Downloaded 68 times




![Relay controller sample code
import RPi.GPIO as GPIO
import time
pins = [22,23,24,25]
for p in pins:
GPIO.setup(p, GPIO.OUT)
while True:
for q in pins:
GPIO.output(q, GPIO.HIGH)
time.sleep(5)
for q in pins:
GPIO.output(q, GPIO.LOW)
time.sleep(5)](https://image.slidesharecdn.com/workingwitharaspberrypi-151128155857-lva1-app6892/85/Sensors-actuators-and-the-Raspberry-PI-using-Python-13-320.jpg)






![Relay controller sample code
import RPi.GPIO as GPIO
import time
pins = [22,23,24,25]
for p in pins:
GPIO.setup(p, GPIO.OUT)
while True:
for q in pins:
GPIO.output(q, GPIO.HIGH)
time.sleep(5)
for q in pins:
GPIO.output(q, GPIO.LOW)
time.sleep(5)](https://image.slidesharecdn.com/workingwitharaspberrypi-151128155857-lva1-app6892/75/Sensors-actuators-and-the-Raspberry-PI-using-Python-13-2048.jpg)
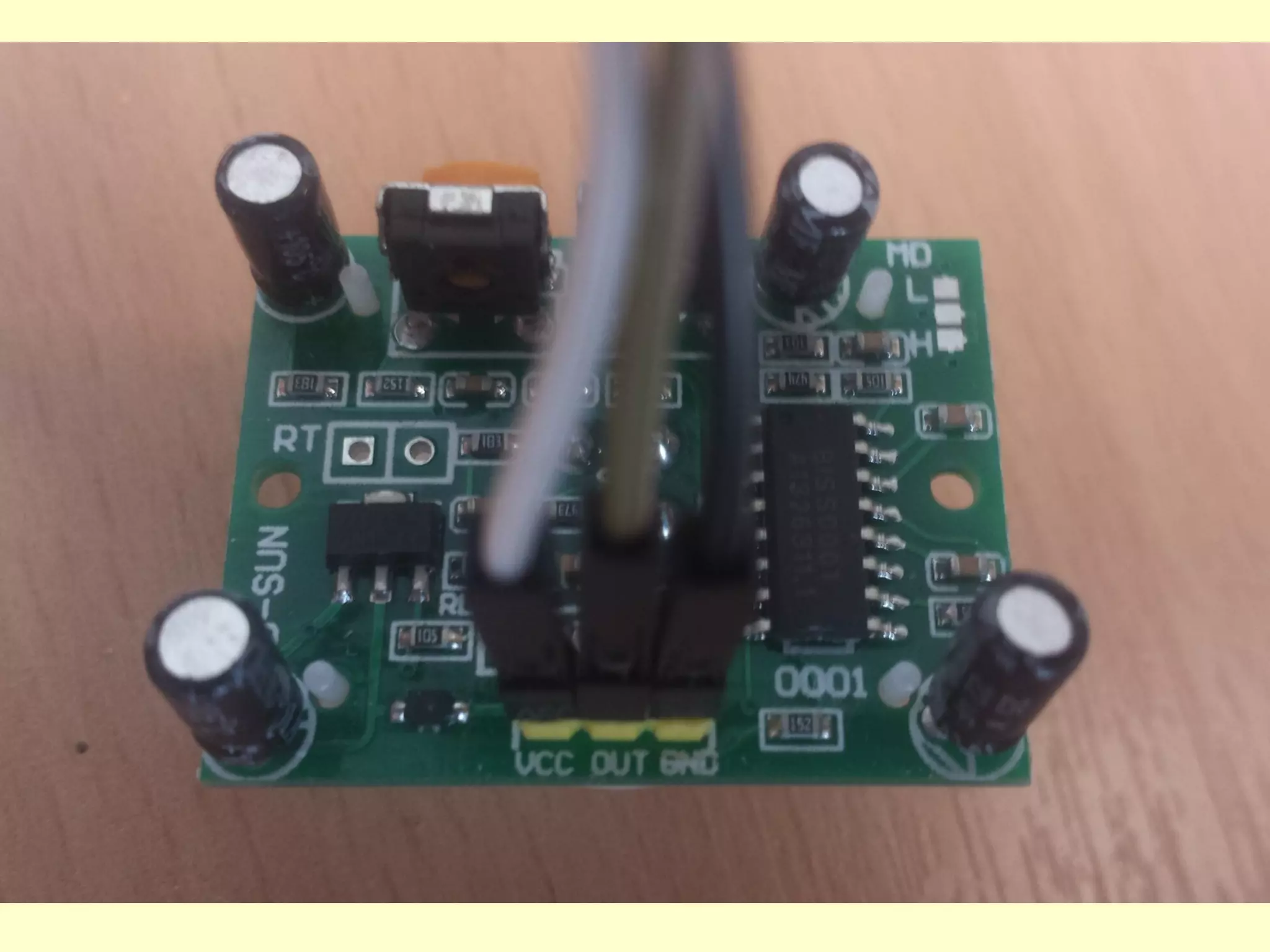
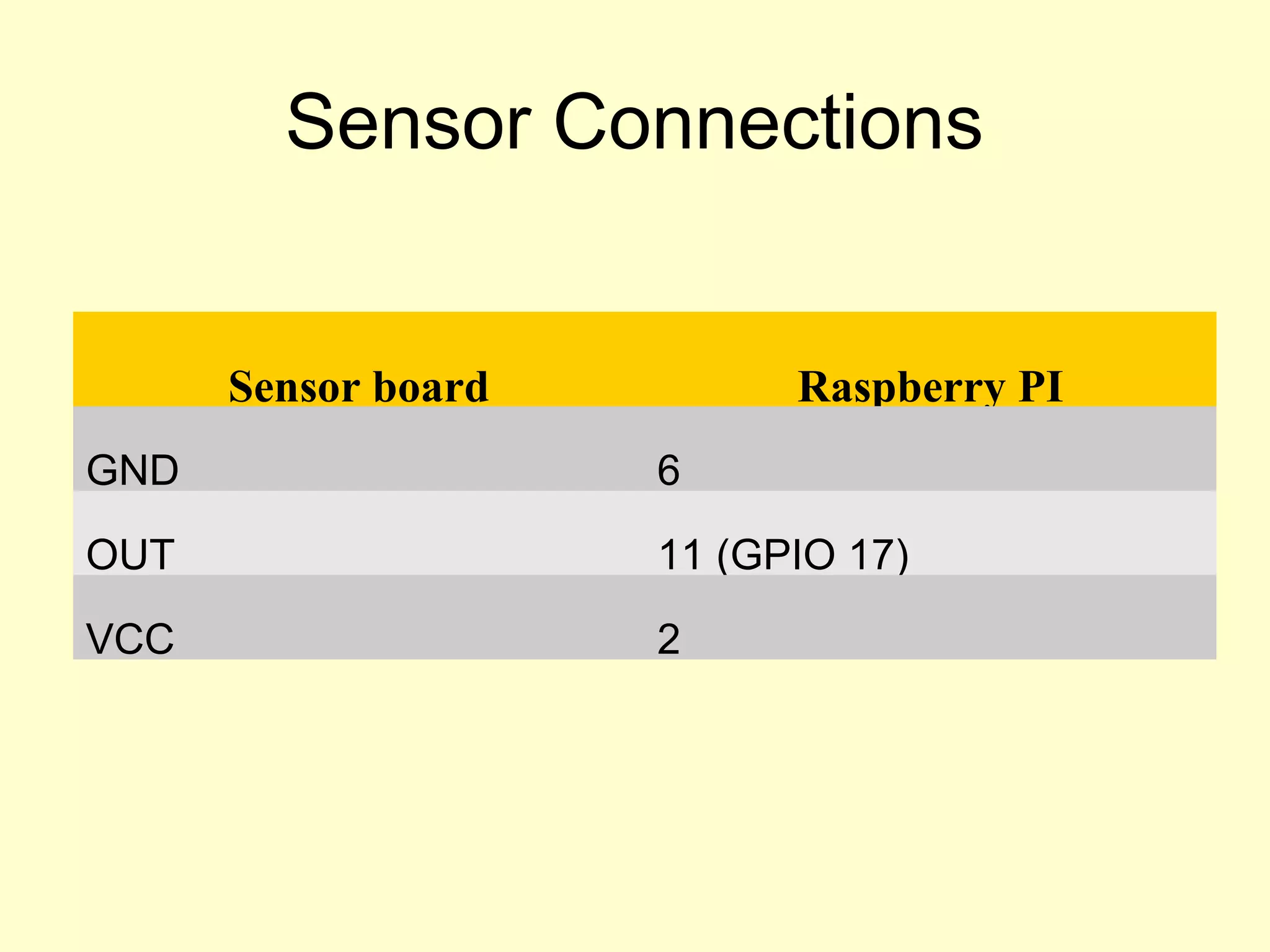
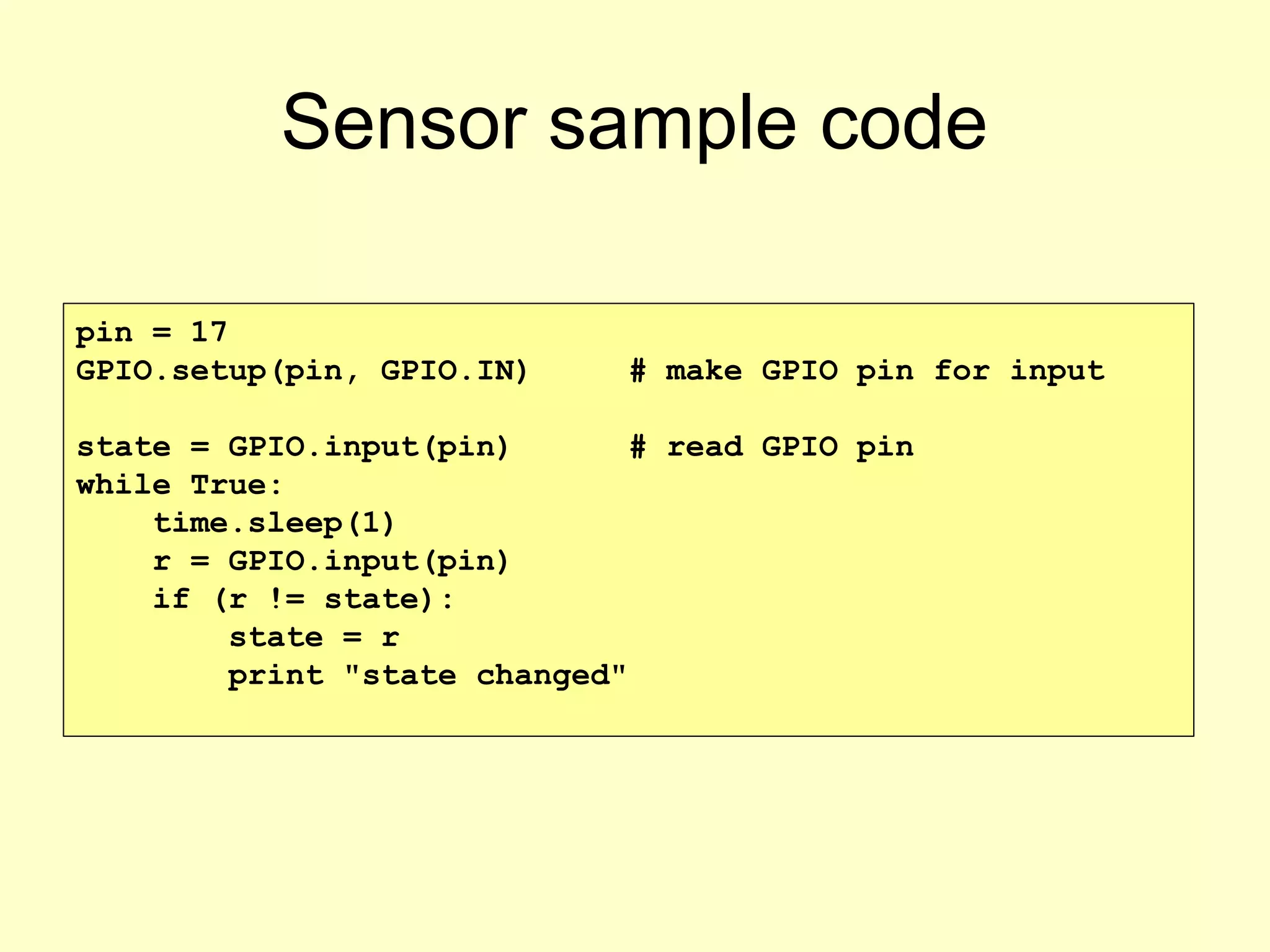
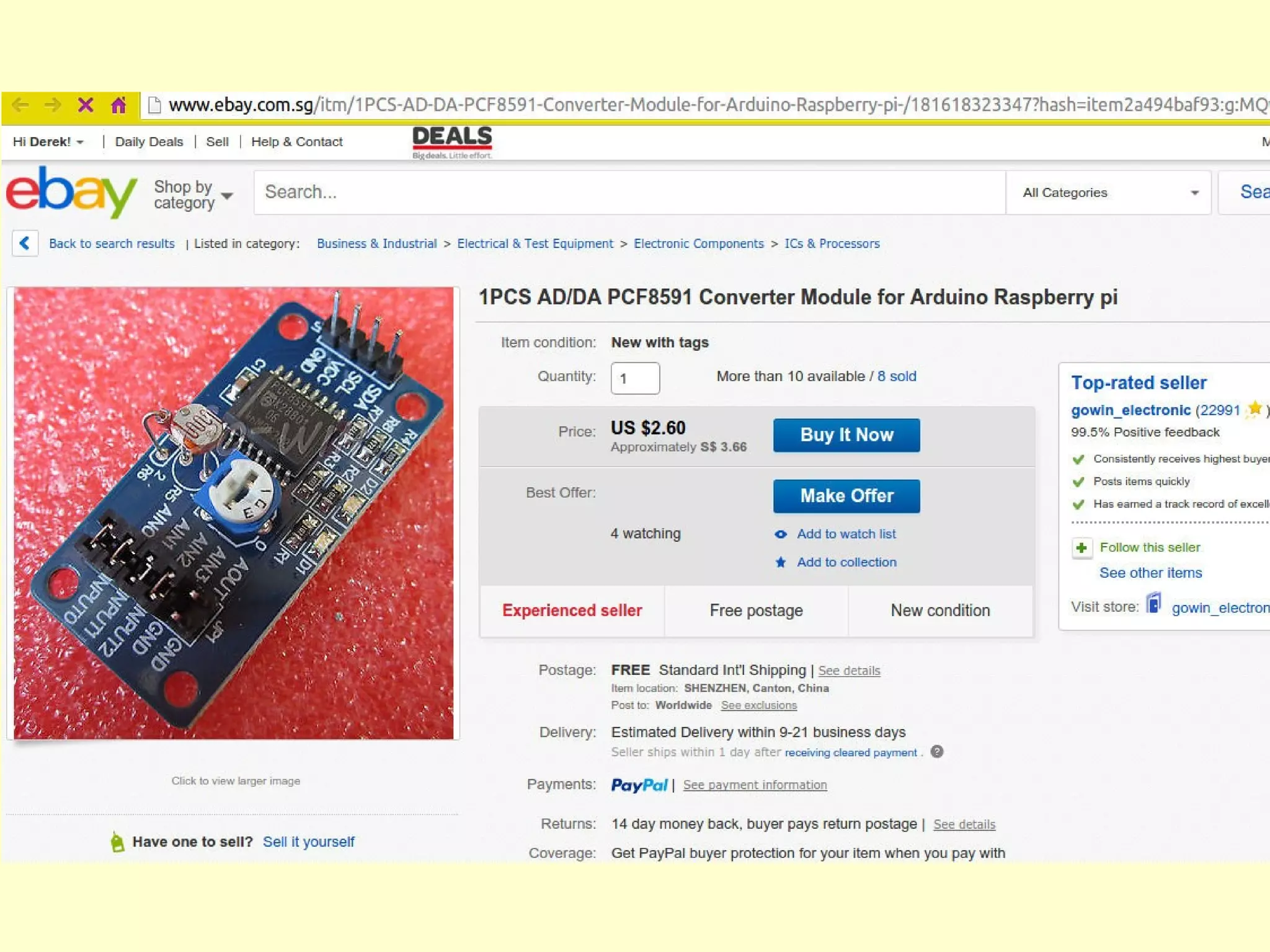
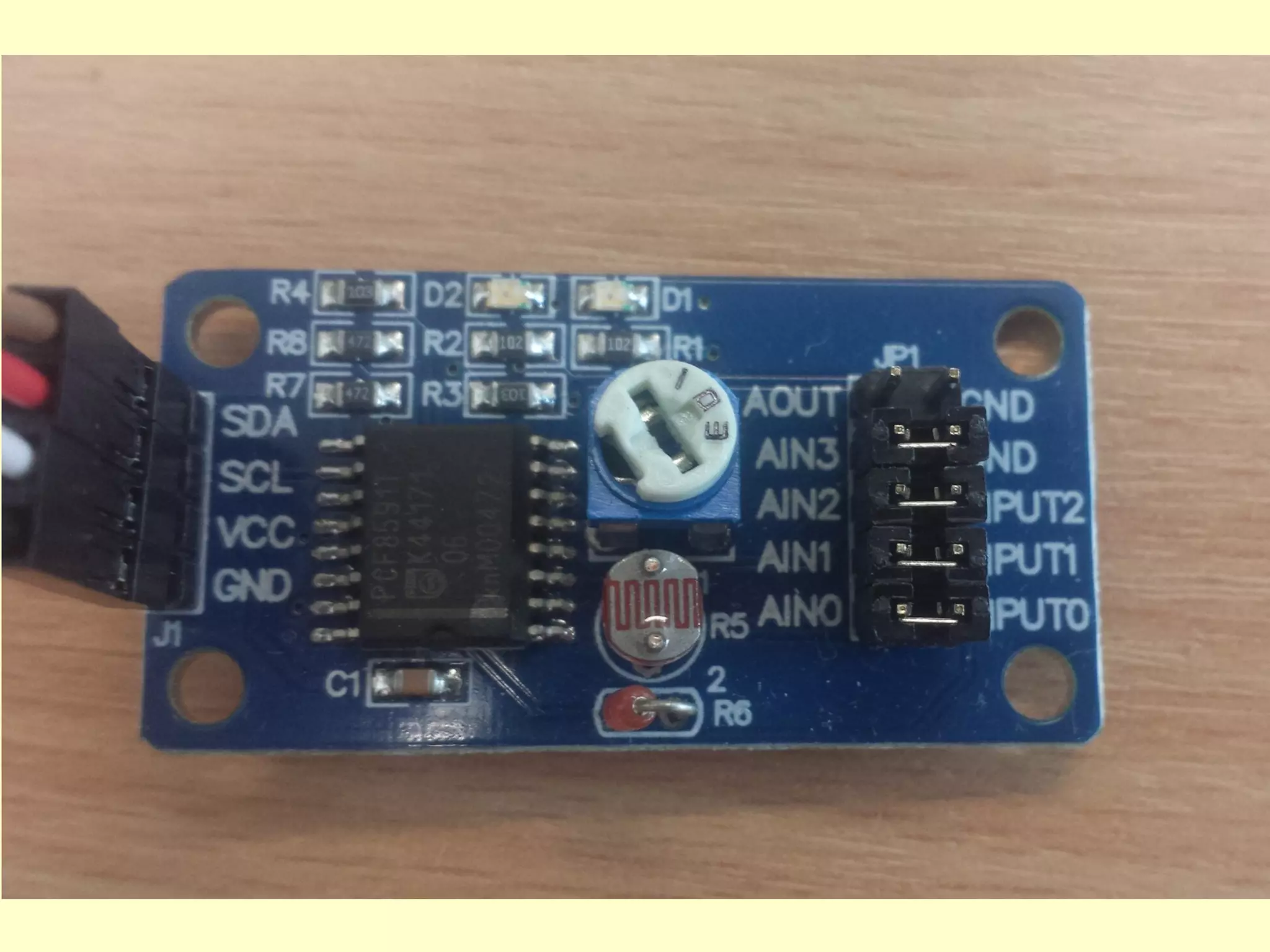
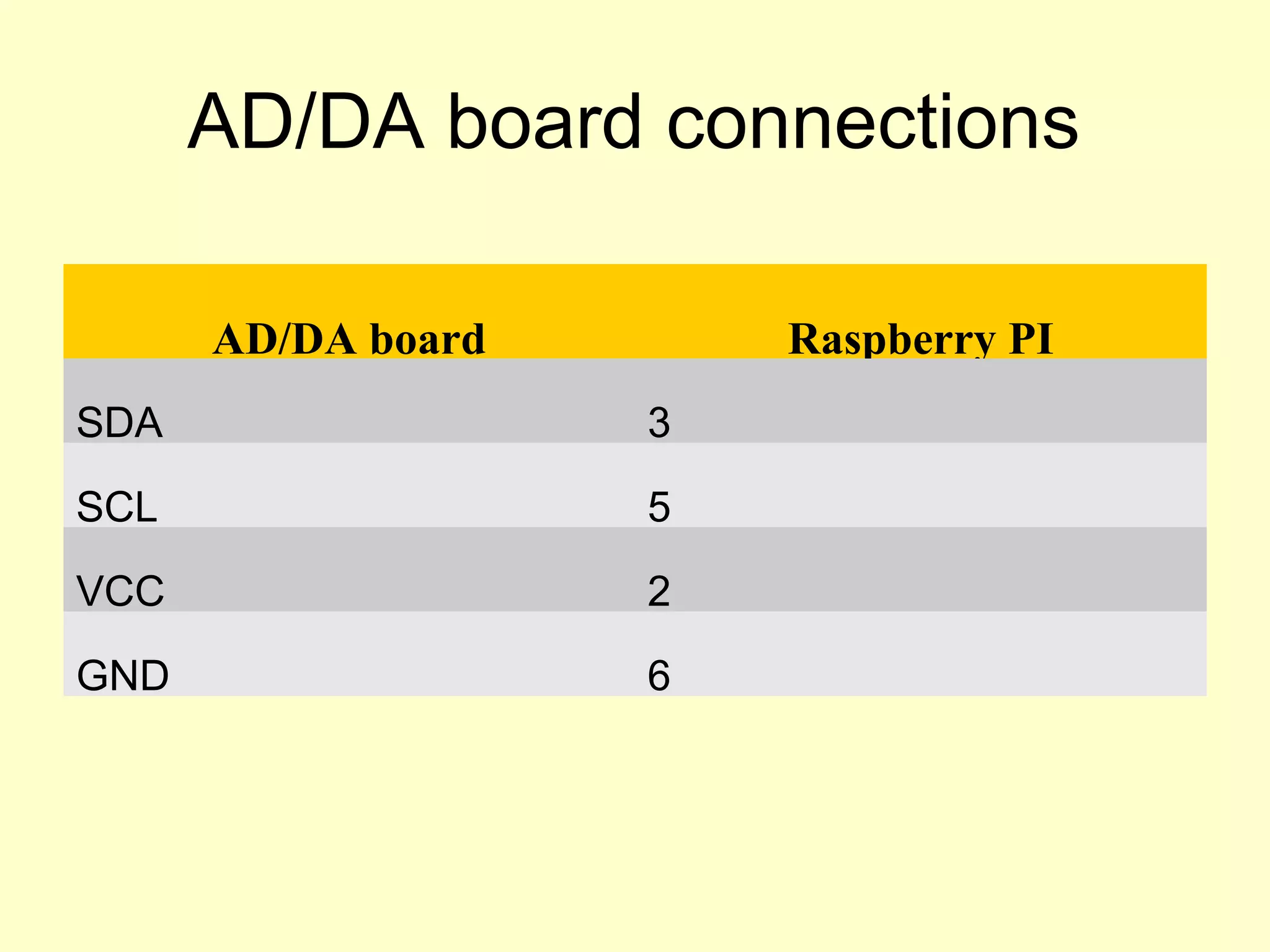
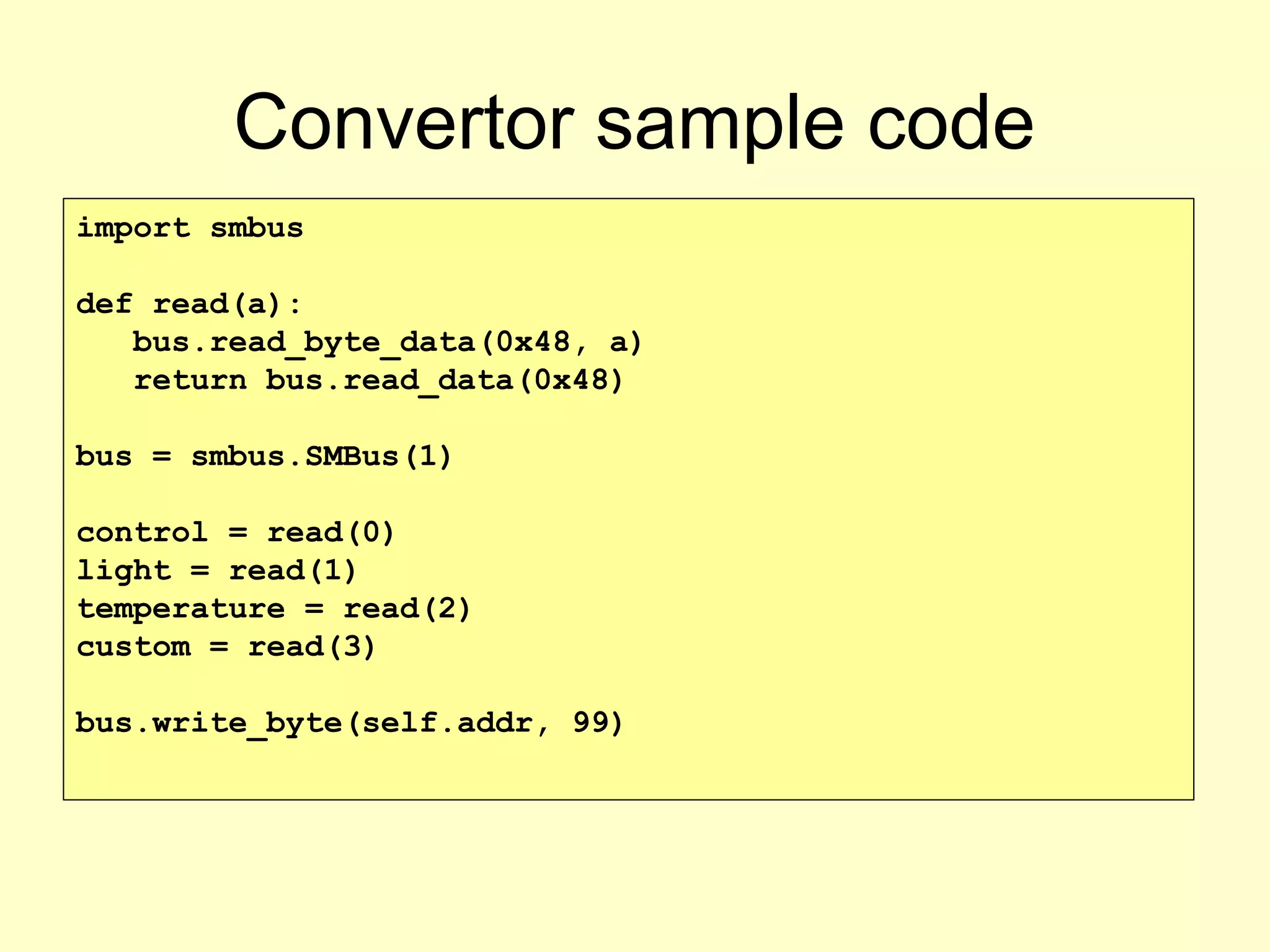


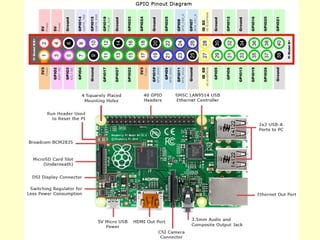
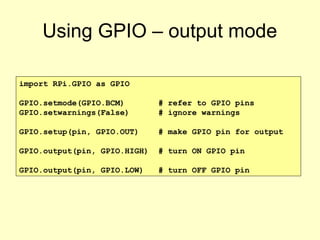
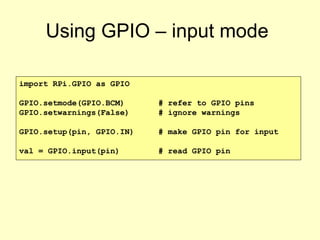
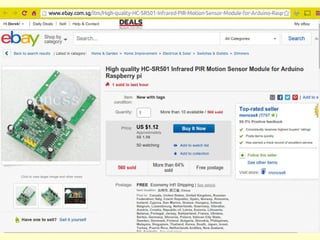
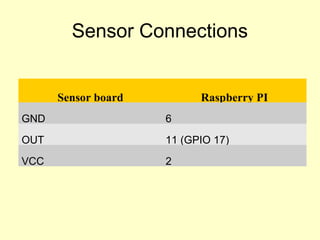
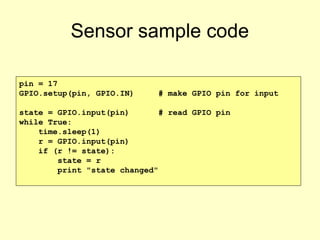
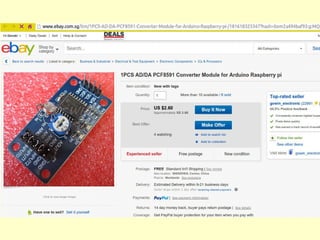
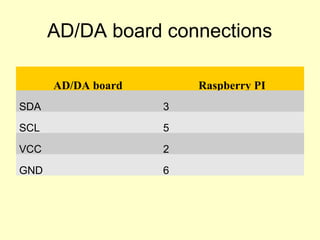
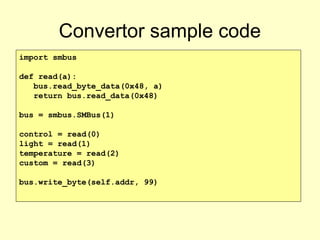
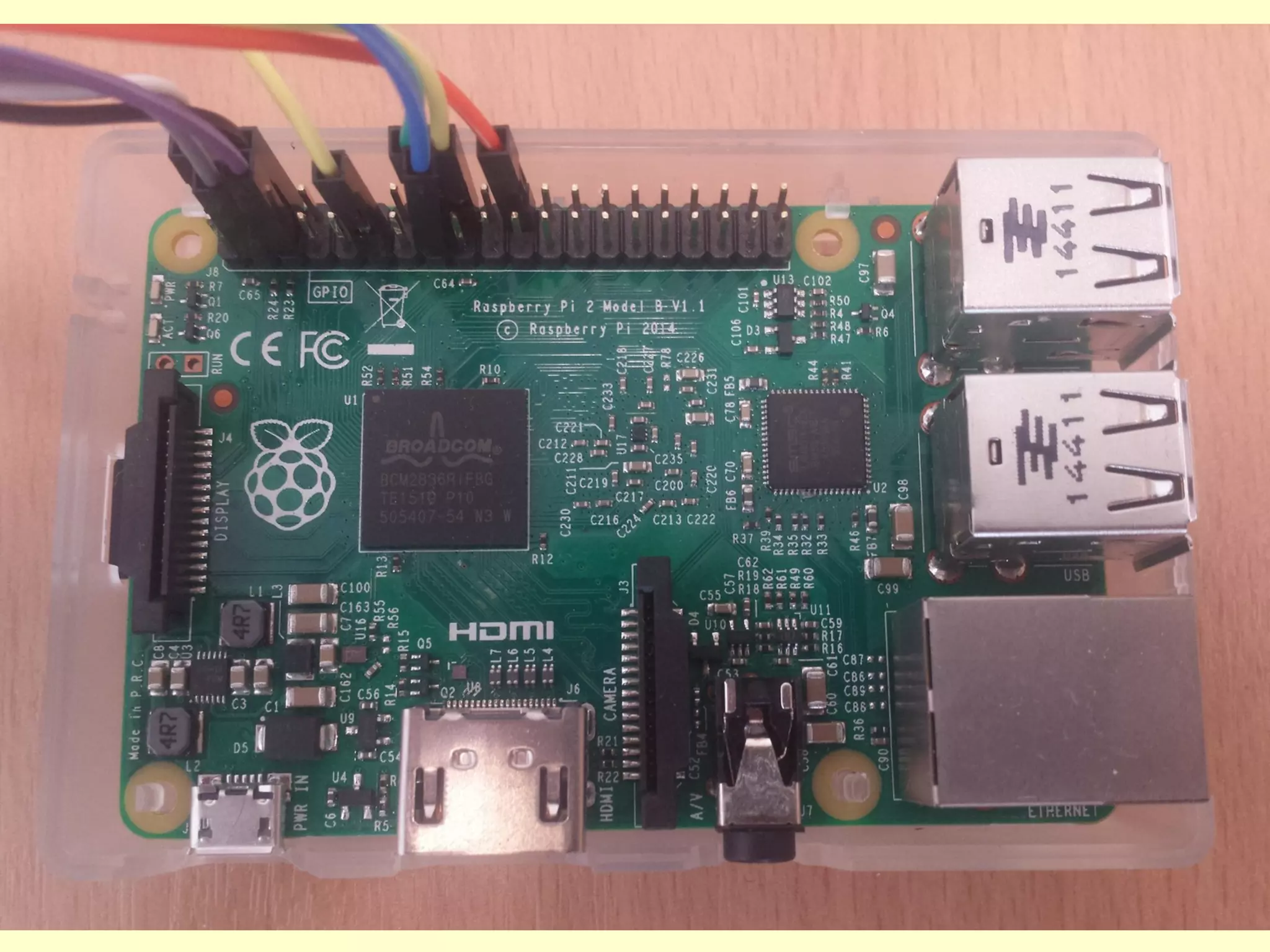
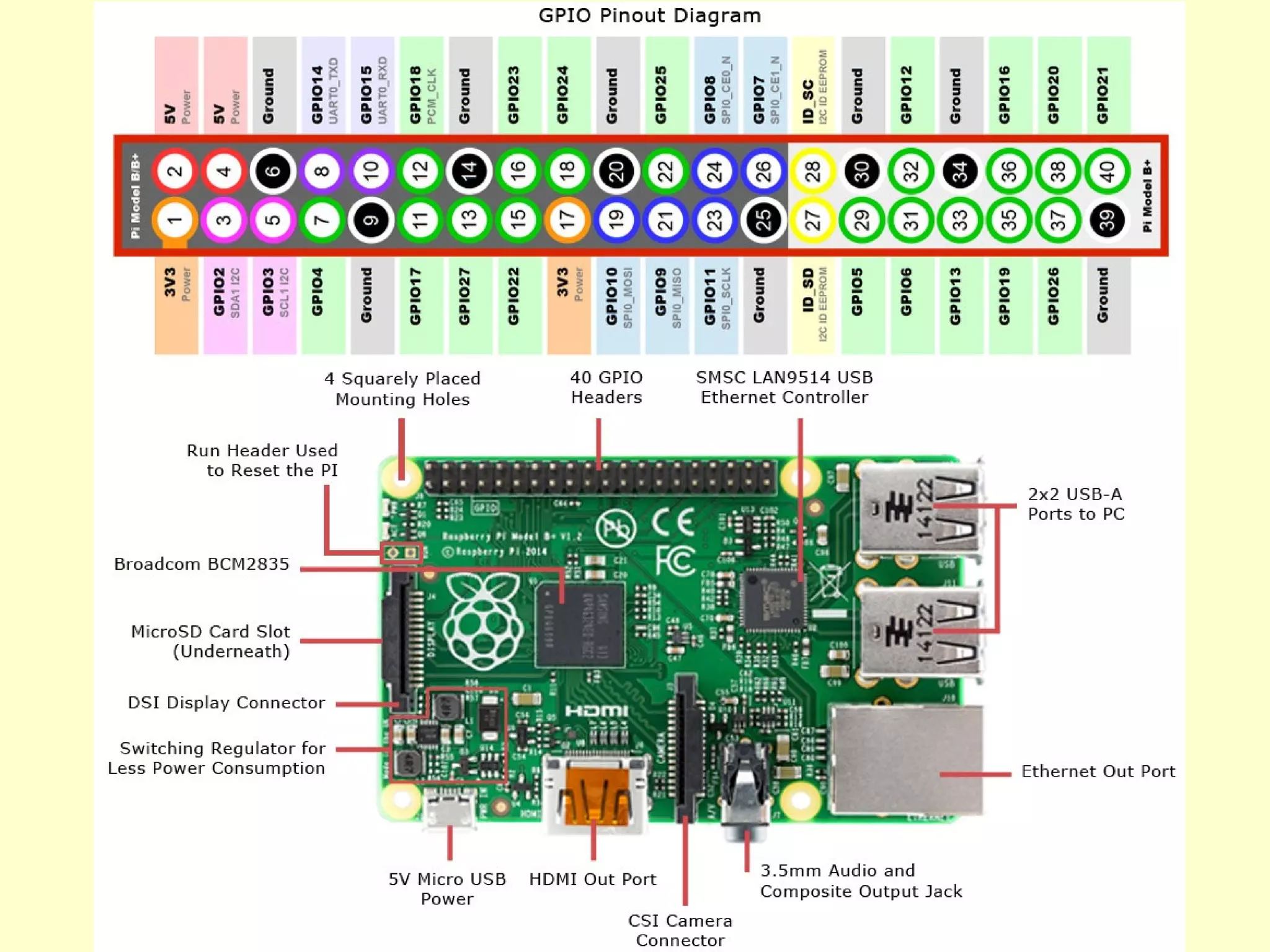
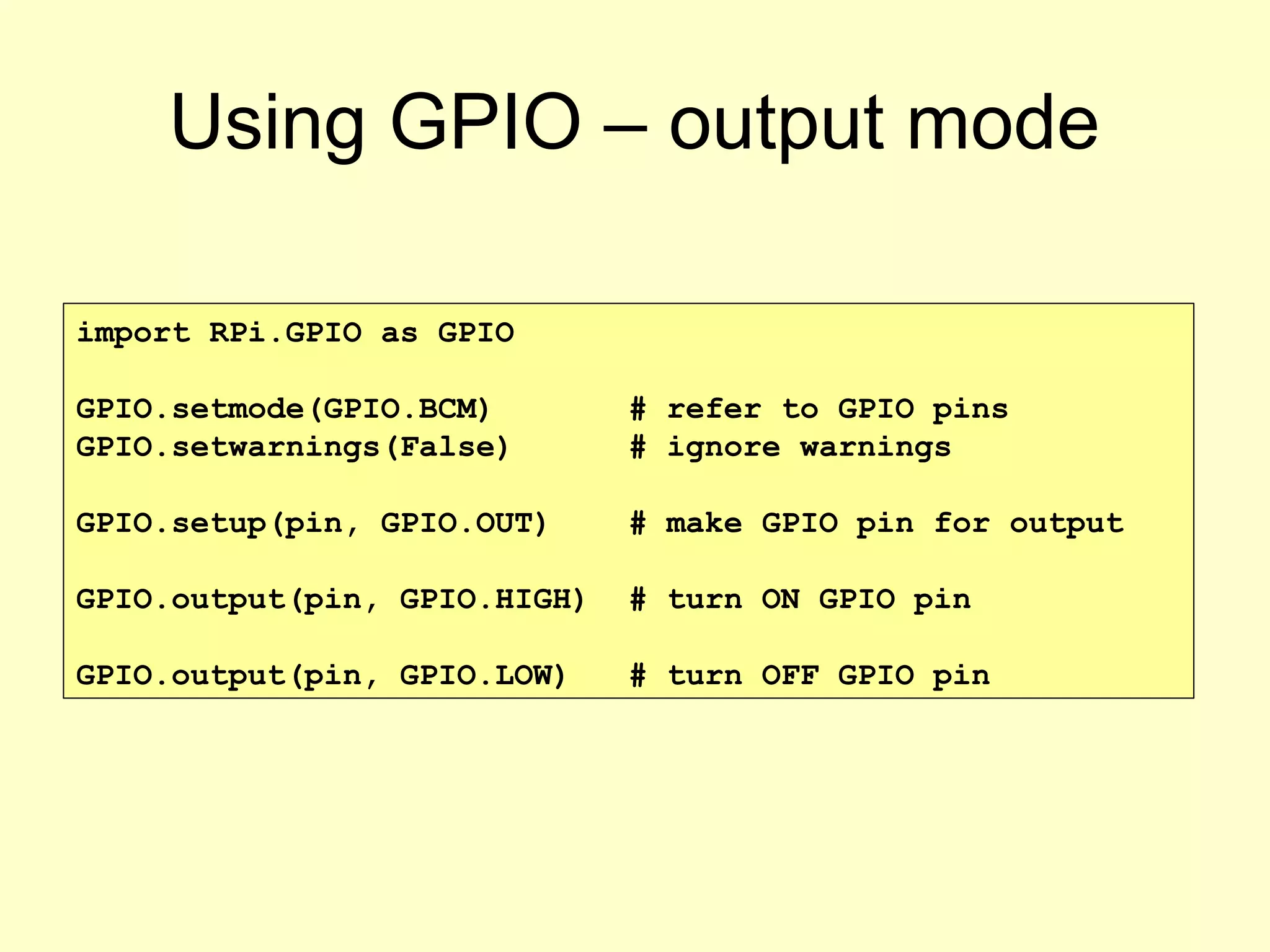
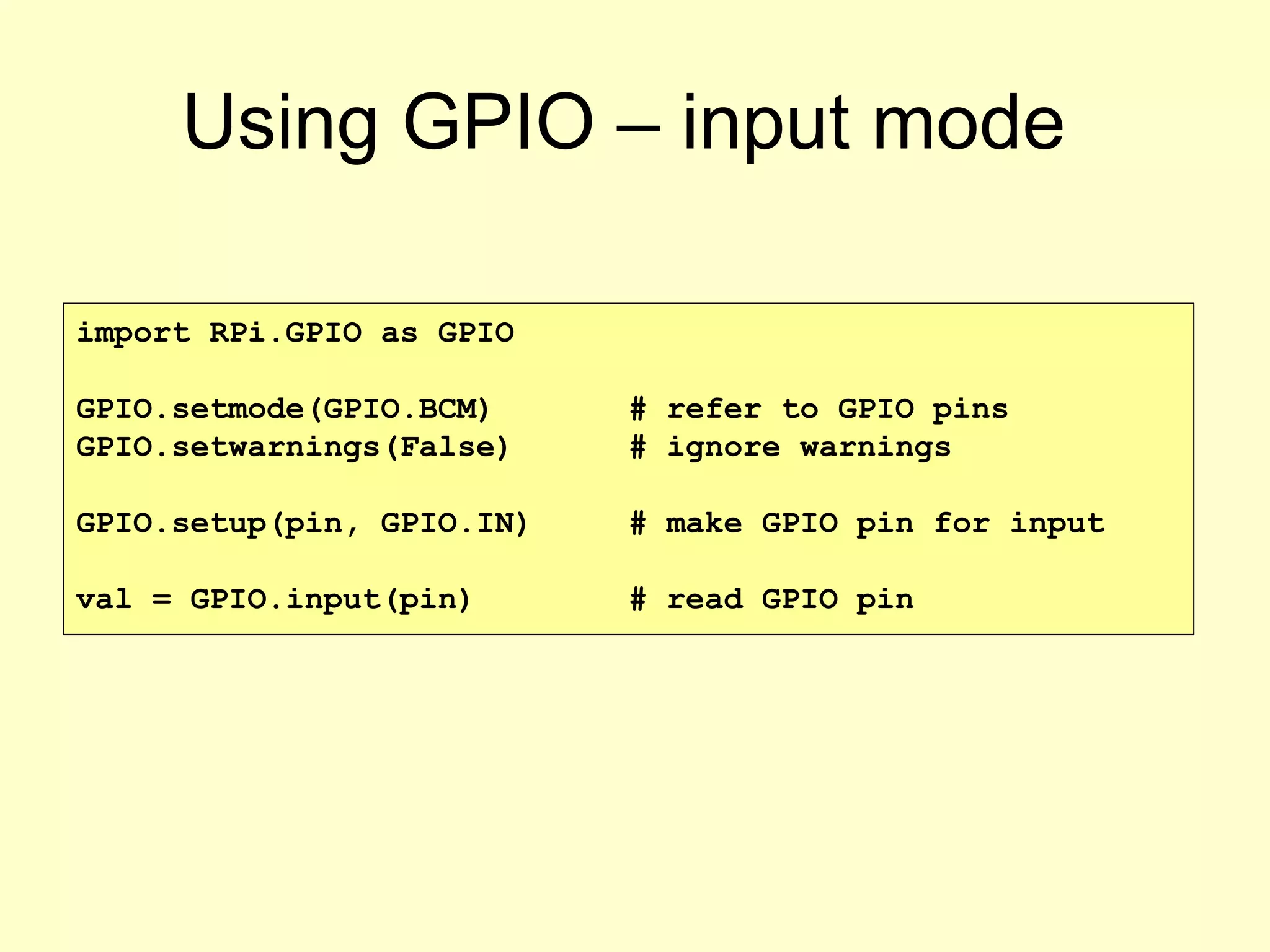
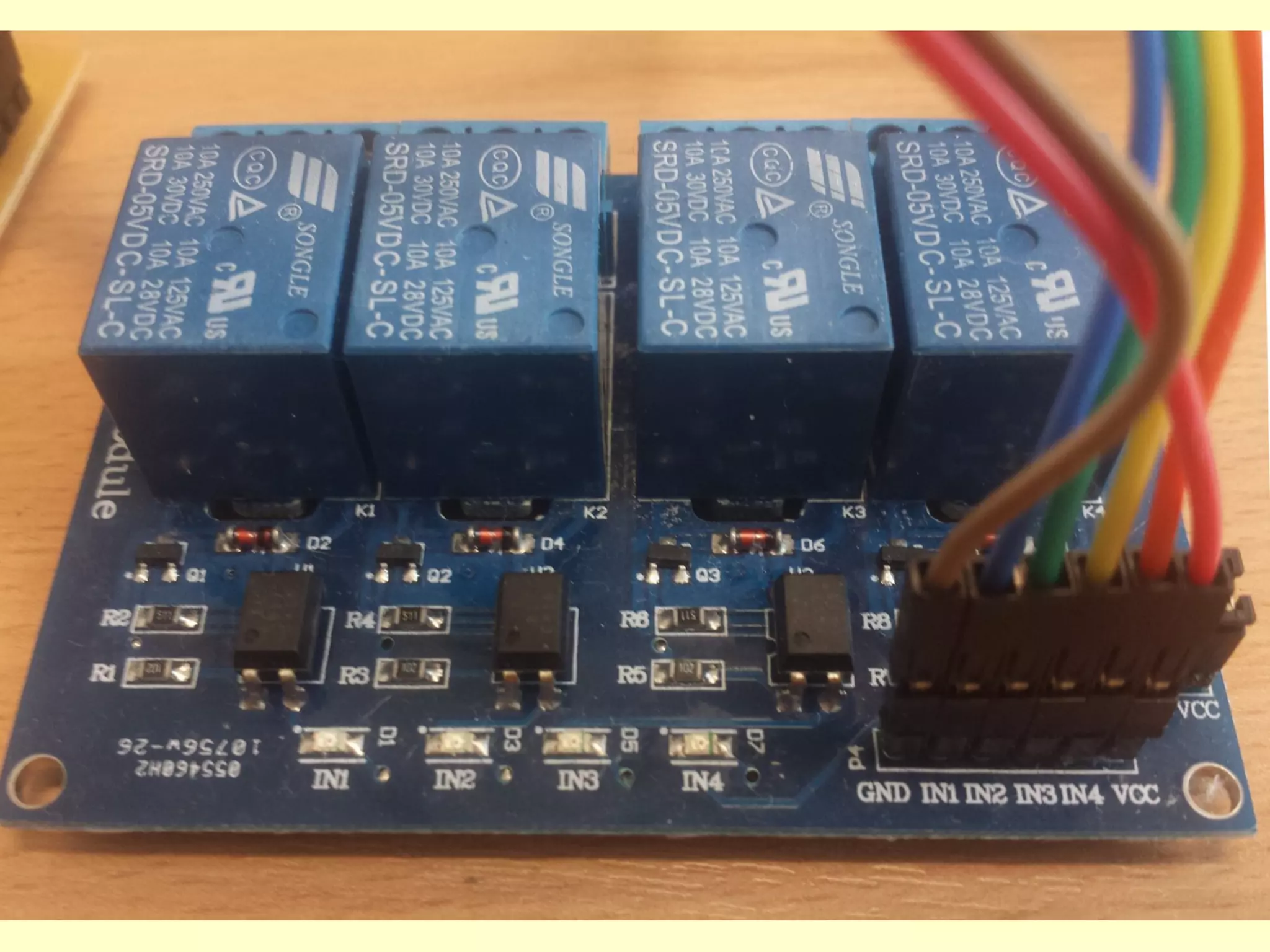
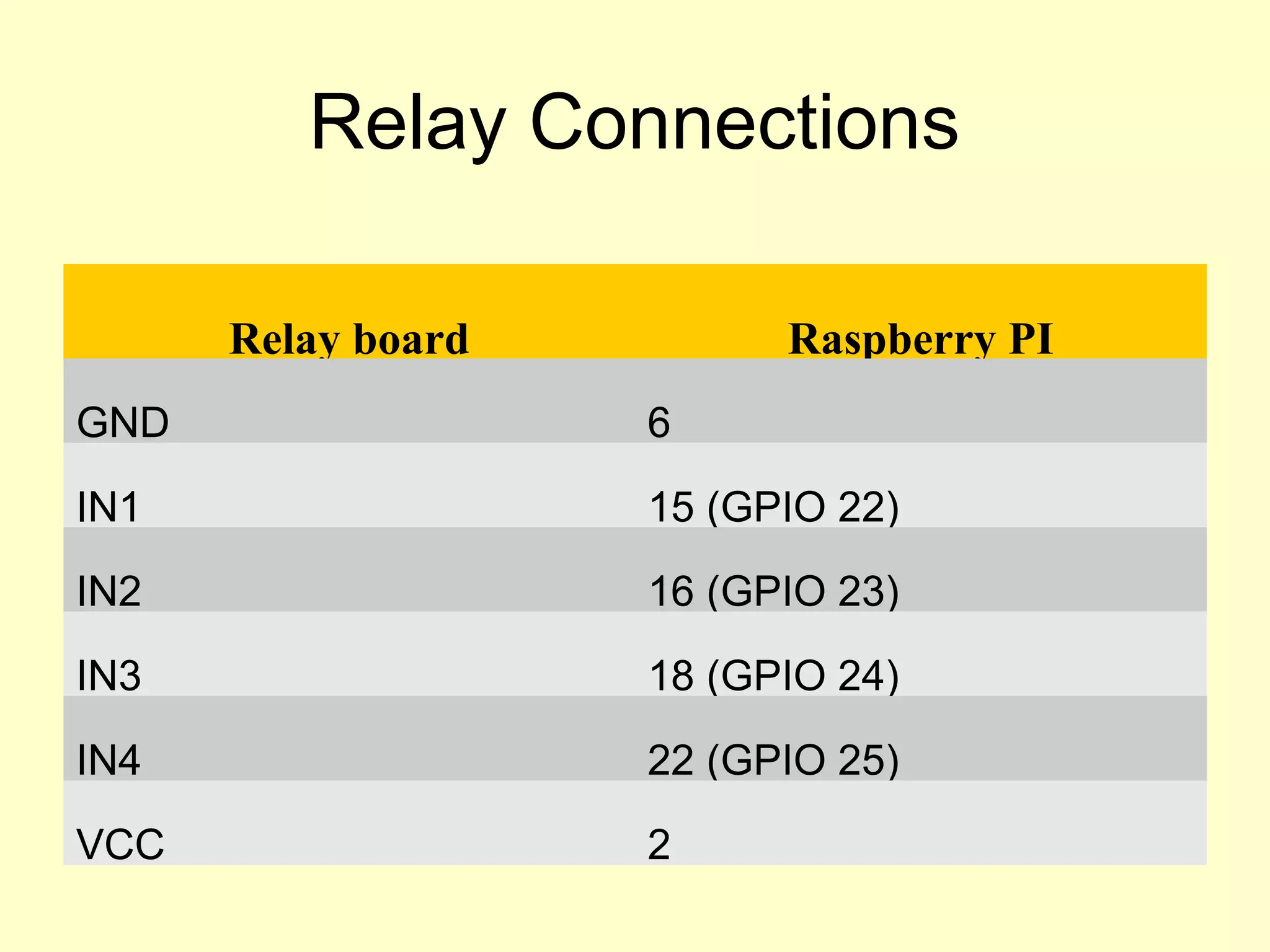
This document discusses connecting sensors, actuators, and other peripherals to a Raspberry Pi using GPIO pins and programming their functionality using Python. It provides code samples for configuring GPIO pins for input and output, controlling relays connected to GPIO pins, reading from a sensor connected to a GPIO pin, and communicating with an AD/DA board over I2C.

















































![[5]投影片 futurewad樹莓派研習會 141218](https://cdn.slidesharecdn.com/ss_thumbnails/5futurewad141218-141219162301-conversion-gate02-thumbnail.jpg?width=600ounds&width=560&fit=bounds)






















