0% found this document useful (0 votes)
83 views3 pagesLTI Systems: Convolution & Analysis
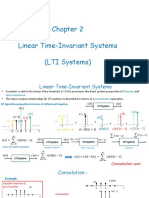
The document discusses time domain representation of linear time-invariant systems. It provides examples of convolution sums and impulse responses of cascaded and interconnected linear time-invariant systems. Students are asked to evaluate convolution sums, find impulse and step responses, and determine properties like causality and stability for different systems.
Uploaded by
Rohith GowdaCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
83 views3 pagesLTI Systems: Convolution & Analysis
The document discusses time domain representation of linear time-invariant systems. It provides examples of convolution sums and impulse responses of cascaded and interconnected linear time-invariant systems. Students are asked to evaluate convolution sums, find impulse and step responses, and determine properties like causality and stability for different systems.
Uploaded by
Rohith GowdaCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 3