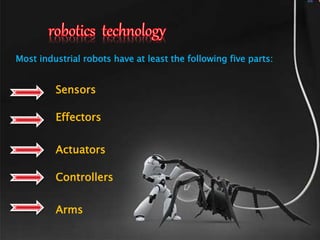
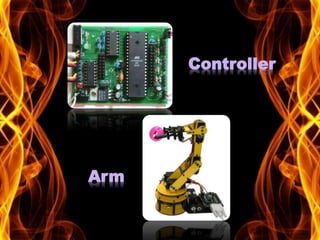
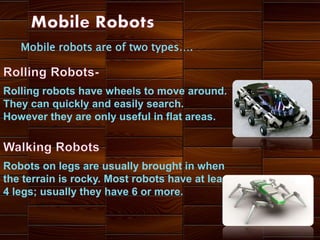
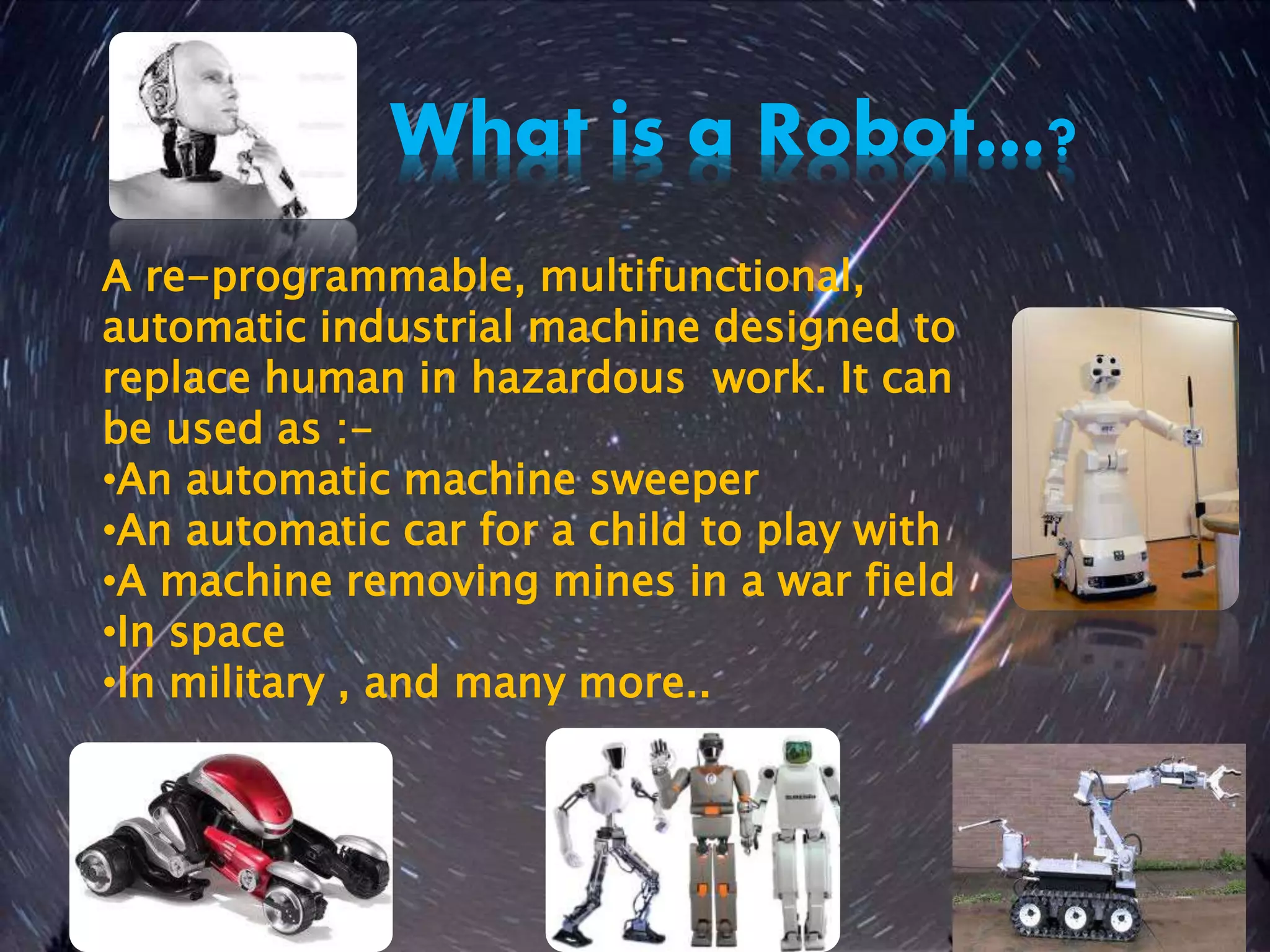
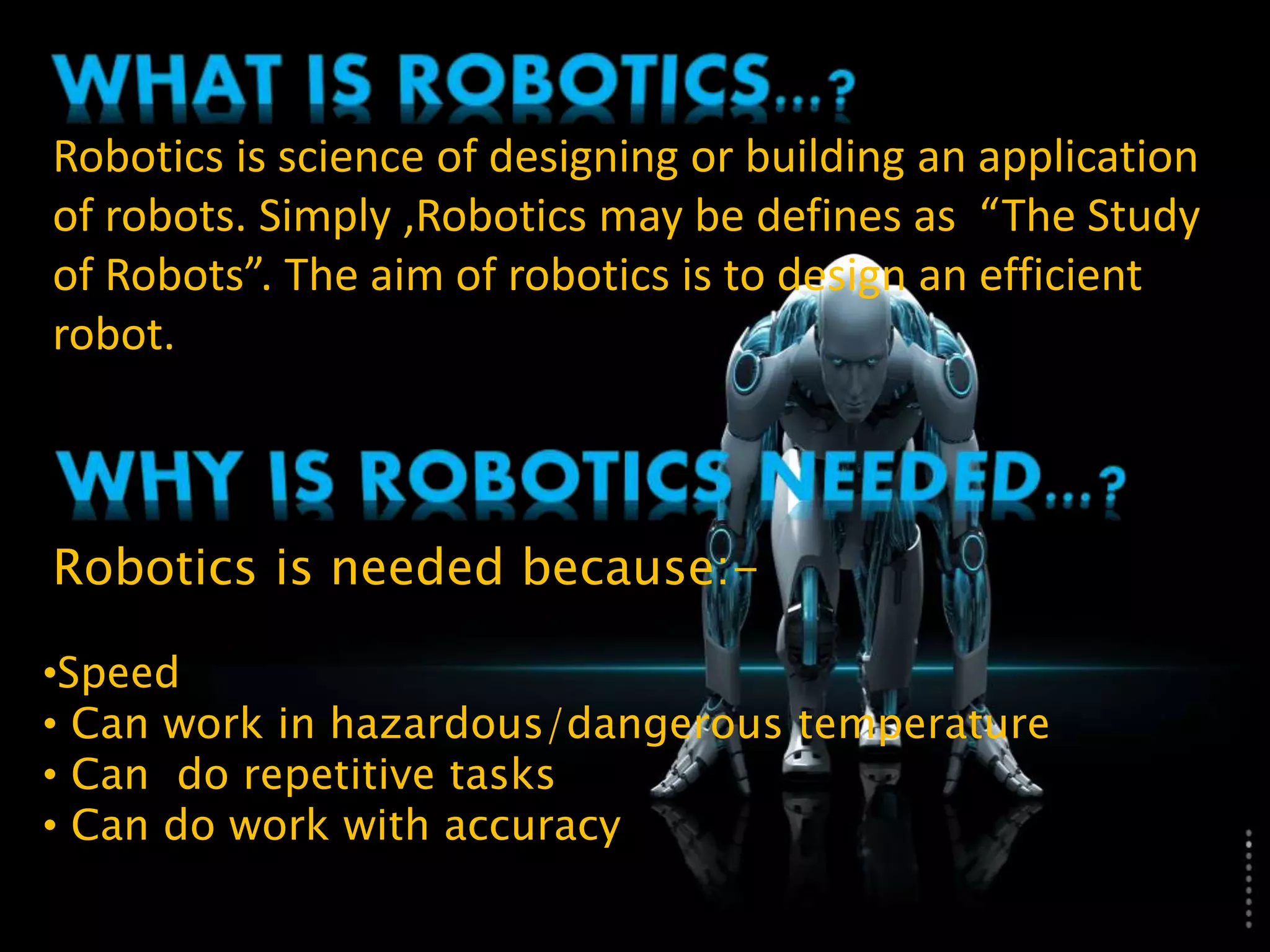
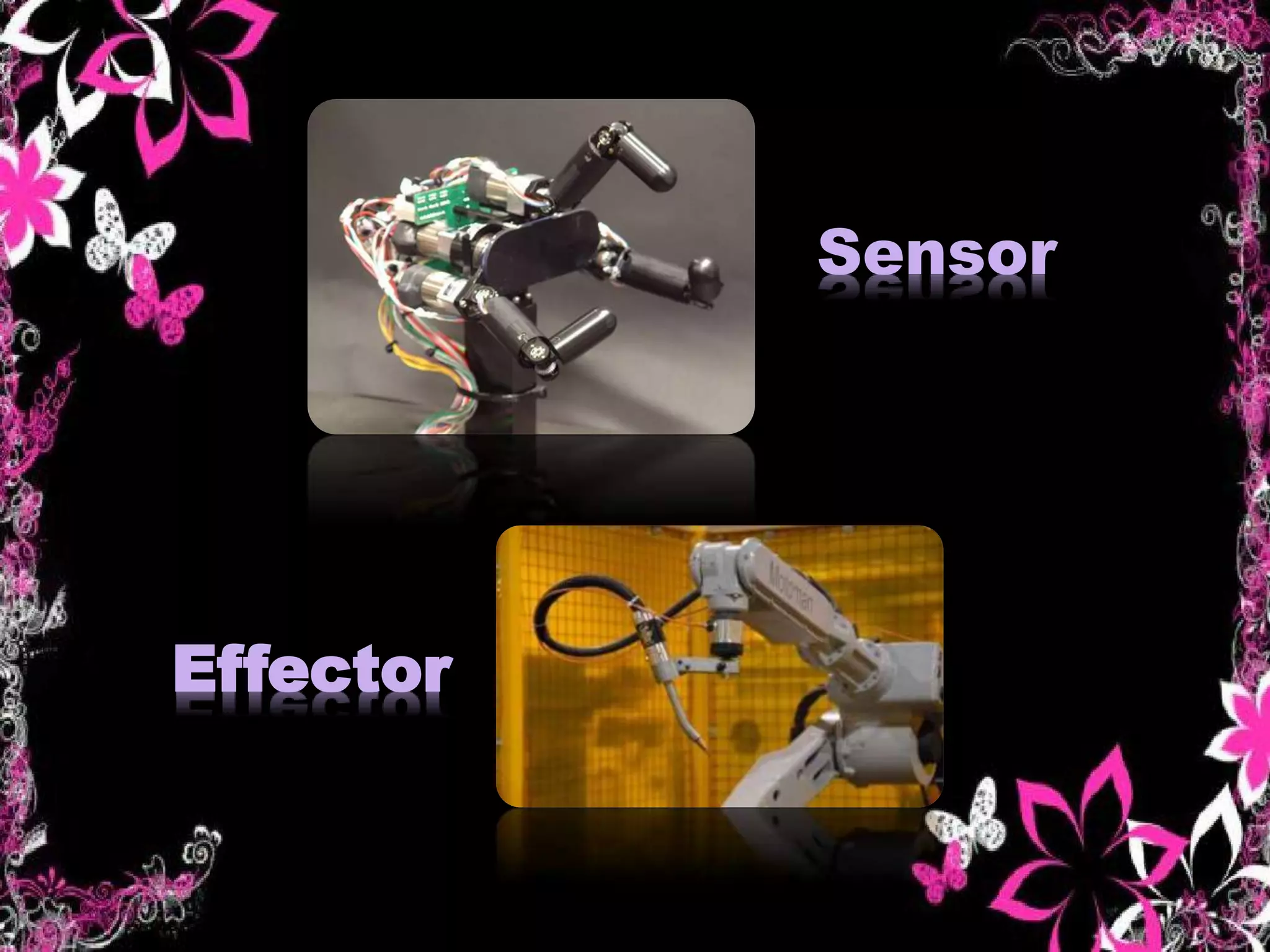
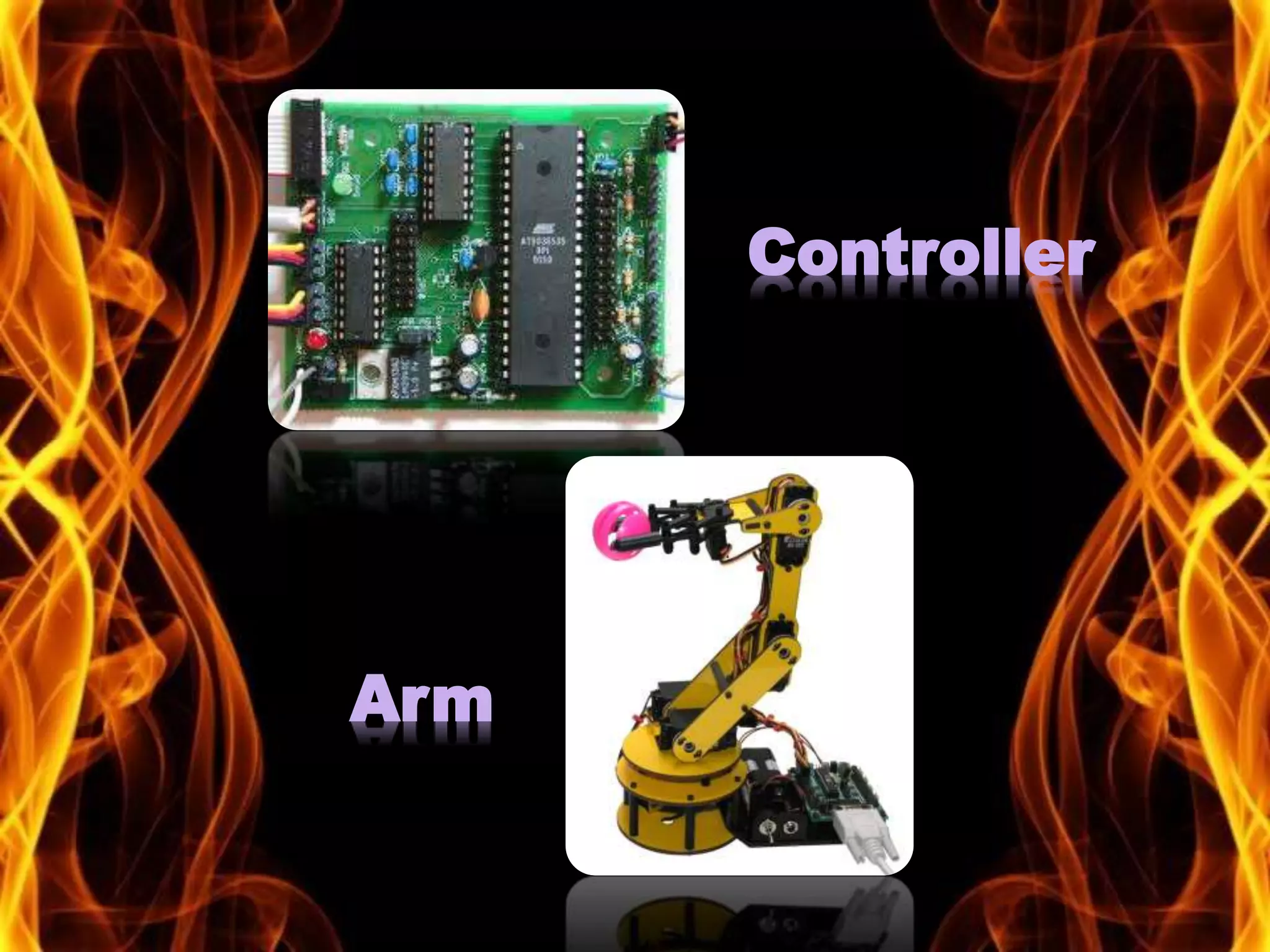
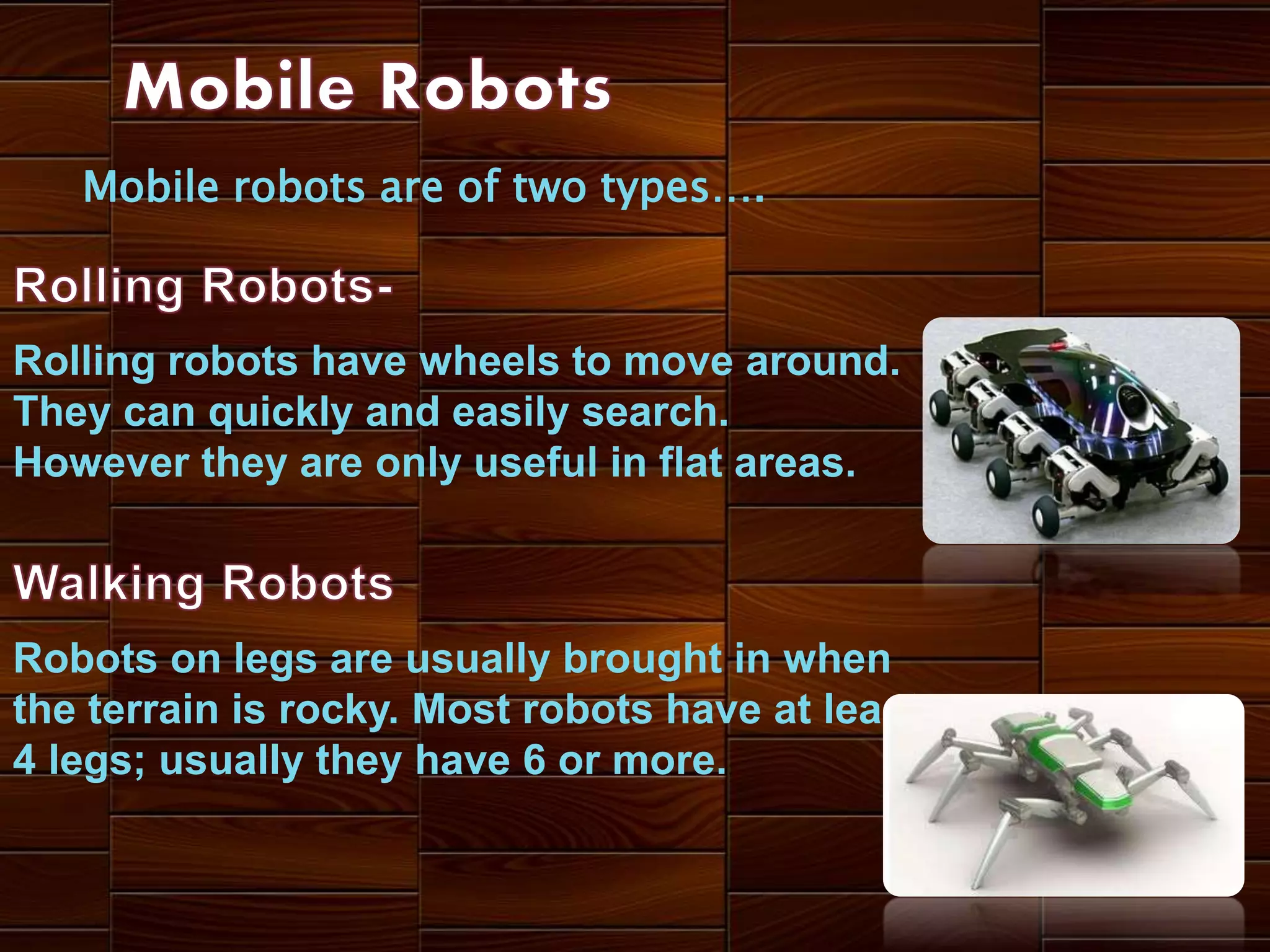
This document provides an overview of robots and robotics. It defines a robot as a re-programmable, multifunctional machine that can perform tasks like sweeping or working in hazardous environments like mines or war zones. The document discusses the history and origins of the word "robot," coined by Karel Capek in 1920 and popularized by Isaac Asimov in the 1940s. It also summarizes Asimov's Three Laws of Robotics. The main components of industrial robots are then outlined as sensors, effectors, actuators, controllers, and arms. Common types of robots like mobile, autonomous, remotely operated, and virtual robots are also summarized. Finally, some advantages and disadvantages of robots are listed.




























































![UiPath Automation Suite Installation (Hands-On) [2/3]](https://cdn.slidesharecdn.com/ss_thumbnails/automationsuitecommunitysession2-251015095633-a6d862f1-thumbnail.jpg?width=600ounds&width=560&fit=bounds)









