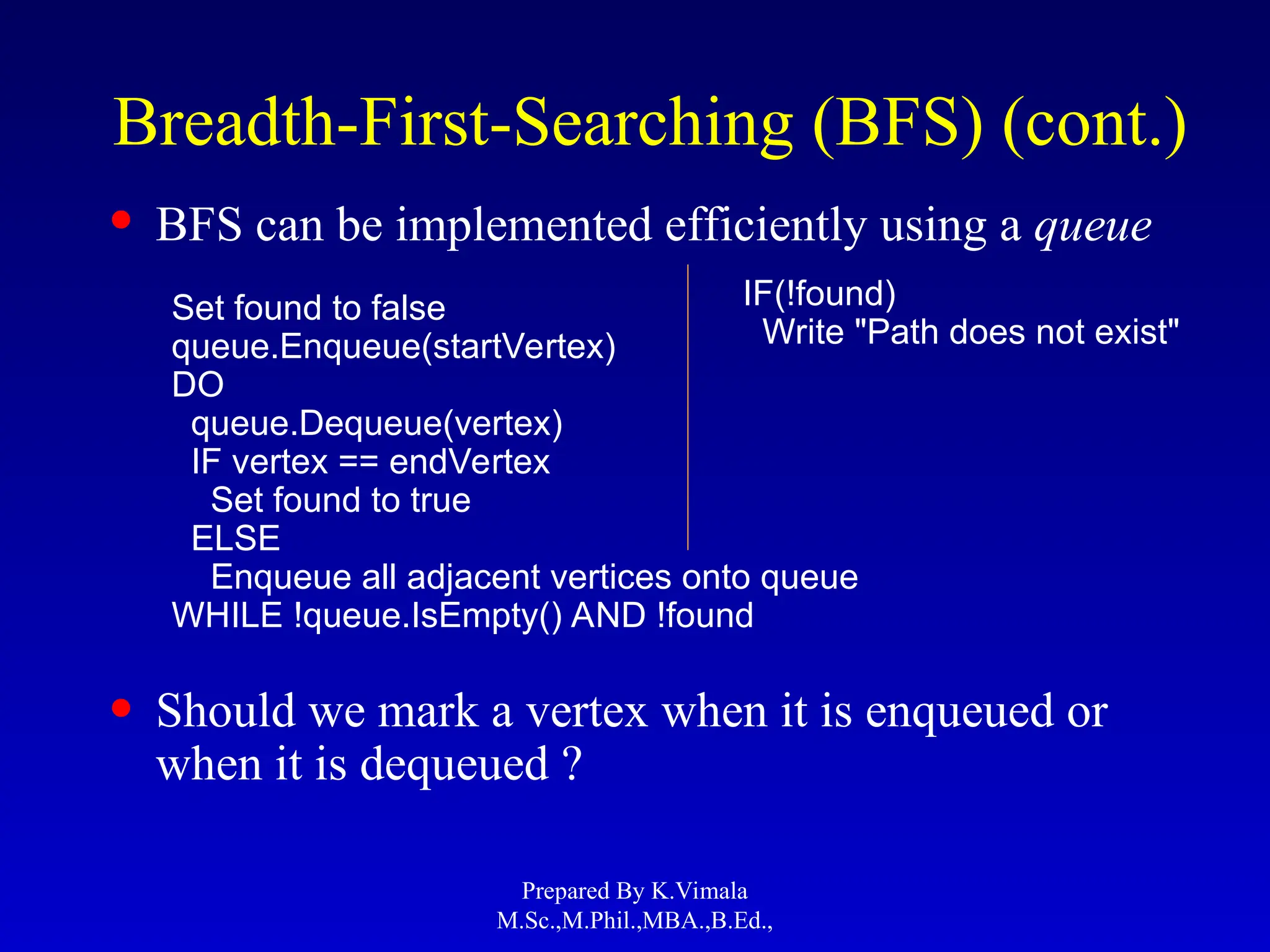
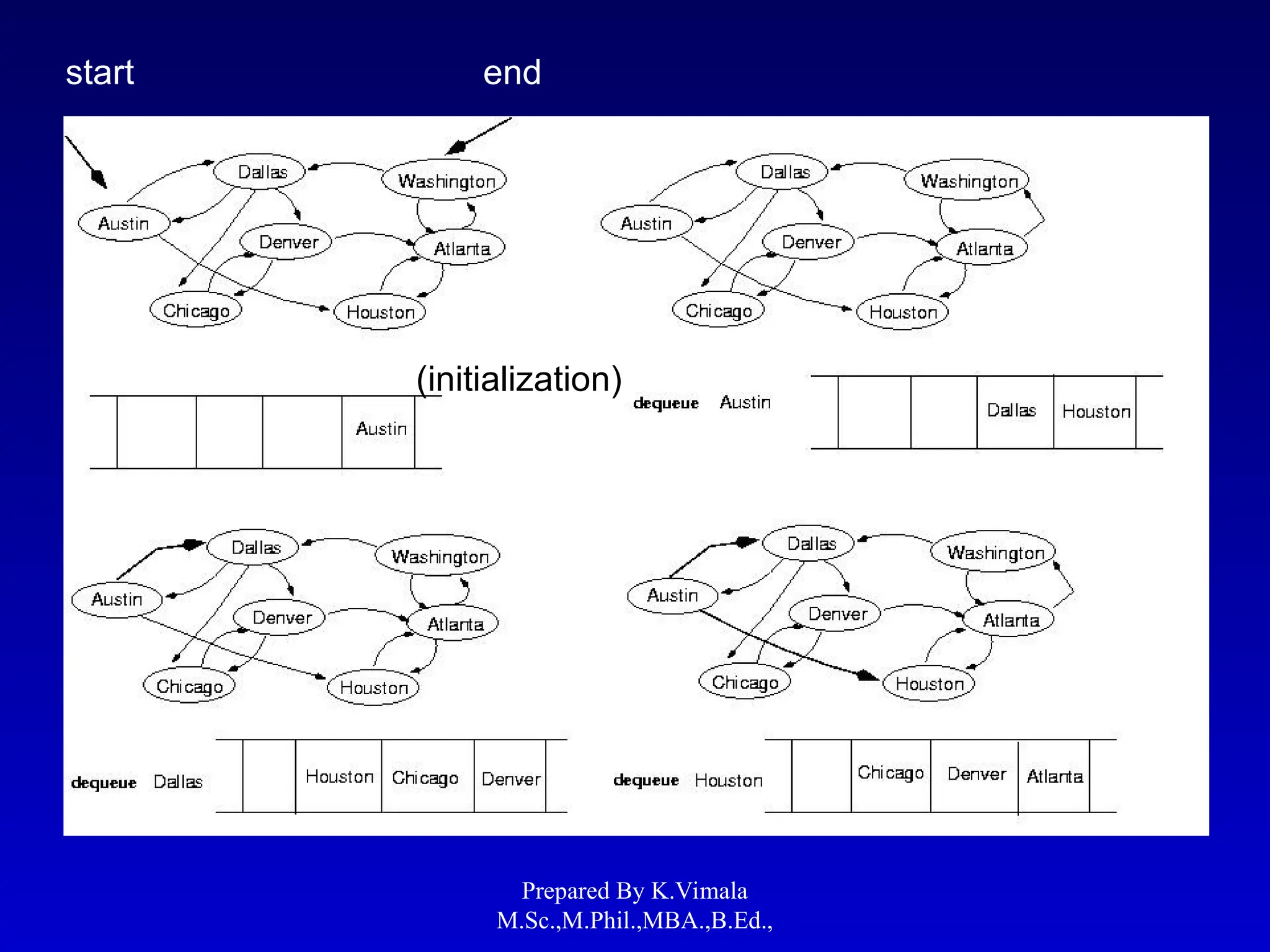
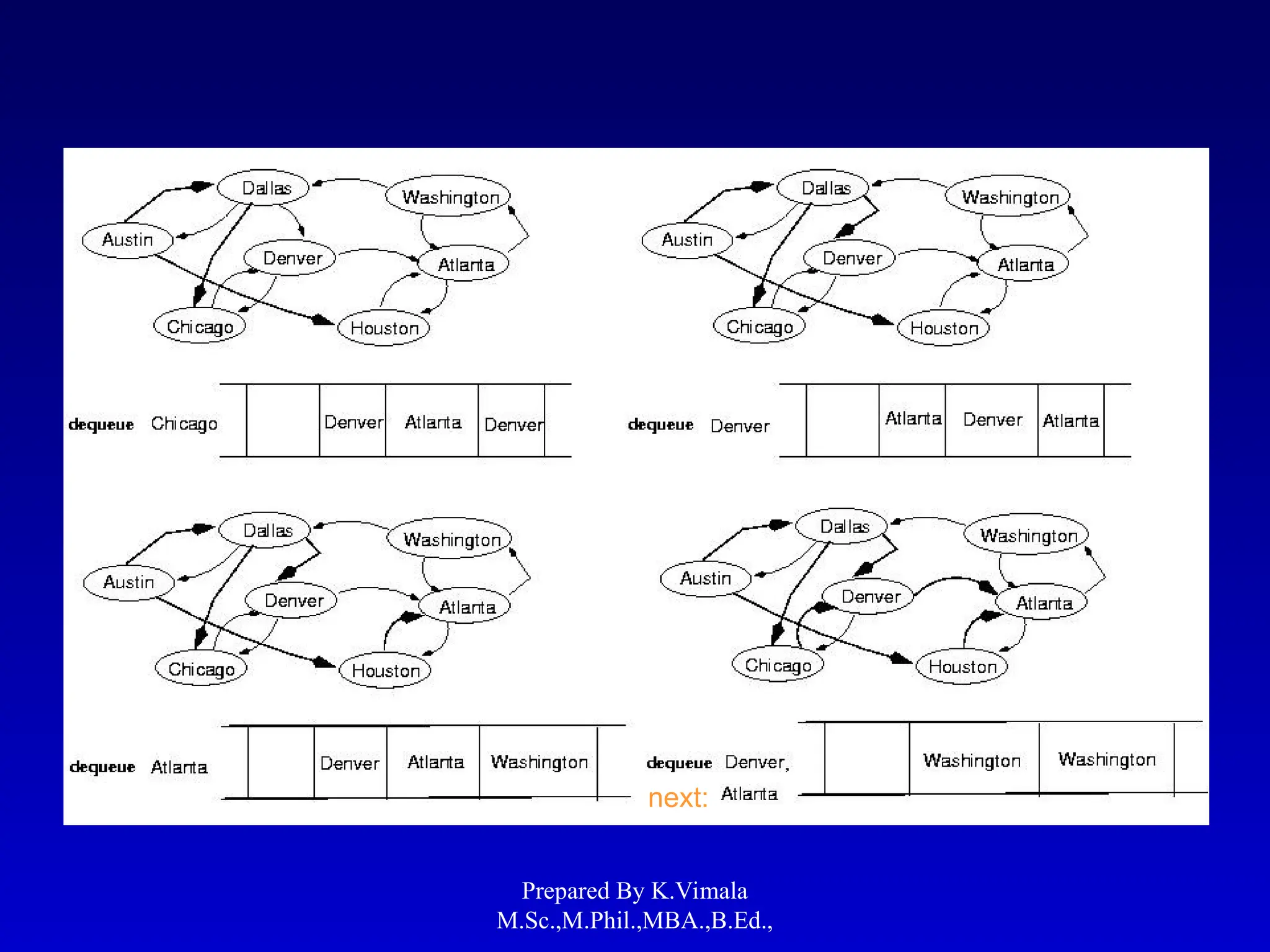
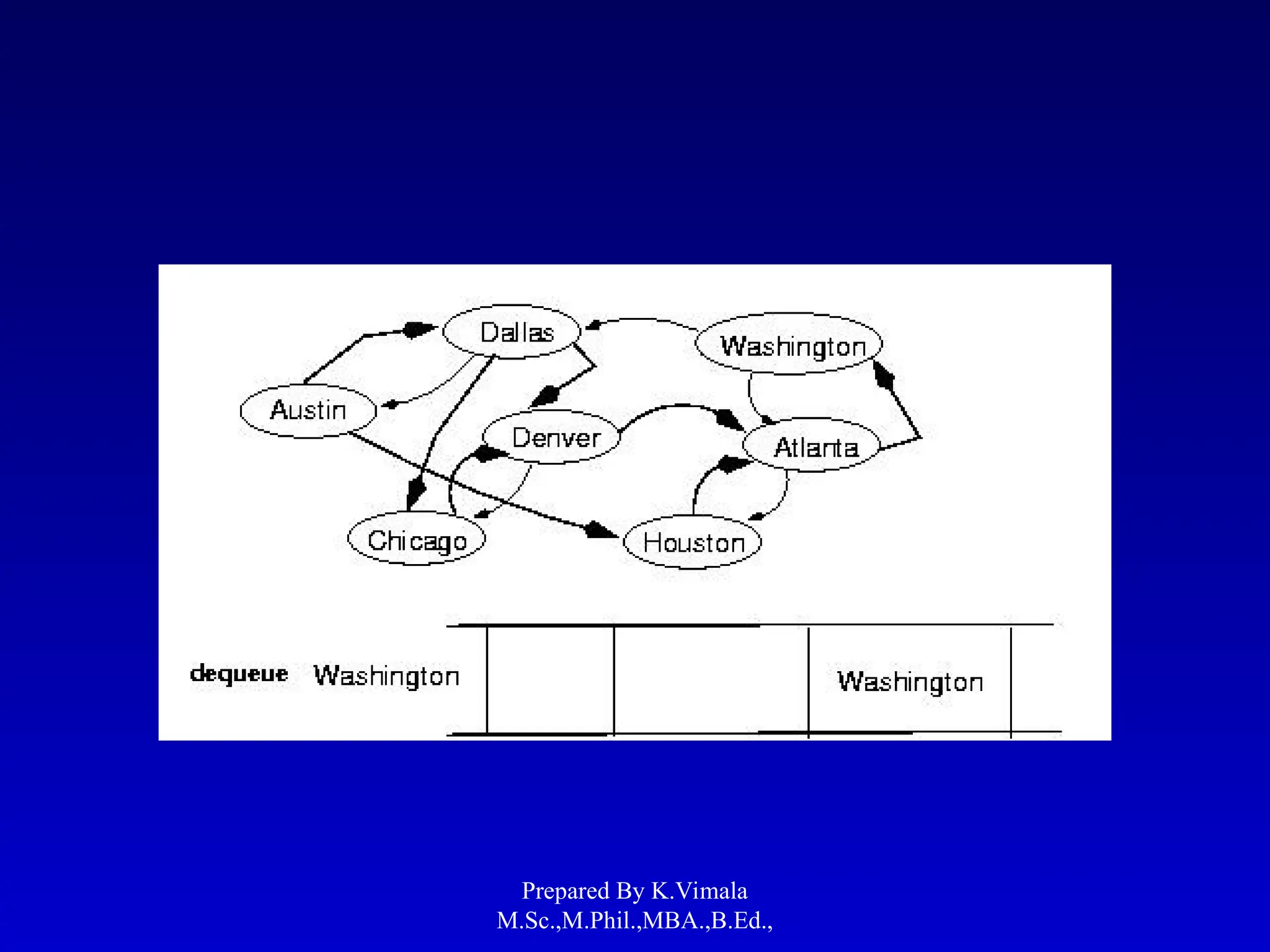
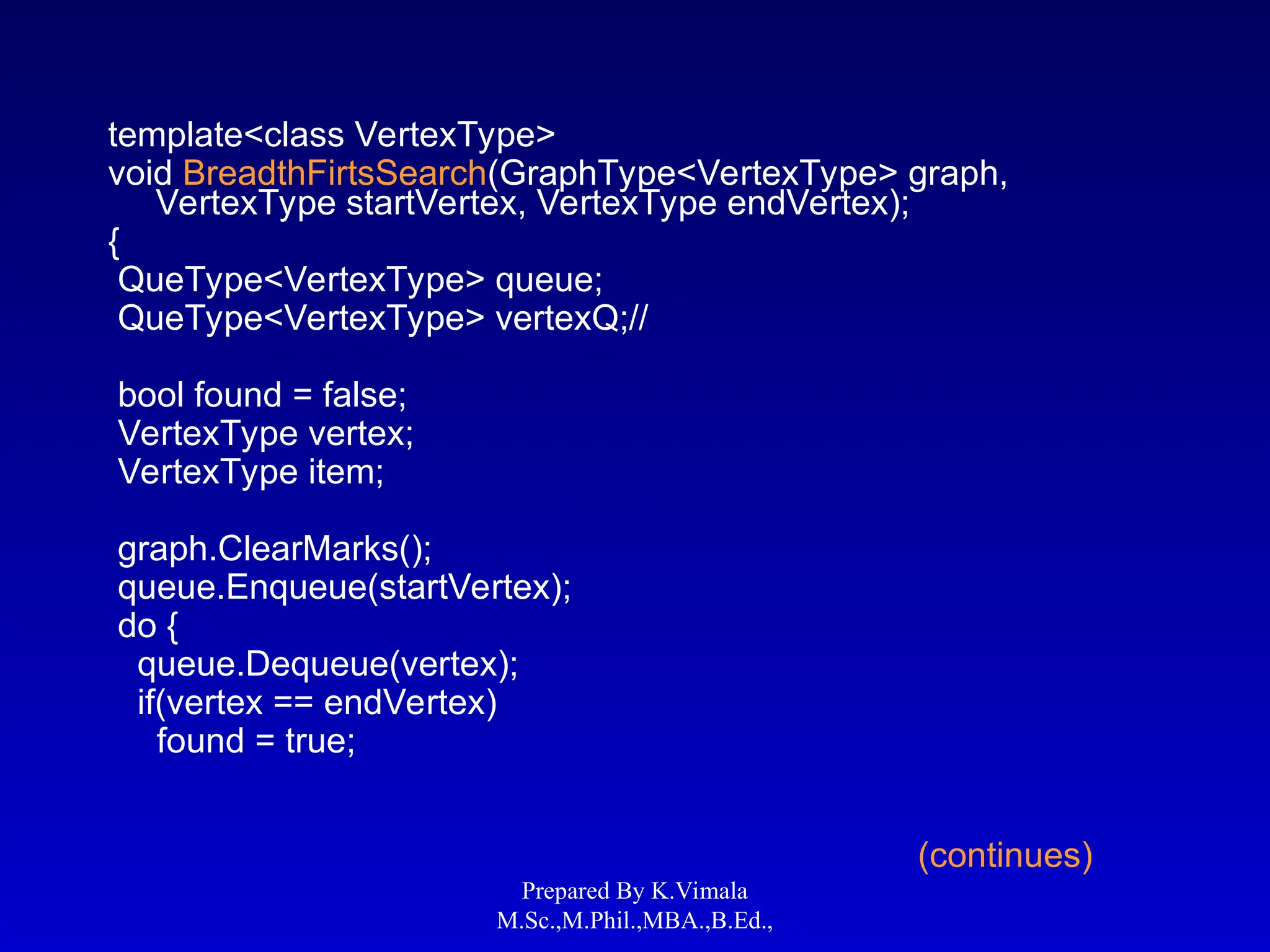
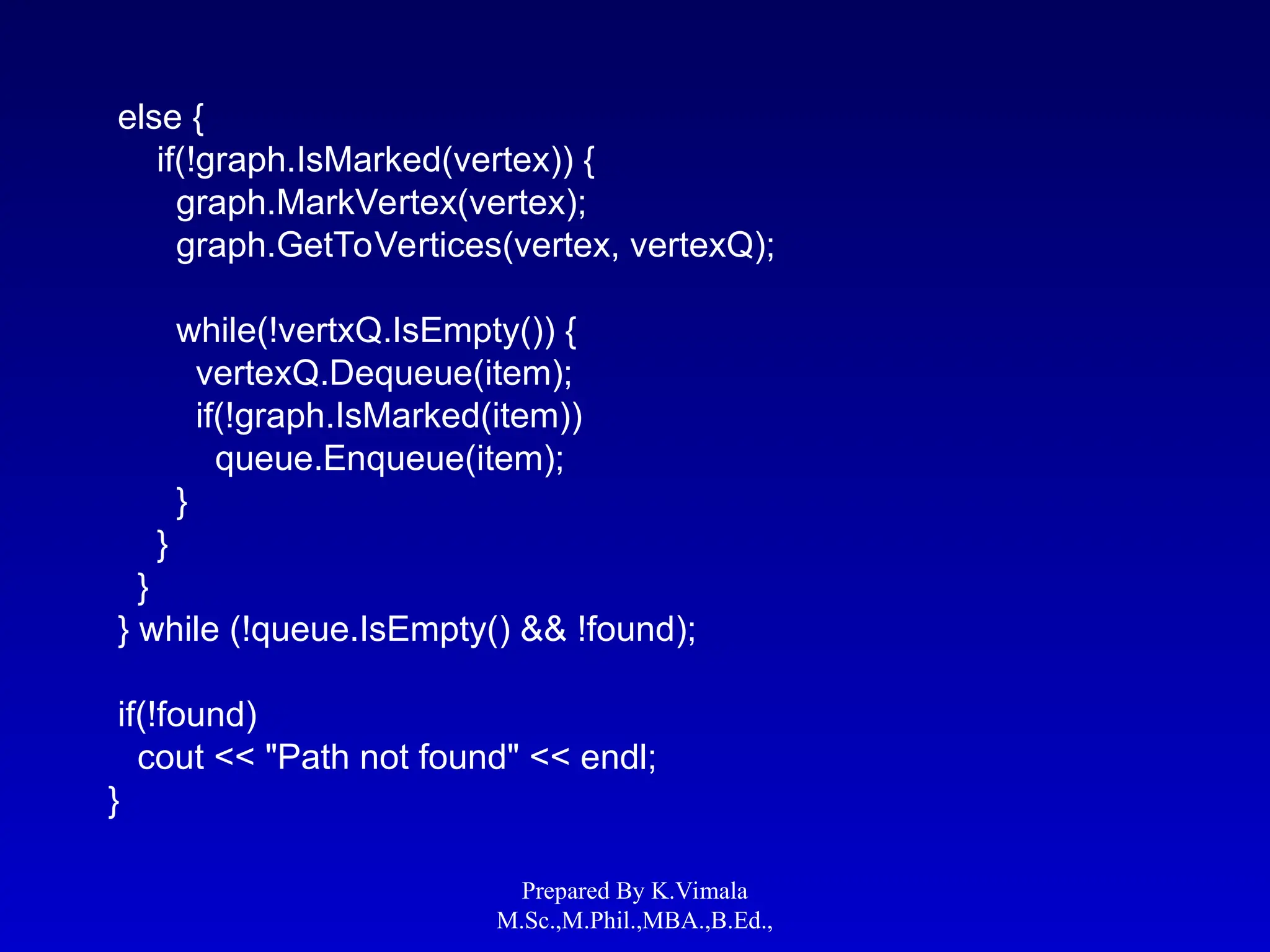
• BFS canbe implemented efficiently using a queue
Set found to false
queue.Enqueue(startVertex)
DO
queue.Dequeue(vertex)
IF vertex == endVertex
Set found to true
ELSE
Enqueue all adjacent vertices onto queue
WHILE !queue.IsEmpty() AND !found
• Should we mark a vertex when it is enqueued or
when it is dequeued ?
Breadth-First-Searching (BFS) (cont.)
IF(!found)
Write "Path does not exist"
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
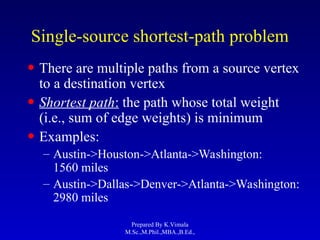
Single-source shortest-path problem
•There are multiple paths from a source vertex
to a destination vertex
• Shortest path: the path whose total weight
(i.e., sum of edge weights) is minimum
• Examples:
– Austin->Houston->Atlanta->Washington:
1560 miles
– Austin->Dallas->Denver->Atlanta->Washington:
2980 miles
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
37.
• Common algorithms:Dijkstra's algorithm,
Bellman-Ford algorithm
• BFS can be used to solve the shortest graph
problem when the graph is weightless
weightless or all
the weights are the same
(mark vertices before Enqueue)
Single-source shortest-path problem
(cont.)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,
![template<class VertexType>
GraphType<VertexType>::GraphType(int maxV)
{
numVertices = 0;
maxVertices = maxV;
vertices = new VertexType[maxV];
edges = new int[maxV];
for(int i = 0; i < maxV; i++)
edges[i] = new int[maxV];
marks = new bool[maxV];
}
template<class VertexType>
GraphType<VertexType>::~GraphType()
{
delete [] vertices;
for(int i = 0; i < maxVertices; i++)
delete [] edges[i];
delete [] edges;
delete [] marks;
}
(continues)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,](https://image.slidesharecdn.com/graphs2-250616113544-6ddbff59/85/Graphs-concept-in-data-structures-and-algorithms-ppt-17-320.jpg)
![void GraphType<VertexType>::AddVertex(VertexType vertex)
{
vertices[numVertices] = vertex;
for(int index = 0; index < numVertices; index++) {
edges[numVertices][index] = NULL_EDGE;
edges[index][numVertices] = NULL_EDGE;
}
numVertices++;
}
template<class VertexType>
void GraphType<VertexType>::AddEdge(VertexType fromVertex,
VertexType toVertex, int weight)
{
int row;
int column;
row = IndexIs(vertices, fromVertex);
col = IndexIs(vertices, toVertex);
edges[row][col] = weight;
}
(continues)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,](https://image.slidesharecdn.com/graphs2-250616113544-6ddbff59/85/Graphs-concept-in-data-structures-and-algorithms-ppt-18-320.jpg)
![template<class VertexType>
int GraphType<VertexType>::WeightIs(VertexType fromVertex,
VertexType toVertex)
{
int row;
int column;
row = IndexIs(vertices, fromVertex);
col = IndexIs(vertices, toVertex);
return edges[row][col];
}
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,](https://image.slidesharecdn.com/graphs2-250616113544-6ddbff59/85/Graphs-concept-in-data-structures-and-algorithms-ppt-19-320.jpg)
![template<class VertexType>
void GraphType<VertexType>::GetToVertices(VertexType vertex,
QueTye<VertexType>& adjvertexQ)
{
int fromIndex;
int toIndex;
fromIndex = IndexIs(vertices, vertex);
for(toIndex = 0; toIndex < numVertices; toIndex++)
if(edges[fromIndex][toIndex] != NULL_EDGE)
adjvertexQ.Enqueue(vertices[toIndex]);
}
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,](https://image.slidesharecdn.com/graphs2-250616113544-6ddbff59/85/Graphs-concept-in-data-structures-and-algorithms-ppt-28-320.jpg)
![template<class VertexType>
GraphType<VertexType>::GraphType(int maxV)
{
numVertices = 0;
maxVertices = maxV;
vertices = new VertexType[maxV];
edges = new int[maxV];
for(int i = 0; i < maxV; i++)
edges[i] = new int[maxV];
marks = new bool[maxV];
}
template<class VertexType>
GraphType<VertexType>::~GraphType()
{
delete [] vertices;
for(int i = 0; i < maxVertices; i++)
delete [] edges[i];
delete [] edges;
delete [] marks;
}
(continues)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,](https://image.slidesharecdn.com/graphs2-250616113544-6ddbff59/75/Graphs-concept-in-data-structures-and-algorithms-ppt-17-2048.jpg)
![void GraphType<VertexType>::AddVertex(VertexType vertex)
{
vertices[numVertices] = vertex;
for(int index = 0; index < numVertices; index++) {
edges[numVertices][index] = NULL_EDGE;
edges[index][numVertices] = NULL_EDGE;
}
numVertices++;
}
template<class VertexType>
void GraphType<VertexType>::AddEdge(VertexType fromVertex,
VertexType toVertex, int weight)
{
int row;
int column;
row = IndexIs(vertices, fromVertex);
col = IndexIs(vertices, toVertex);
edges[row][col] = weight;
}
(continues)
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,](https://image.slidesharecdn.com/graphs2-250616113544-6ddbff59/75/Graphs-concept-in-data-structures-and-algorithms-ppt-18-2048.jpg)
![template<class VertexType>
int GraphType<VertexType>::WeightIs(VertexType fromVertex,
VertexType toVertex)
{
int row;
int column;
row = IndexIs(vertices, fromVertex);
col = IndexIs(vertices, toVertex);
return edges[row][col];
}
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,](https://image.slidesharecdn.com/graphs2-250616113544-6ddbff59/75/Graphs-concept-in-data-structures-and-algorithms-ppt-19-2048.jpg)
![template<class VertexType>
void GraphType<VertexType>::GetToVertices(VertexType vertex,
QueTye<VertexType>& adjvertexQ)
{
int fromIndex;
int toIndex;
fromIndex = IndexIs(vertices, vertex);
for(toIndex = 0; toIndex < numVertices; toIndex++)
if(edges[fromIndex][toIndex] != NULL_EDGE)
adjvertexQ.Enqueue(vertices[toIndex]);
}
Prepared By K.Vimala
M.Sc.,M.Phil.,MBA.,B.Ed.,](https://image.slidesharecdn.com/graphs2-250616113544-6ddbff59/75/Graphs-concept-in-data-structures-and-algorithms-ppt-28-2048.jpg)






![Data Structures - Lecture 10 [Graphs]](https://cdn.slidesharecdn.com/ss_thumbnails/datastructures-lecture10graphs-150305004608-conversion-gate01-thumbnail.jpg?width=600ounds&width=560&fit=bounds)








































![UiPath Automation Suite Installation (Hands-On) [2/3]](https://cdn.slidesharecdn.com/ss_thumbnails/automationsuitecommunitysession2-251015095633-a6d862f1-thumbnail.jpg?width=600ounds&width=560&fit=bounds)













