Downloaded 19 times



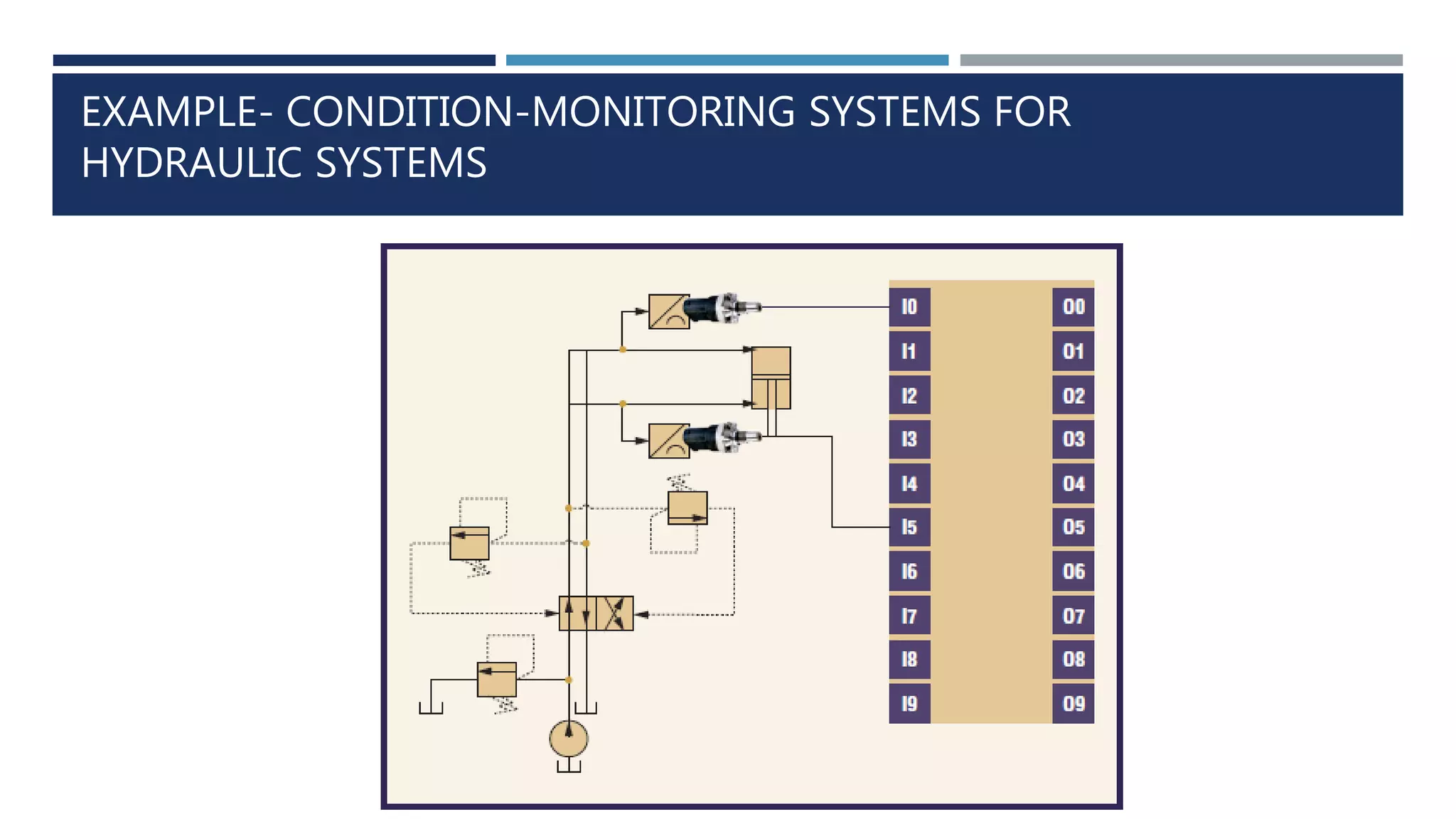

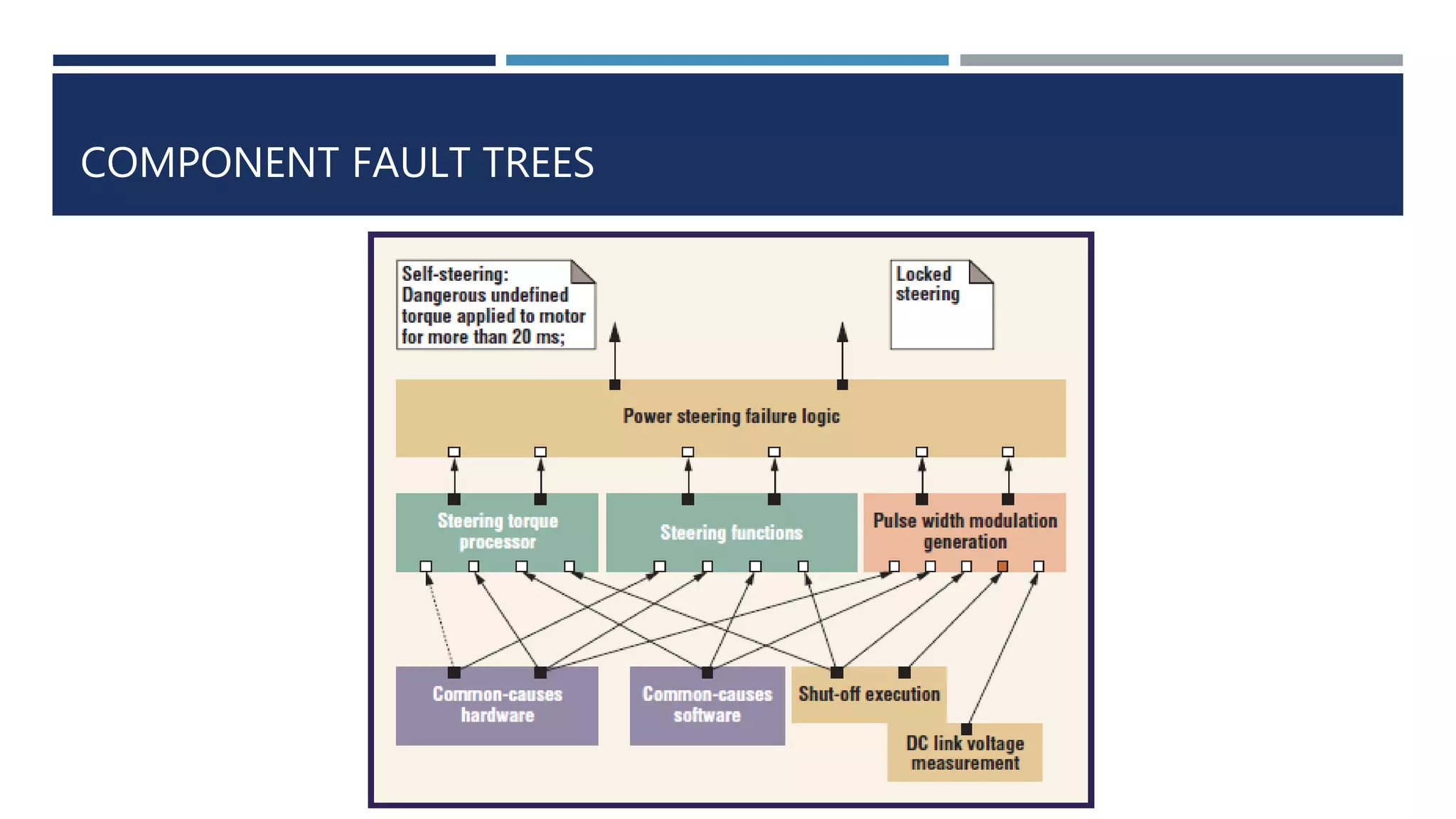

This document summarizes trends in embedded software engineering, including moving from traditional coding to model-driven engineering and domain-specific development. It also discusses quality assurance techniques for safety-critical systems, such as static and formal verification as well as dynamic testing. Model-based approaches like fault tree analysis and measurement-based reliability growth models are presented for safety and reliability analysis. Overall, the document outlines challenges in developing complex embedded systems and the need for continued advances in systematic engineering technologies.



































































