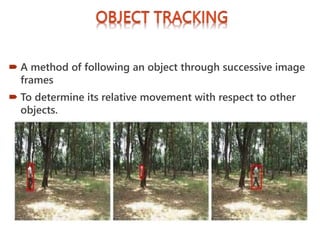
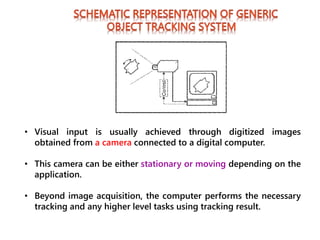
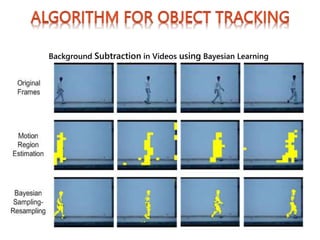
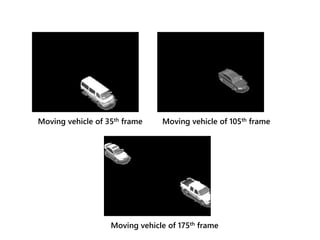
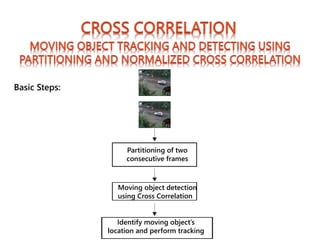
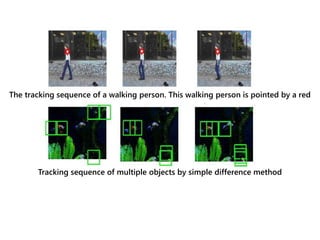
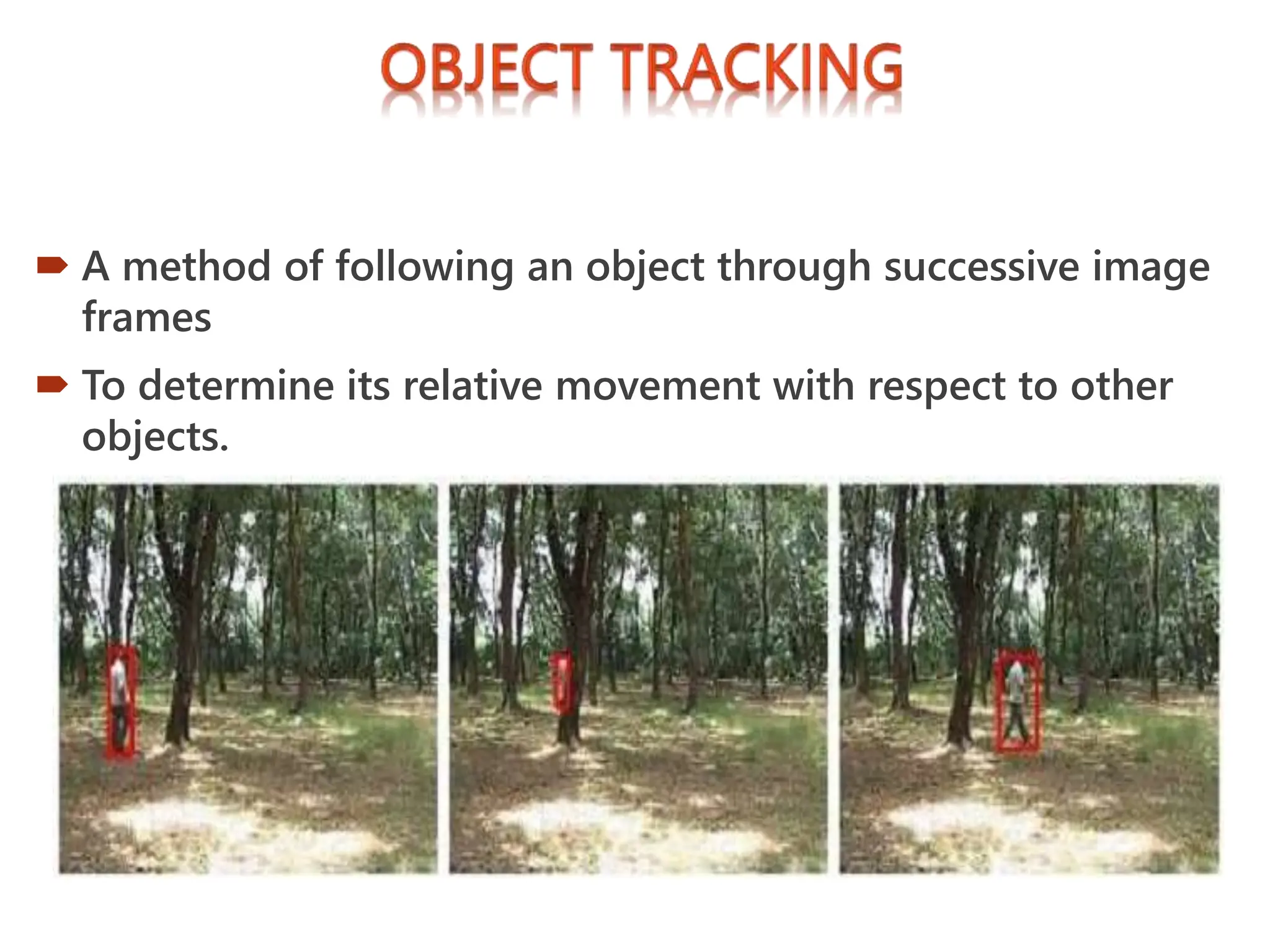
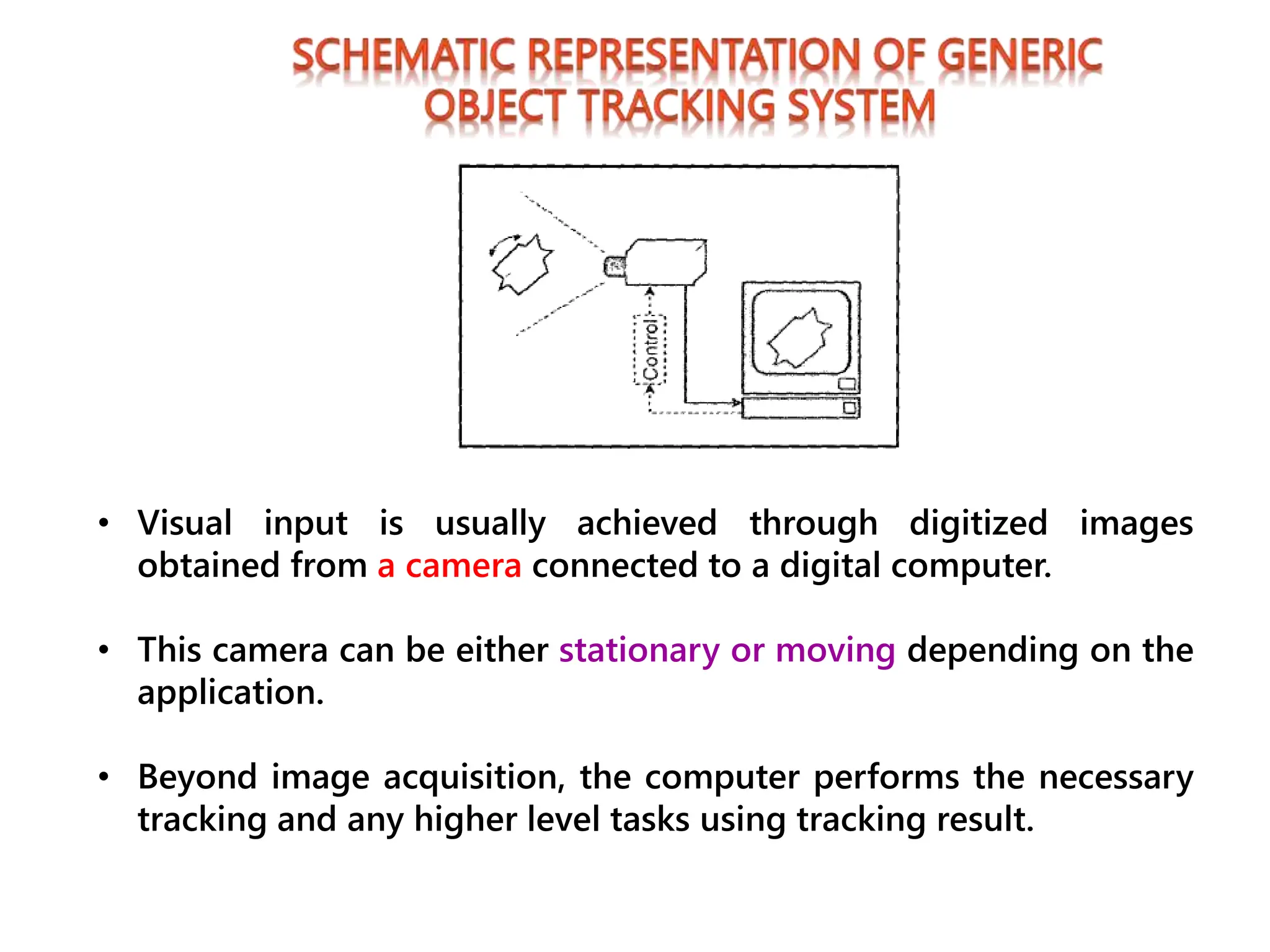
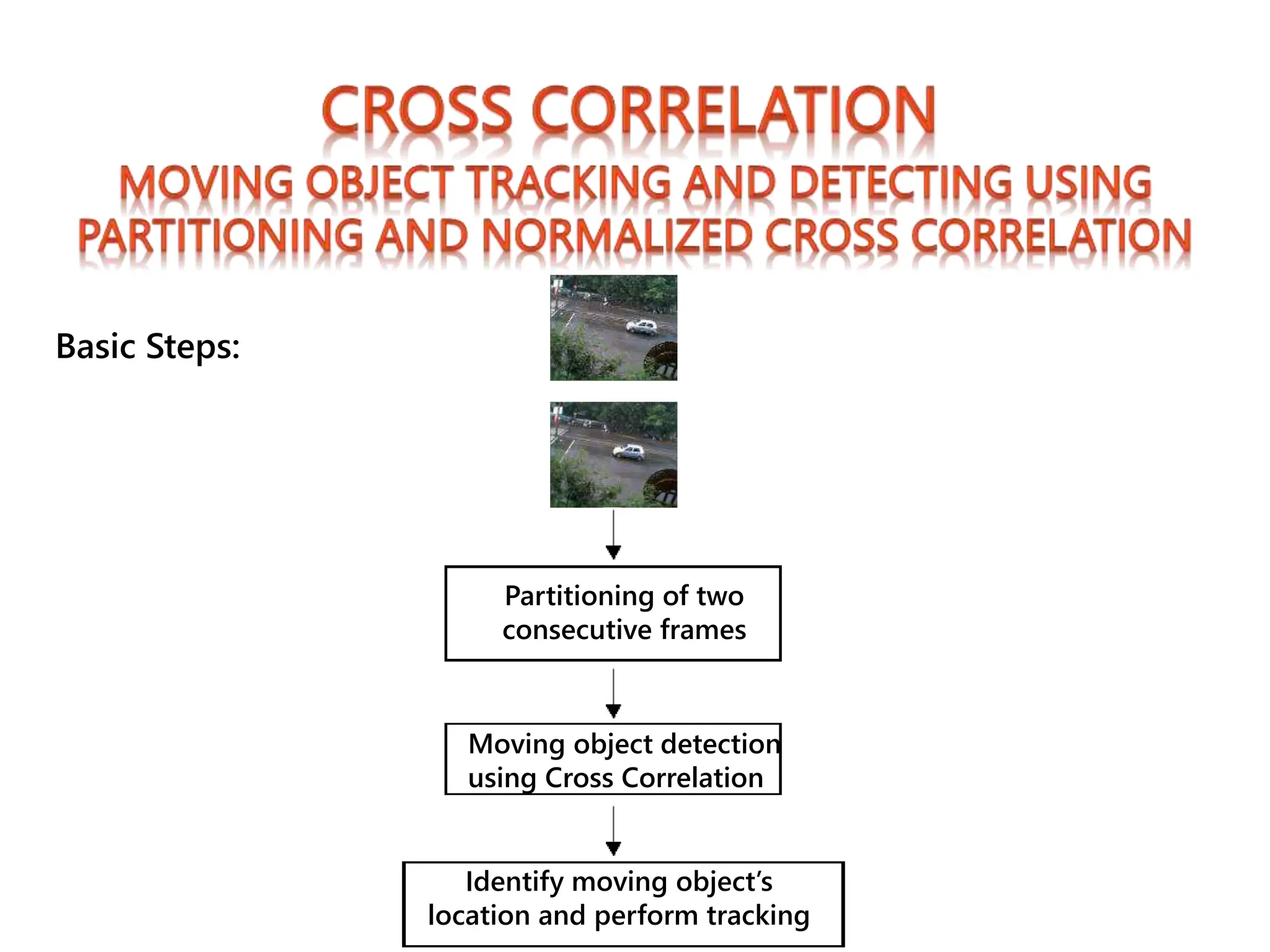
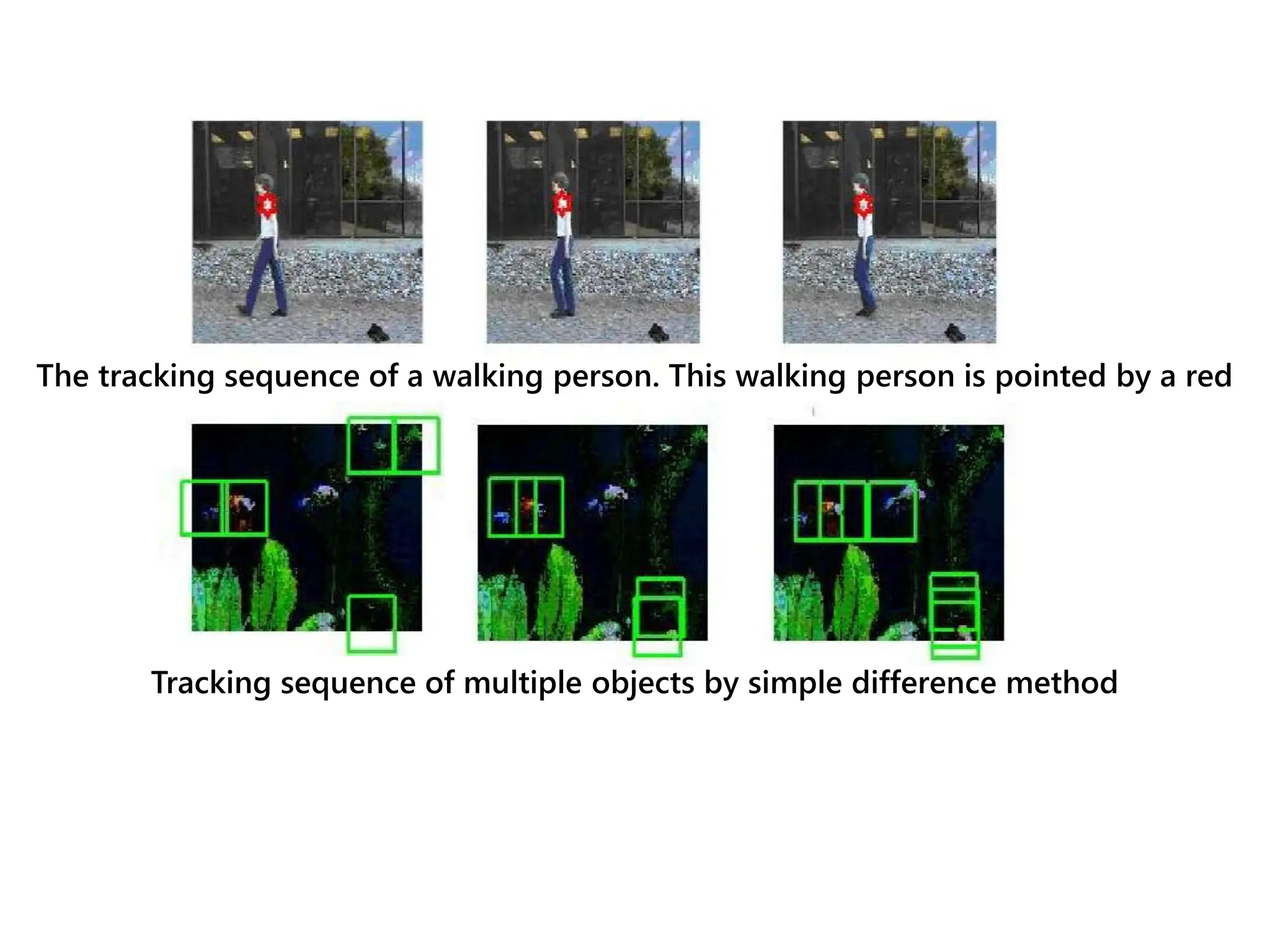
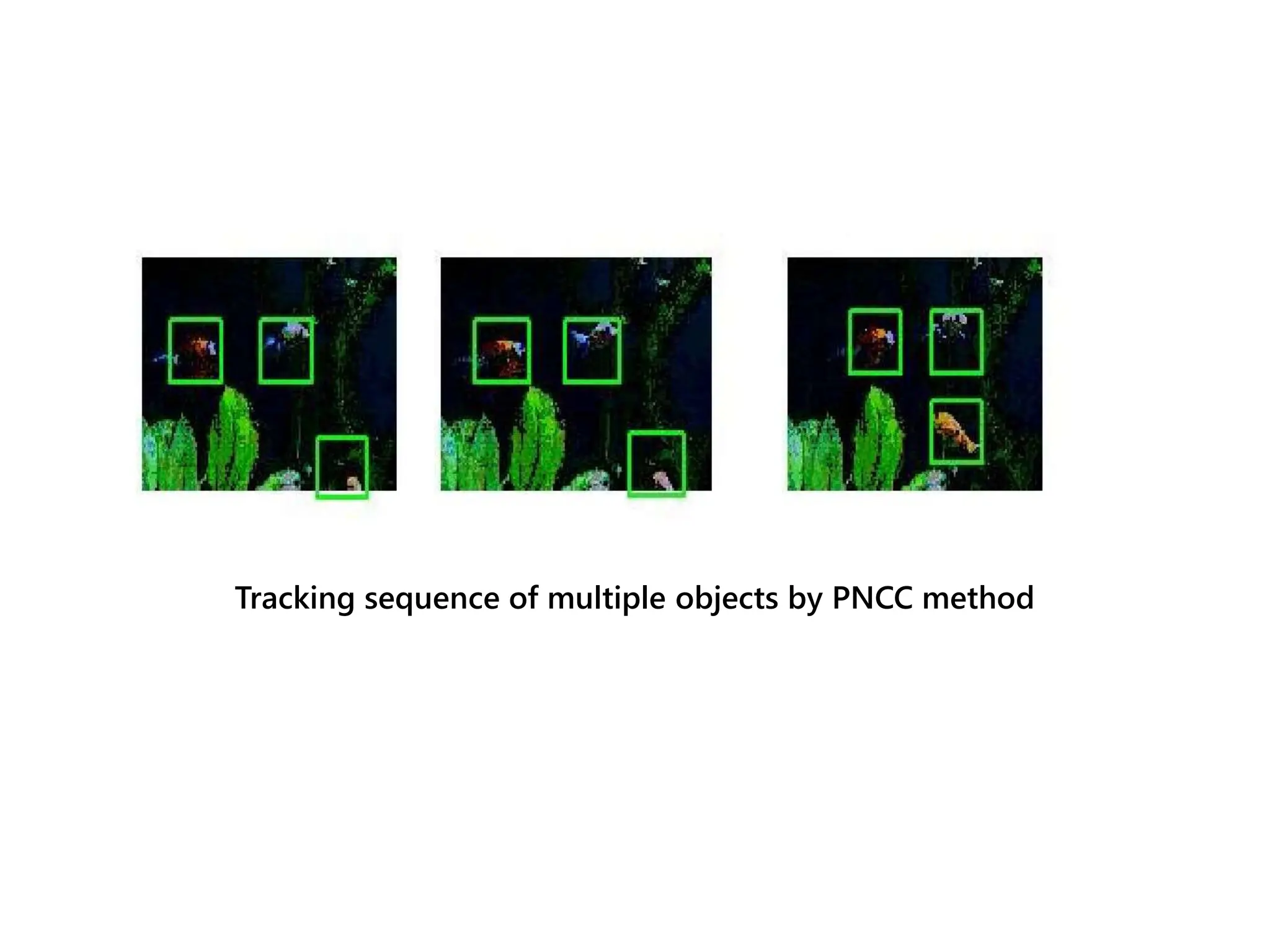
1. The document discusses object tracking and moving object detection, including algorithms for tracking objects through successive image frames.
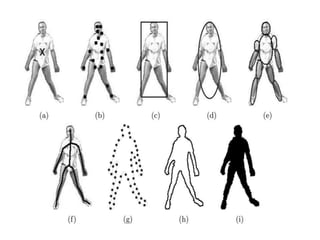
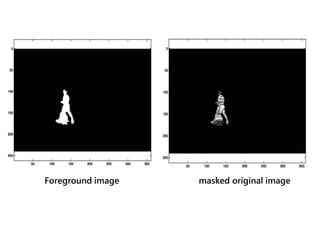
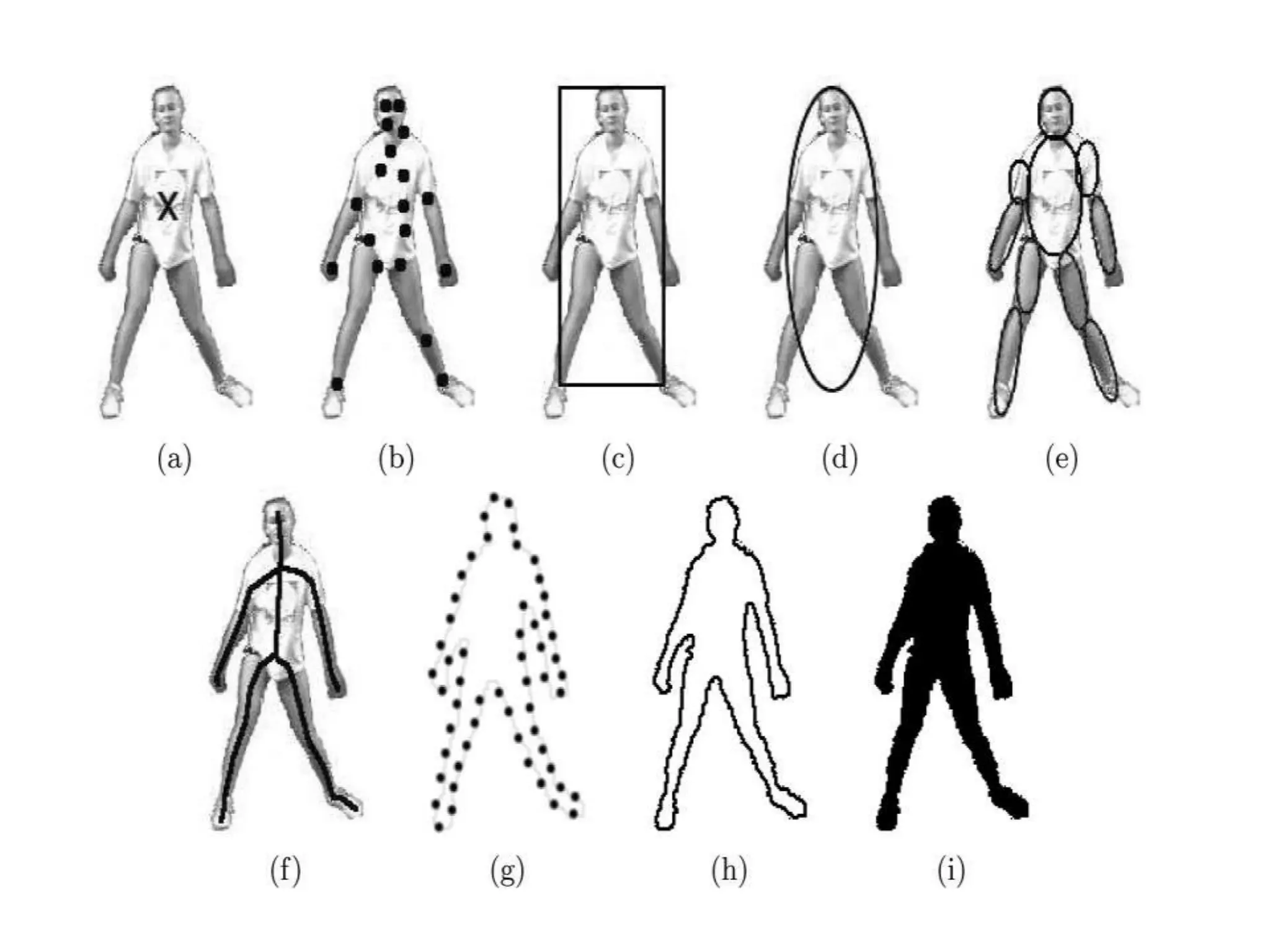
2. Object representation and feature selection are important for tracking, with common representations being points, shapes, silhouettes. Common features include color, edges, optical flow, and texture.
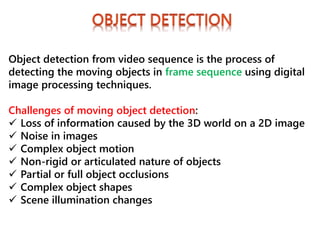
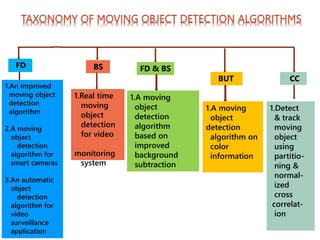
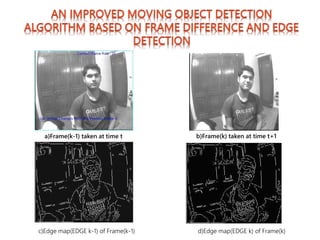
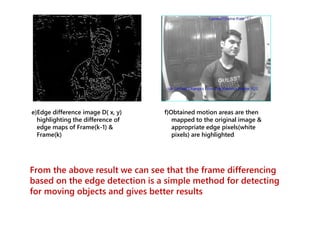
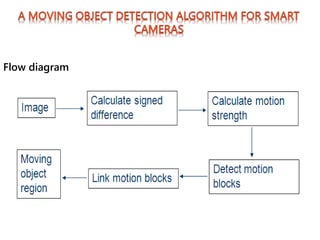
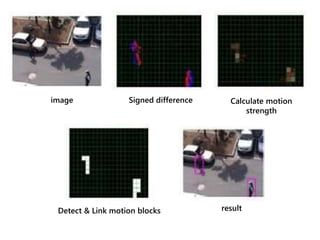
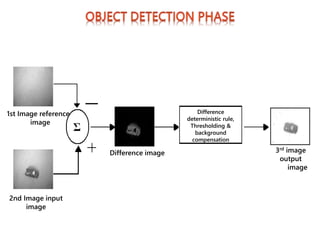
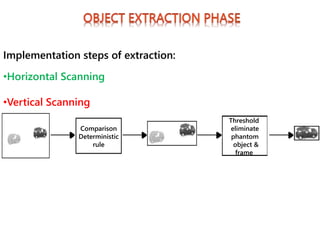
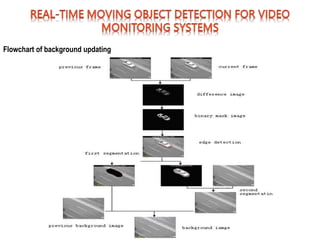
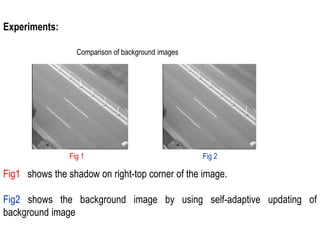
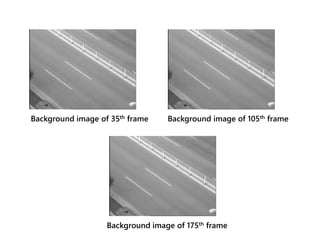
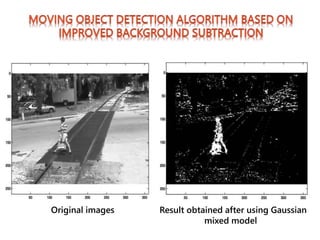
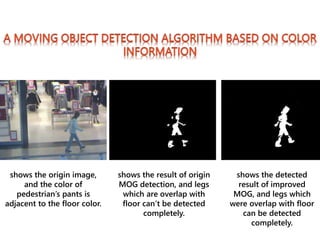
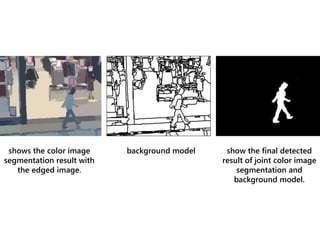
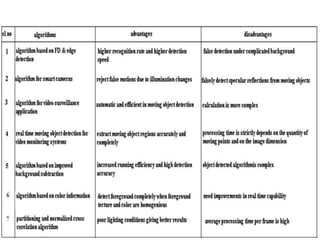
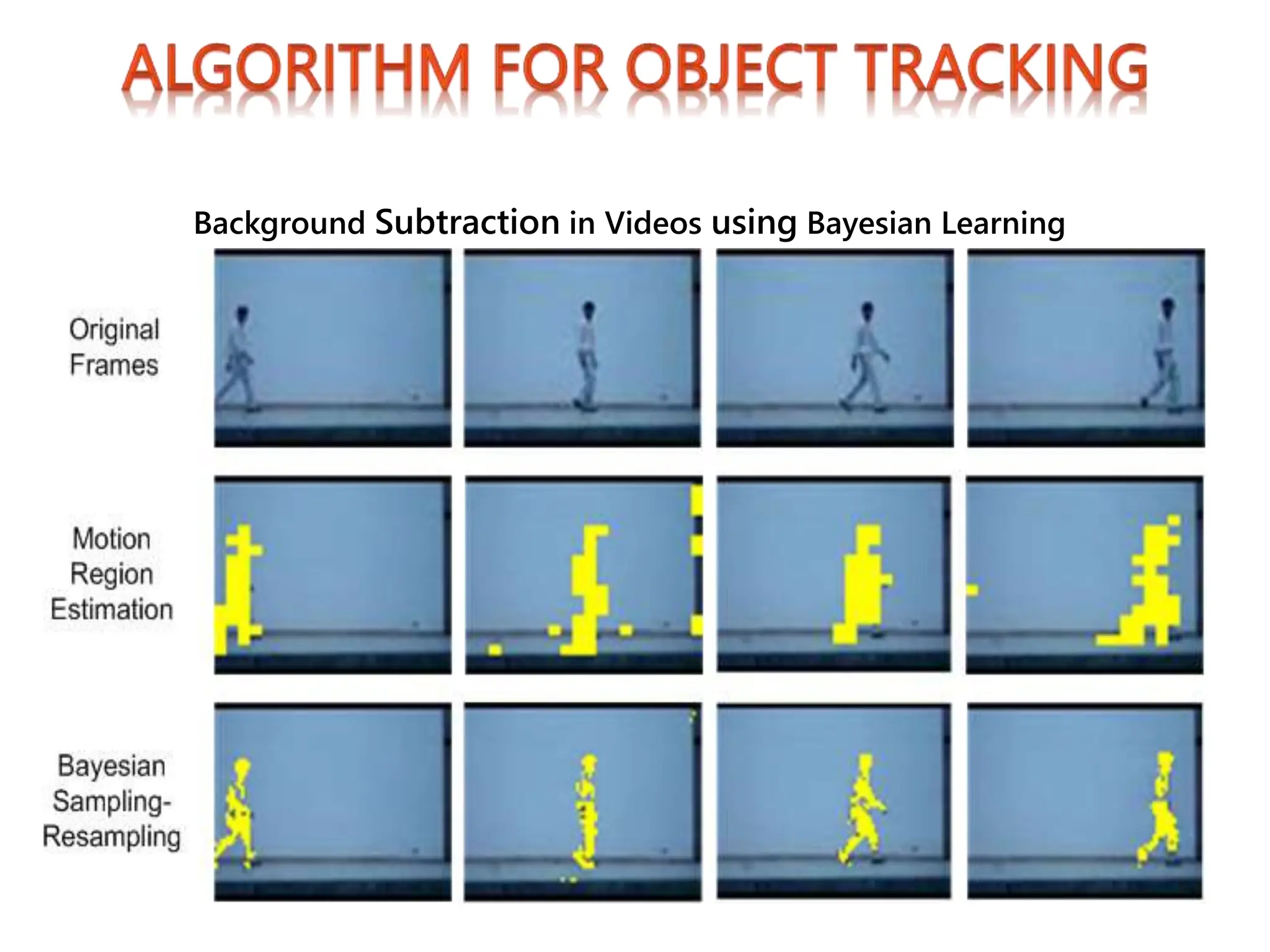
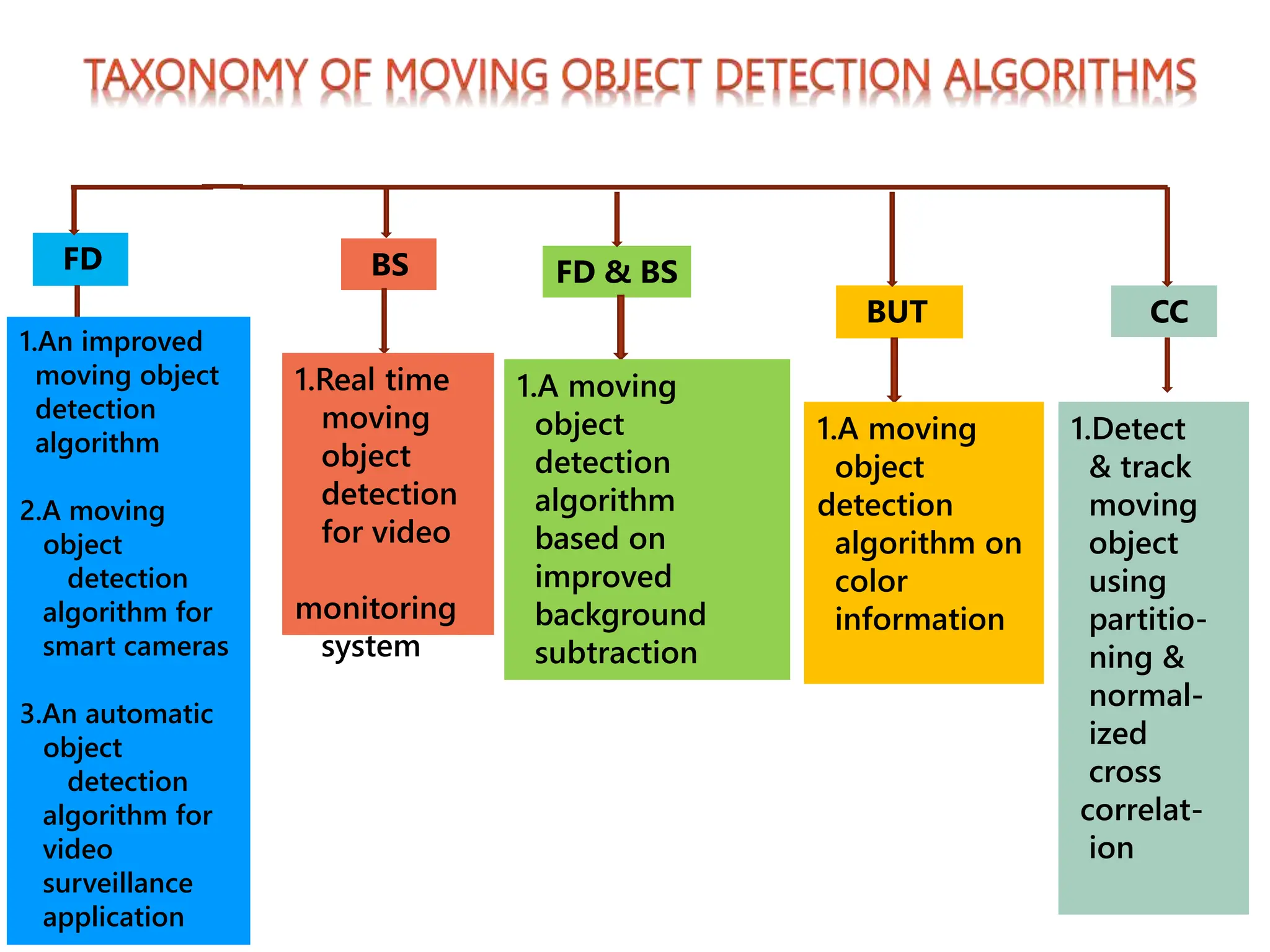
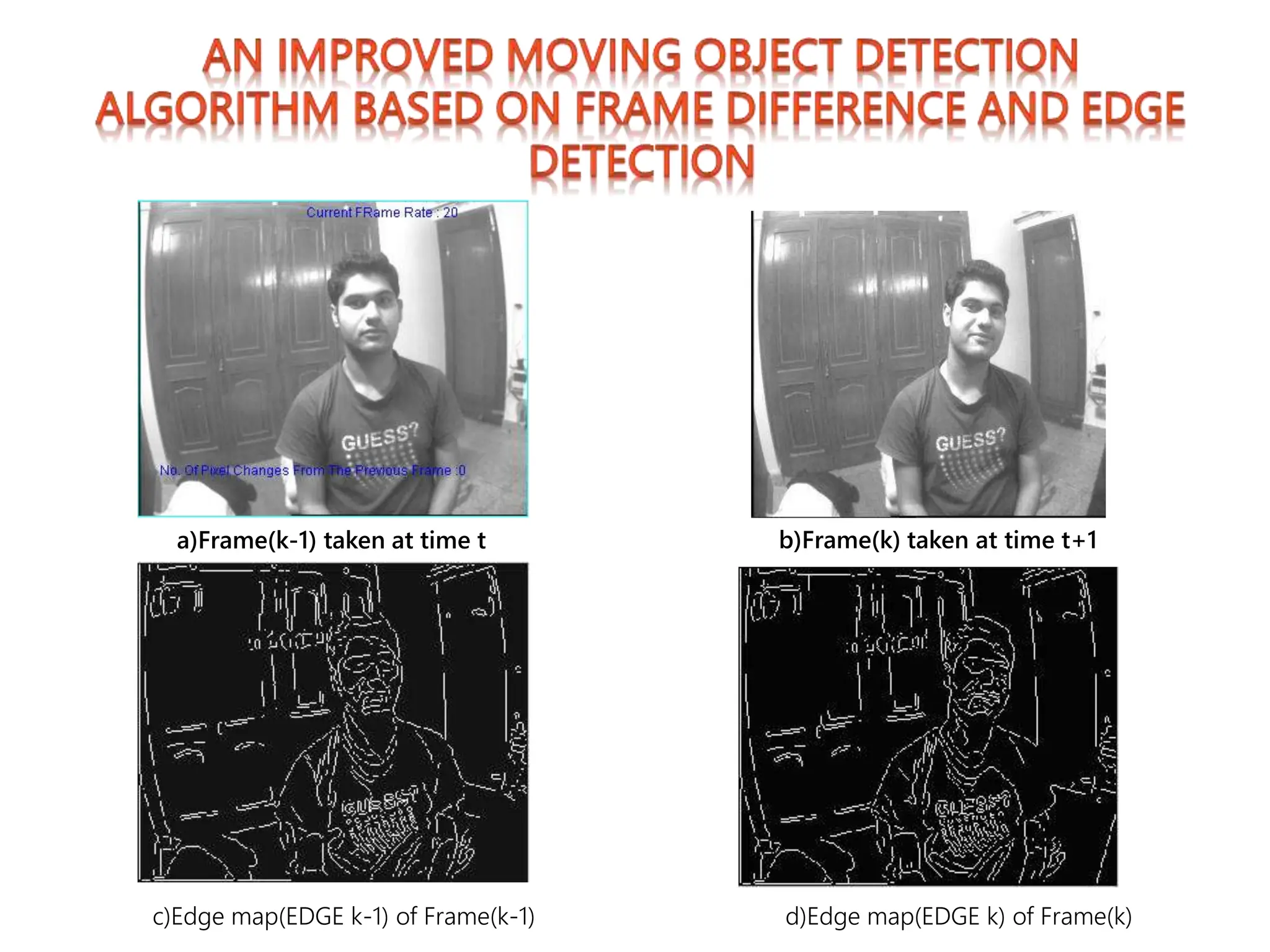
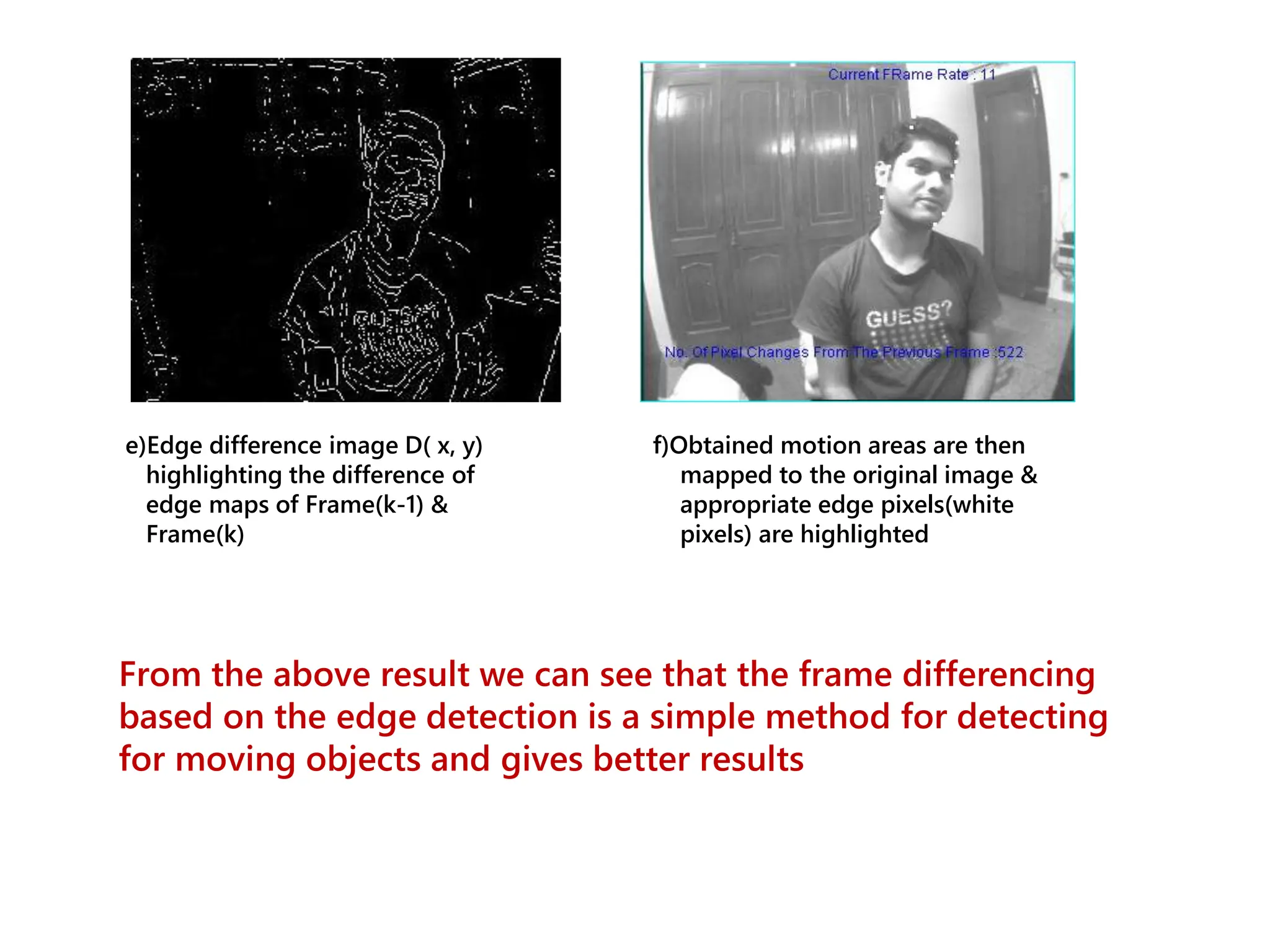
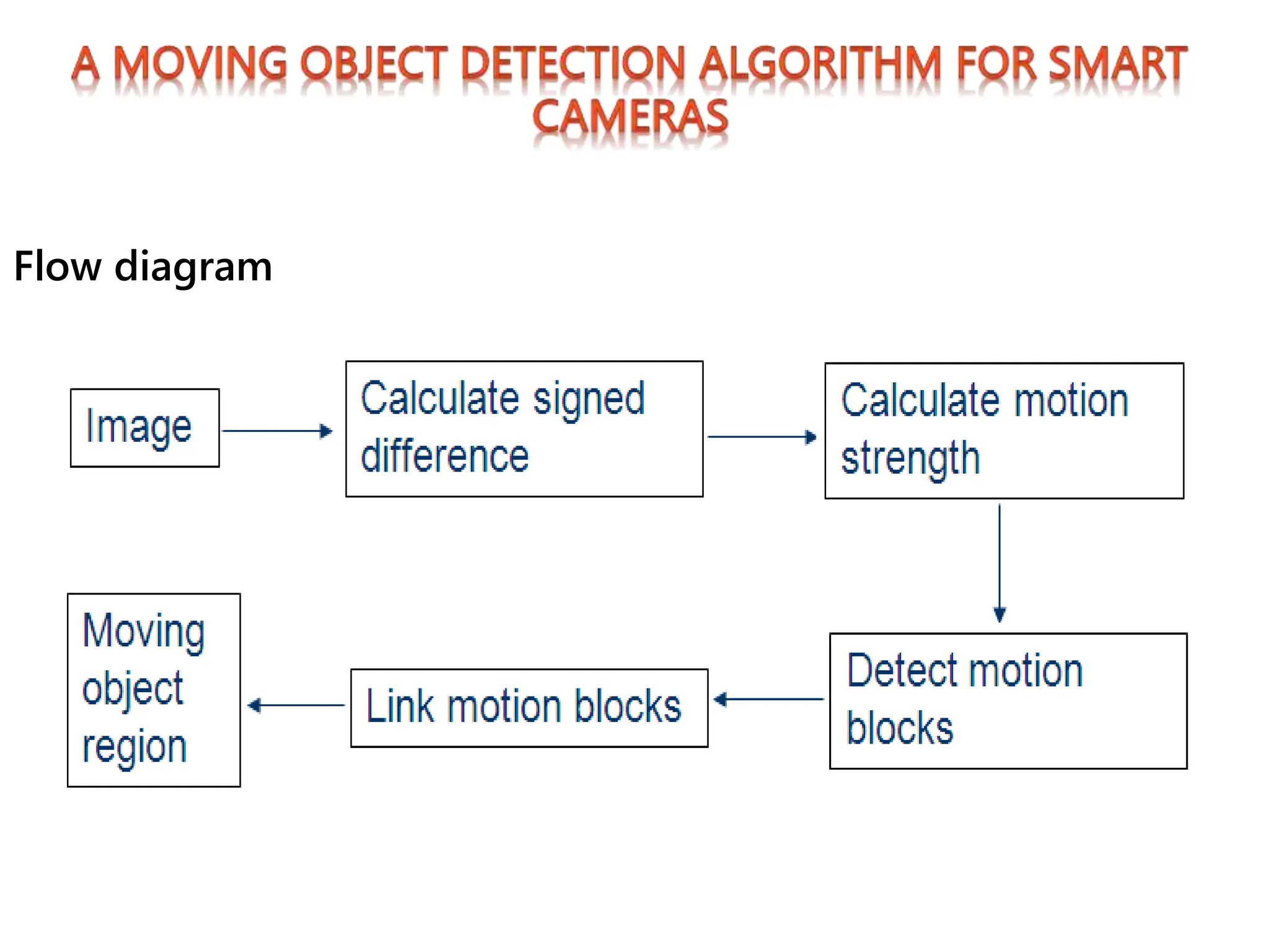
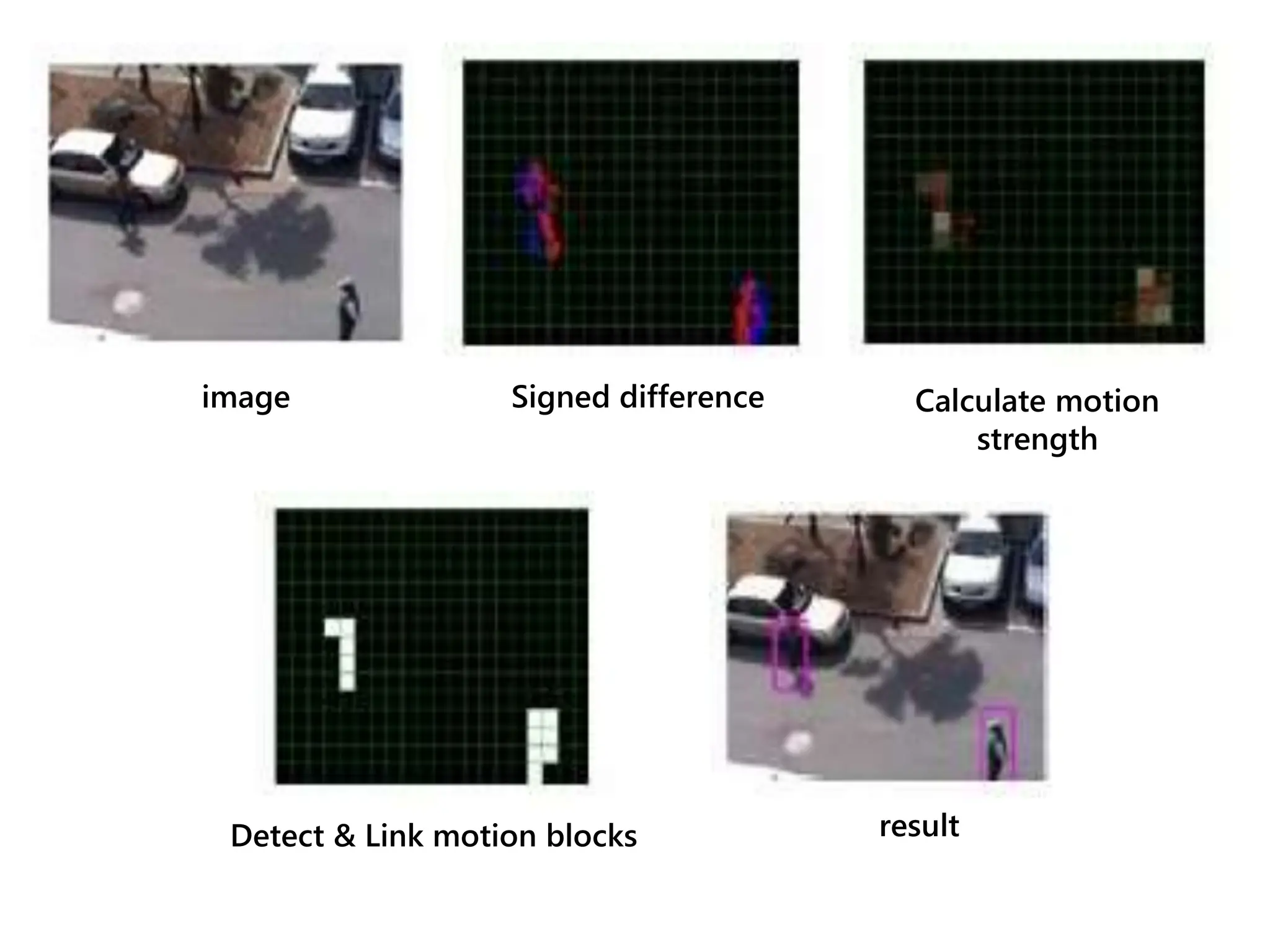
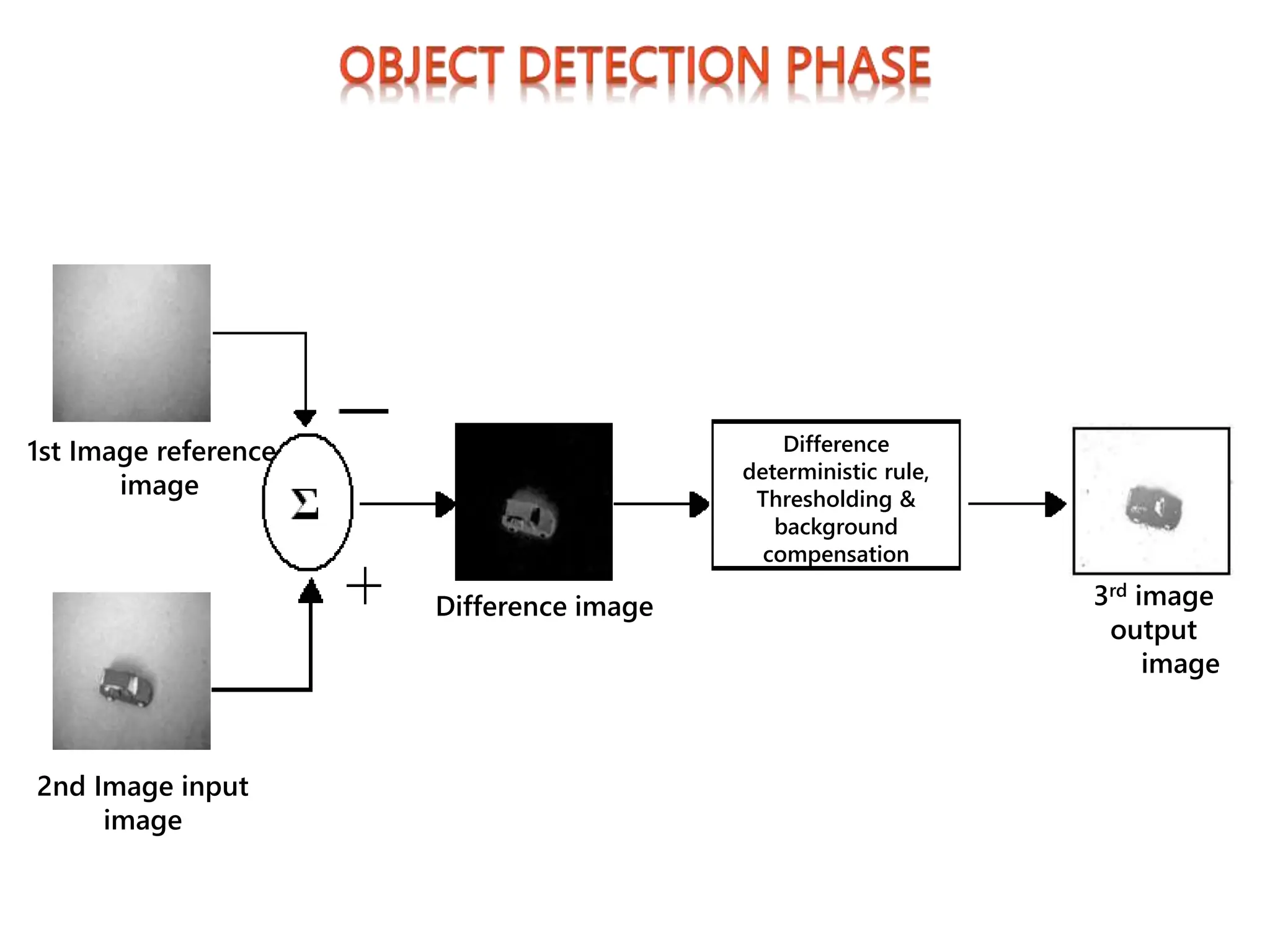
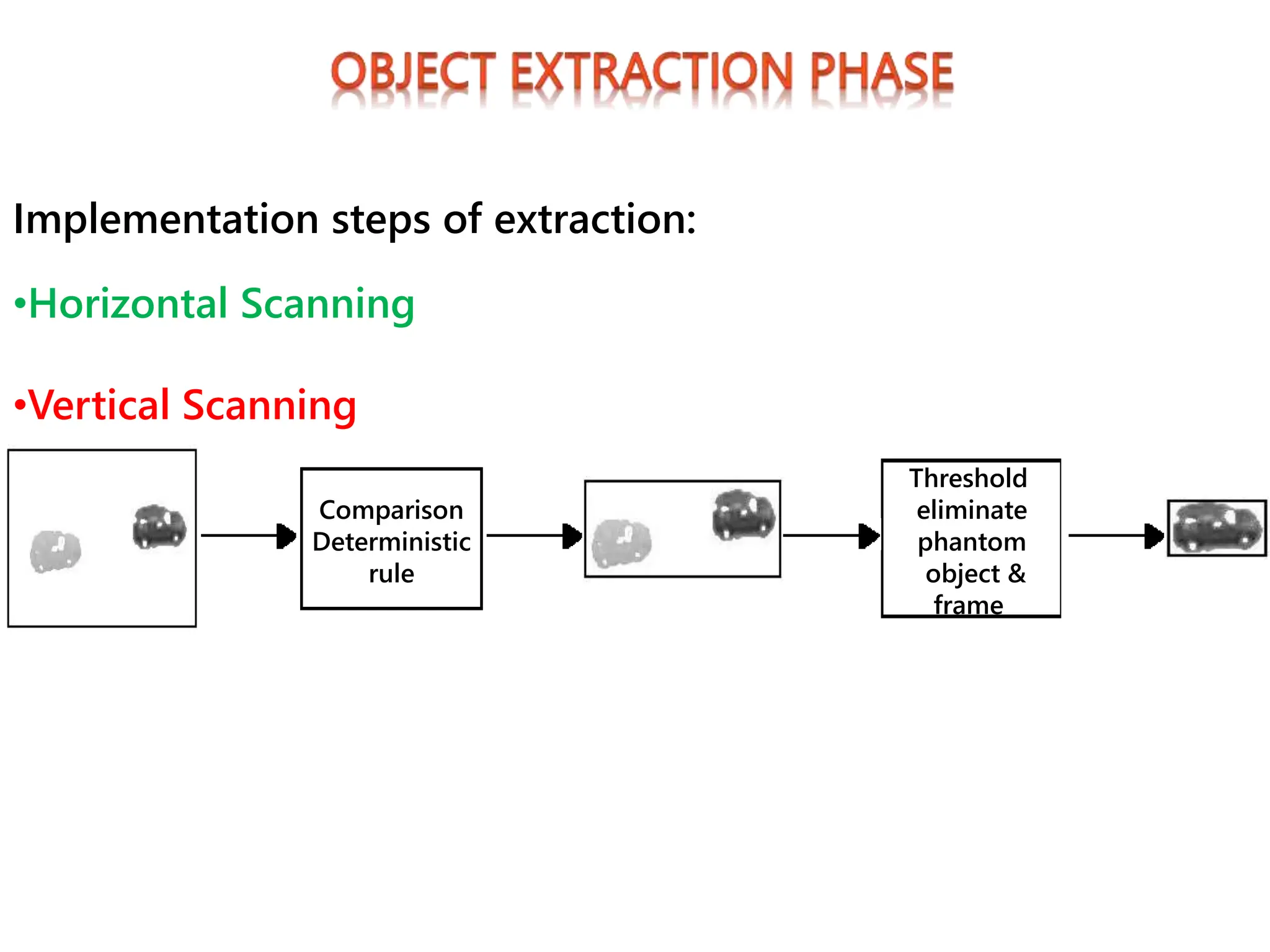
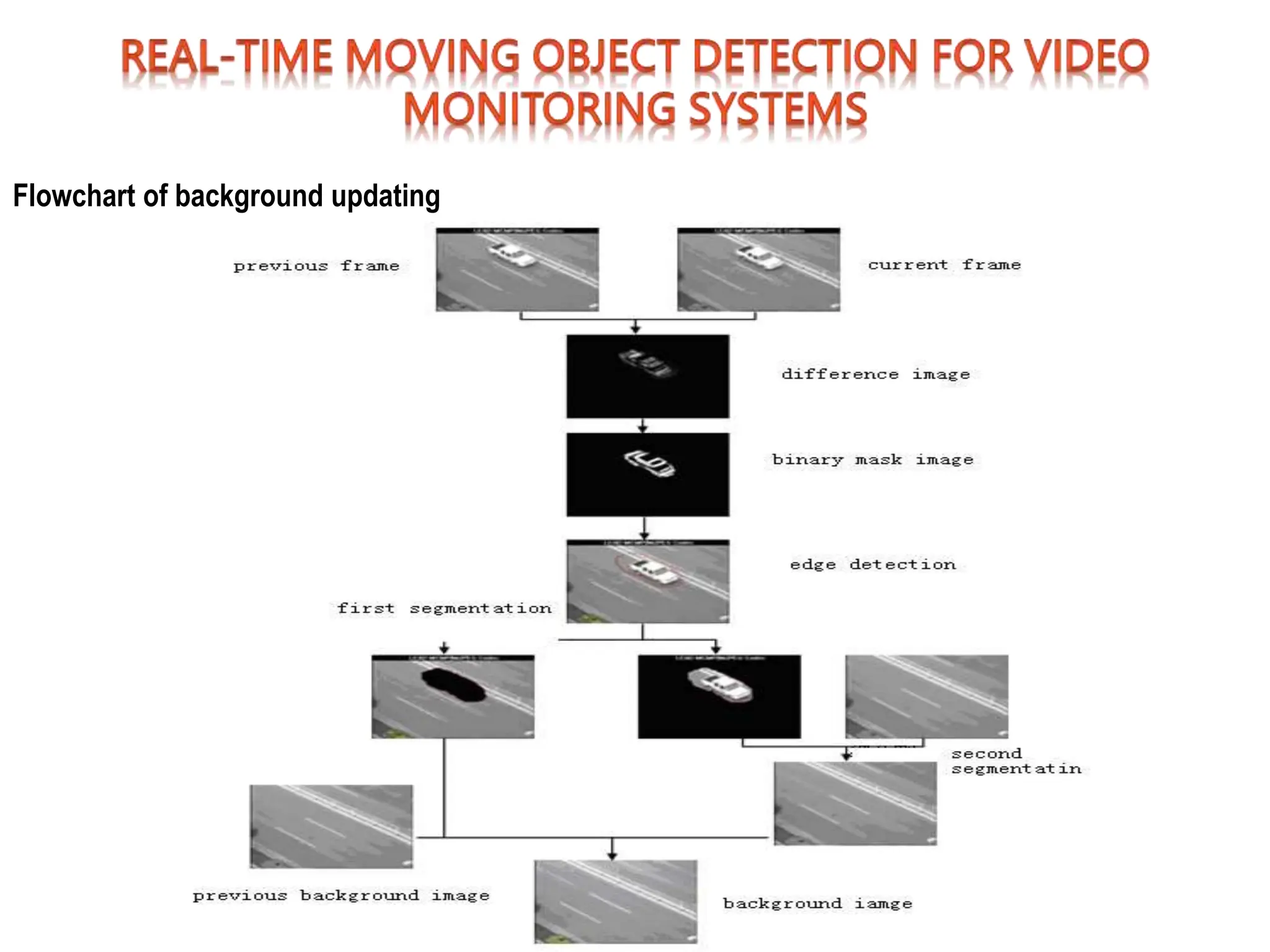
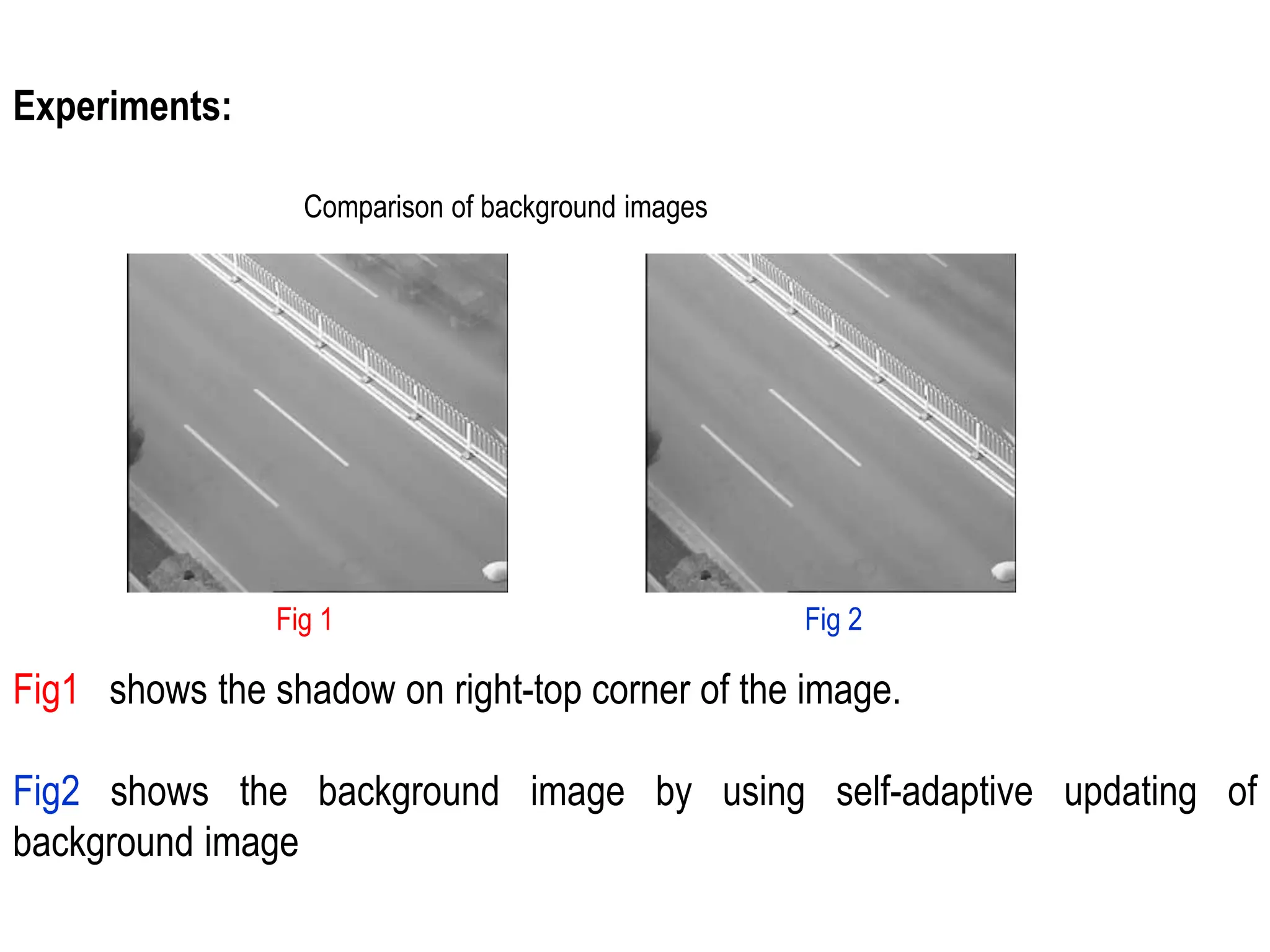
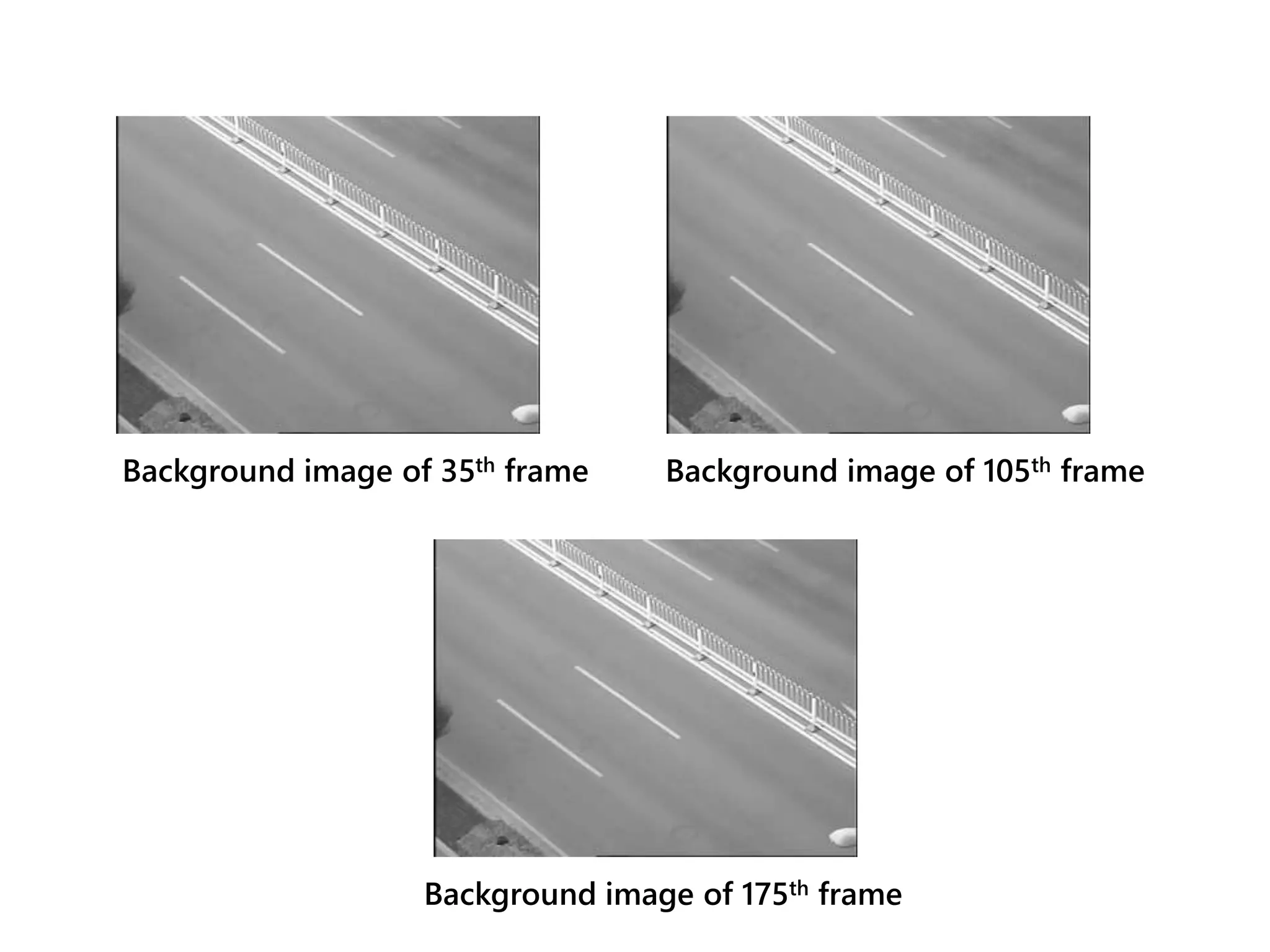
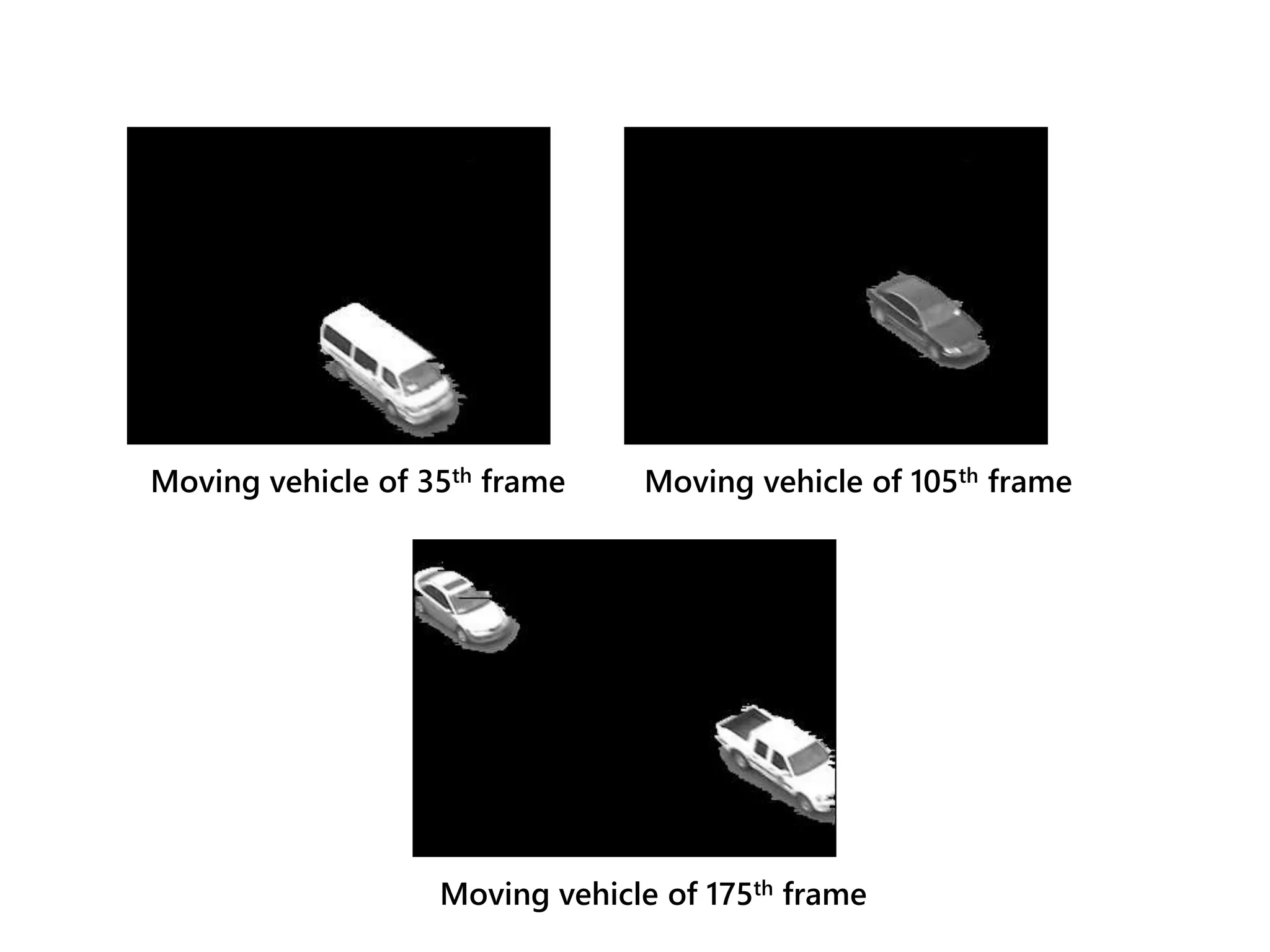
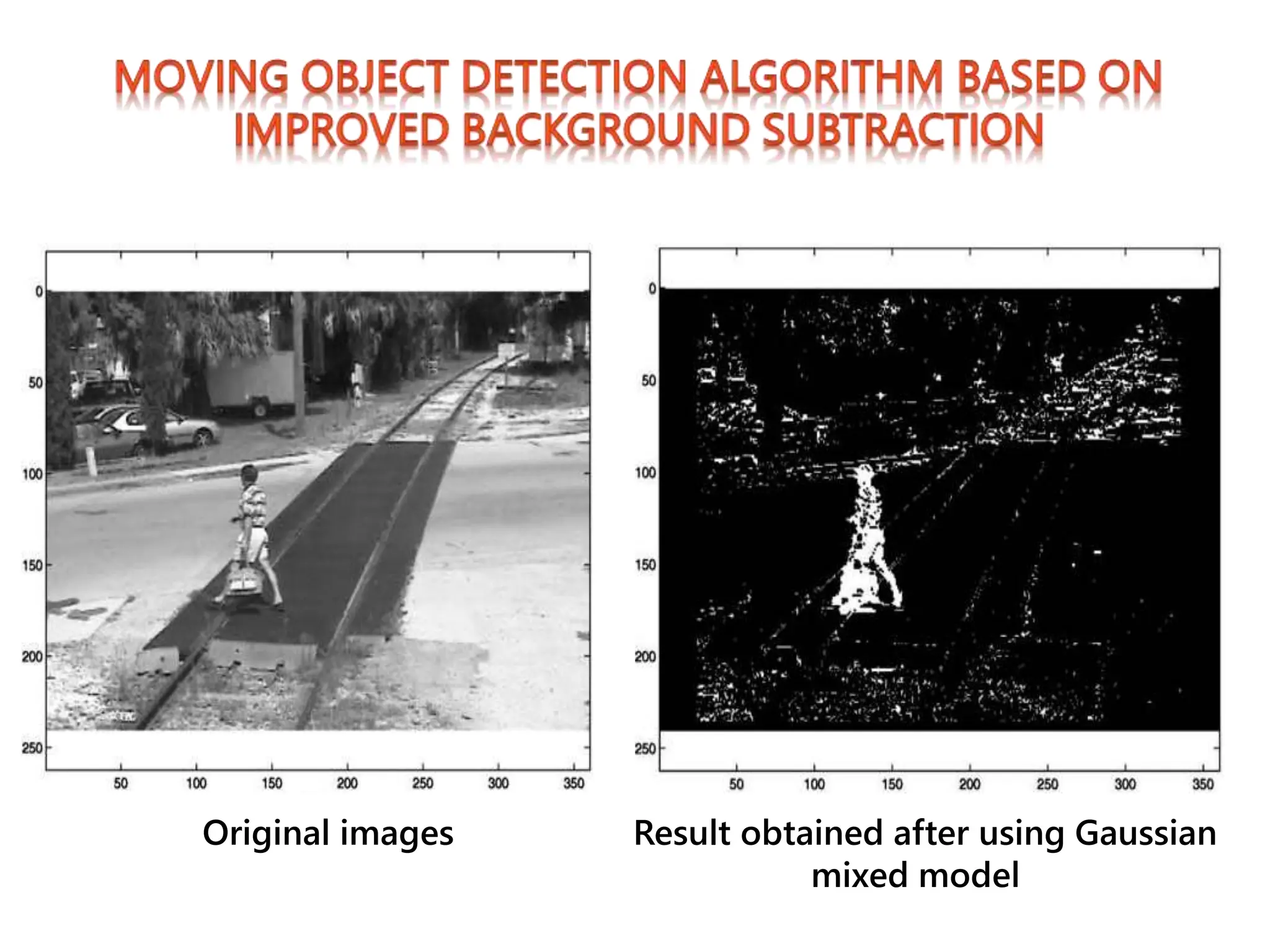
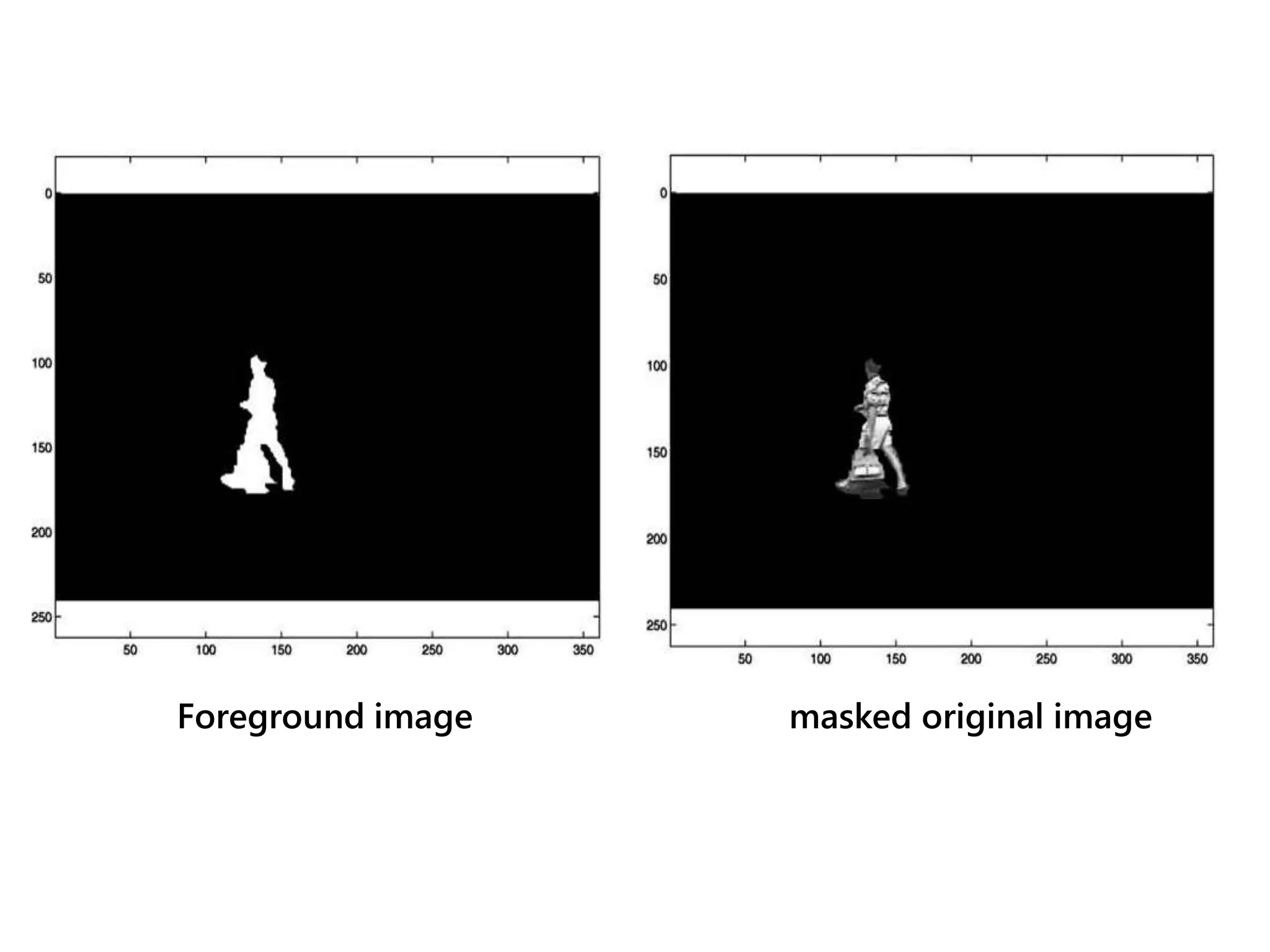
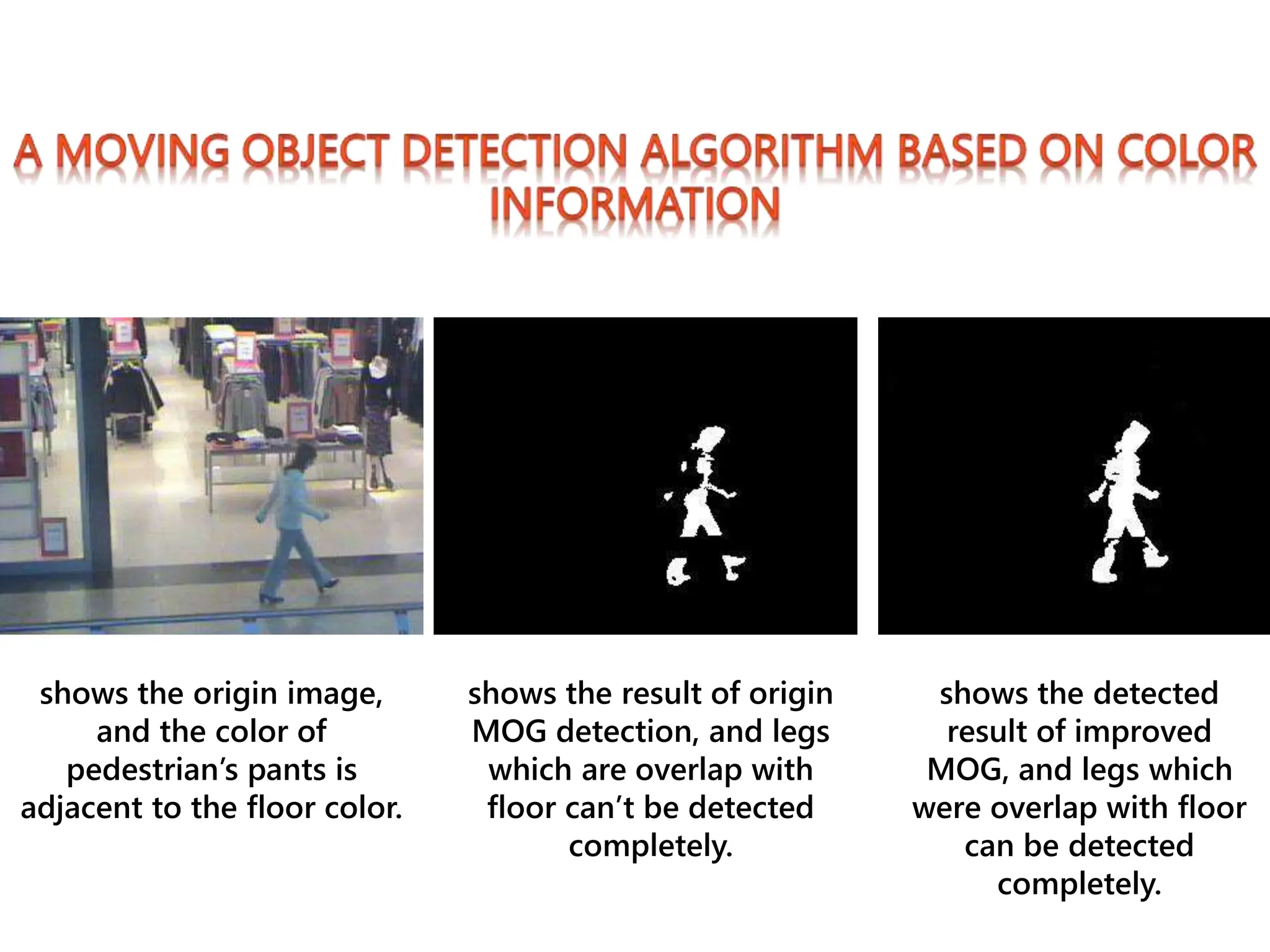
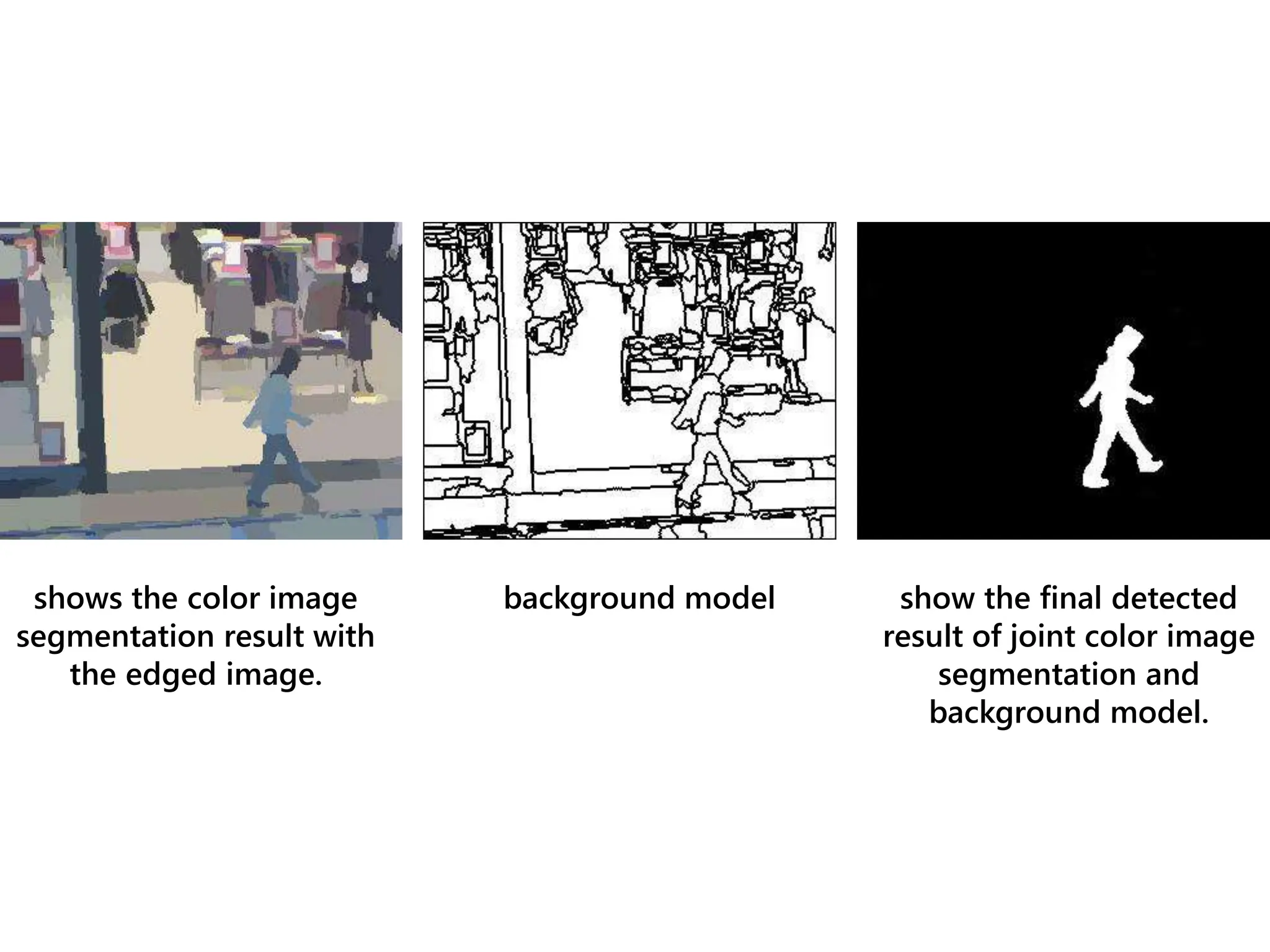
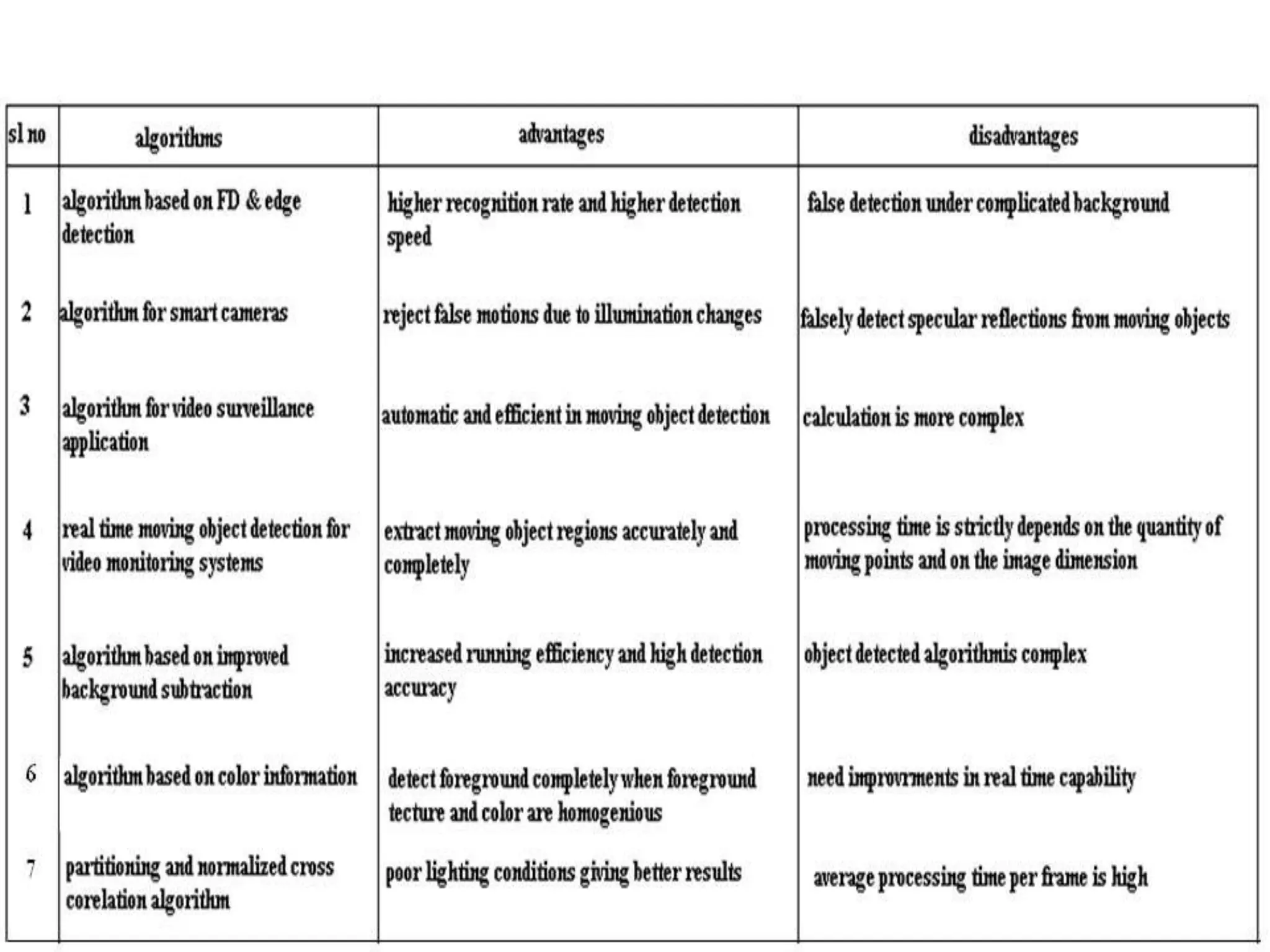
3. Moving object detection algorithms discussed include background subtraction, frame differencing, and edge detection. Advantages and disadvantages of these algorithms are also presented.