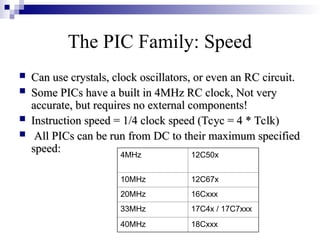
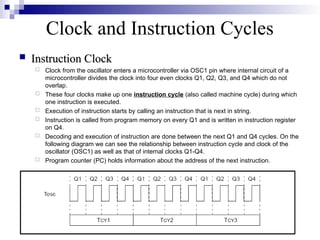
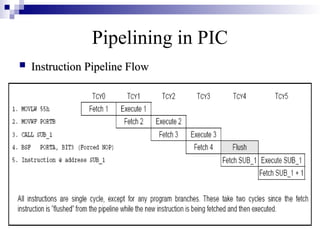
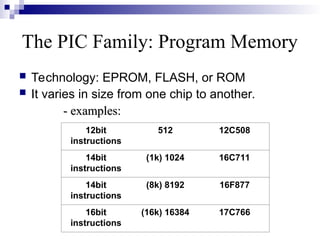
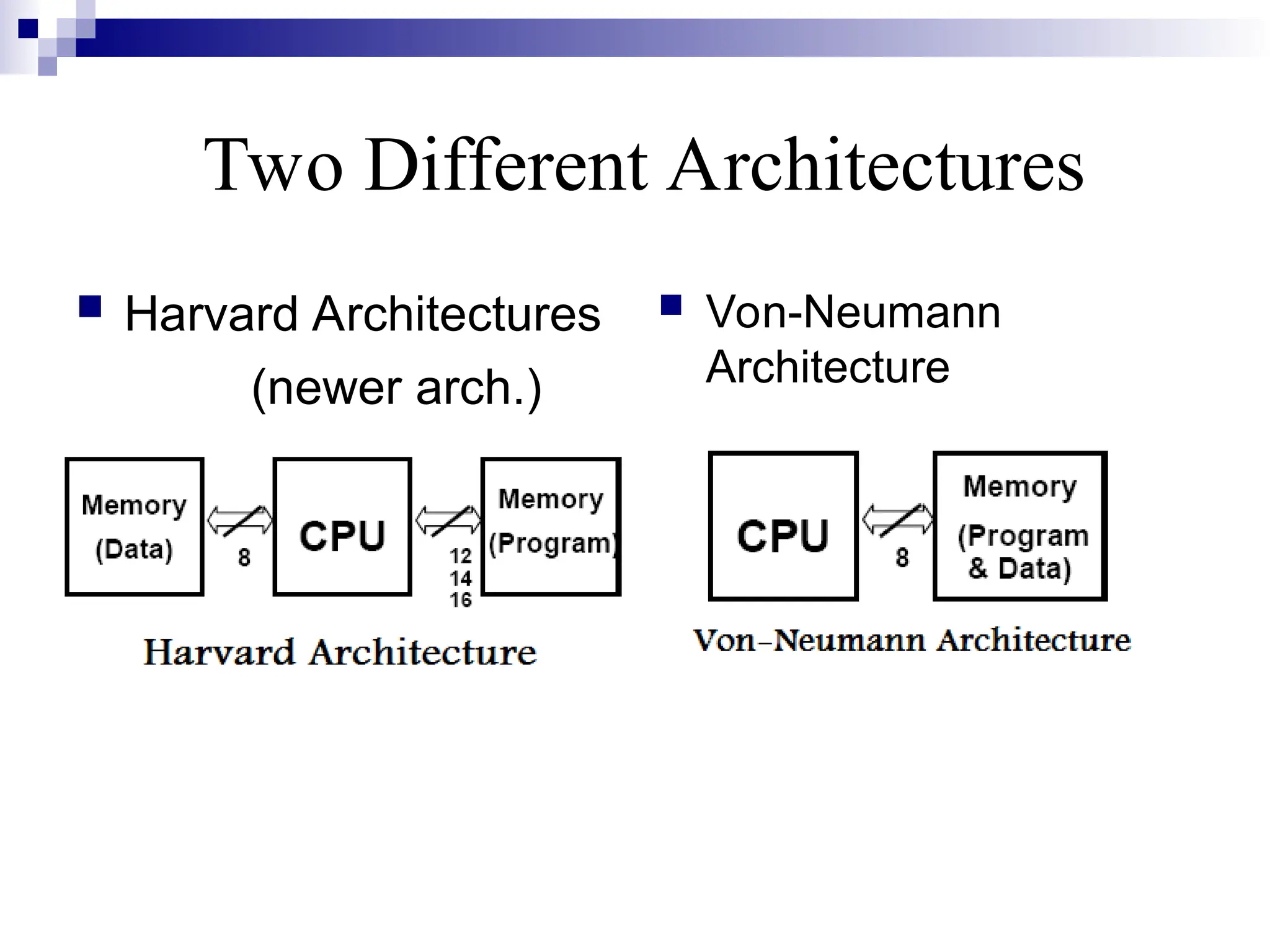
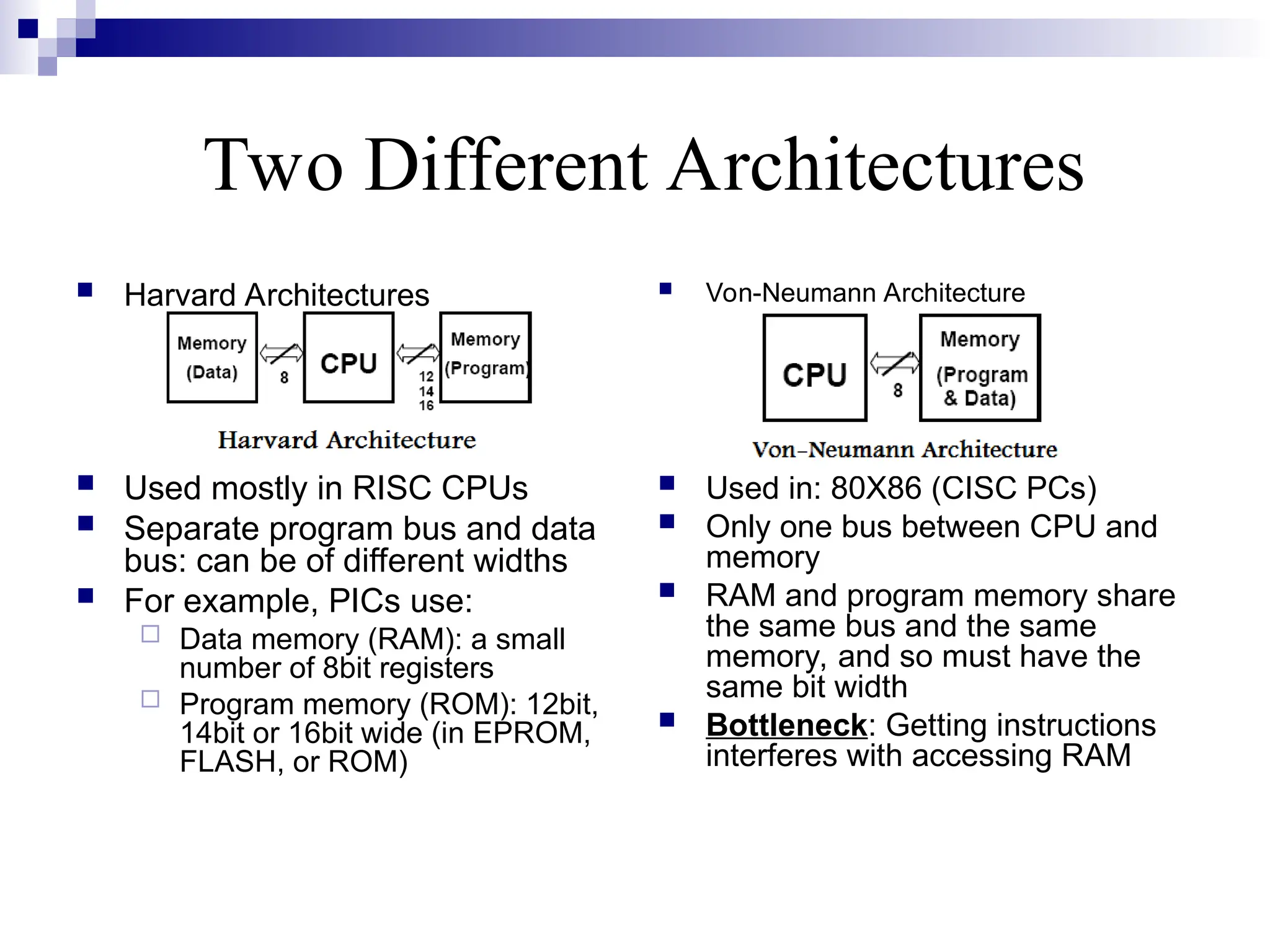
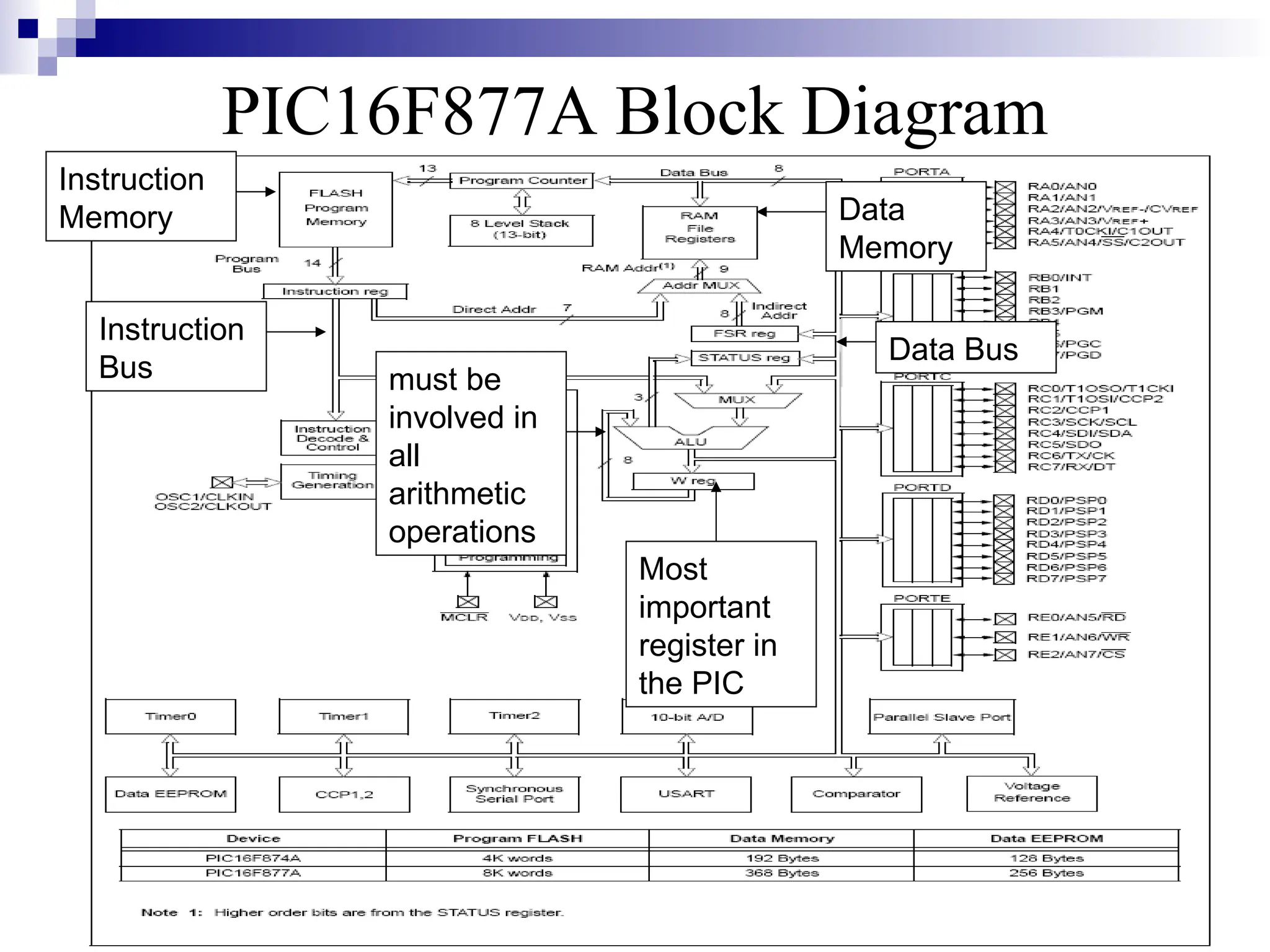
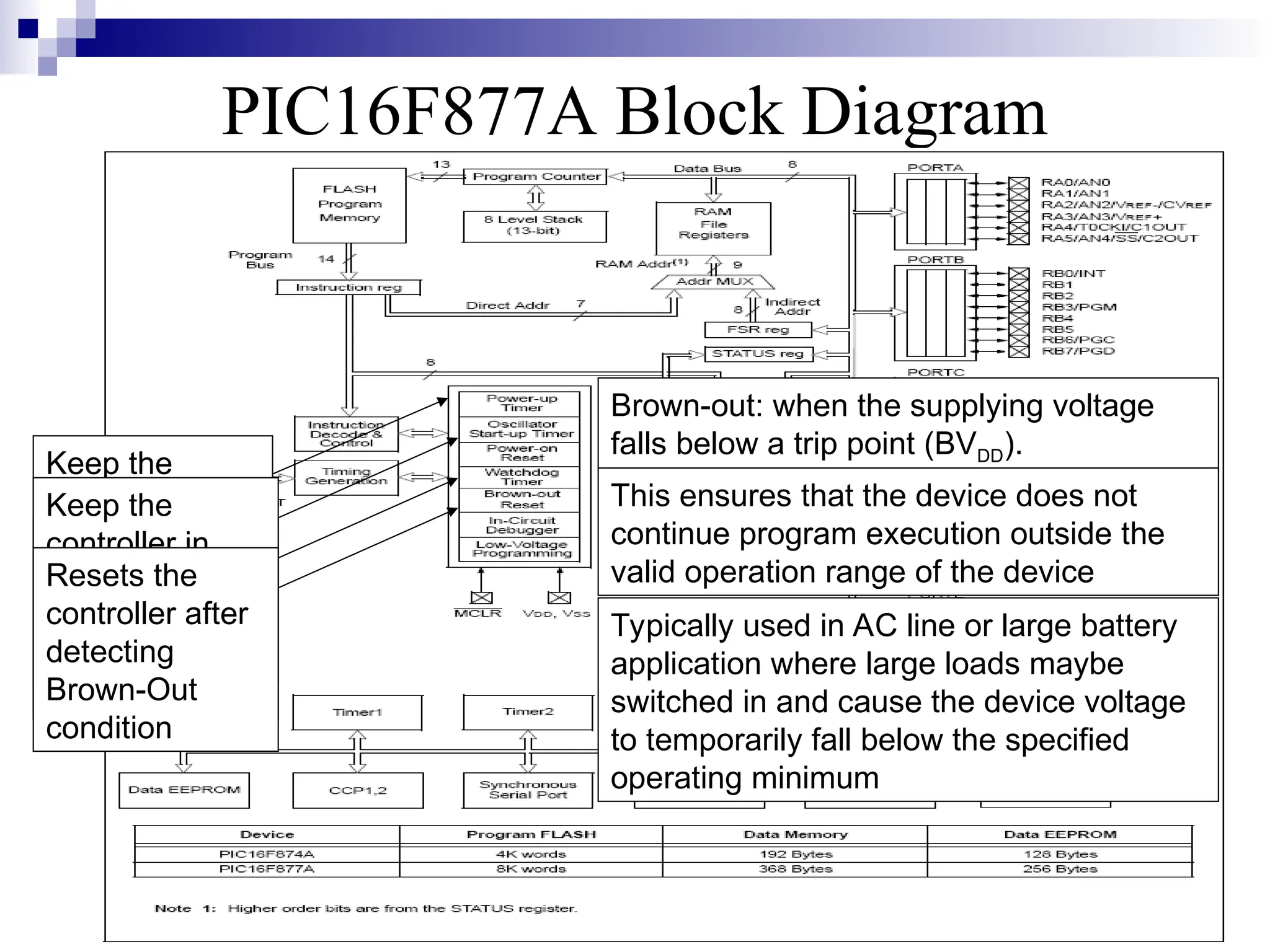
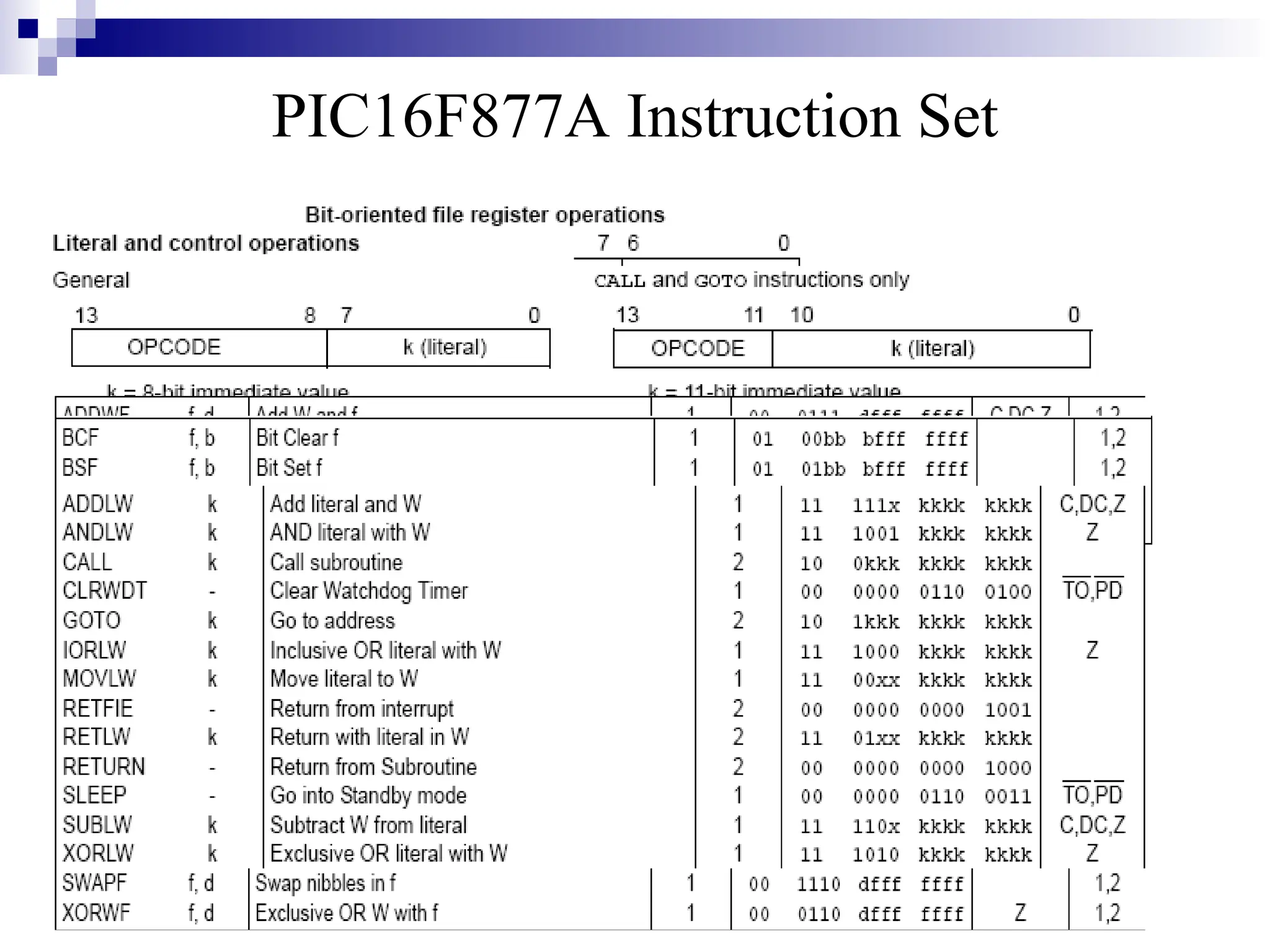
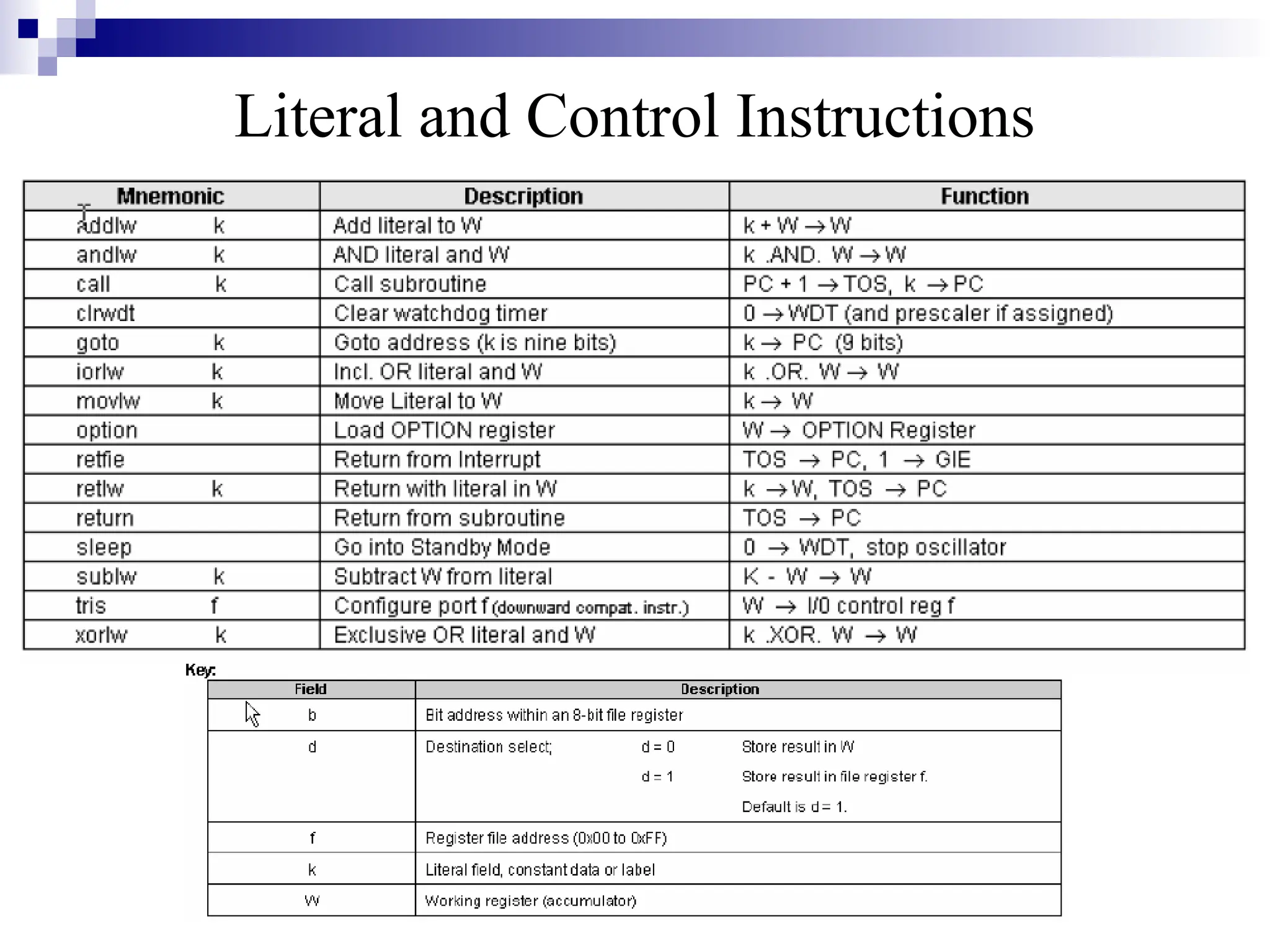
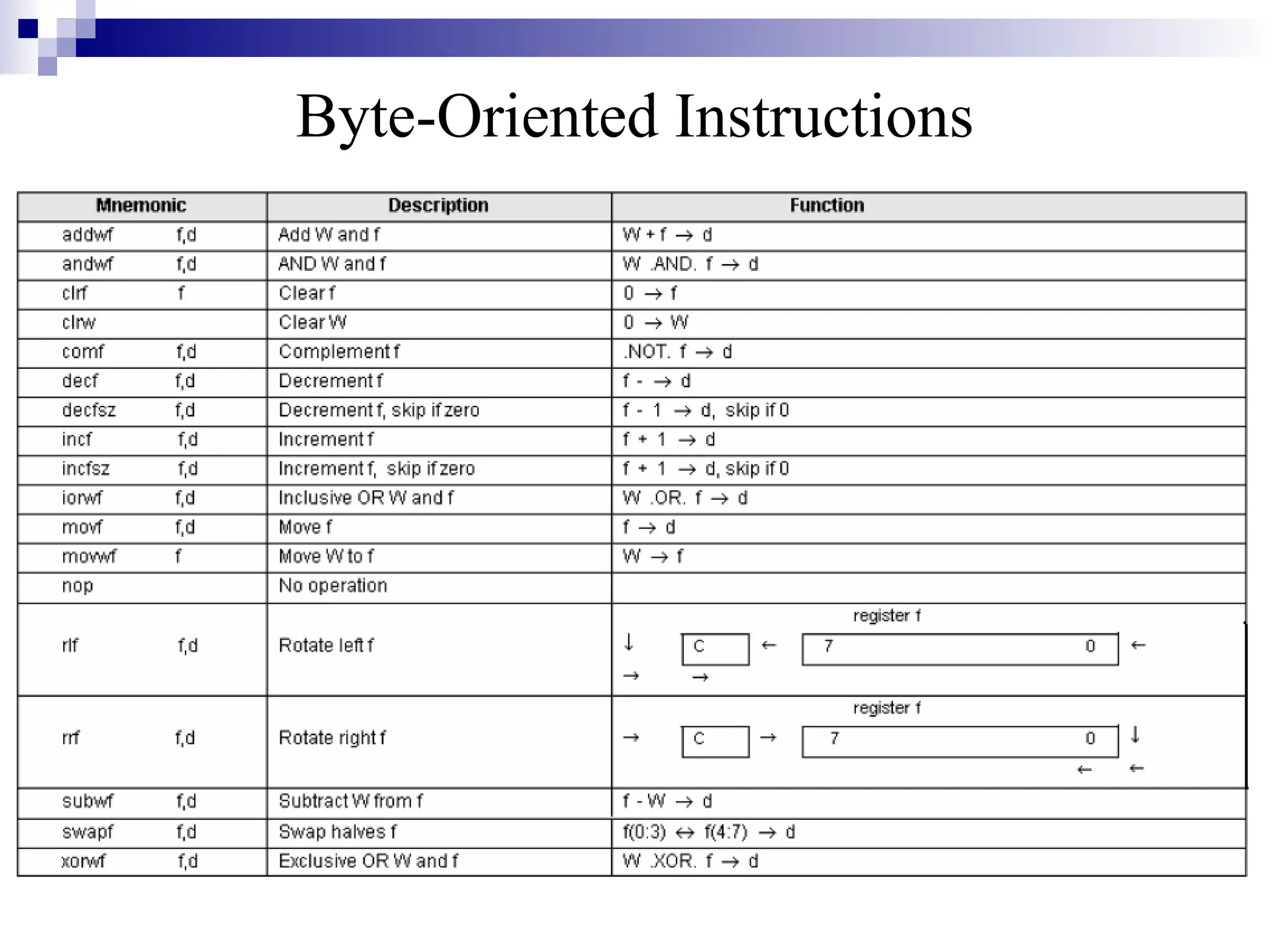
The document provides an introduction to PIC microcontrollers, specifically focusing on the PIC16F877A model, its architectures, features, and applications. It discusses the advantages of PIC microcontrollers, such as low cost, efficient code, and ease of implementation, as well as their memory types and instruction sets. Additionally, the document goes into detail about the programming procedures, internal architecture, and peripherals used in PIC microcontroller systems.