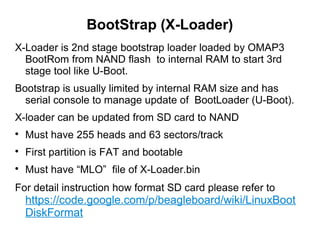
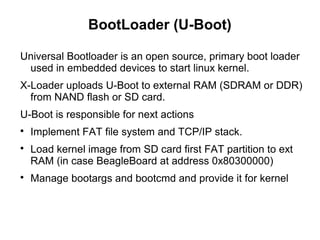
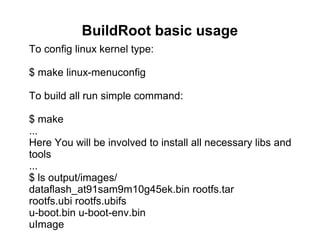
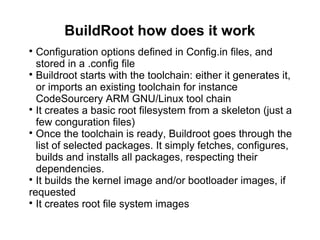
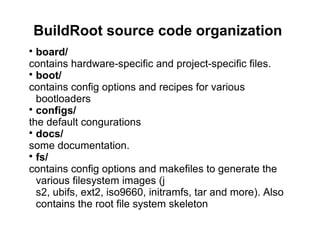
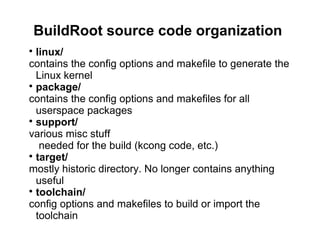
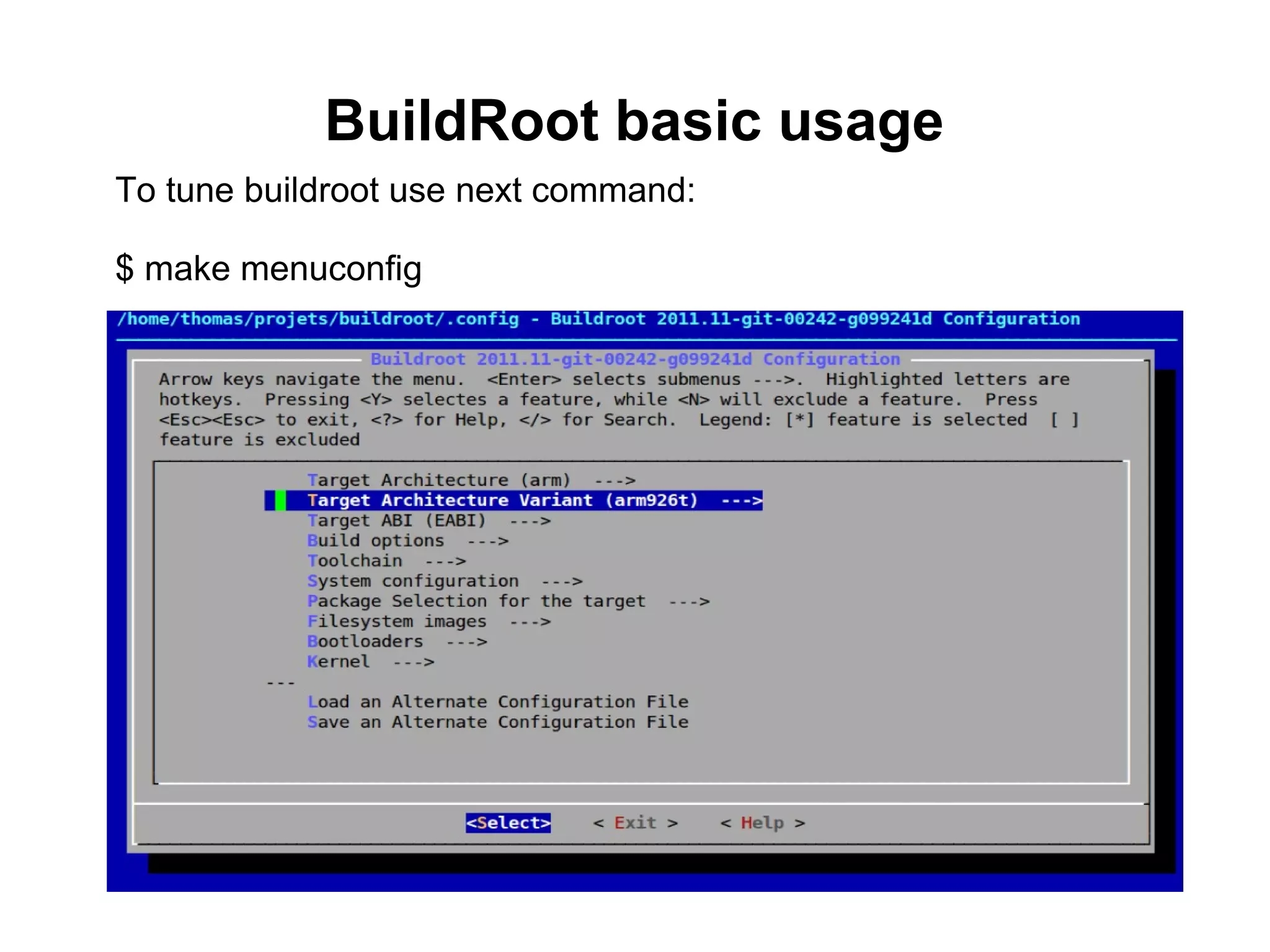
The document describes the Linux boot process on embedded systems. It has 5 stages: 1) BootRom loads BootStrap, 2) BootStrap loads U-Boot from storage to RAM, 3) U-Boot loads the kernel and provides arguments, 4) The kernel mounts the root file system, 5) The kernel starts the init process. It then provides details on BootStrap, U-Boot, configuring boot arguments and commands in U-Boot, and using BuildRoot to build a root file system.



























![[DEFCON 16] Bypassing pre-boot authentication passwords by instrumenting the...](https://cdn.slidesharecdn.com/ss_thumbnails/defcon16brossard-100918053407-phpapp02-thumbnail.jpg?width=600ounds&width=560&fit=bounds)























































![UiPath Automation Suite Installation (Hands-On) [2/3]](https://cdn.slidesharecdn.com/ss_thumbnails/automationsuitecommunitysession2-251015095633-a6d862f1-thumbnail.jpg?width=600ounds&width=560&fit=bounds)





