Downloaded 26 times

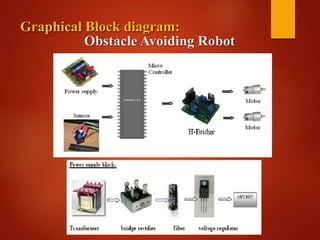
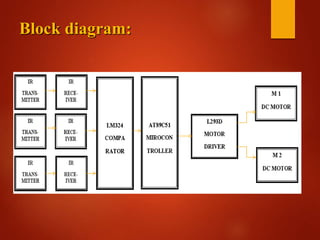
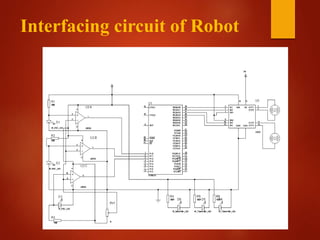
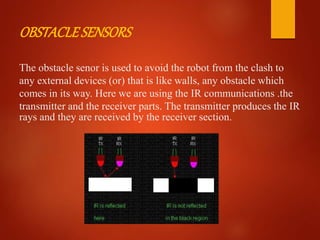
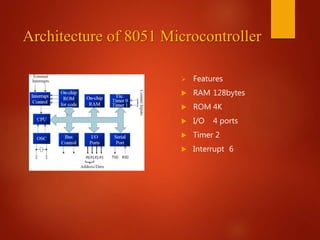
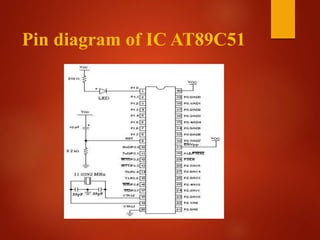

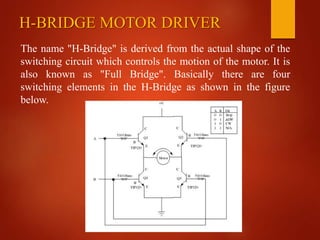


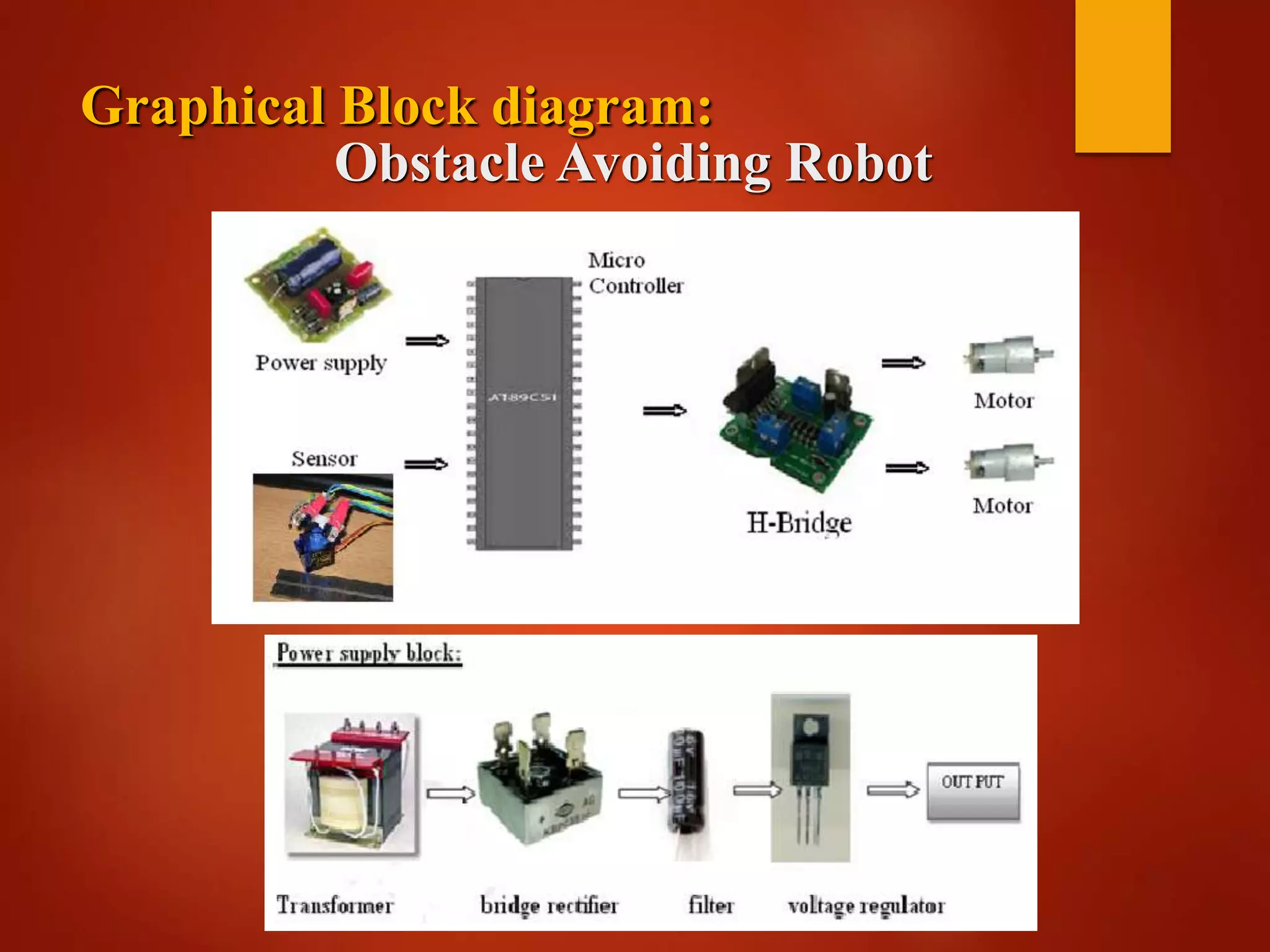
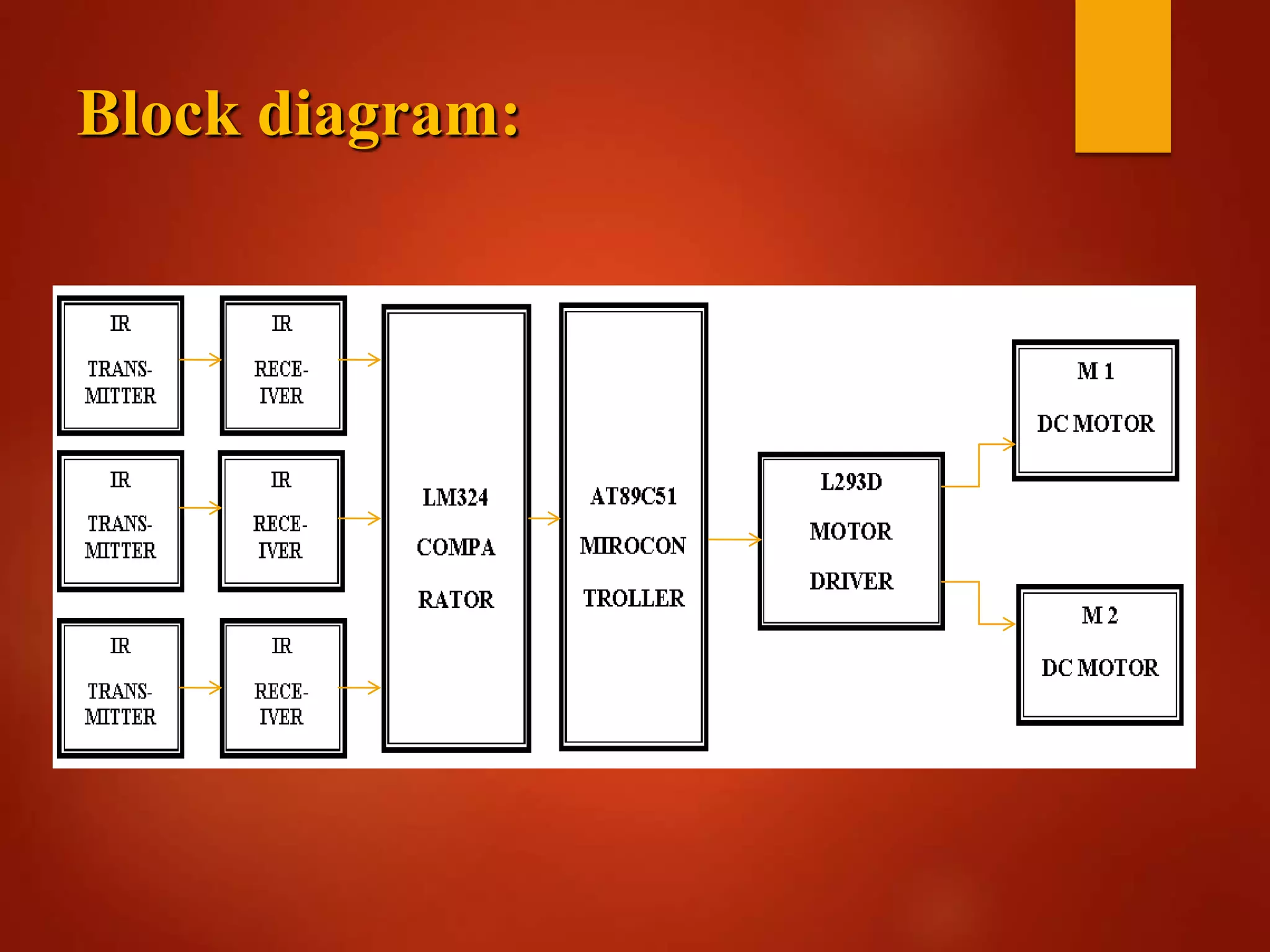
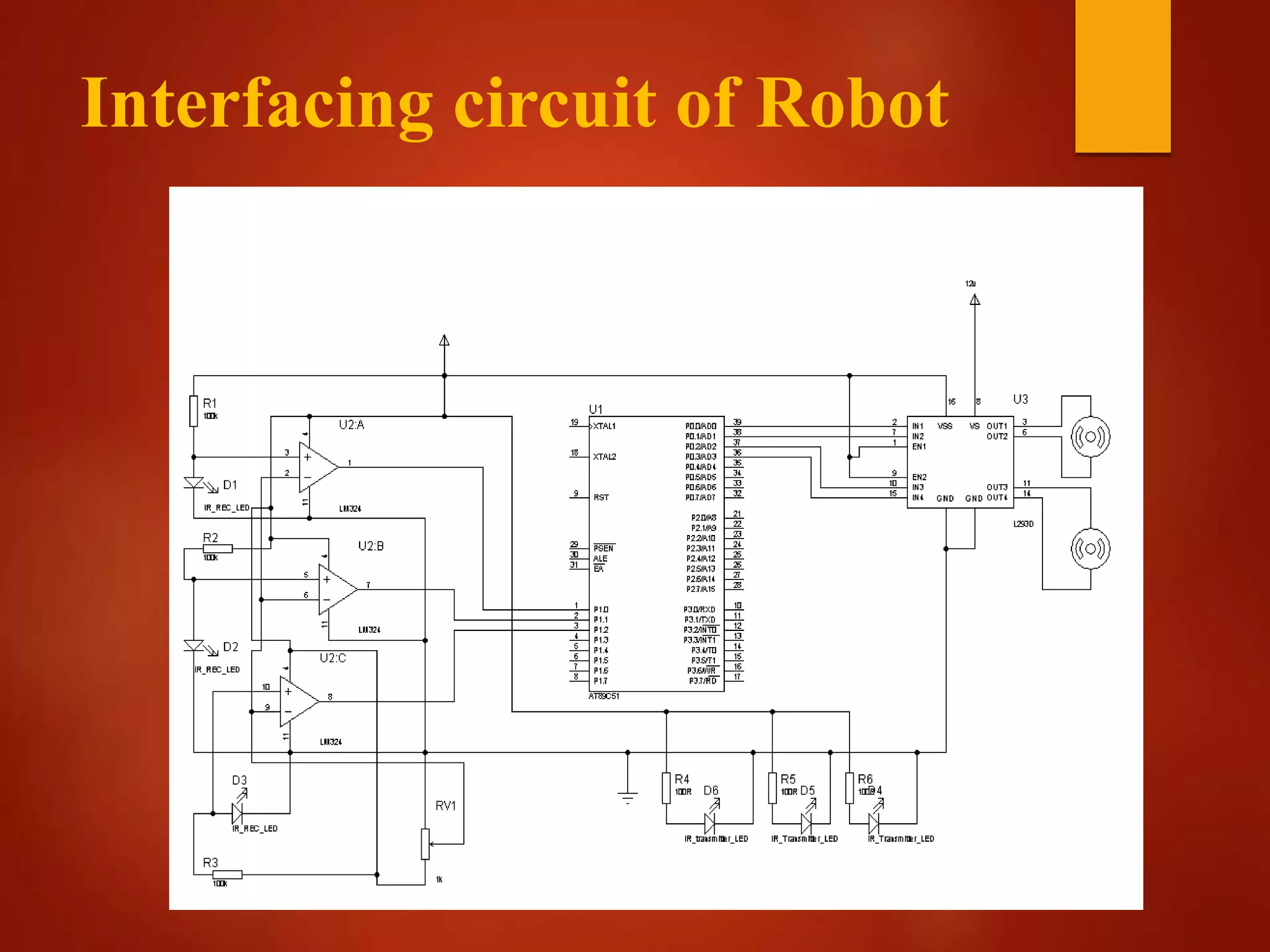
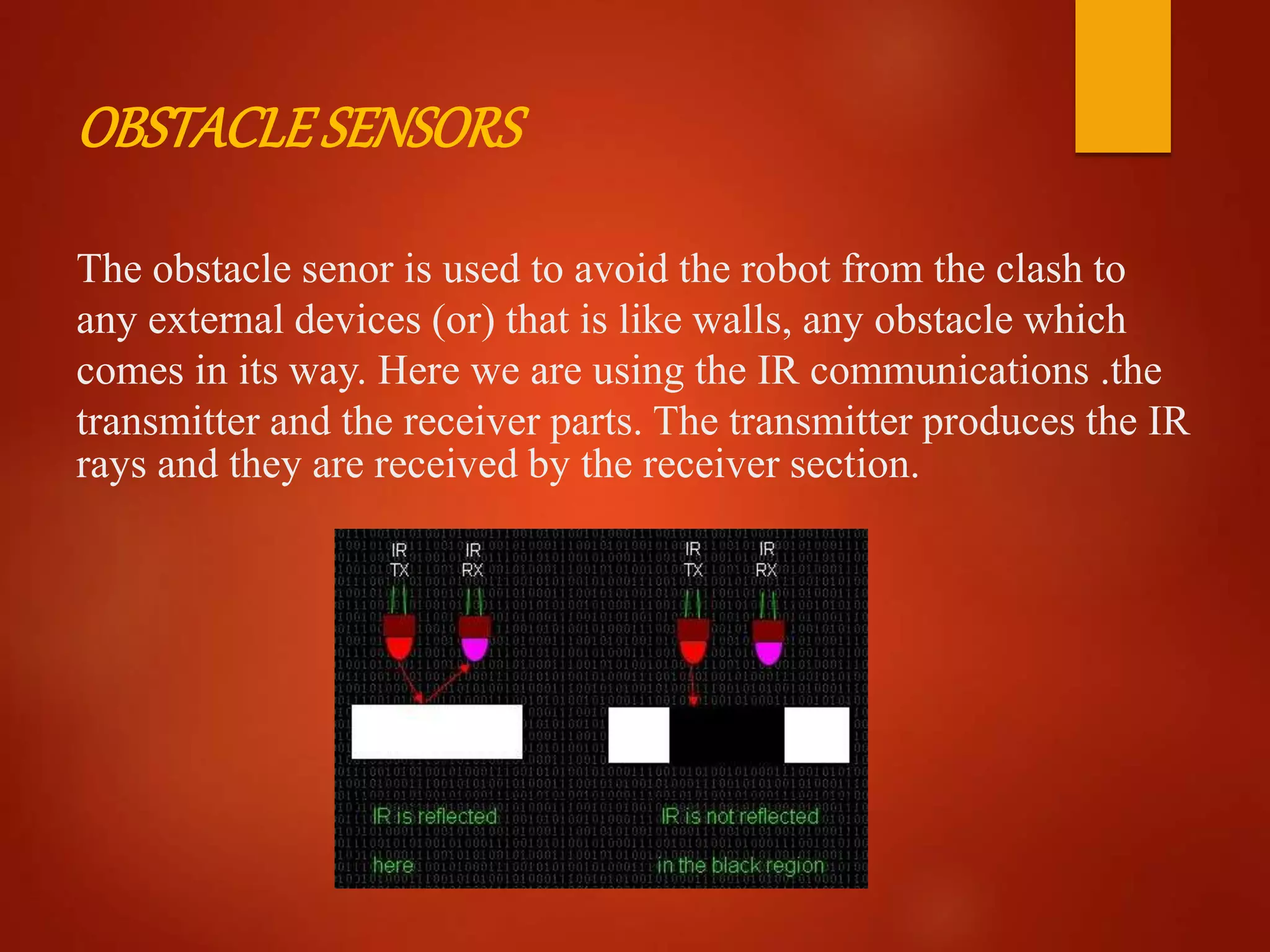
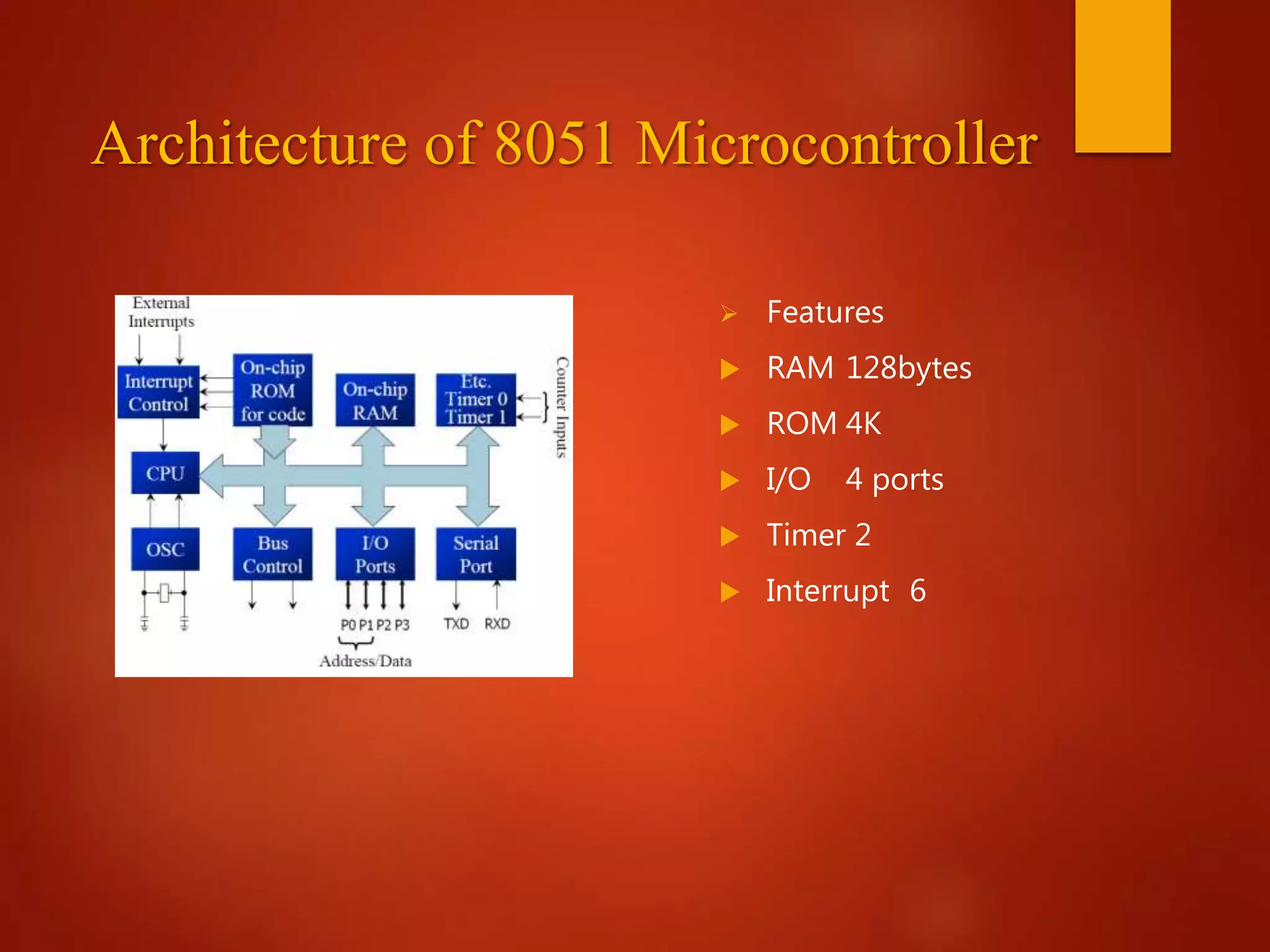
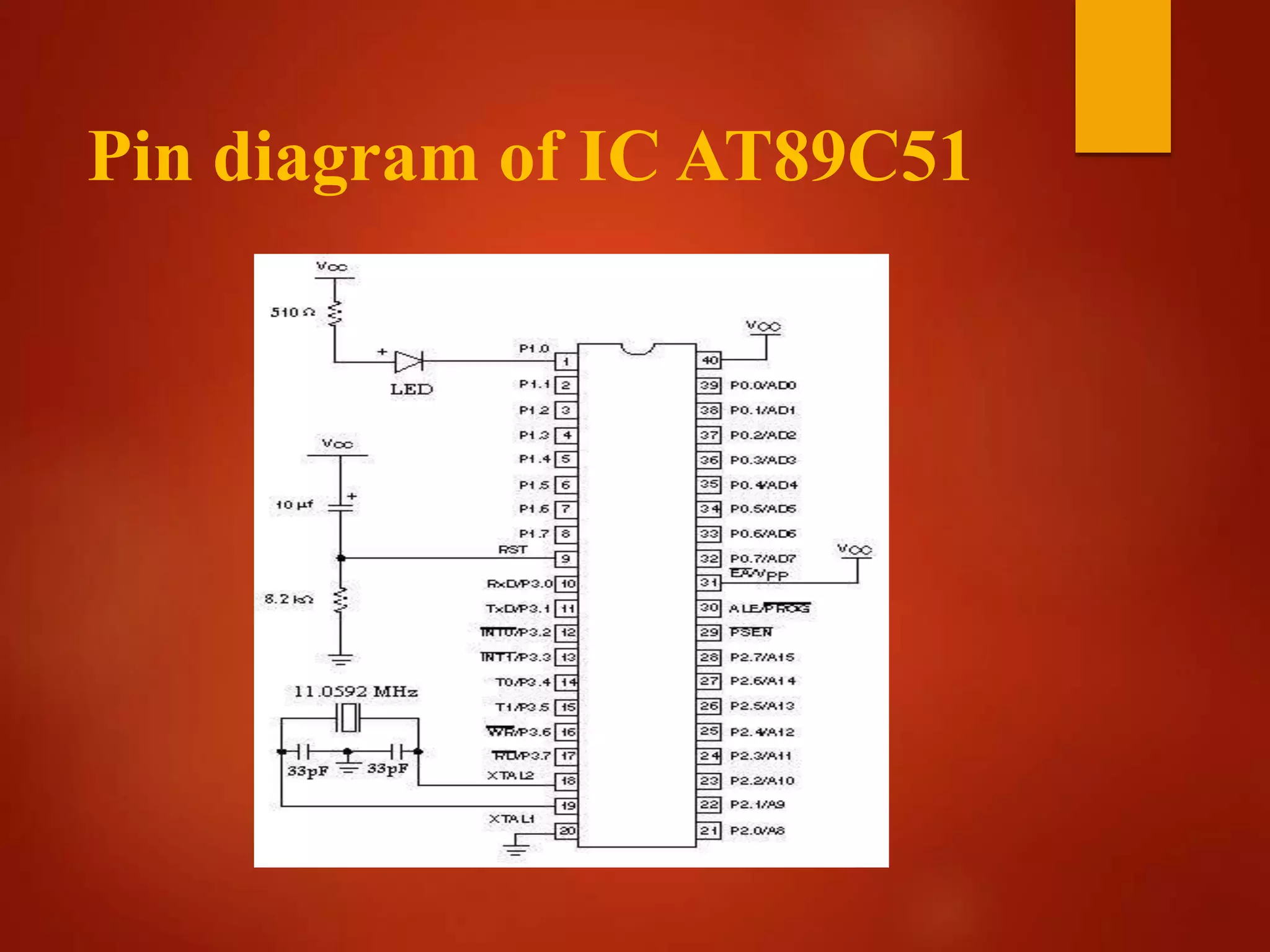

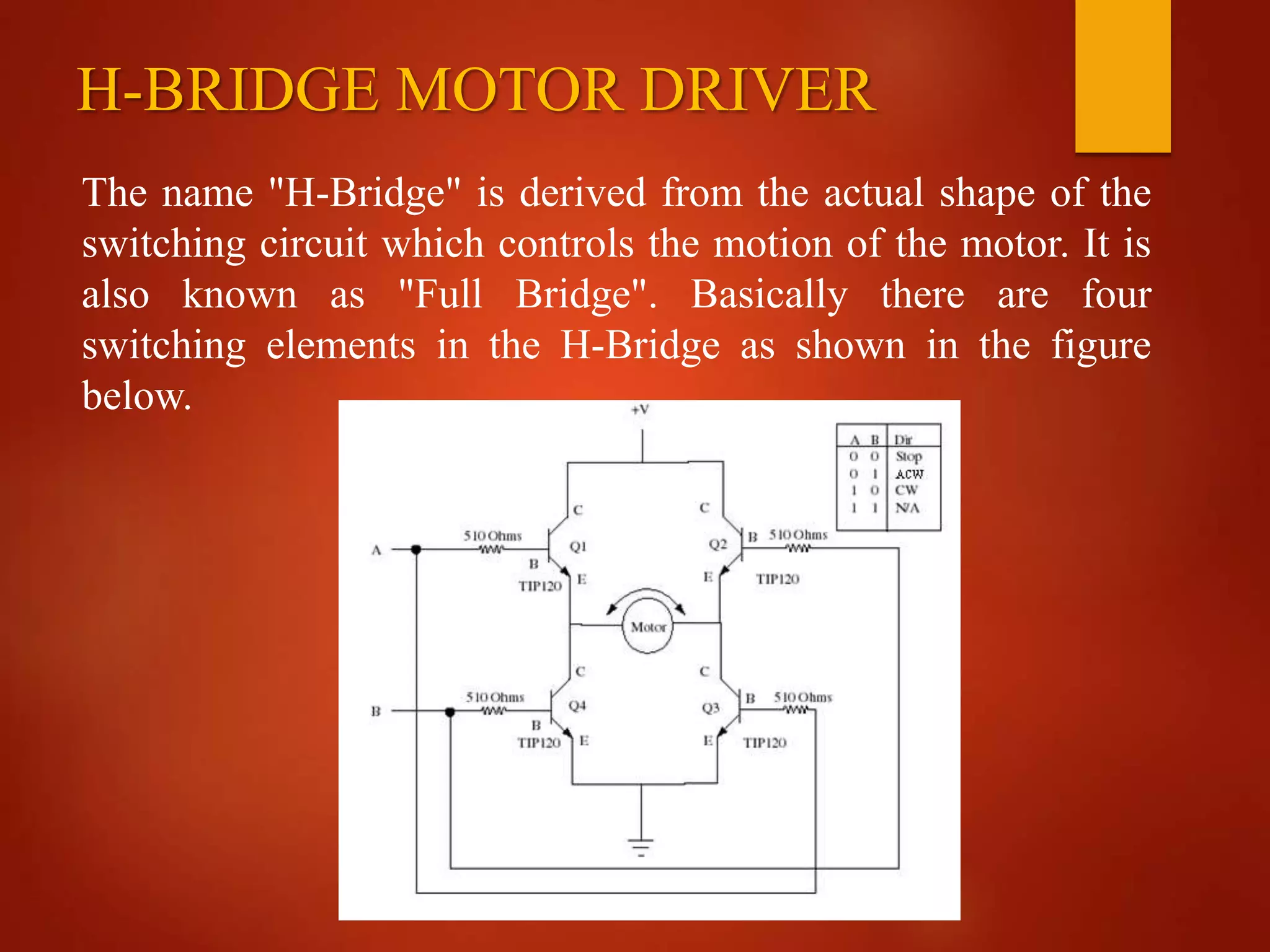
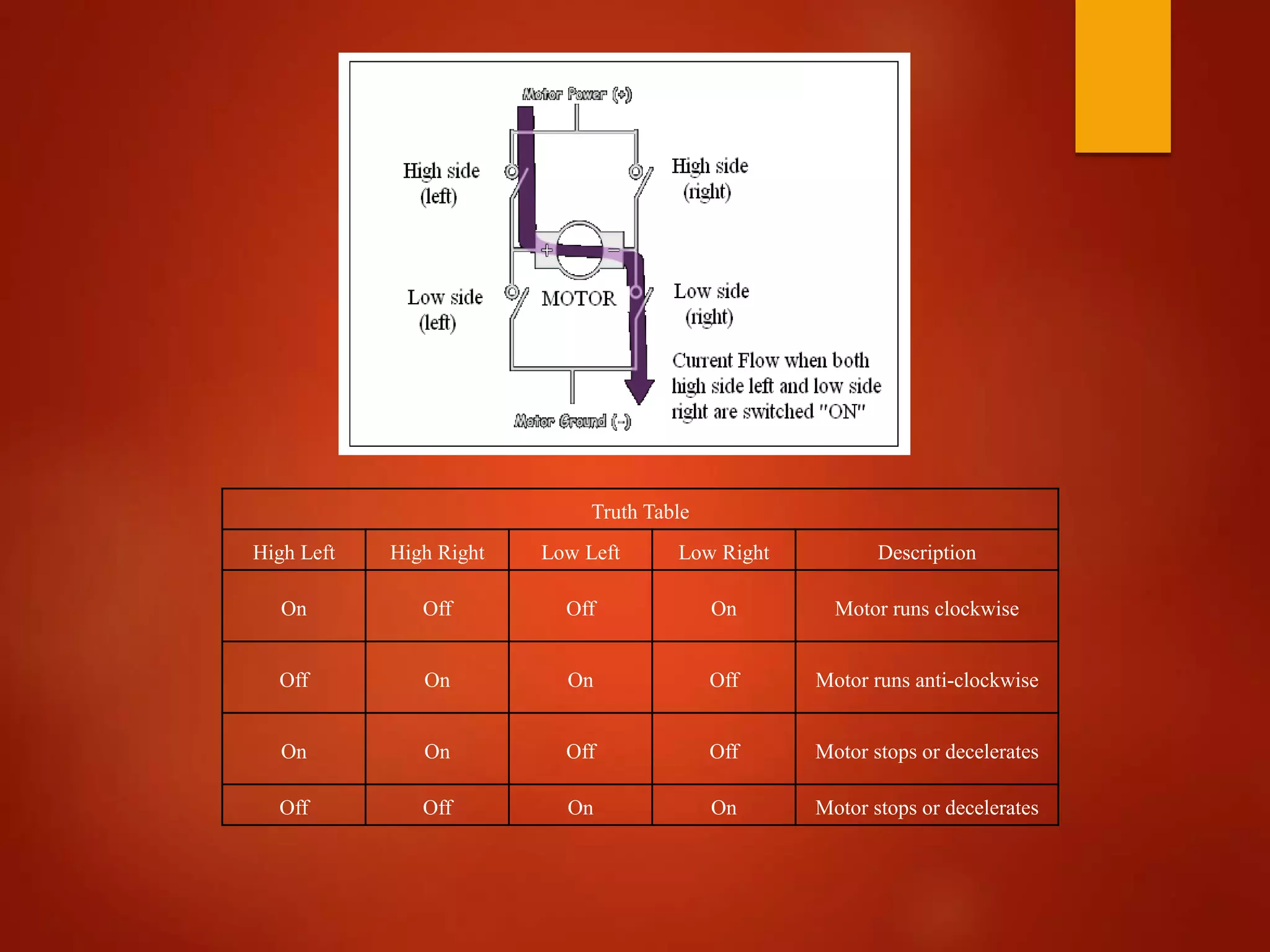
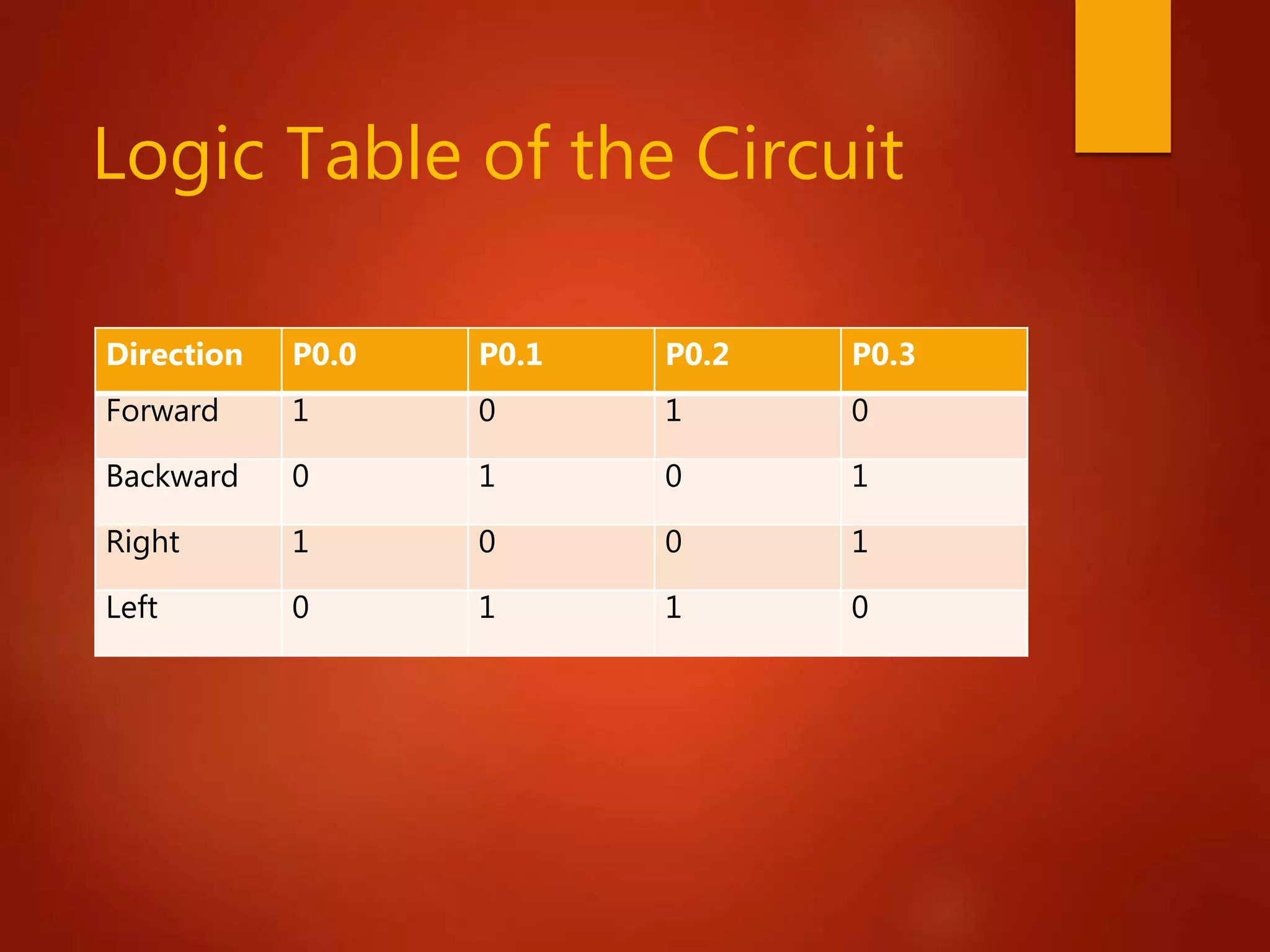
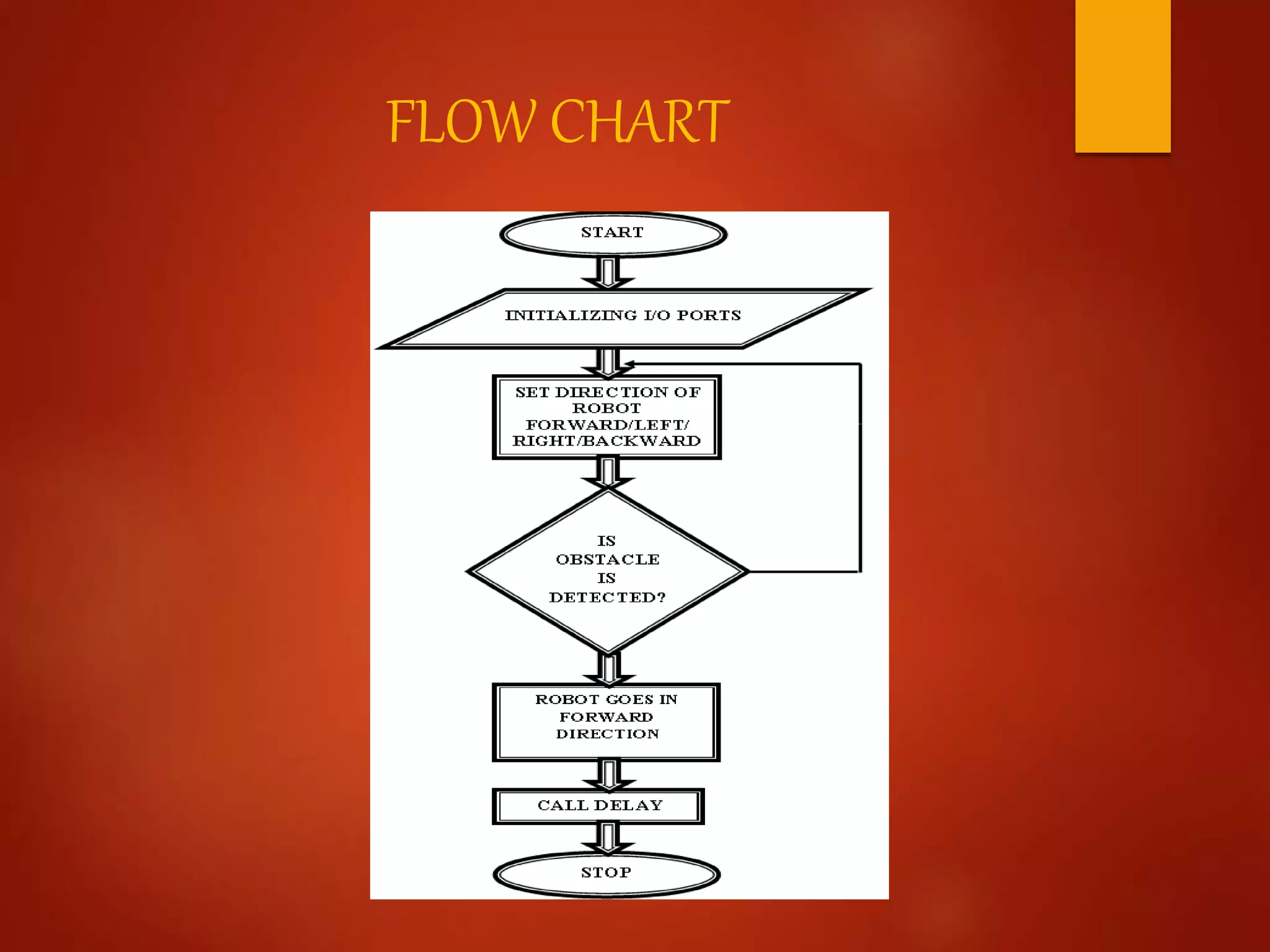
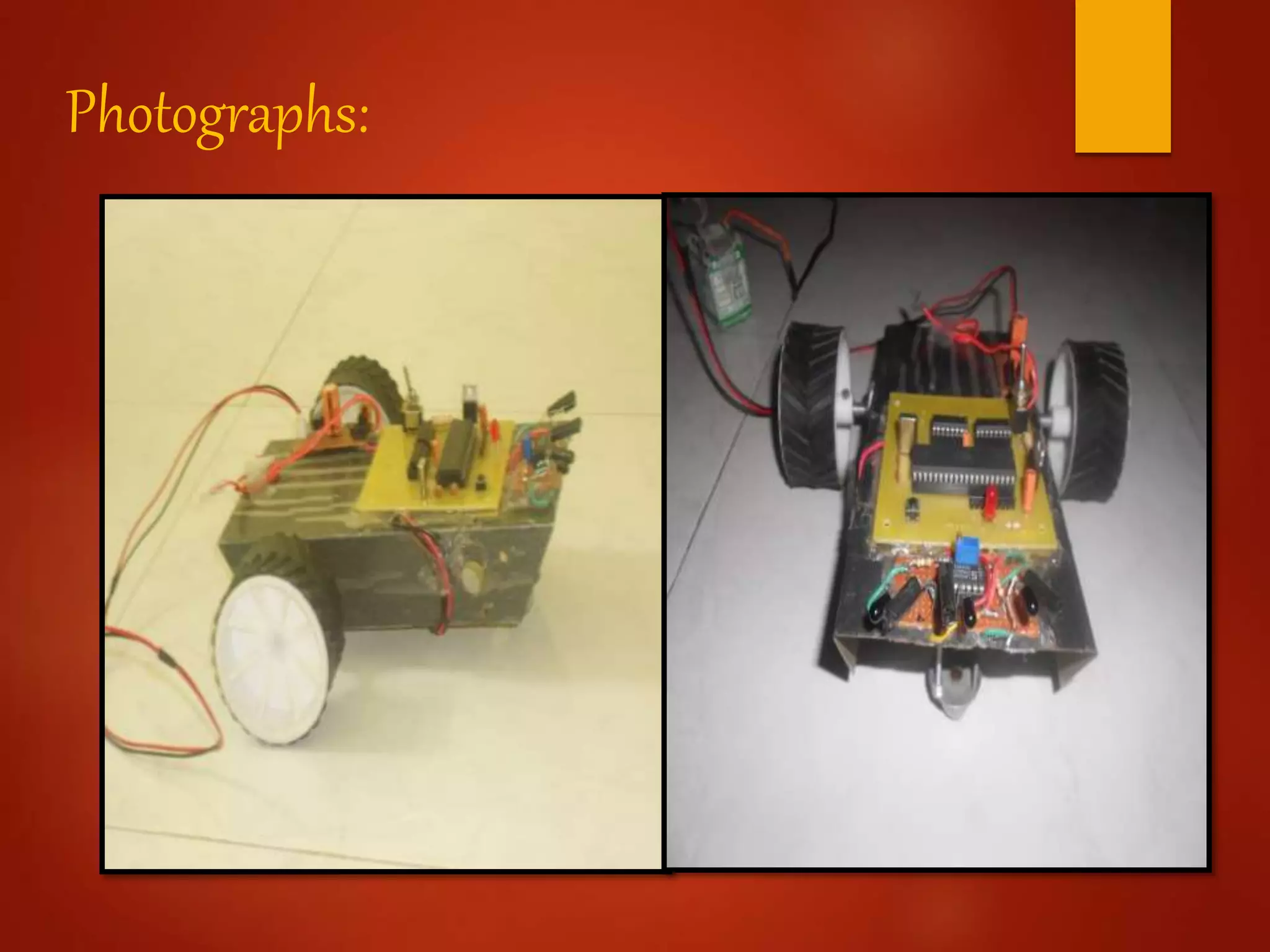


The document discusses an obstacle-avoiding robot that uses infrared sensors for detecting obstacles and navigating autonomously. It details the architecture of the 8051 microcontroller, the working of an H-bridge motor driver for controlling motor direction, and provides an algorithm for robot operation. Additionally, it outlines the advantages and disadvantages of the robot's design and potential applications in various fields, including toys and military use.
![Interfacing technique with 8085- ADC[0808]](https://cdn.slidesharecdn.com/ss_thumbnails/adc-160307140900-thumbnail.jpg?width=600ounds&width=560&fit=bounds)











































































