3D computer graphics use three-dimensional representations of geometric data stored in a computer to render 2D images for later display or real-time viewing. This document discusses several 3D display methods in computer graphics including parallel projection, perspective projection, and depth cueing. Parallel projection projects points onto a plane along parallel lines, maintaining proportions but not producing realistic views. Perspective projection uses lines converging at a center point to give a more realistic impression of depth. Depth cueing varies the intensity of displayed objects based on distance to convey depth information.
3D display methodsin
computer graphics?
SUBMITTED BY :
ARAFAT AHMED TANZEER : 162-15-7895
2.
What is 3ddisplay methods in computer
graphics?
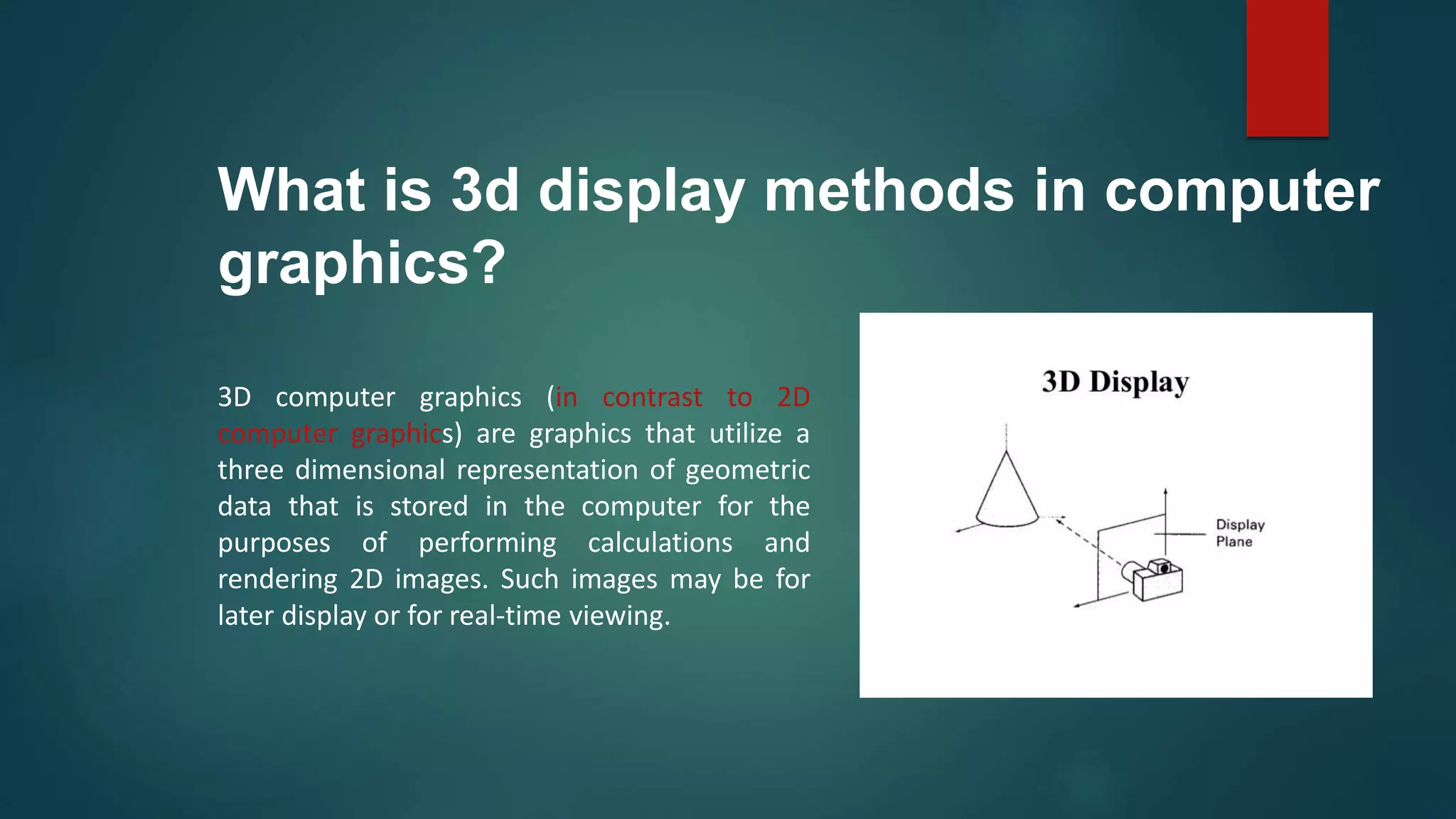
3D computer graphics (in contrast to 2D
computer graphics) are graphics that utilize a
three dimensional representation of geometric
data that is stored in the computer for the
purposes of performing calculations and
rendering 2D images. Such images may be for
later display or for real-time viewing.
3.
What we aregoing to talk about :
•Parallel Projection.
•Perspective Projection.
•Depth Cueing
4.
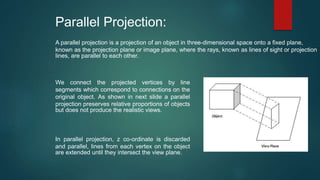
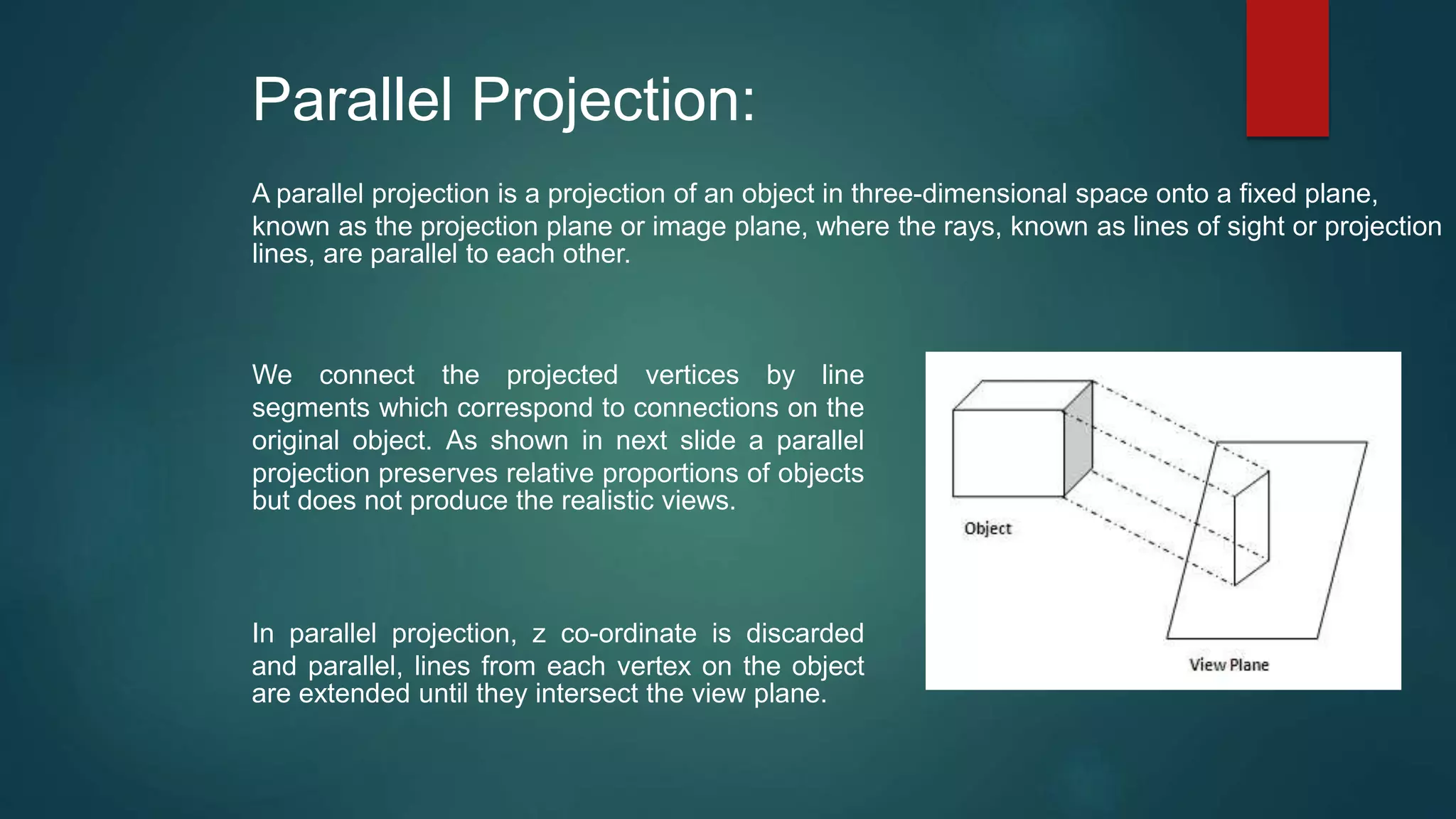
Parallel Projection:
A parallelprojection is a projection of an object in three-dimensional space onto a fixed plane,
known as the projection plane or image plane, where the rays, known as lines of sight or projection
lines, are parallel to each other.
In parallel projection, z co-ordinate is discarded
and parallel, lines from each vertex on the object
are extended until they intersect the view plane.
We connect the projected vertices by line
segments which correspond to connections on the
original object. As shown in next slide a parallel
projection preserves relative proportions of objects
but does not produce the realistic views.
5.
• Project pointson the object surface along parallel lines onto the display plane.
• Parallel lines are still parallel after projection.
• Used in engineering and architectural drawings.
• Views maintain relative proportions of the object.
Some points about Parallel Projection :
6.
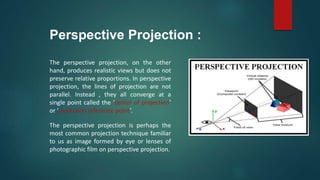
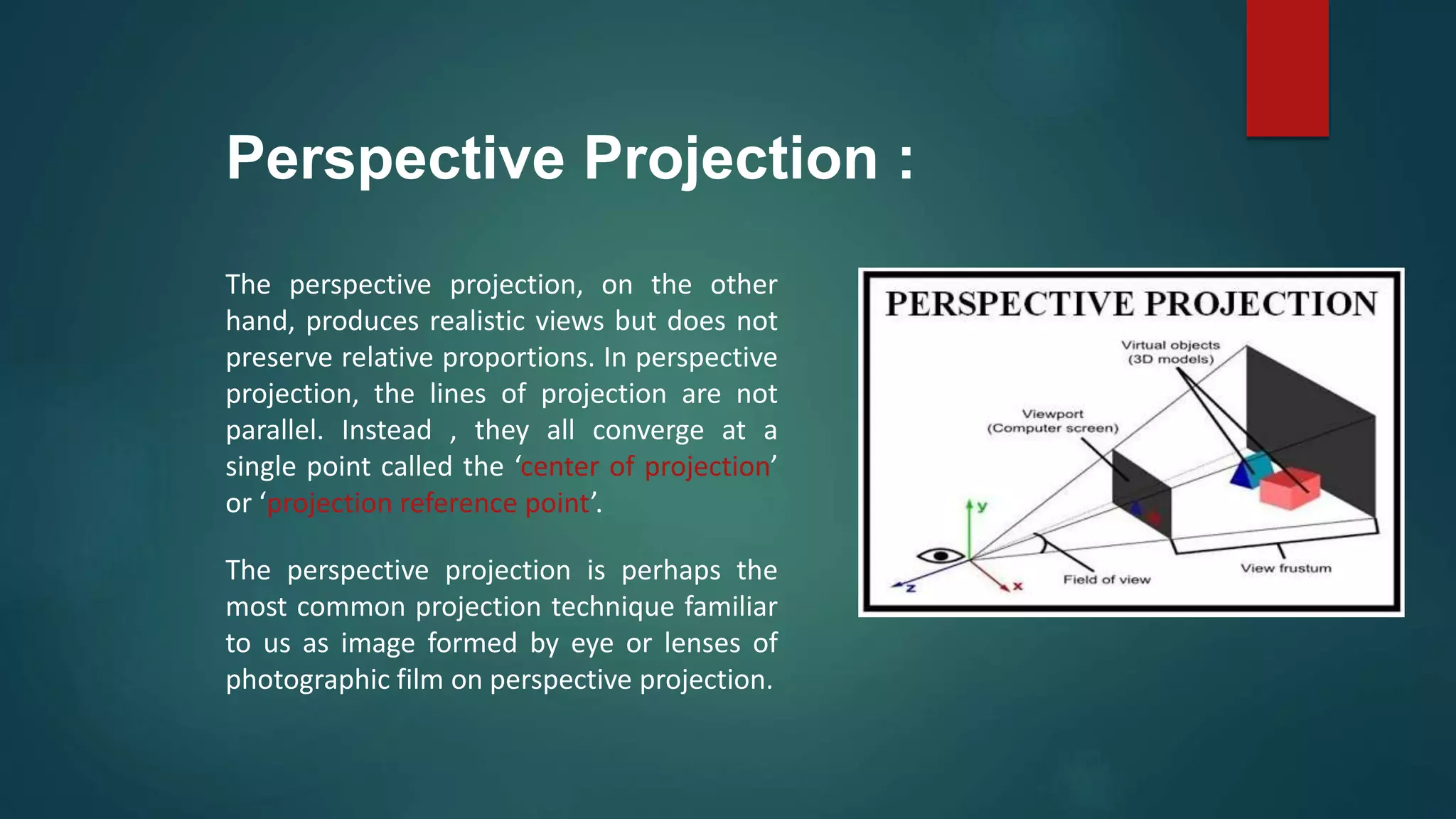
Perspective Projection :
Theperspective projection, on the other
hand, produces realistic views but does not
preserve relative proportions. In perspective
projection, the lines of projection are not
parallel. Instead , they all converge at a
single point called the ‘center of projection’
or ‘projection reference point’.
The perspective projection is perhaps the
most common projection technique familiar
to us as image formed by eye or lenses of
photographic film on perspective projection.
7.
The distance andangles are not preserved and parallel lines do not remain parallel.
Instead, they all converge at a single point called center of projection or projection
reference point. There are 3 types of perspective
projections:-
• One point perspective projection is simple to draw.
• Two point perspective projection gives better impression of depth.
• Three point perspective projection is most difficult to draw.
Projection reference point :
8.
The perspectiveprojection conveys depth information by making distance
object smalls than near one.
This is the way that our eyes and a camera lens form images and so the
displays are more realistic.
The disadvantage is that if object have only limited variation , the image may
not provide adequate depth information and ambiguity appears.
Some points about Perspective Projection :
9.
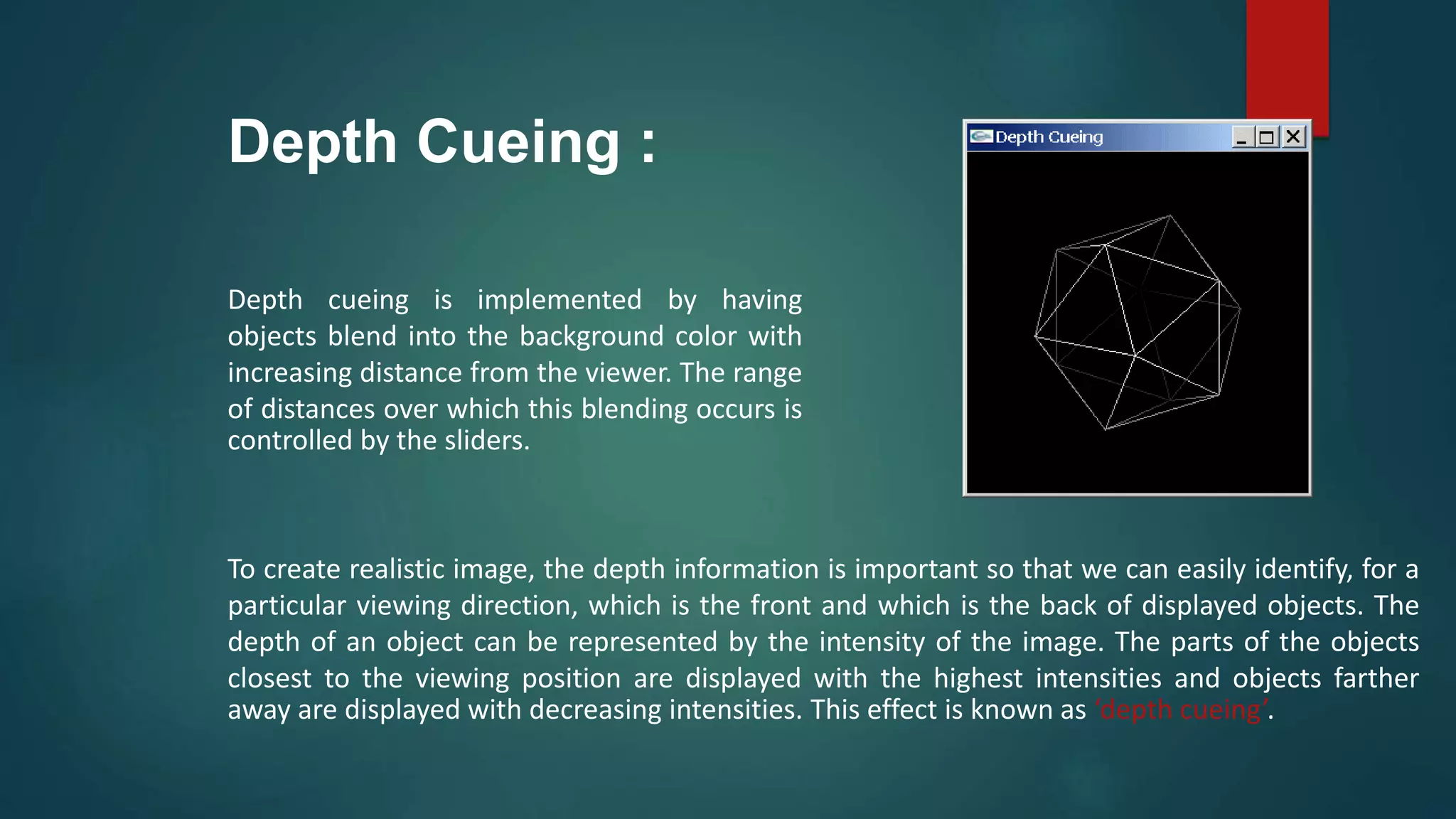
Depth Cueing :
Depthcueing is implemented by having
objects blend into the background color with
increasing distance from the viewer. The range
of distances over which this blending occurs is
controlled by the sliders.
To create realistic image, the depth information is important so that we can easily identify, for a
particular viewing direction, which is the front and which is the back of displayed objects. The
depth of an object can be represented by the intensity of the image. The parts of the objects
closest to the viewing position are displayed with the highest intensities and objects farther
away are displayed with decreasing intensities. This effect is known as ‘depth cueing’.
10.
• To easilyidentify the front and back of display objects.
• Depth information can be included using various methods.
• A simple method to vary the intensity of objects according to their distance from
the viewing position.
• Eg: lines closest to the viewing position are displayed with the higher intensities
and lines farther away are displayed with lower intensities.
Some points about Depth Cueing :
11.
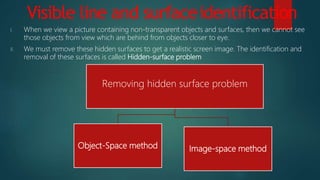
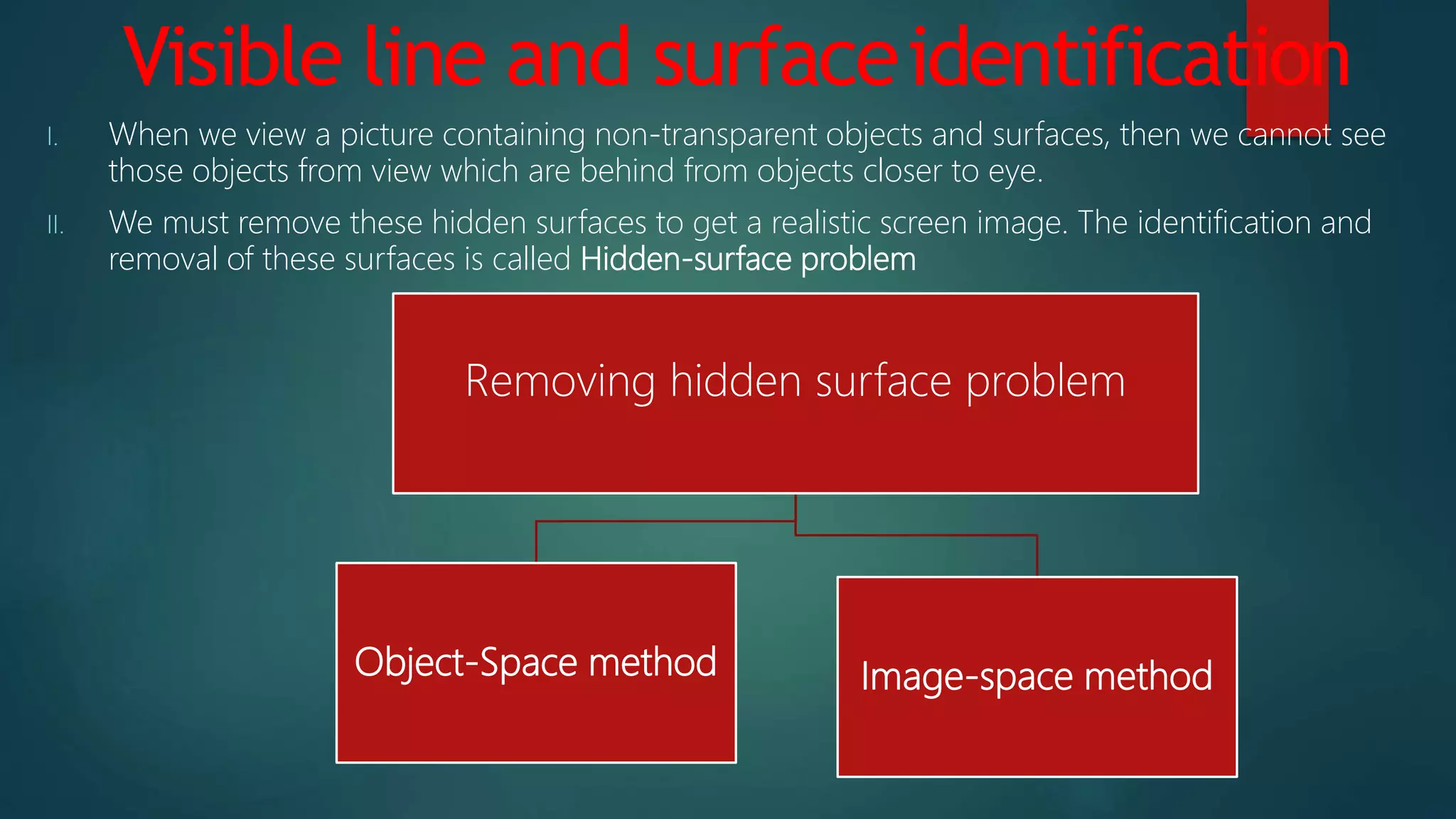
Visible line andsurfaceidentification
I. When we view a picture containing non-transparent objects and surfaces, then we cannot see
those objects from view which are behind from objects closer to eye.
II. We must remove these hidden surfaces to get a realistic screen image. The identification and
removal of these surfaces is called Hidden-surface problem
Removing hidden surface problem
Object-Space method Image-space method
12.
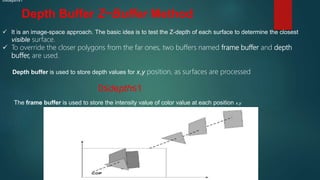
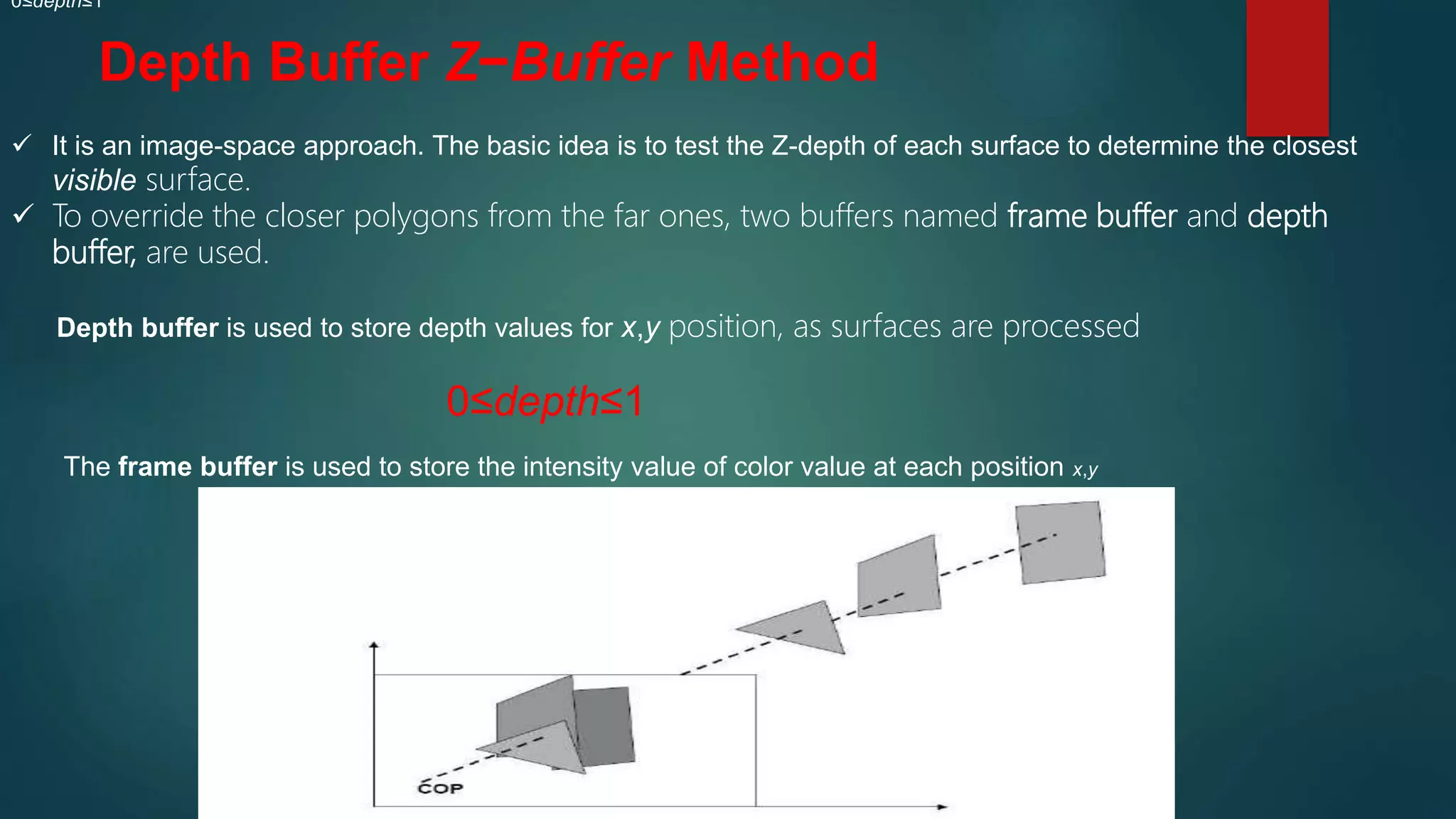
Depth Buffer Z−BufferMethod
It is an image-space approach. The basic idea is to test the Z-depth of each surface to determine the closest
visible surface.
To override the closer polygons from the far ones, two buffers named frame buffer and depth
buffer, are used.
Depth buffer is used to store depth values for x,y position, as surfaces are processed
0≤depth≤1
0≤depth≤1
The frame buffer is used to store the intensity value of color value at each position x,y
13.
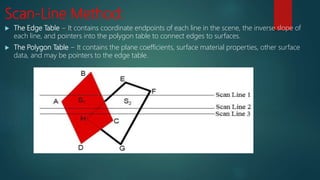
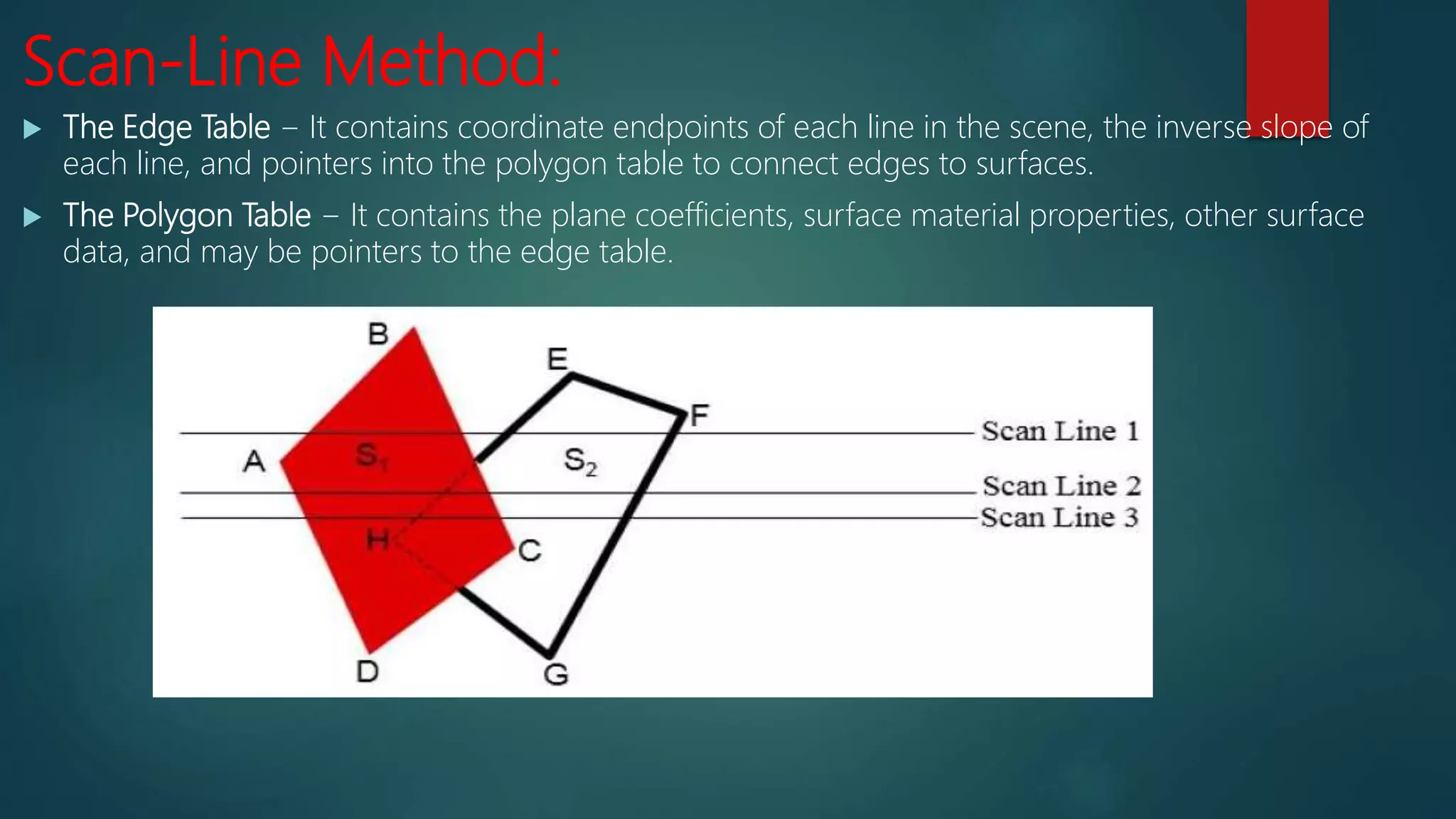
Scan-Line Method:
TheEdge Table − It contains coordinate endpoints of each line in the scene, the inverse slope of
each line, and pointers into the polygon table to connect edges to surfaces.
The Polygon Table − It contains the plane coefficients, surface material properties, other surface
data, and may be pointers to the edge table.
14.
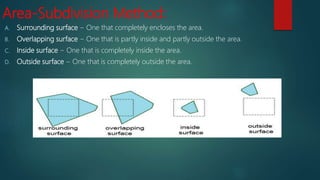
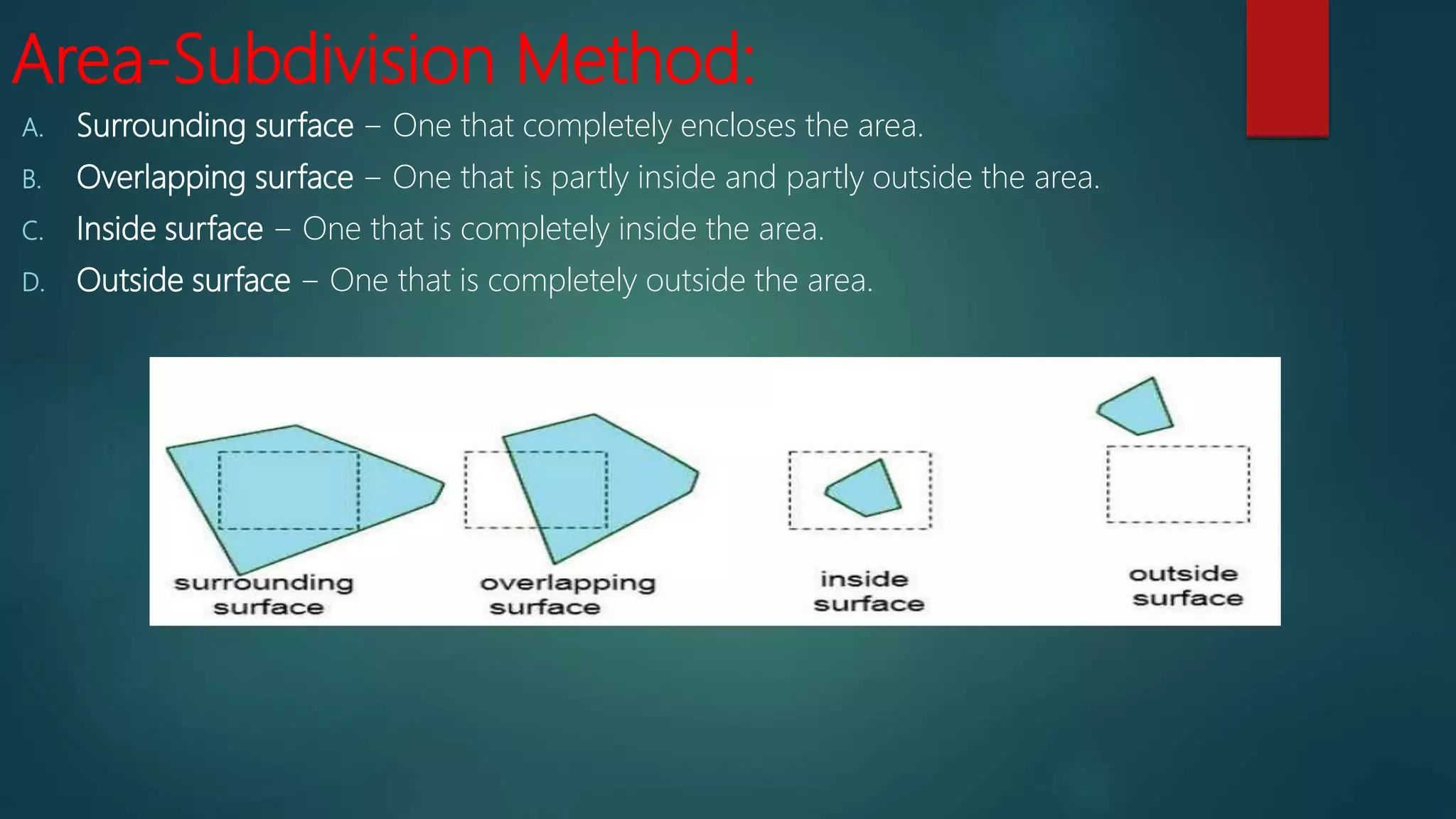
Area-Subdivision Method:
A. Surroundingsurface − One that completely encloses the area.
B. Overlapping surface − One that is partly inside and partly outside the area.
C. Inside surface − One that is completely inside the area.
D. Outside surface − One that is completely outside the area.
15.
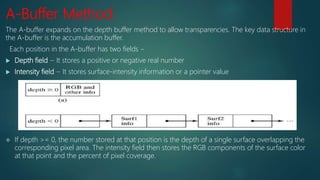
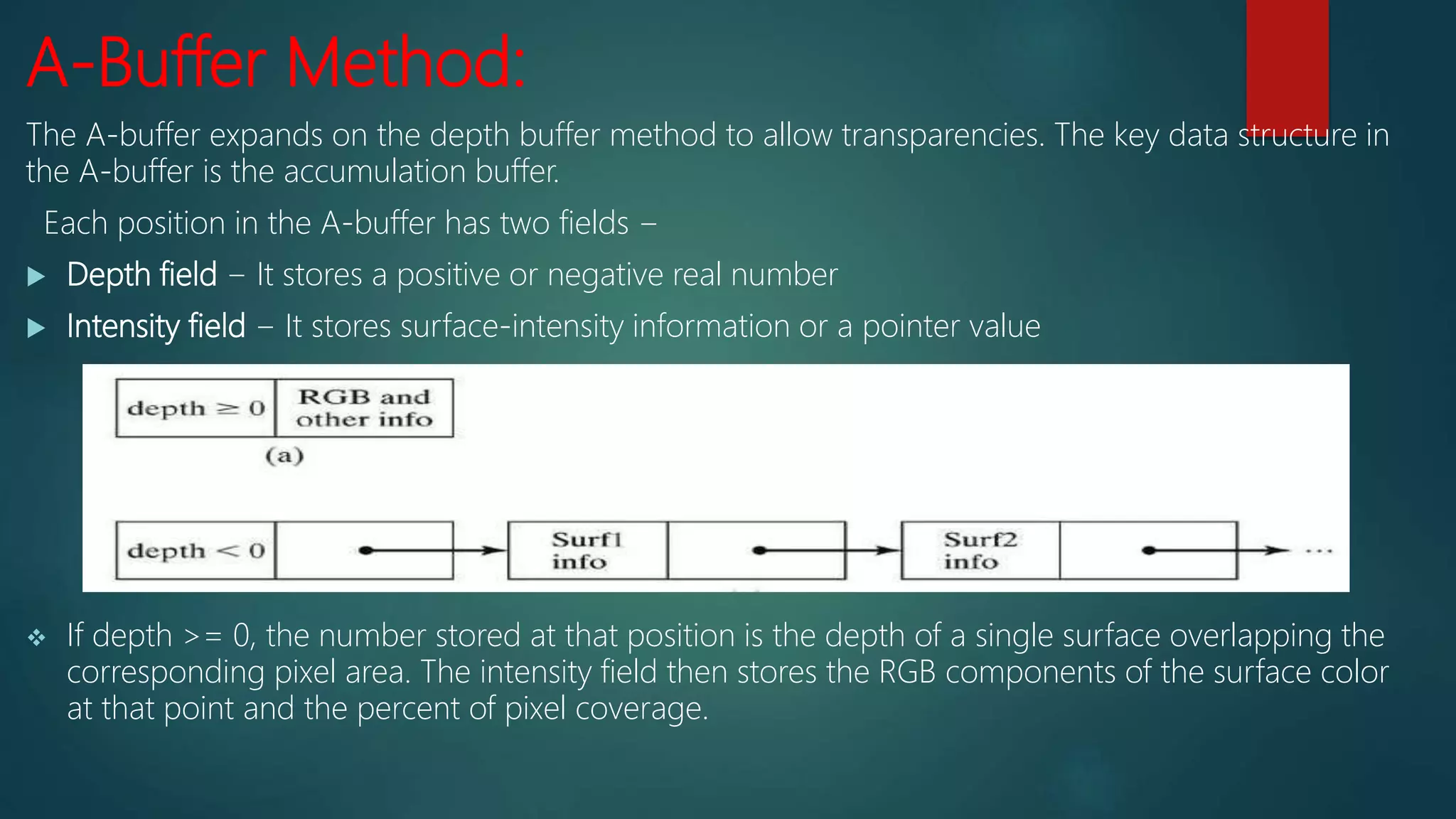
A-Buffer Method:
The A-bufferexpands on the depth buffer method to allow transparencies. The key data structure in
the A-buffer is the accumulation buffer.
Each position in the A-buffer has two fields −
Depth field − It stores a positive or negative real number
Intensity field − It stores surface-intensity information or a pointer value
If depth >= 0, the number stored at that position is the depth of a single surface overlapping the
corresponding pixel area. The intensity field then stores the RGB components of the surface color
at that point and the percent of pixel coverage.
16.
If depth <0, it indicates multiple-surface contributions to the pixel intensity. The intensity field then
stores a pointer to a linked list of surface data. The surface buffer in the A-buffer includes −
RGB intensity components
Opacity Parameter
Depth
Percent of area coverage
Surface identifier
17.
Surface Rendering:
Surfacerendering involves setting the surface intensity of objects according to the lighting
conditions in the scene and according to assigned surface characteristics. The lighting
conditions specify the intensity and positions of light sources and the general background
illumination required for ascene.
Onthe other hand the surface characteristics of objects specify the degree of transparency
and smoothness or roughness of the surface; usually the surface rendering methods are
combined with perspective and visible surface identification to generate a high degree of
realismin a displayedscene.
18.
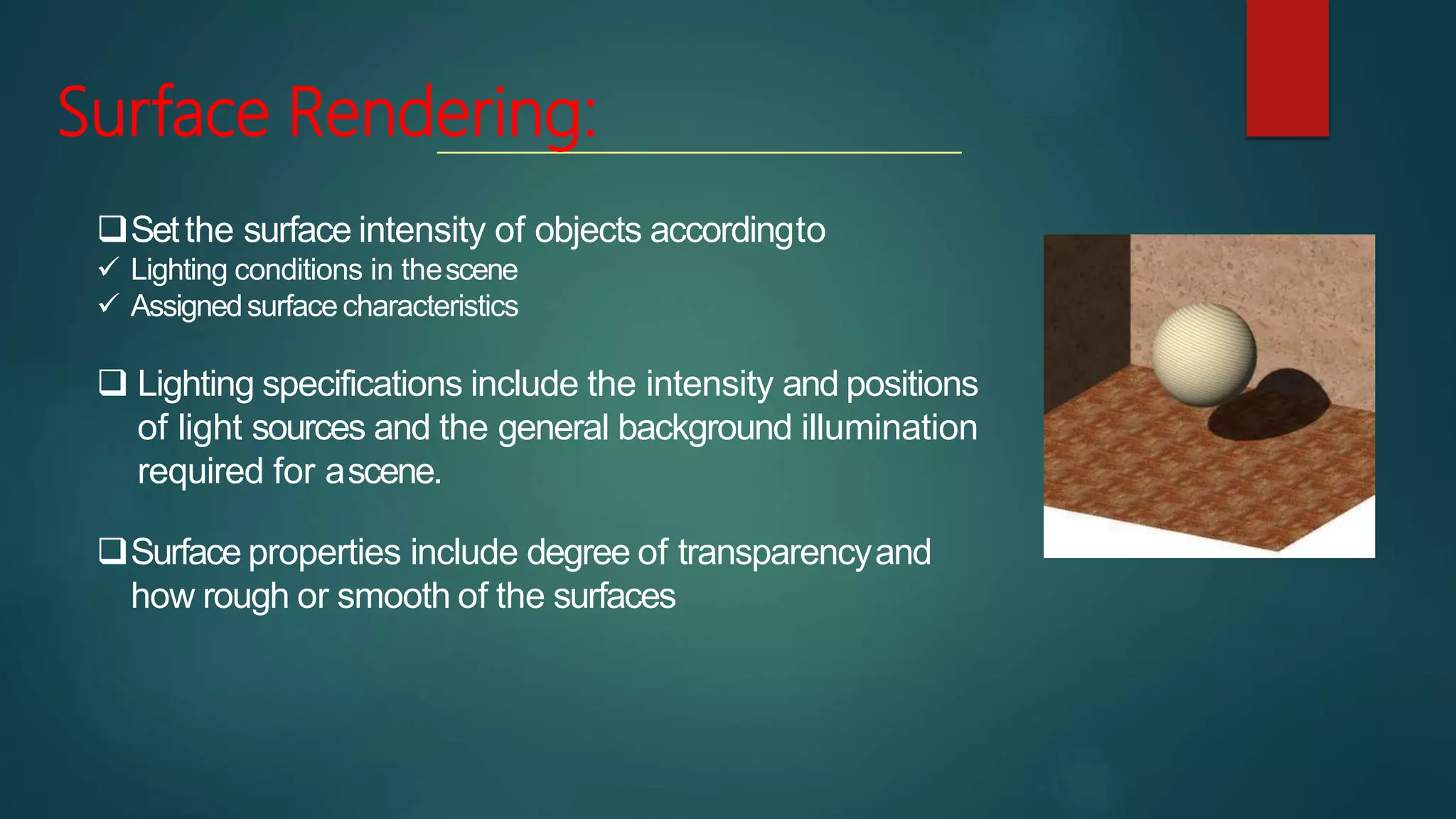
Surface Rendering:
Setthe surfaceintensity of objects accordingto
Lighting conditions in thescene
Assignedsurfacecharacteristics
Lighting specifications include the intensity and positions
of light sources and the general background illumination
required for ascene.
Surface properties include degree of transparencyand
how rough or smooth of the surfaces