Download as PDF, PPTX

![microservice
Architectural
style
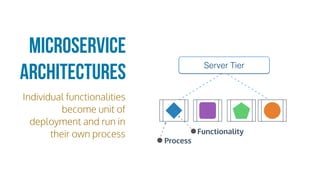
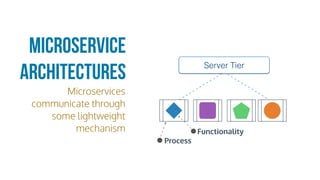
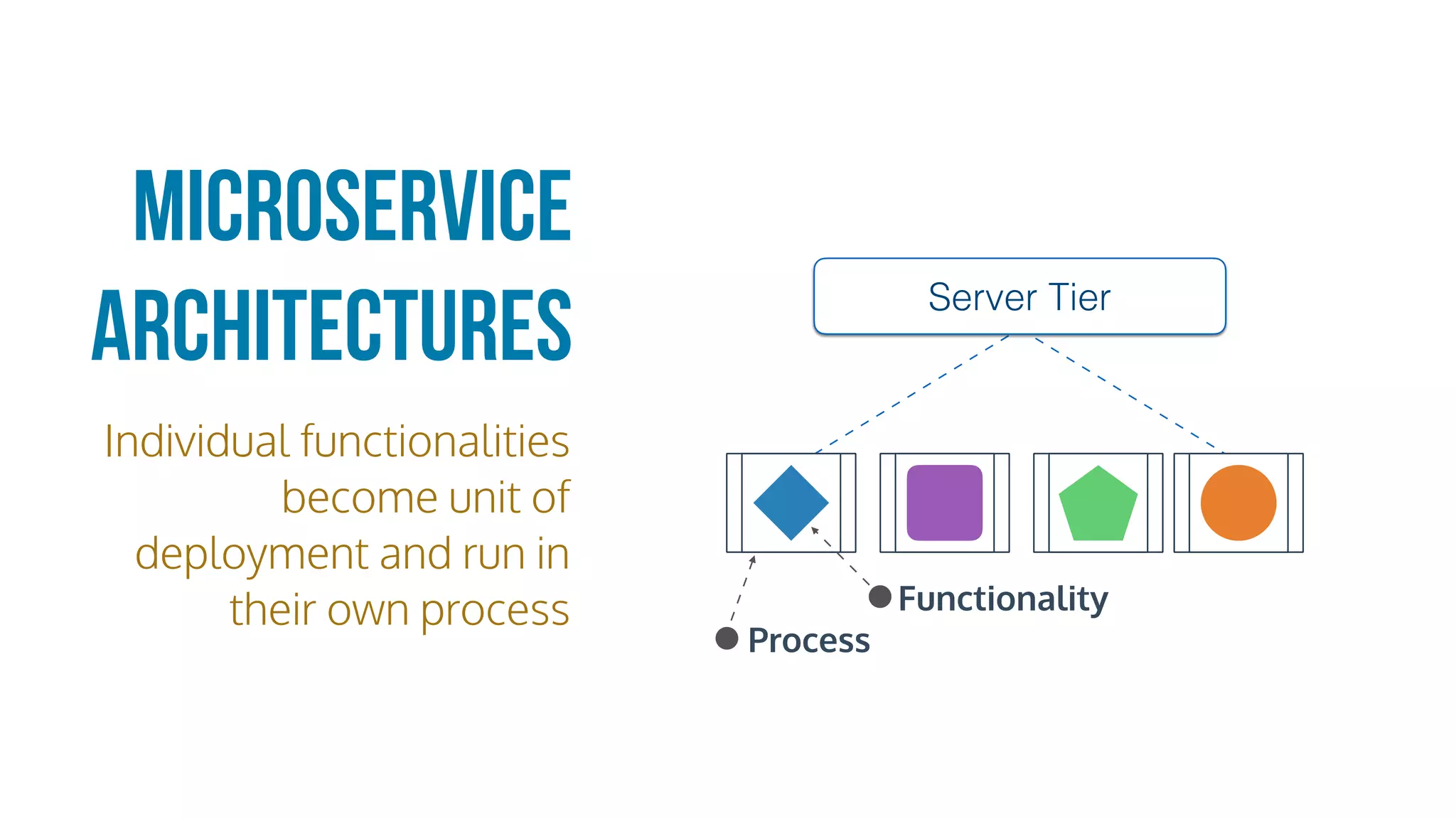
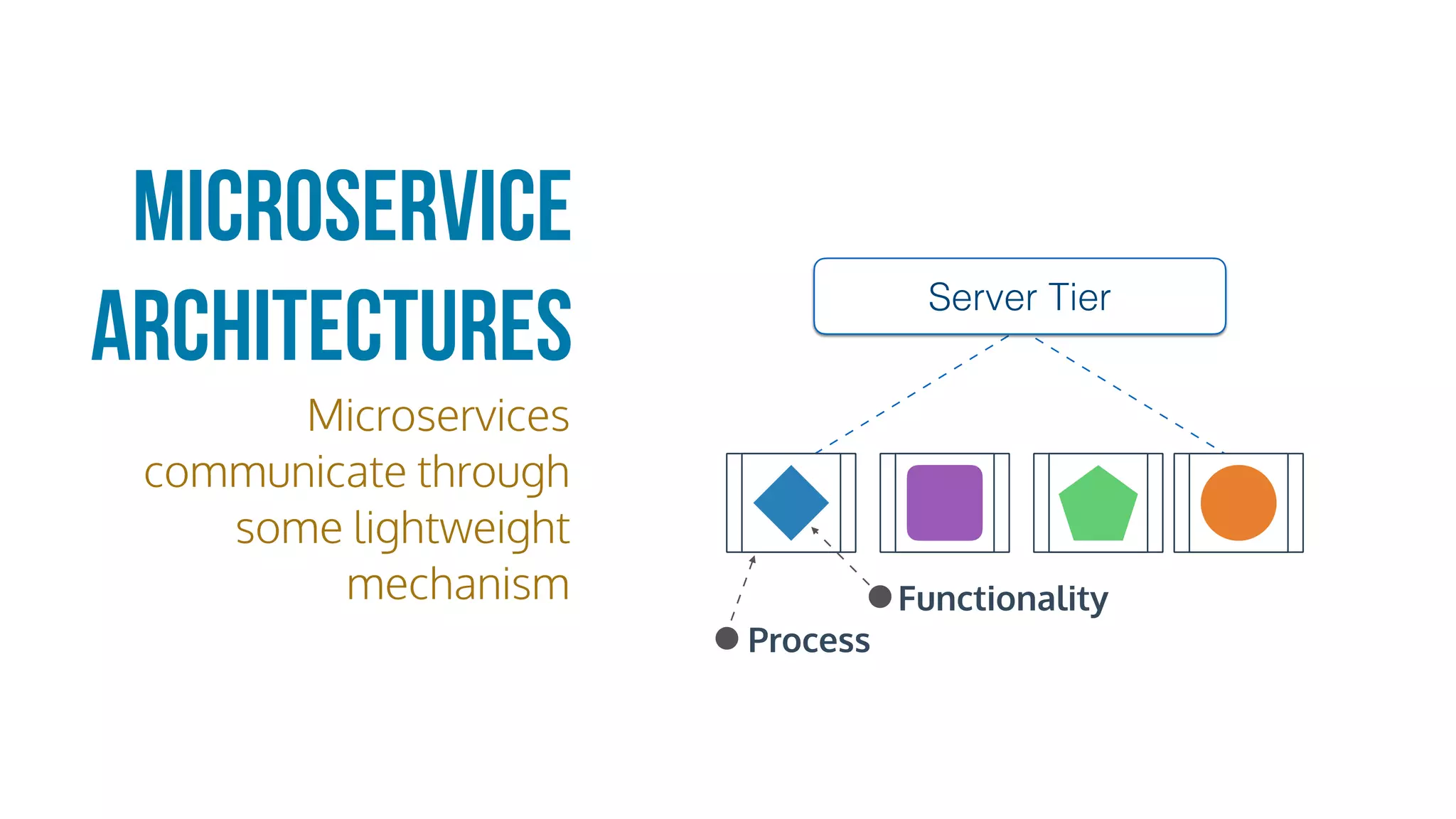
“The microservice architectural style
is an approach to developing a single
application as a suite of small
services, each running in its own
process and communicating with
lightweight mechanisms.” [2]](https://image.slidesharecdn.com/2016-160129101550/85/Microservices-Architecture-with-Vortex-Part-II-2-320.jpg)



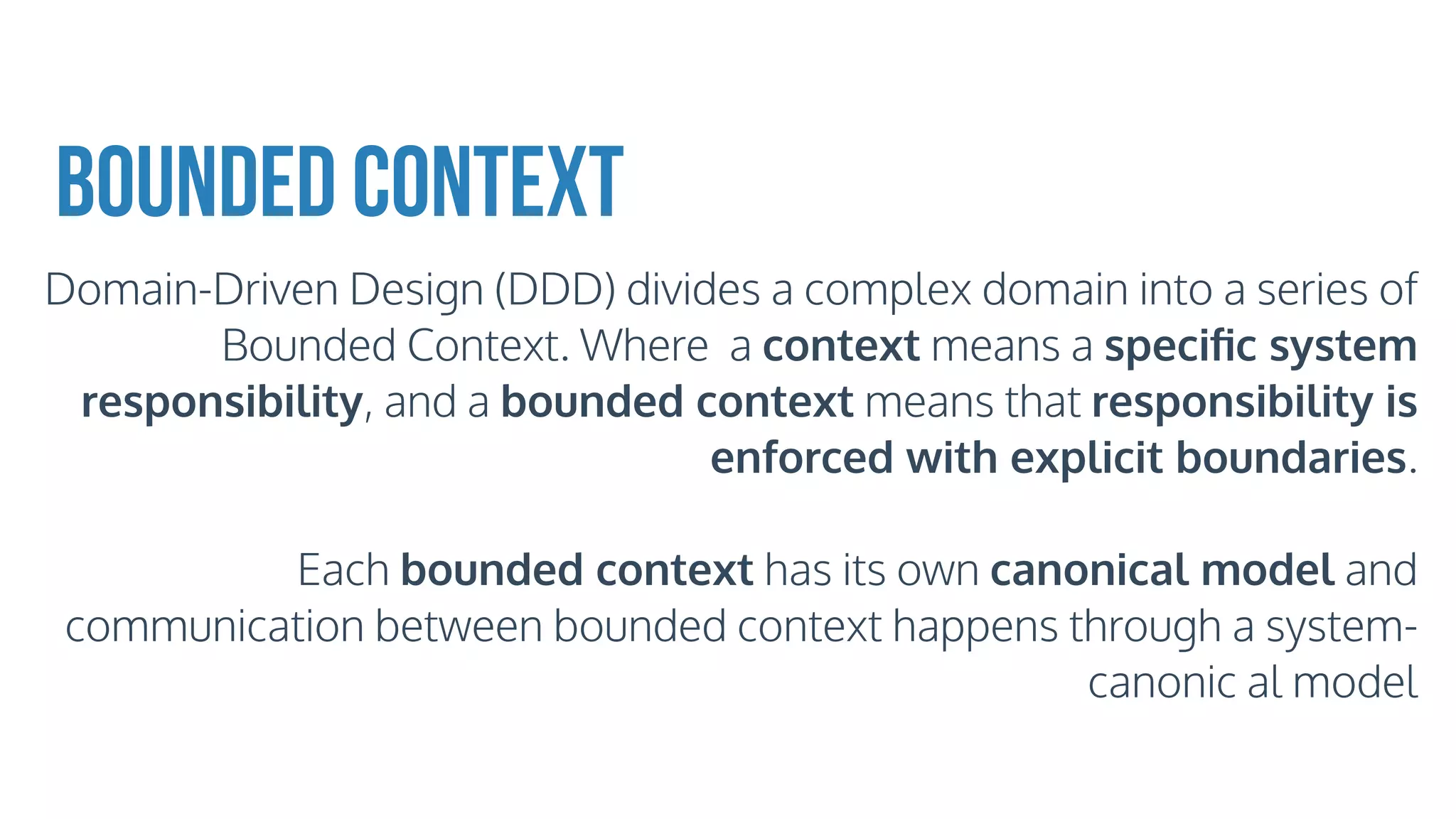
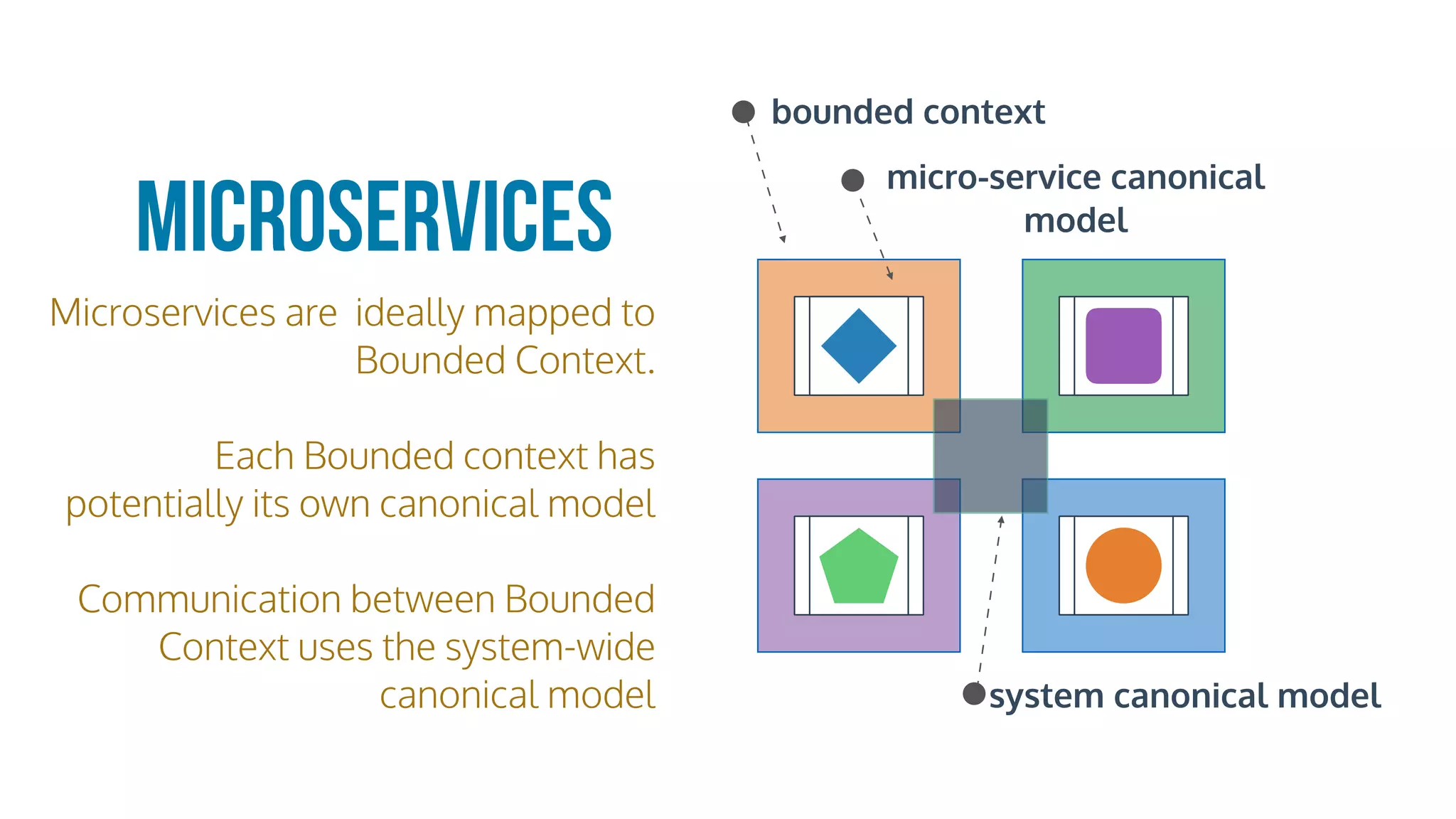
![When a system does not exist
we can use the Bounded
Context as defined in [3]
System Objectives
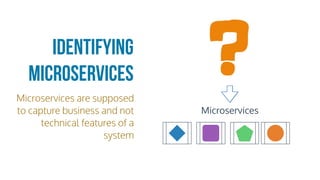
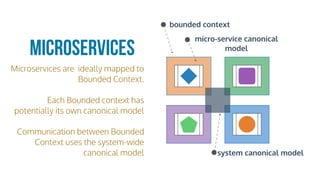
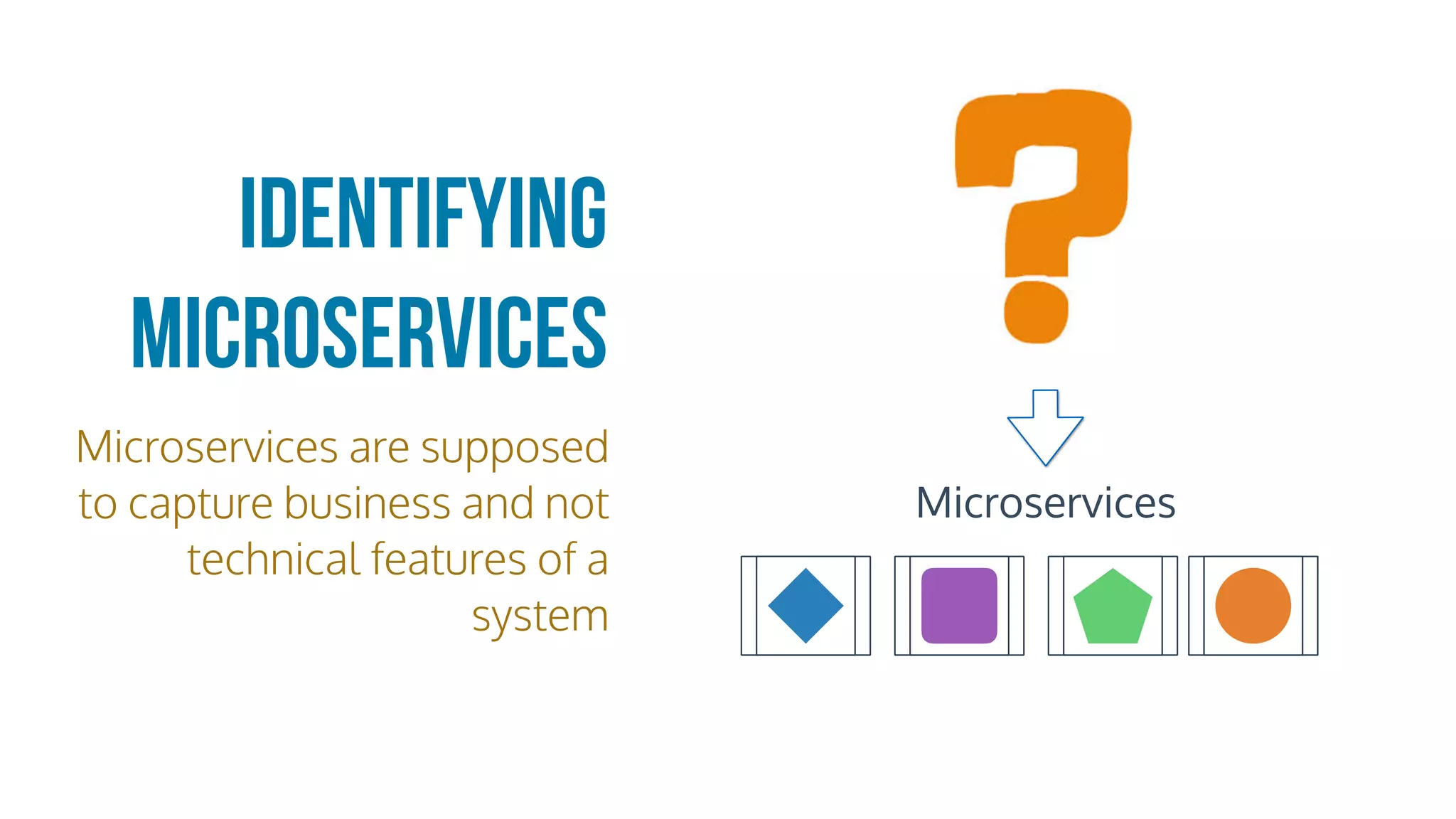
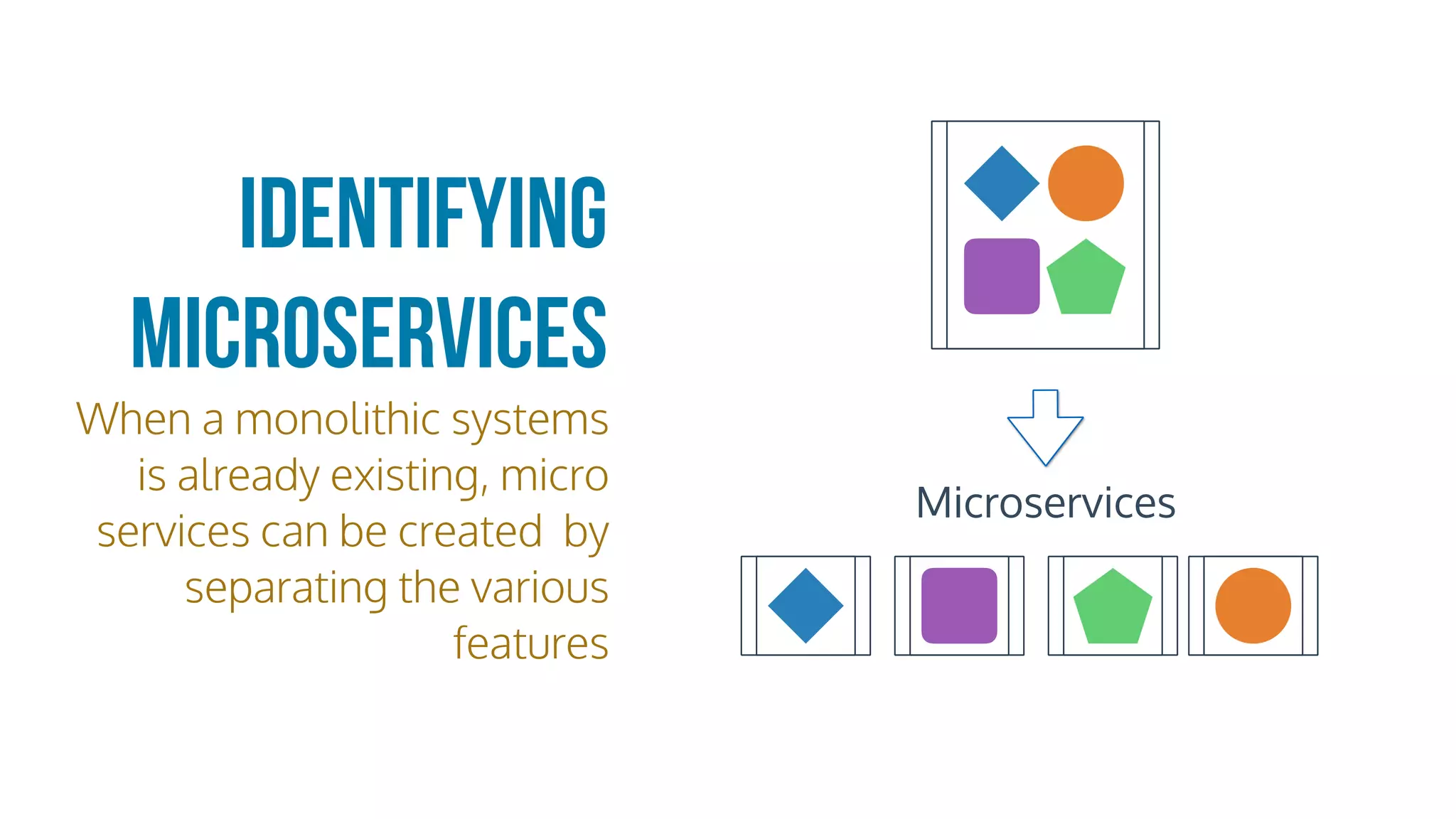
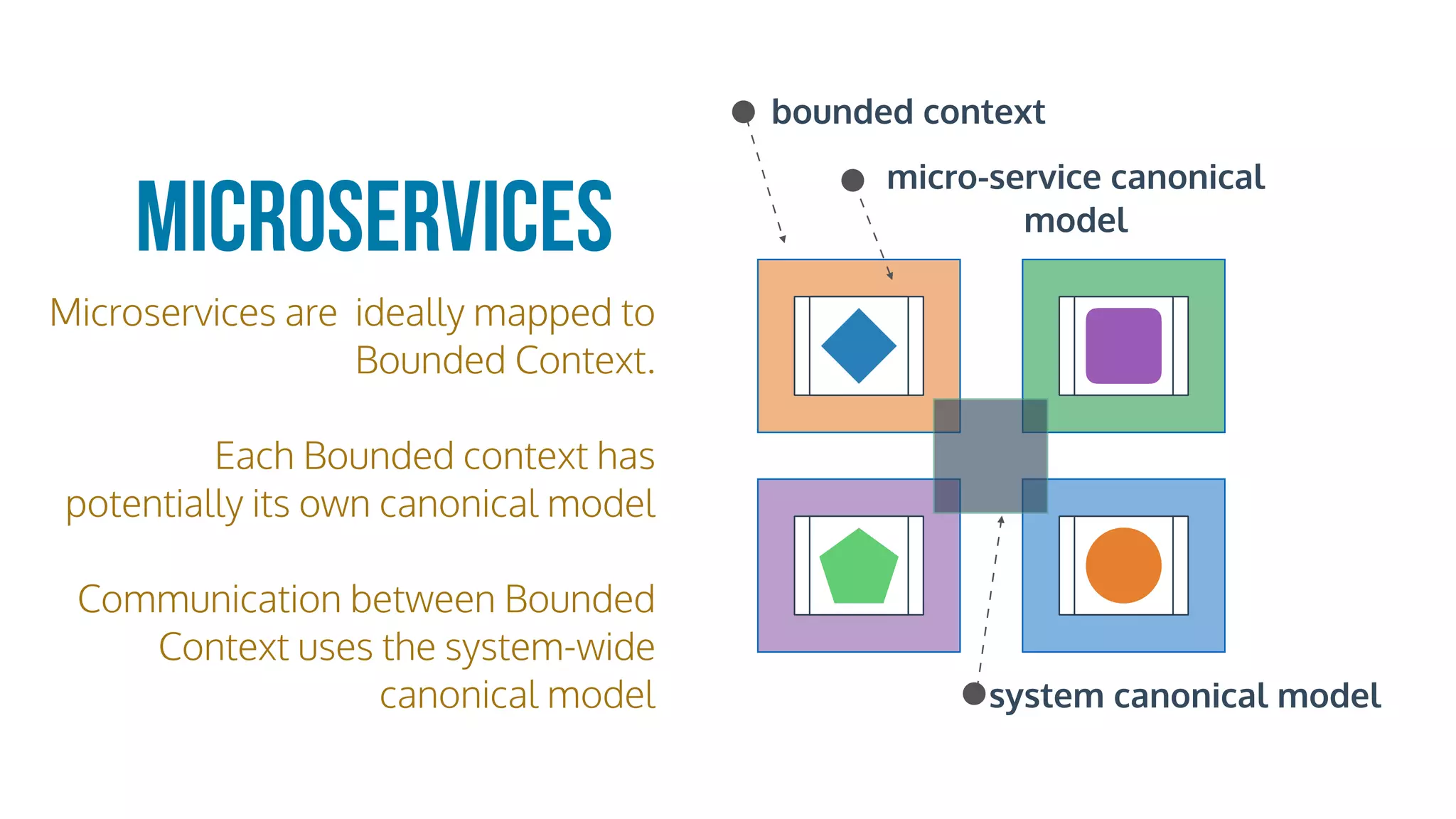
Microservices
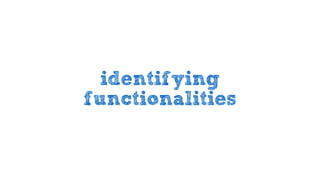
Identifying
Microservices Bounded Context](https://image.slidesharecdn.com/2016-160129101550/85/Microservices-Architecture-with-Vortex-Part-II-15-320.jpg)






























![[1] S. Newman. Building Microservices.
[2] M. Fowler, J. Lewis. Microservices
[3] E. Evans, Domain-Driven Design](https://image.slidesharecdn.com/2016-160129101550/85/Microservices-Architecture-with-Vortex-Part-II-74-320.jpg)


![microservice
Architectural
style
“The microservice architectural style
is an approach to developing a single
application as a suite of small
services, each running in its own
process and communicating with
lightweight mechanisms.” [2]](https://image.slidesharecdn.com/2016-160129101550/75/Microservices-Architecture-with-Vortex-Part-II-2-2048.jpg)

![When a system does not exist
we can use the Bounded
Context as defined in [3]
System Objectives
Microservices
Identifying
Microservices Bounded Context](https://image.slidesharecdn.com/2016-160129101550/75/Microservices-Architecture-with-Vortex-Part-II-15-2048.jpg)


















![[1] S. Newman. Building Microservices.
[2] M. Fowler, J. Lewis. Microservices
[3] E. Evans, Domain-Driven Design](https://image.slidesharecdn.com/2016-160129101550/75/Microservices-Architecture-with-Vortex-Part-II-74-2048.jpg)


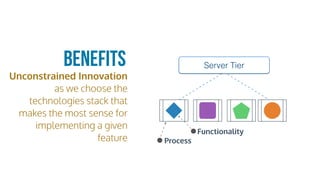
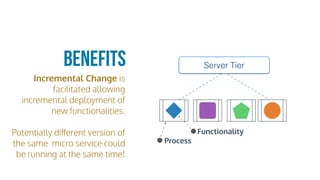
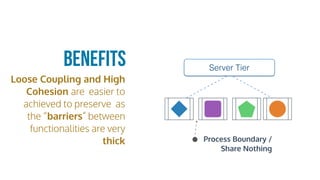
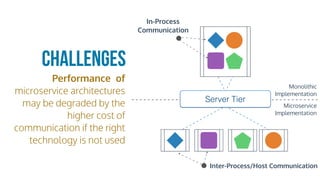
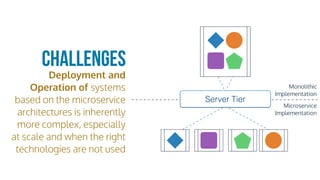
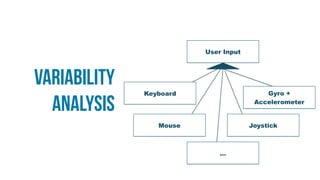
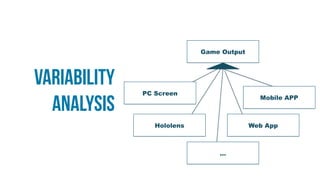
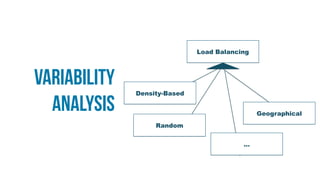
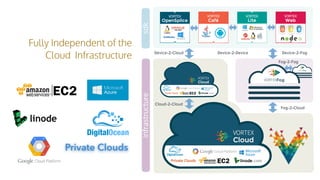
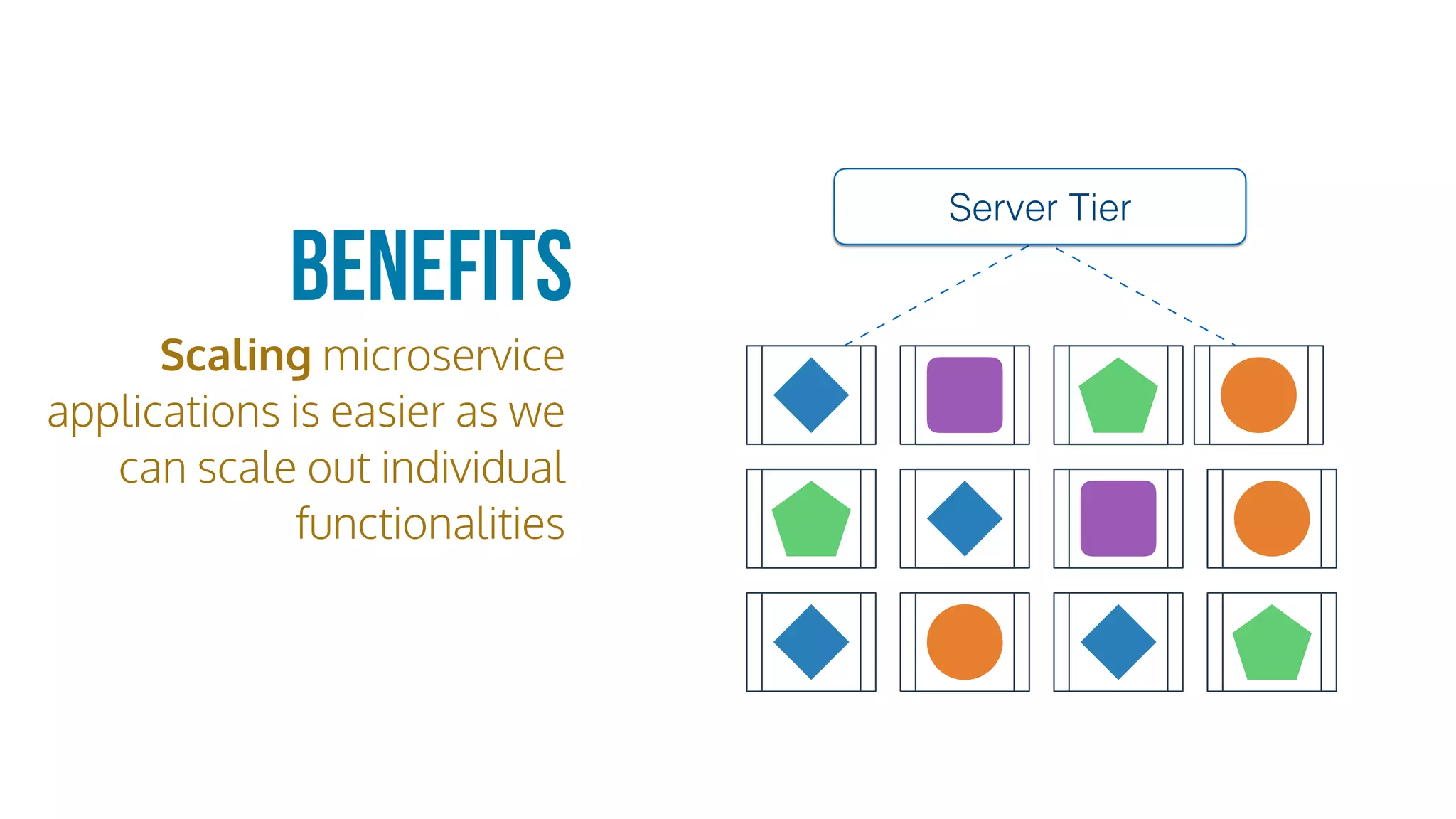
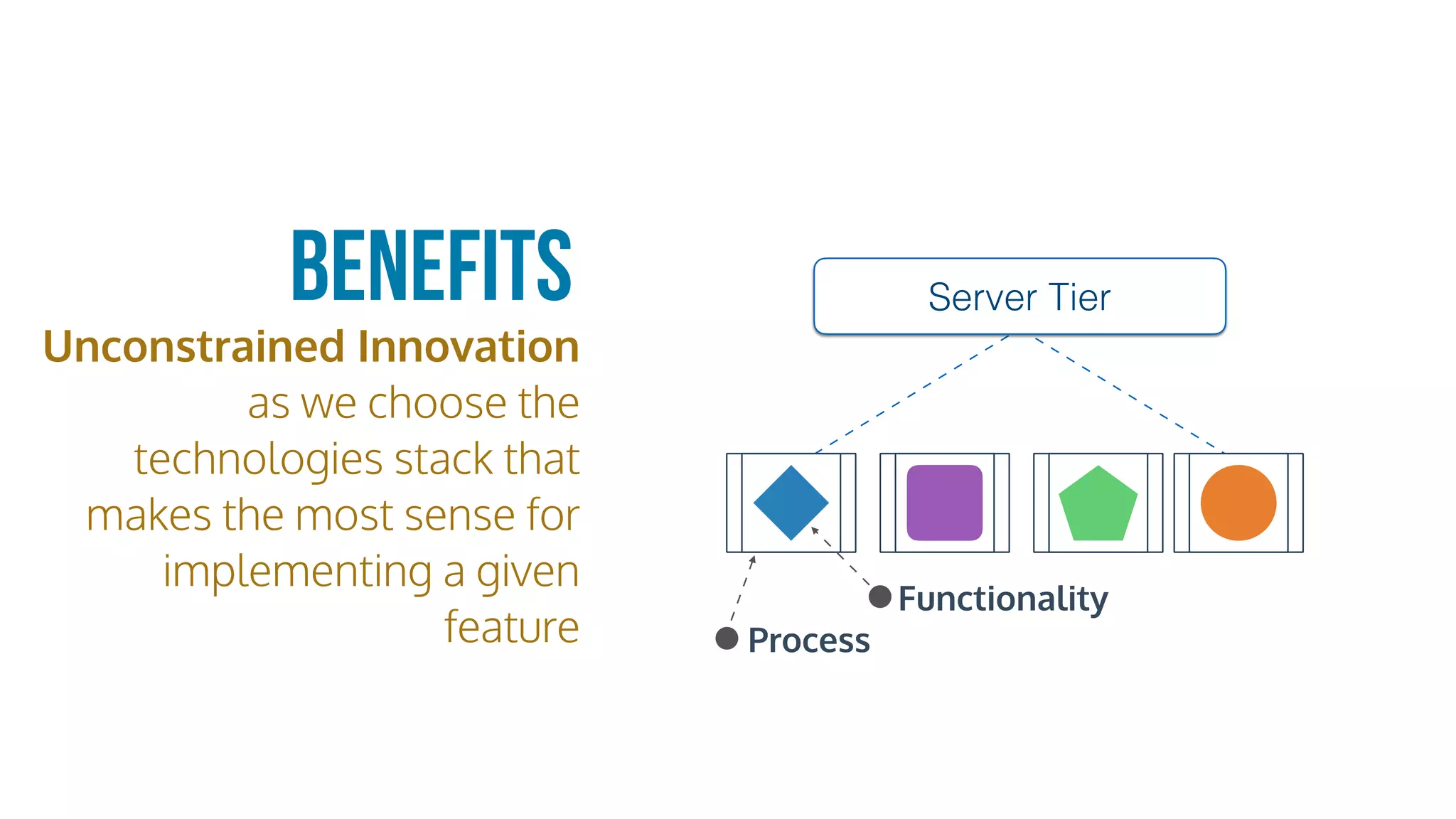
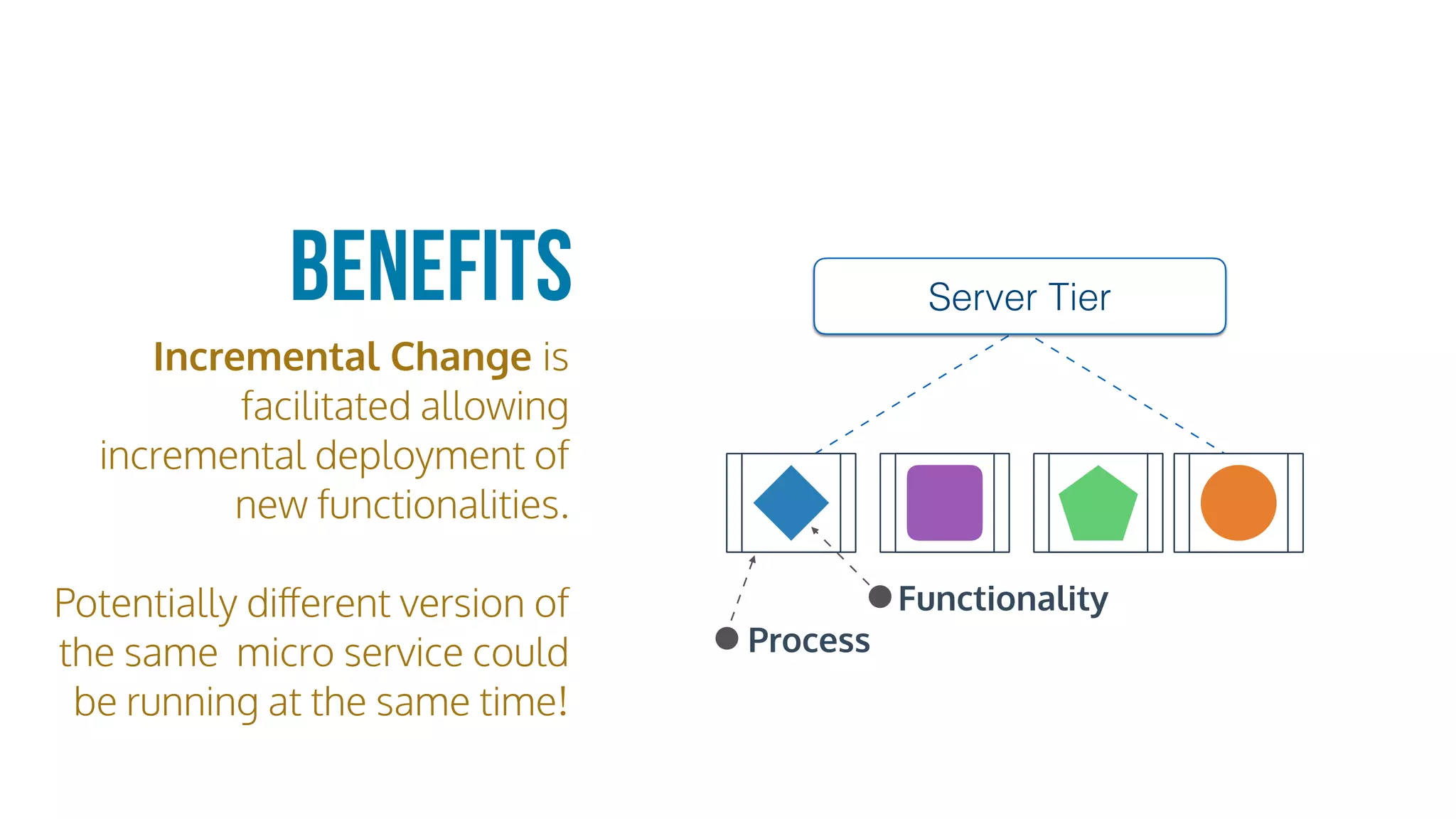
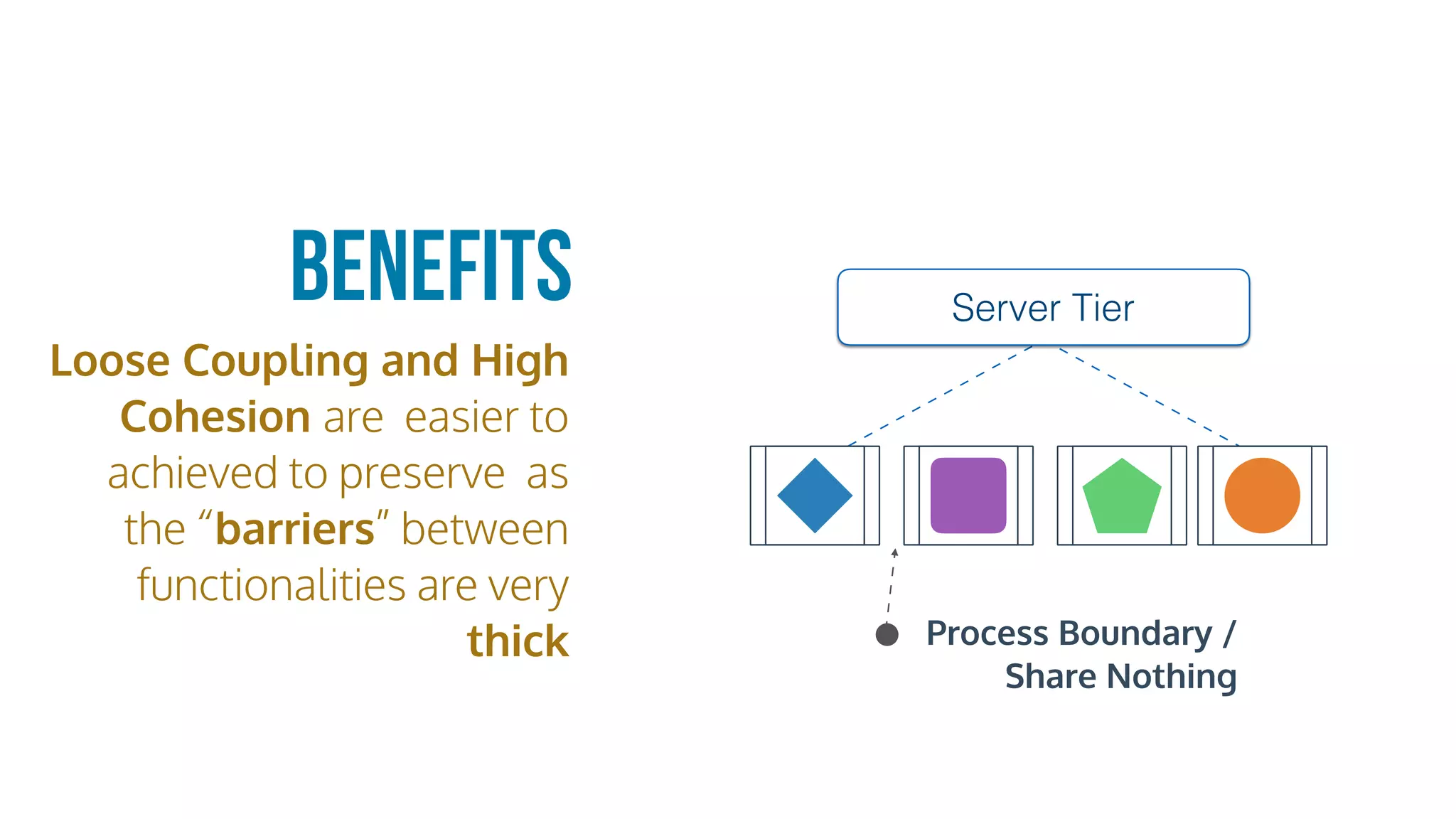
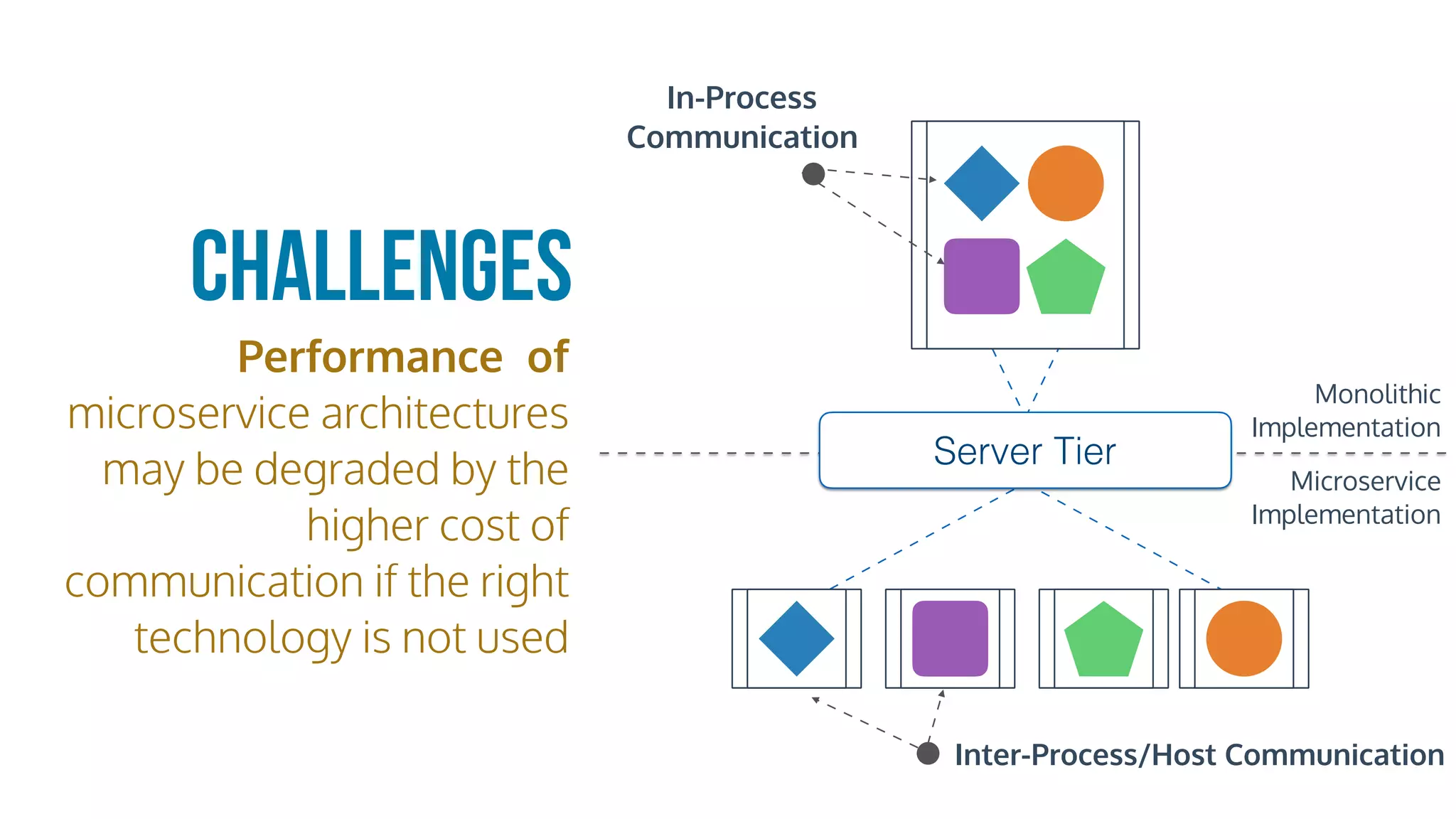
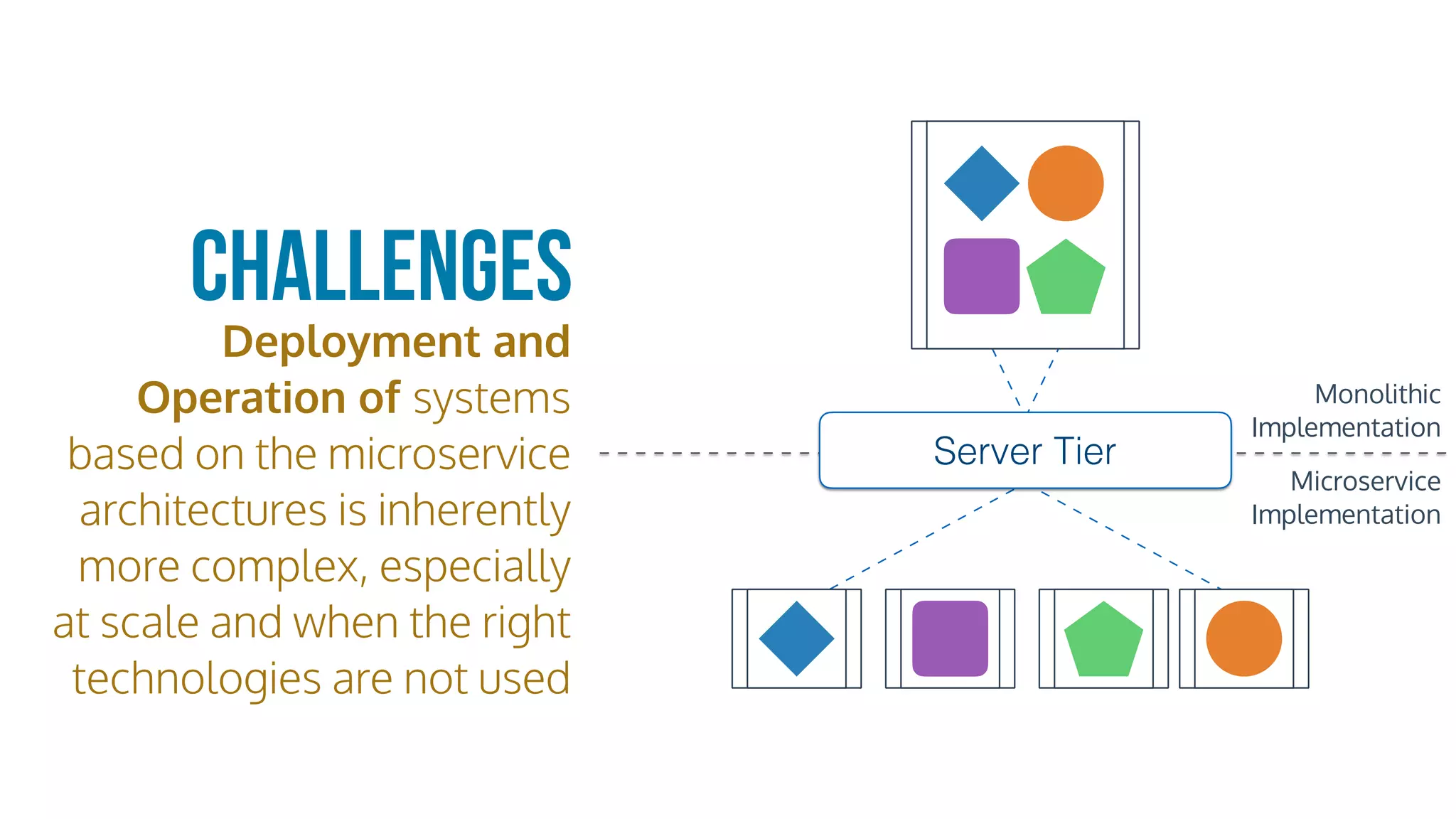
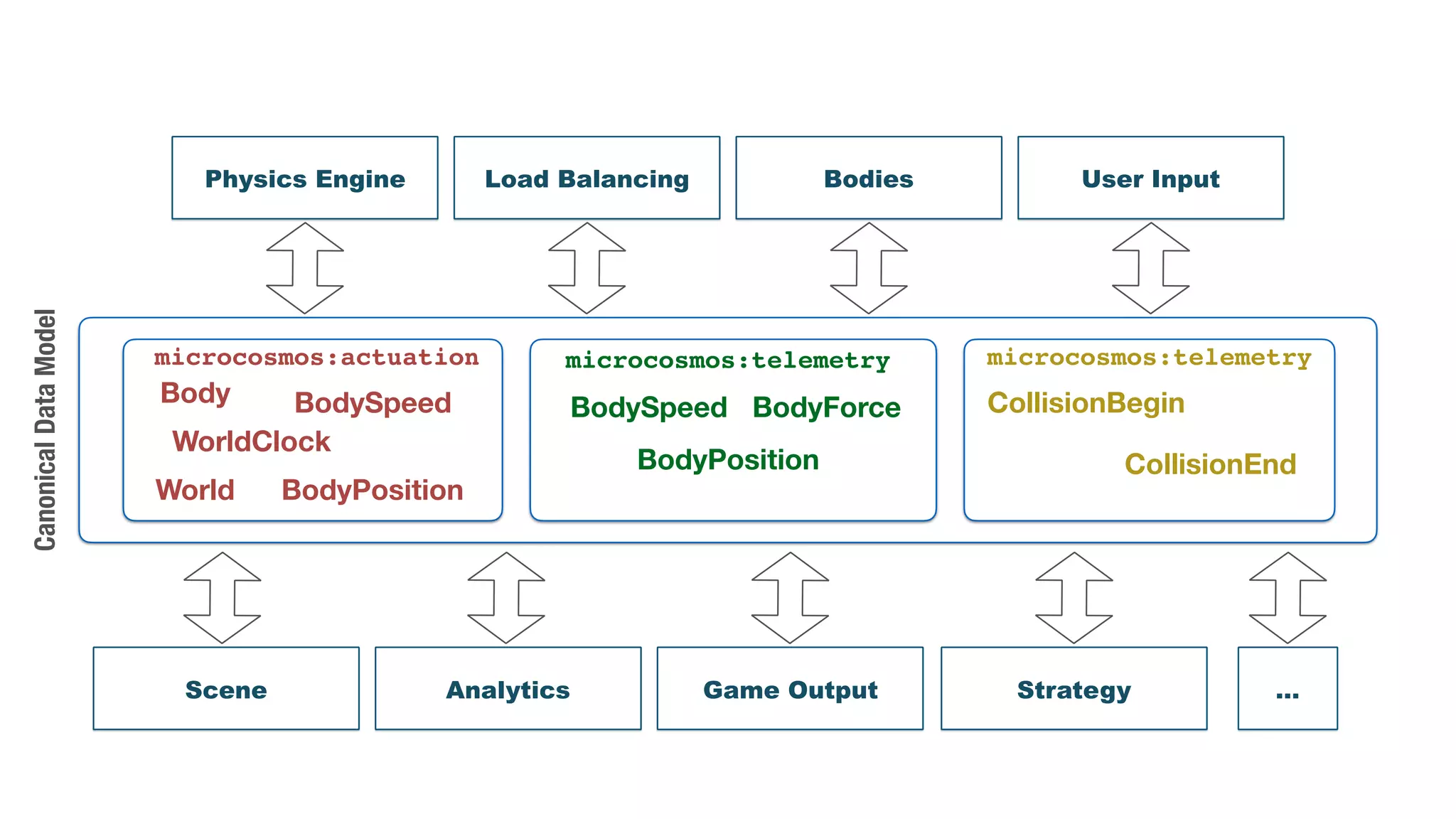
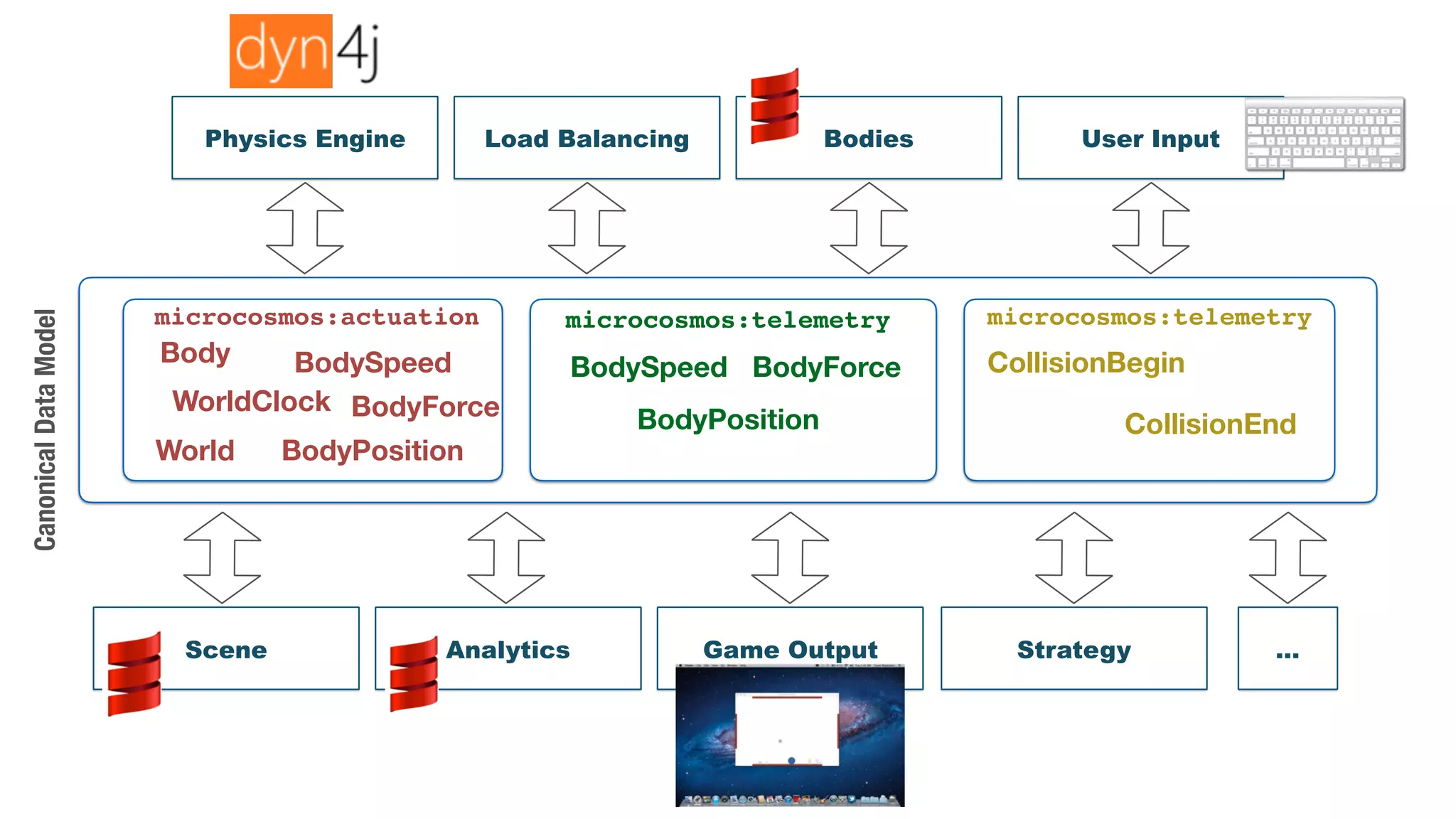
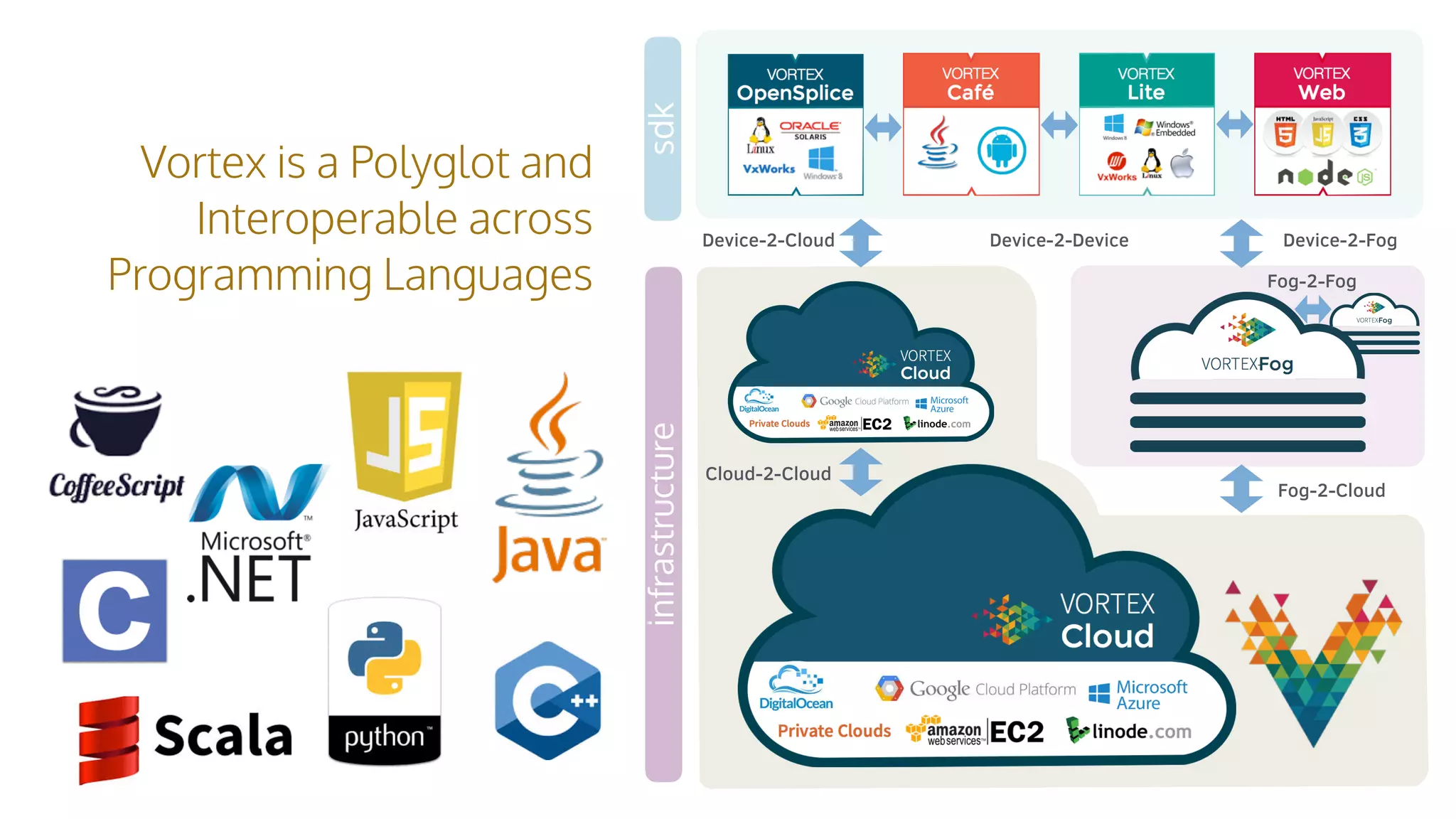
The document discusses microservice architectures, emphasizing their design as small, independent services that facilitate scalability, innovation, and incremental changes. It highlights the benefits of loose coupling and high cohesion while addressing challenges like deployment complexity and communication overhead. A case study on a gaming platform illustrates the practical application of microservices and their mapping to bounded contexts in a domain-driven design framework.










































































































