Download as PDF, PPTX




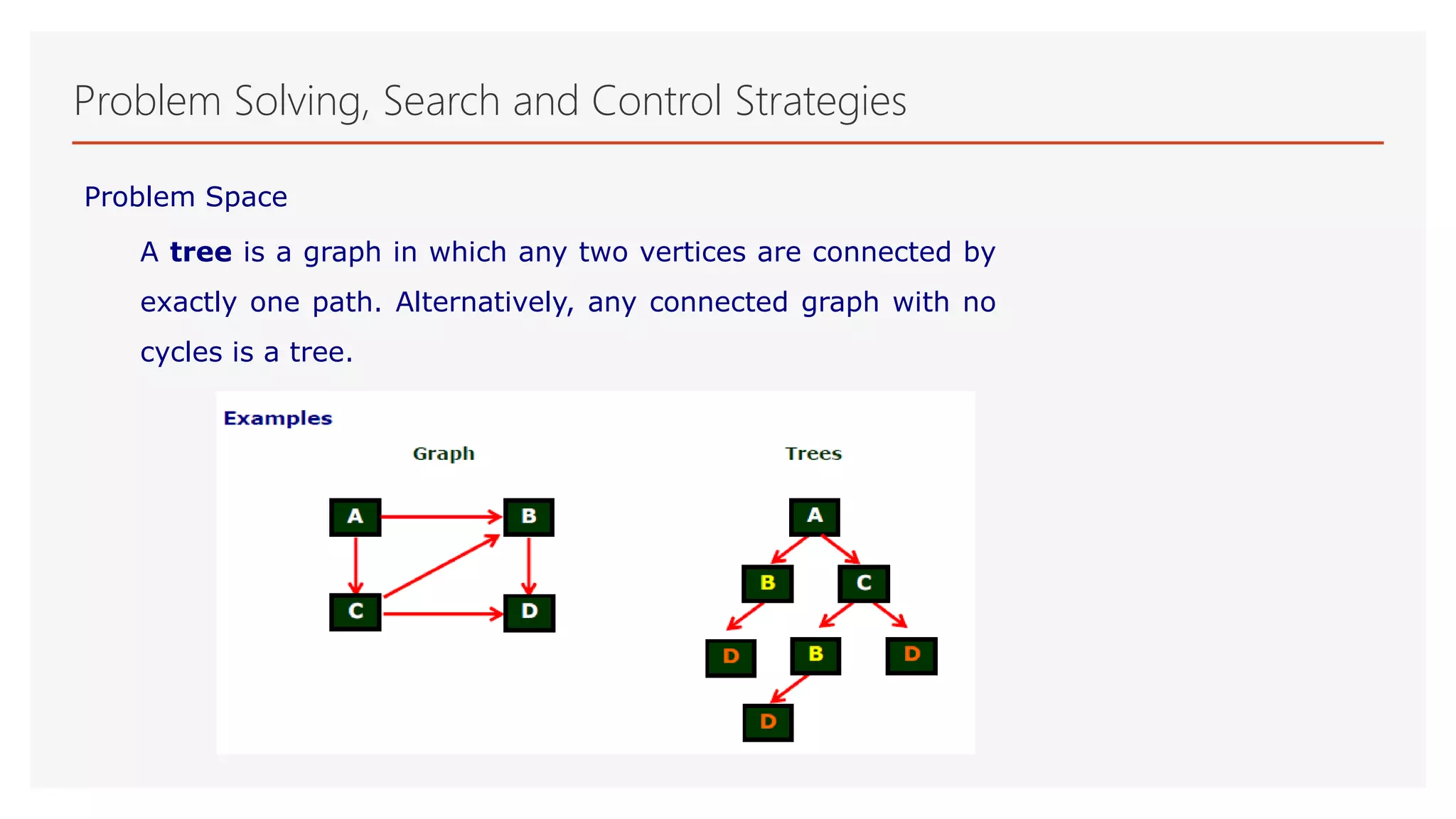


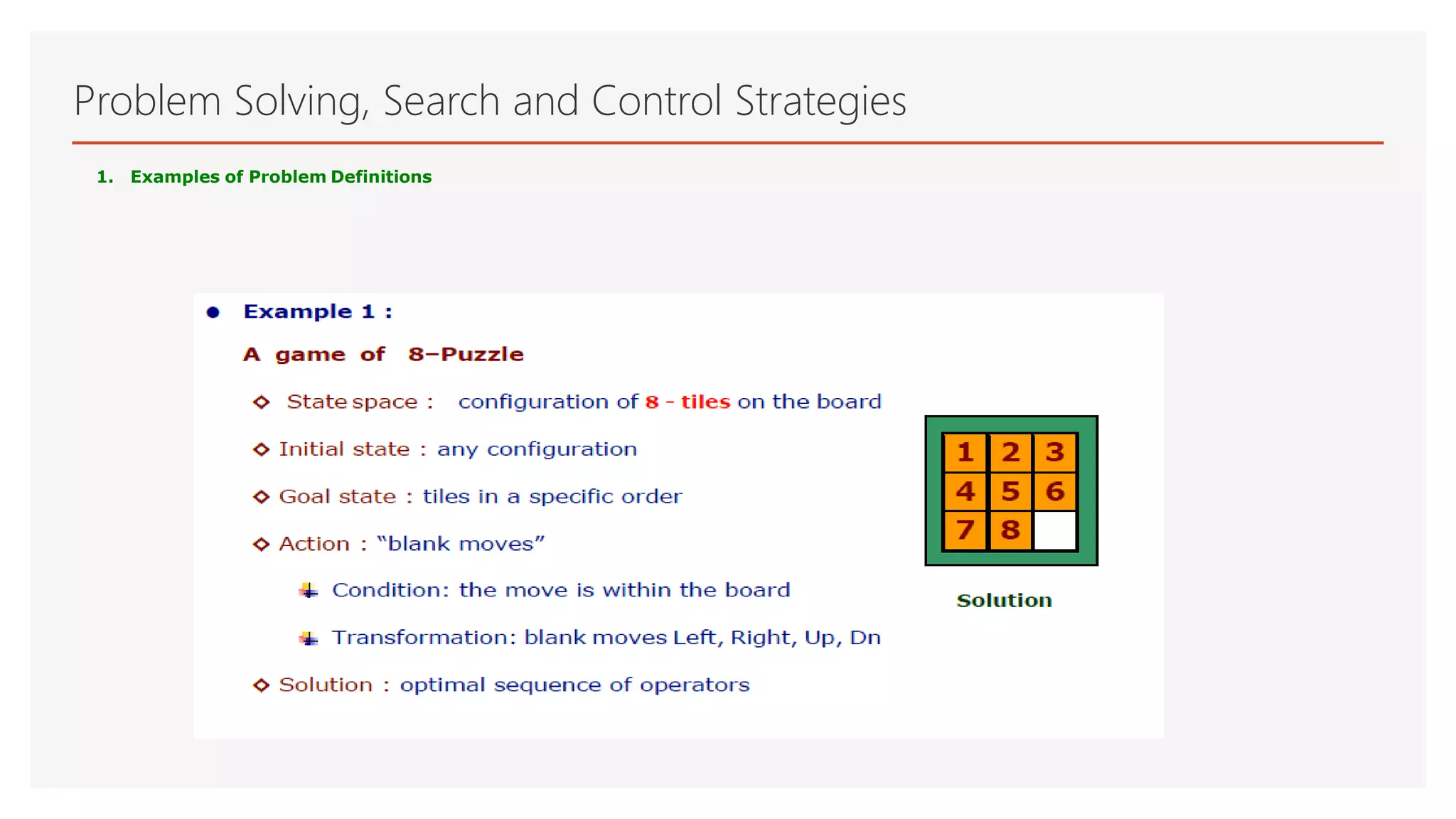
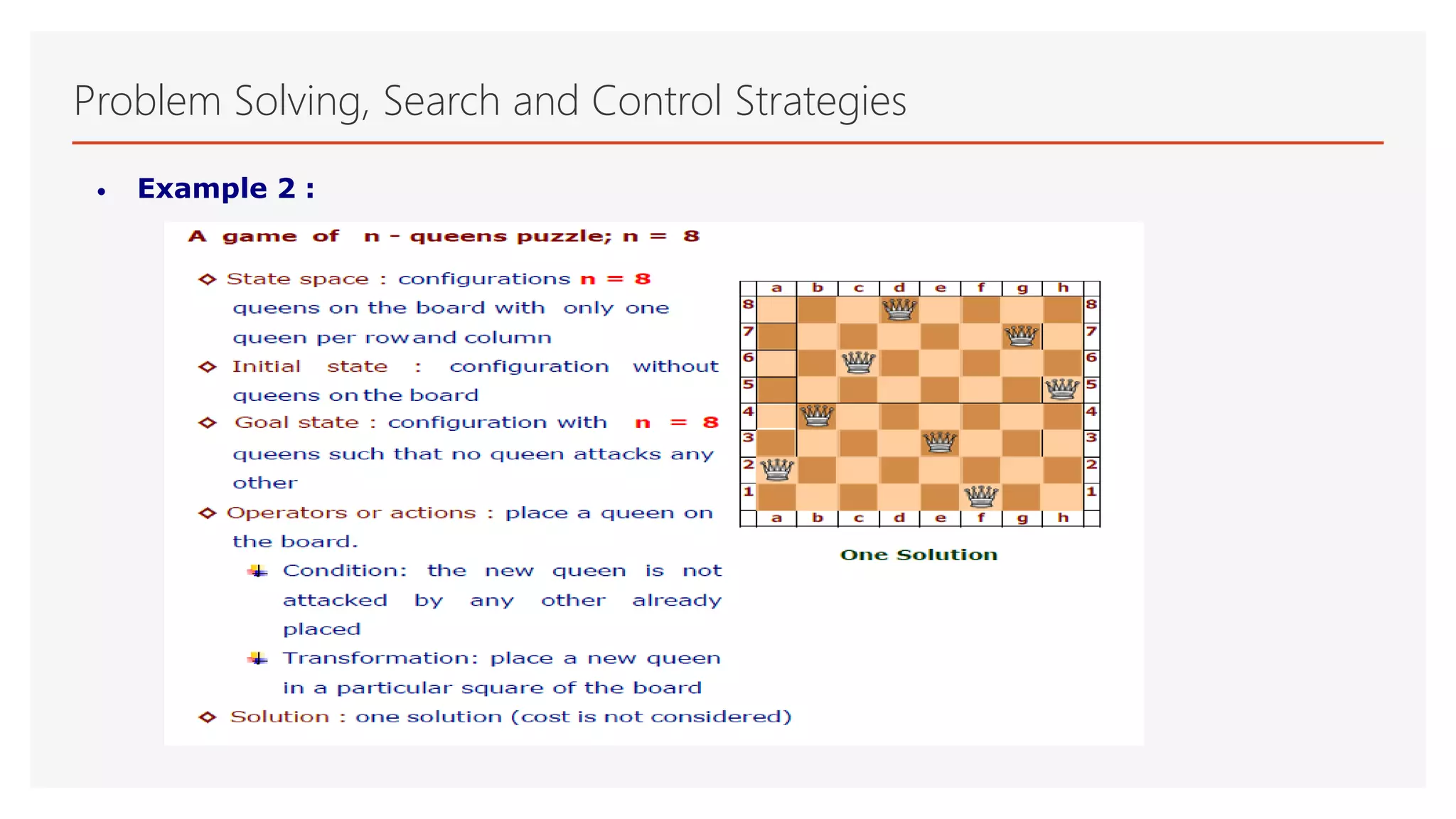
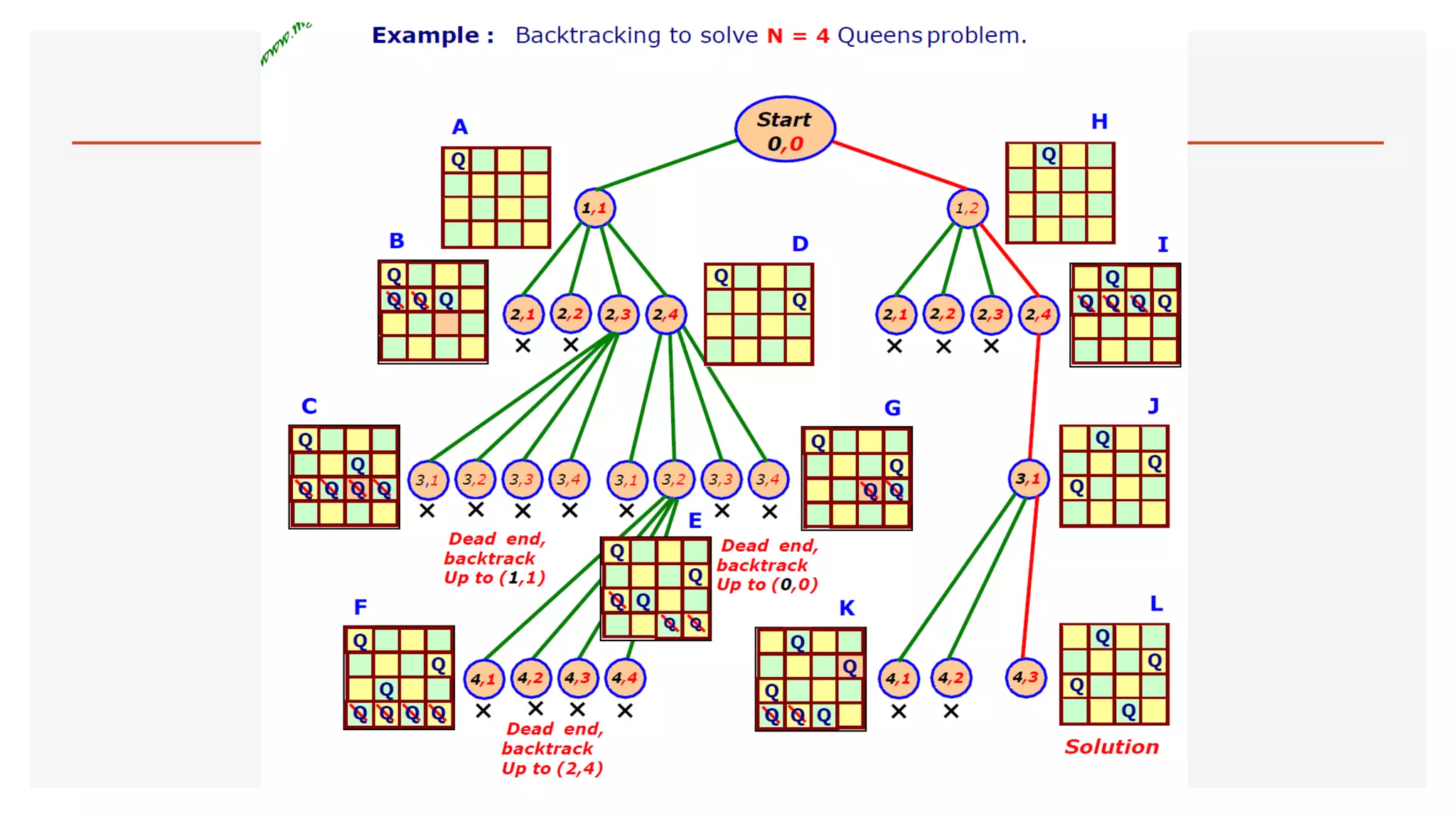
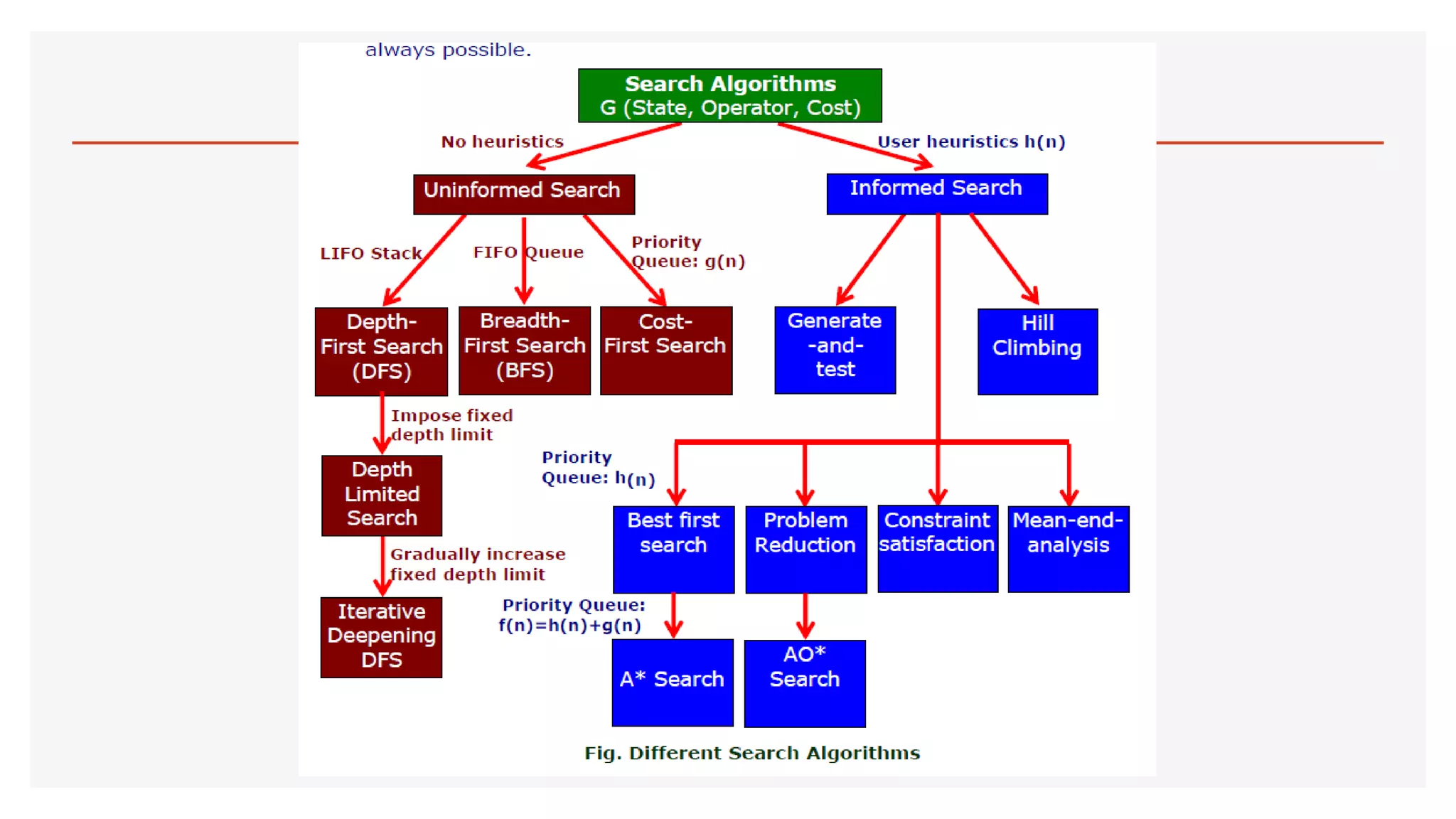
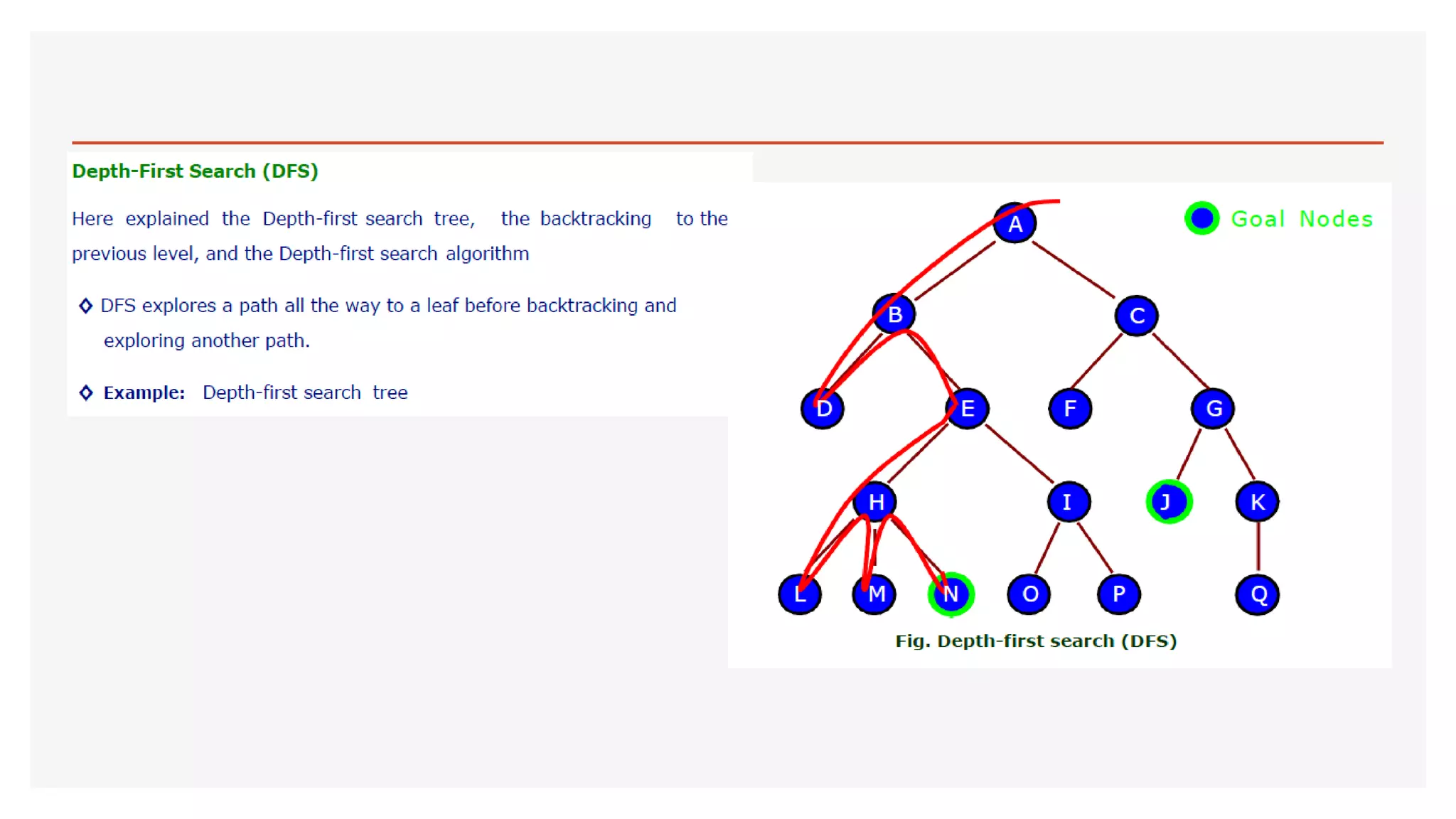

The document discusses problem solving, focusing on the definitions and elements involved, such as problem space, state space, initial and goal states, and the successor function. It emphasizes the need for effective search and control strategies in navigating through problem spaces, which can be represented as trees or graphs. Additionally, it highlights the importance of path and solution cost in evaluating problem solutions.






































![Language (1)[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/language11-230208135138-7565968f-thumbnail.jpg?width=600ounds&width=560&fit=bounds)




























