Download to read offline

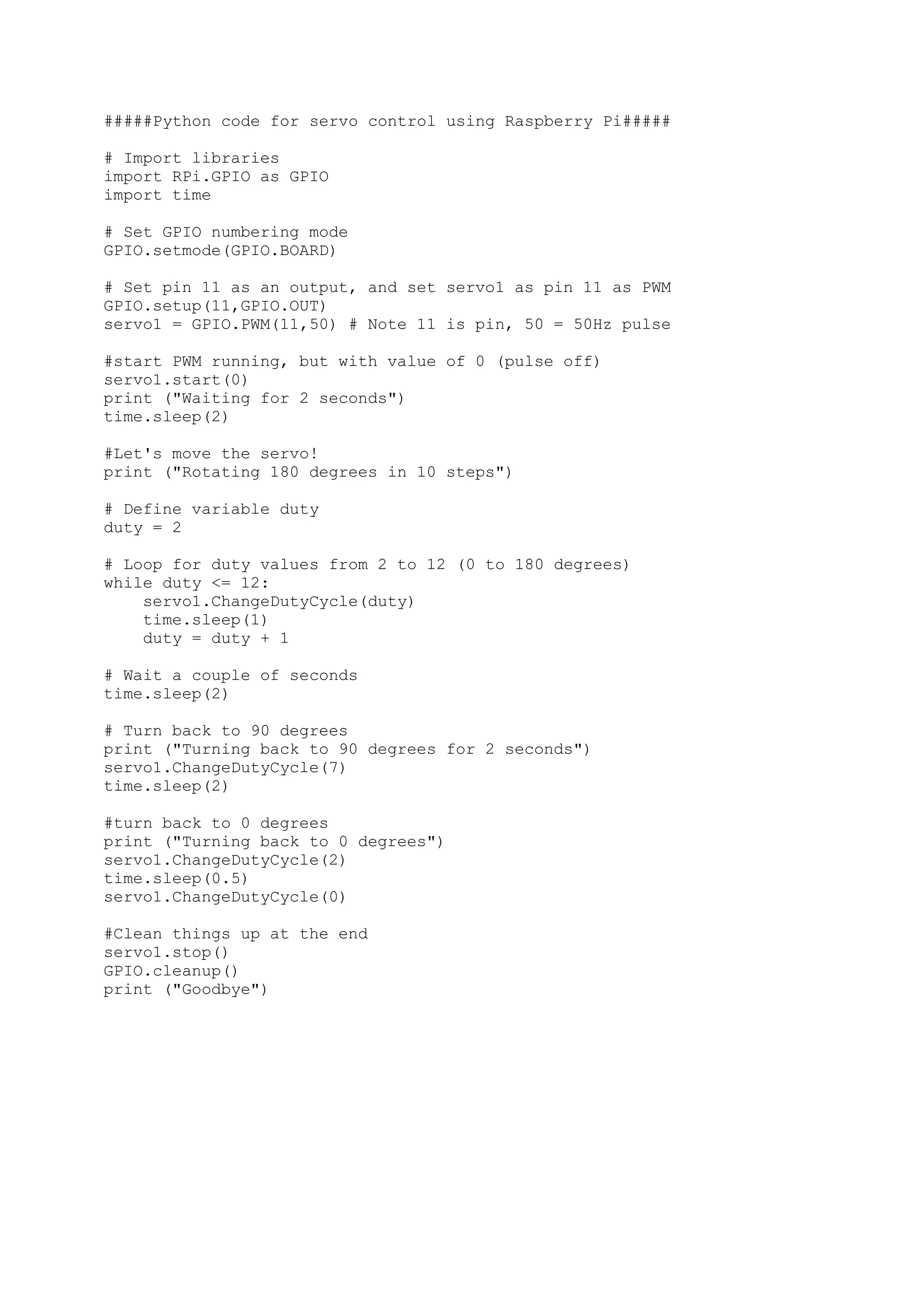

This Python code controls a servo motor connected to a Raspberry Pi by pulsing its control pin at 50Hz. It imports GPIO and time libraries, sets the pin mode and defines the servo pin as PWM output. It then sweeps the servo from 0 to 180 degrees in 10 steps over 10 seconds, pauses, returns to 90 degrees, pauses again and returns to 0 degrees before stopping PWM and cleaning up GPIO.



























![[5]投影片 futurewad樹莓派研習會 141218](https://cdn.slidesharecdn.com/ss_thumbnails/5futurewad141218-141219162301-conversion-gate02-thumbnail.jpg?width=600ounds&width=560&fit=bounds)




















































