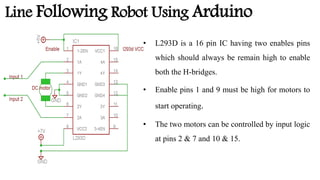
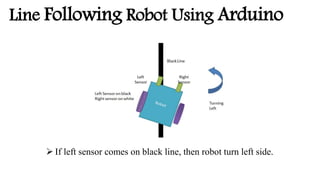
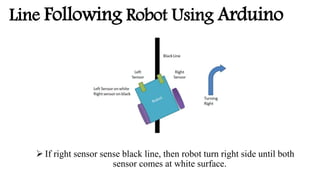
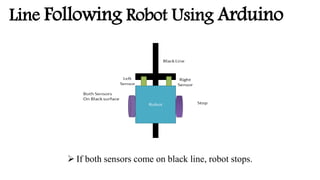
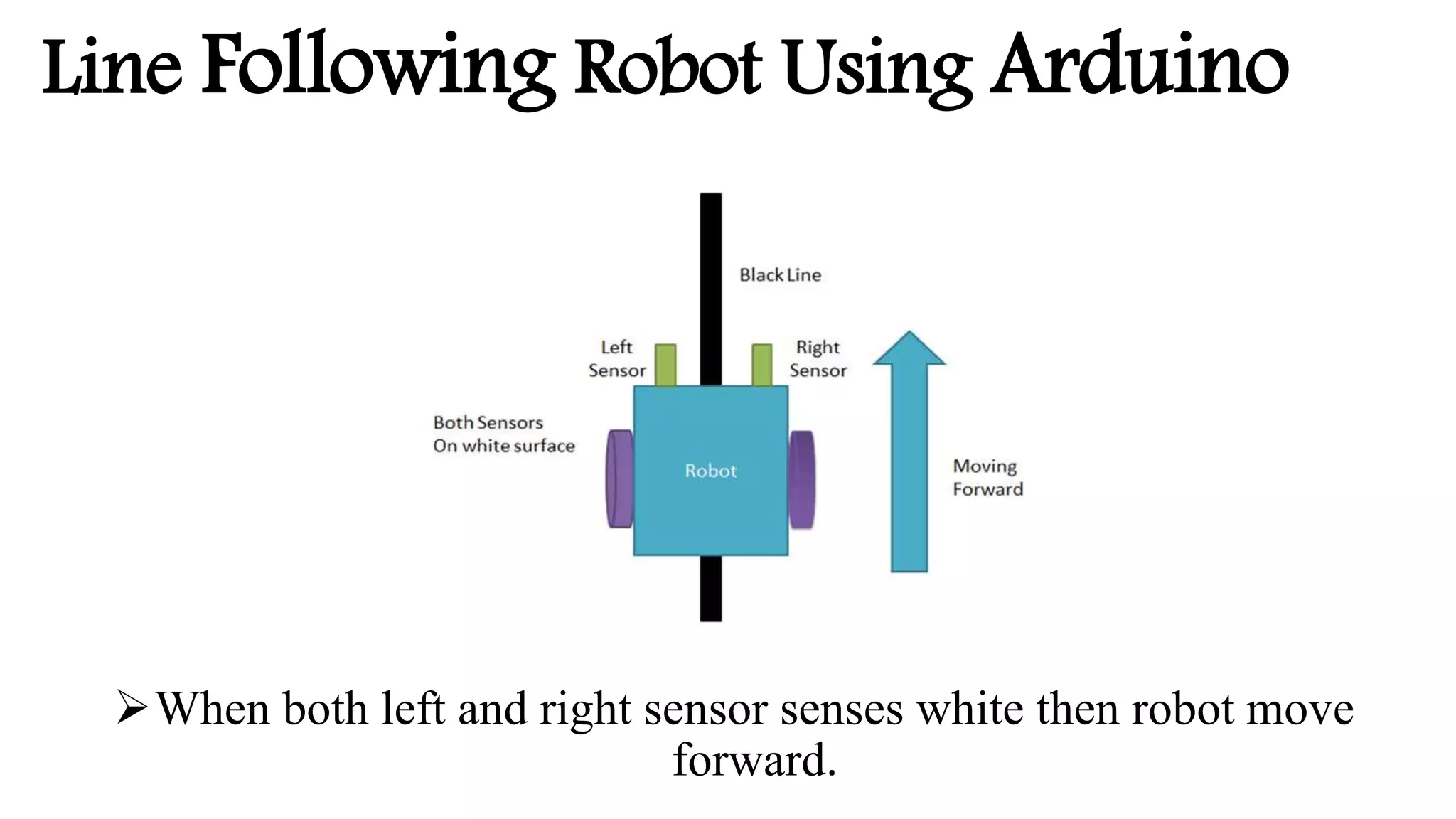
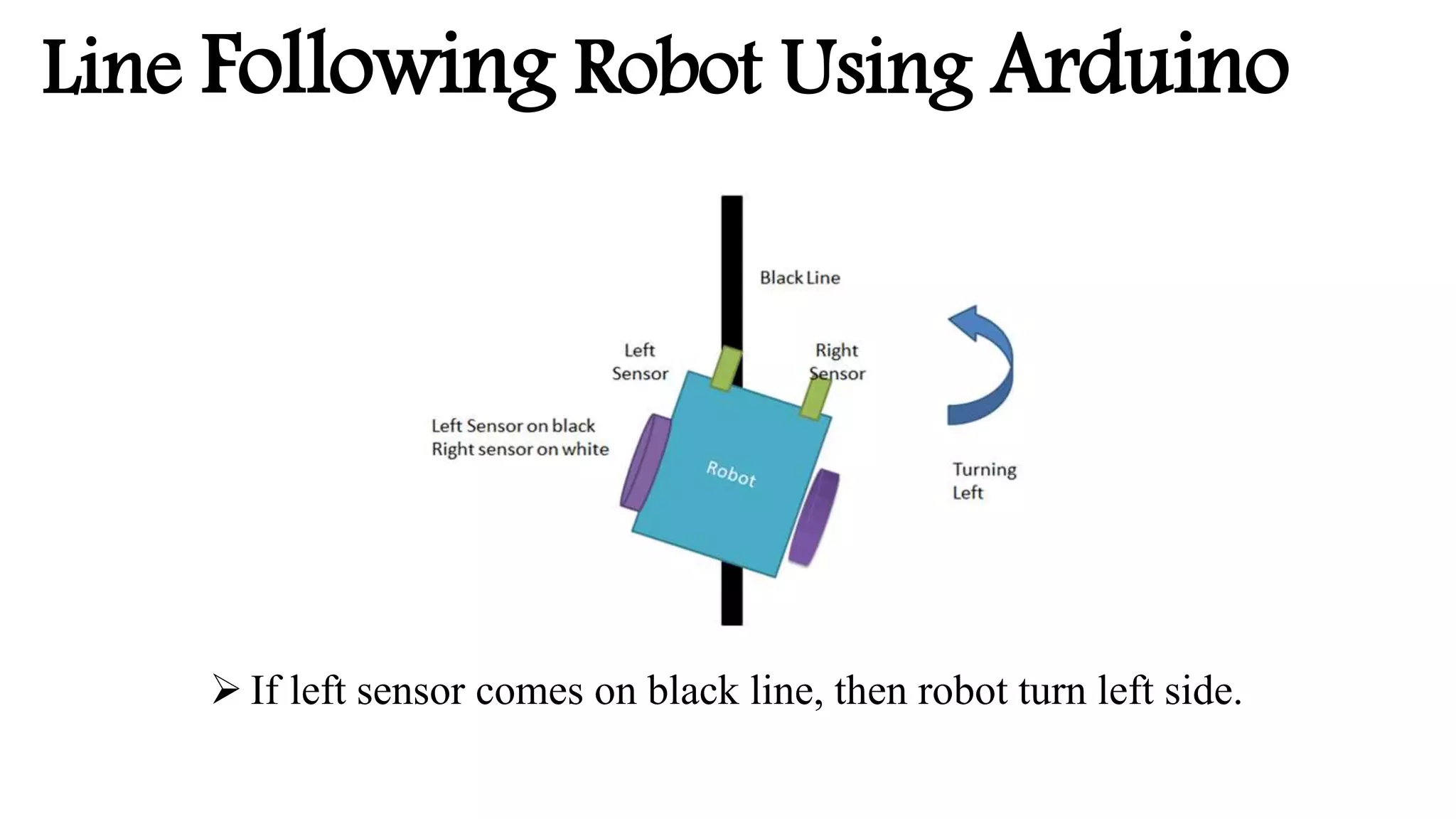
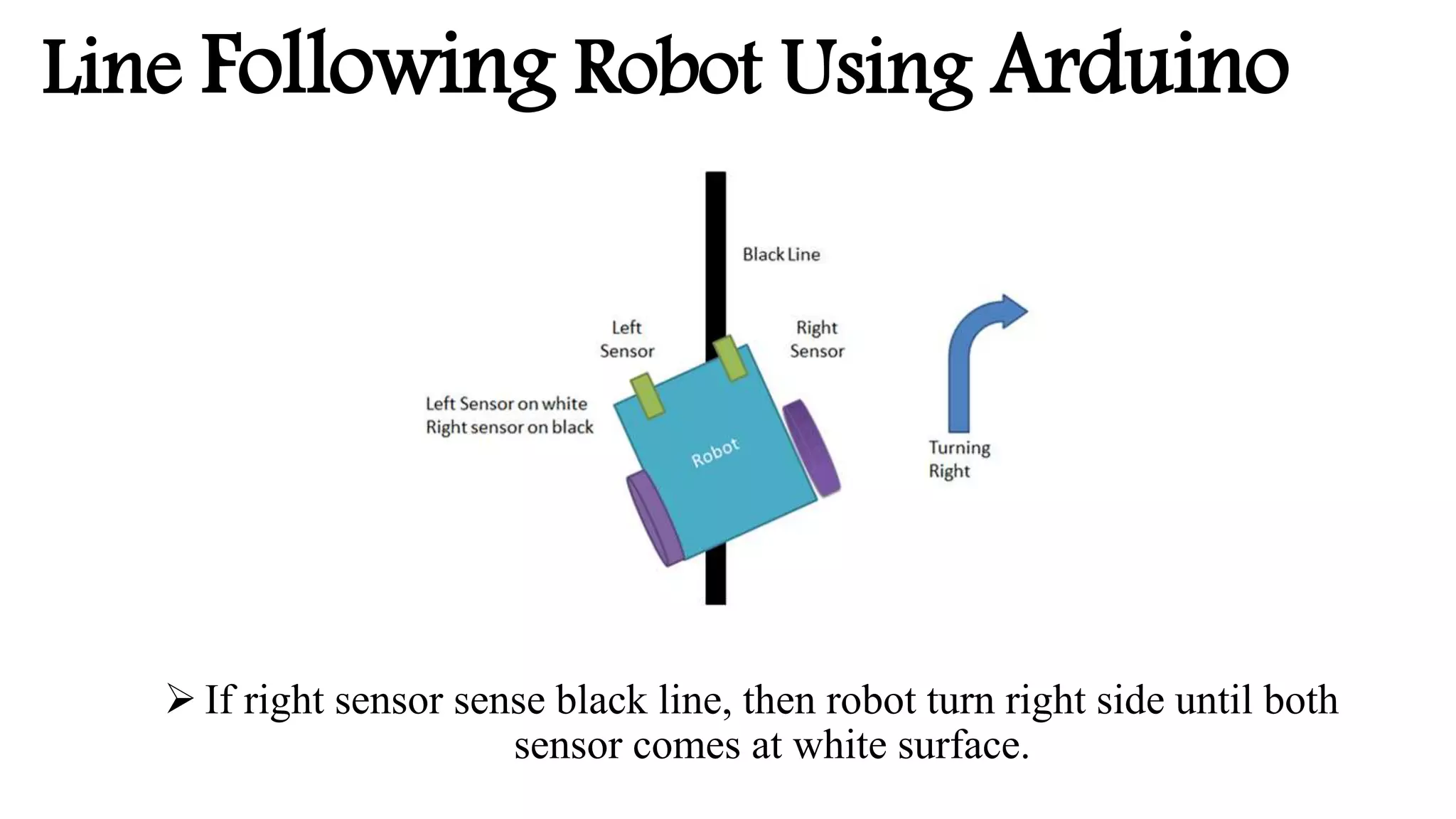
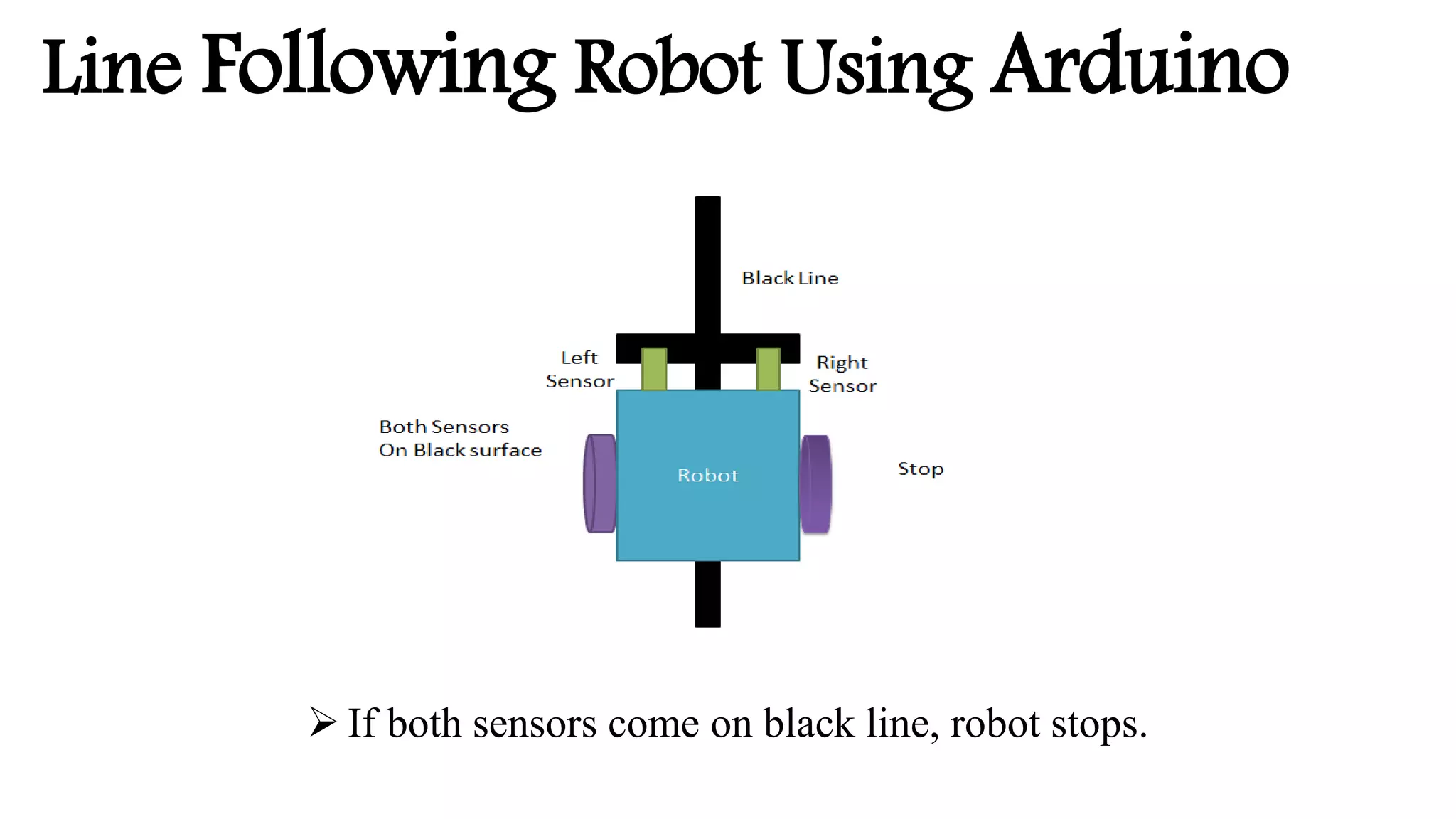
The line following robot uses two IR sensors to detect a black line on a white surface. It moves forward when both sensors detect white, turns left when the left sensor detects black, and turns right when the right sensor detects black. The robot stops when both sensors detect black. It is built using an Arduino UNO, two DC motors controlled by an L293D motor driver IC, two IR sensors, a robot chassis, and a black electrical tape line on a white surface.