contents
1. 아두이노(ARDUINO)
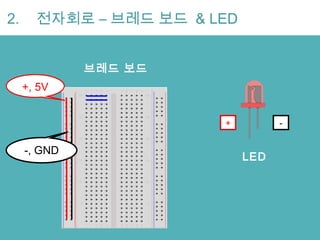
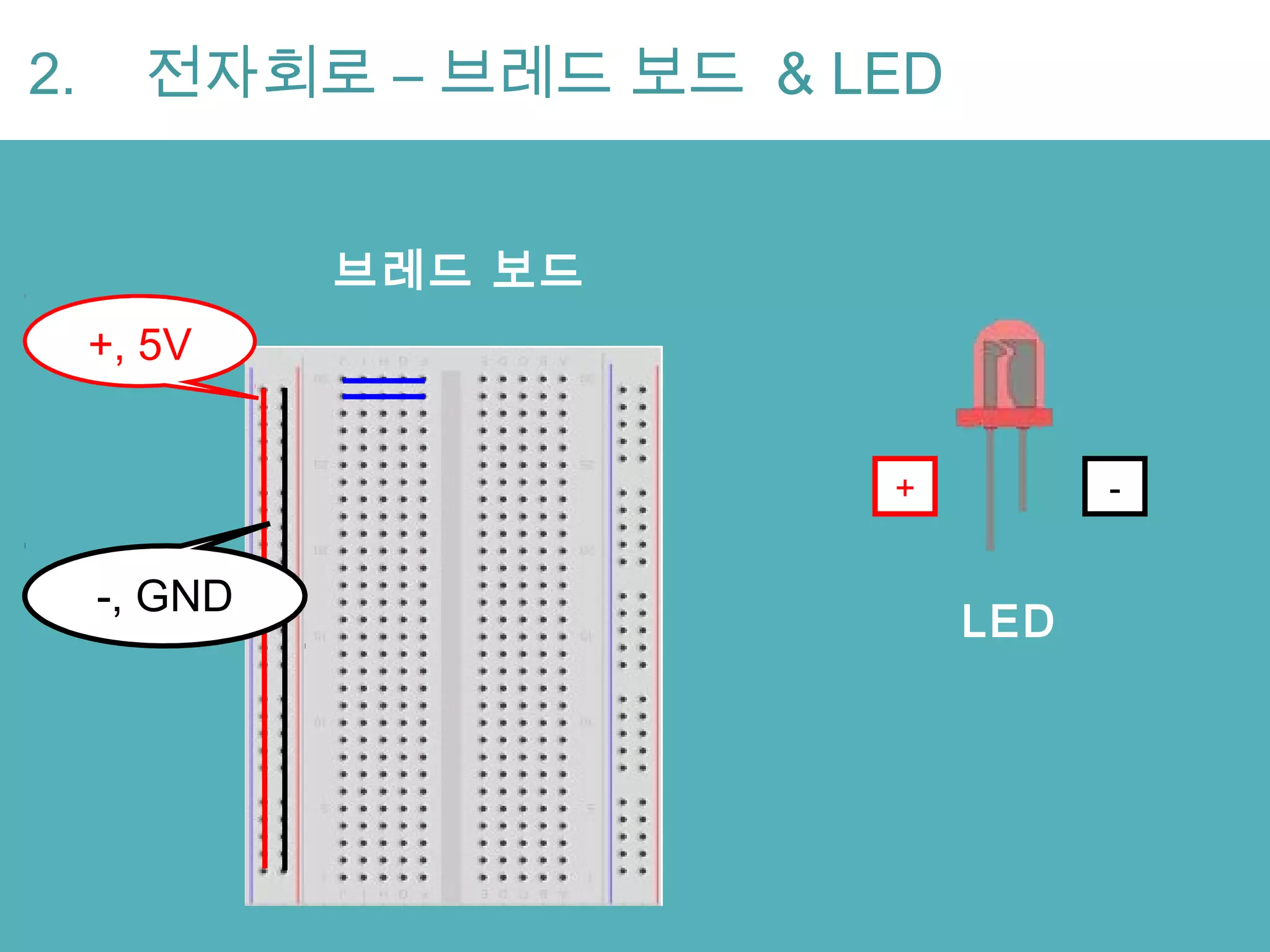
2. 전자회로
3. 아두이노 ARDUINO
함수
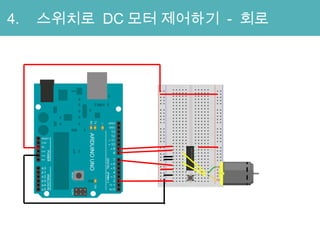
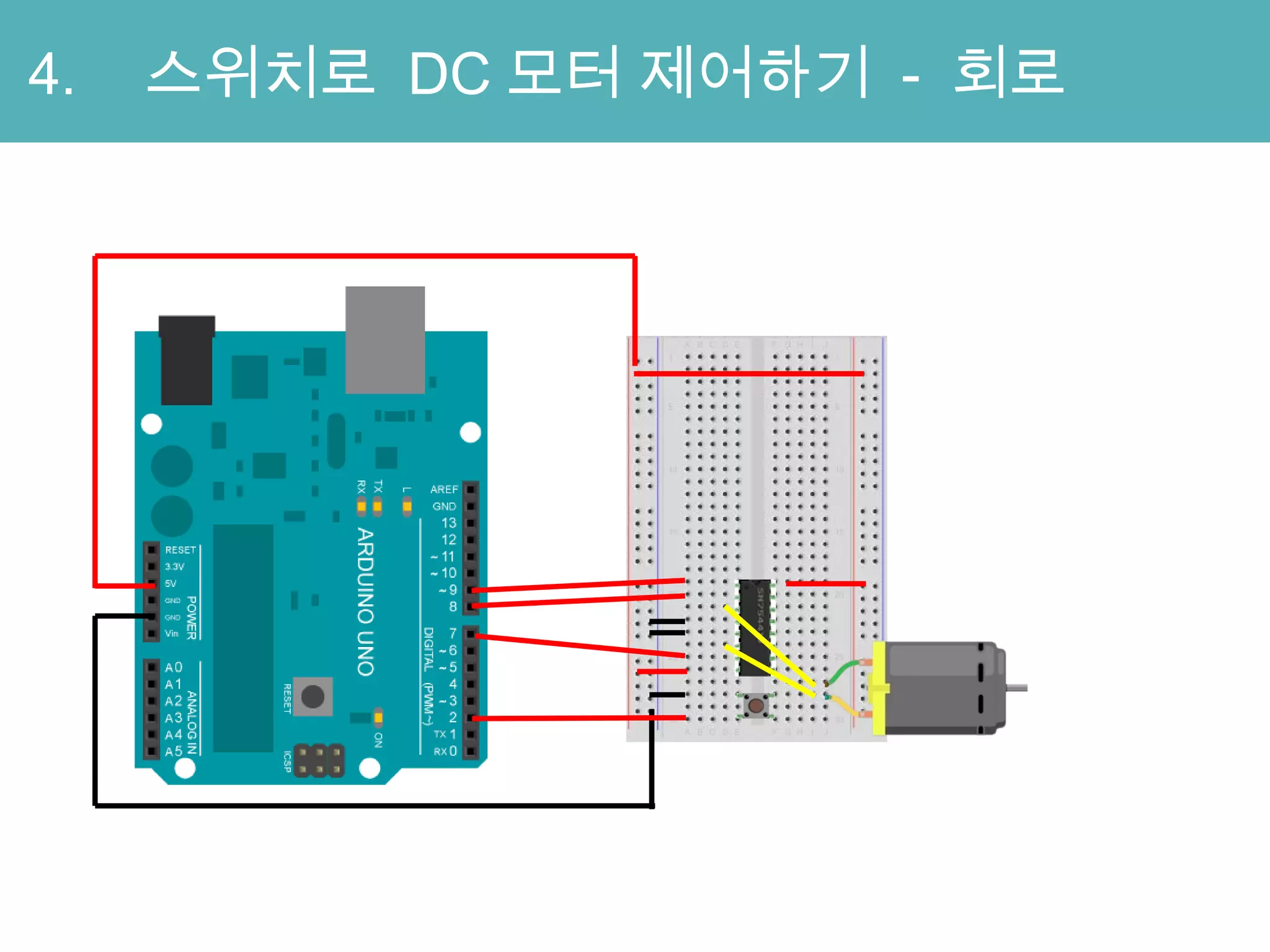
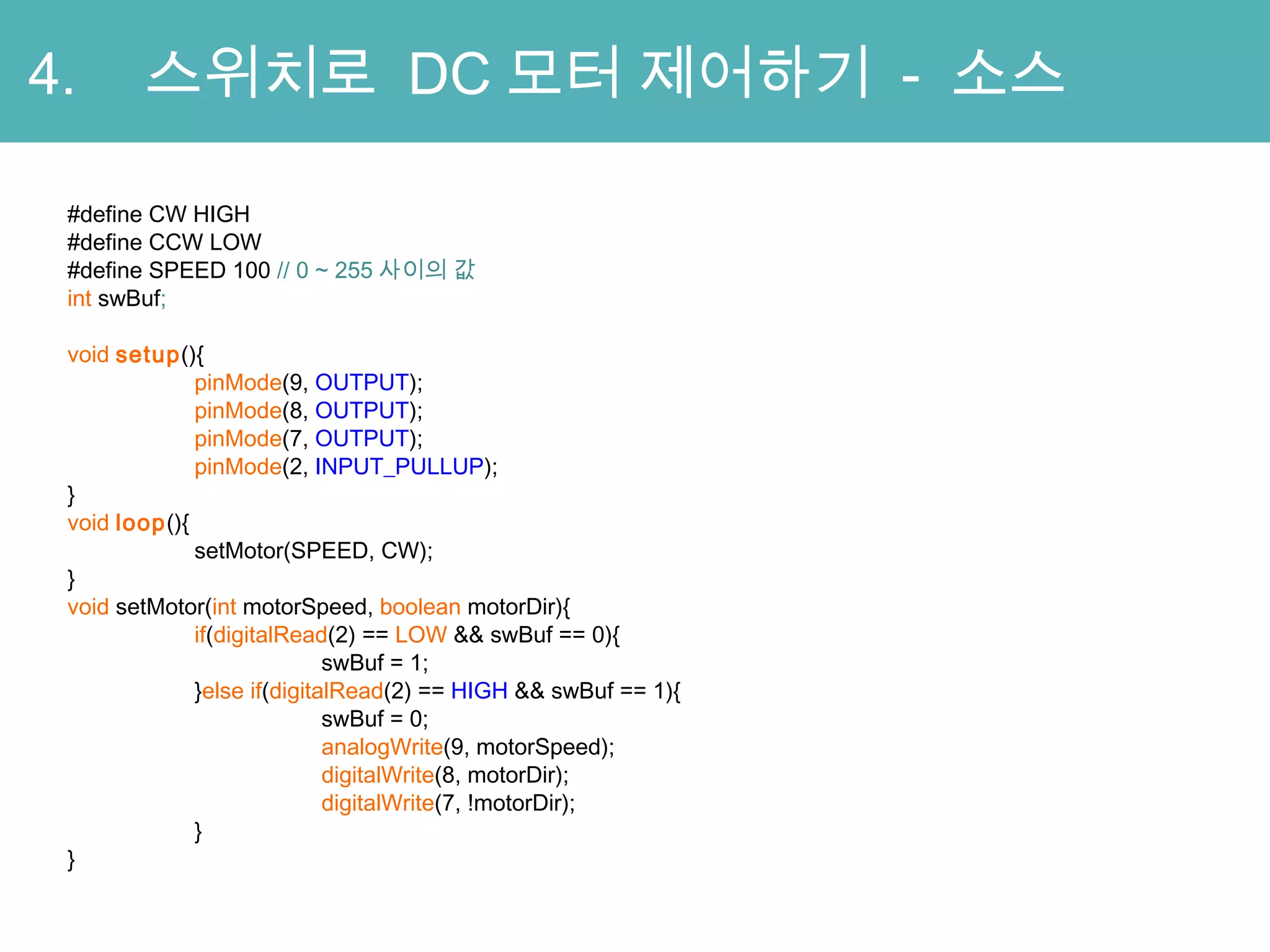
4. 스위치로 DC 모터 제어
3.
1. 아두이노(ARDUINO)
Arduino( 아두이노 ) 는 오픈소스 기반의 피지컬
컴퓨터 플래폼
하드웨어 소프트웨어
Arduino Uno
+
Arduino IDE
4.
1. 아두이노(ARDUINO) -하드웨어
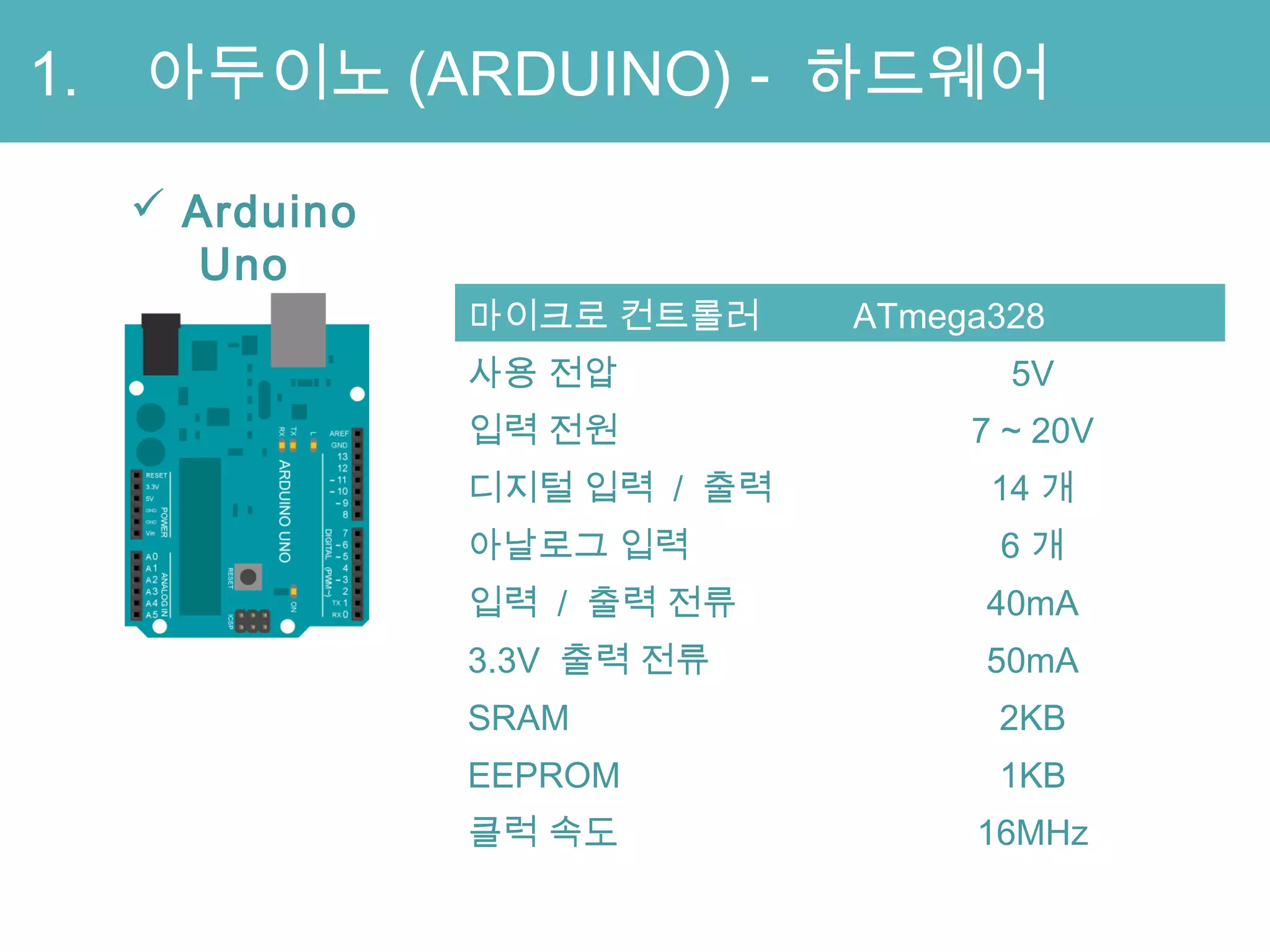
Arduino
Uno
마이크로 컨트롤러 ATmega328
사용 전압 5V
입력 전원 7 ~ 20V
디지털 입력 / 출력 14 개
아날로그 입력 6 개
입력 / 출력 전류 40mA
3.3V 출력 전류 50mA
SRAM 2KB
EEPROM 1KB
클럭 속도 16MHz
5.
1. 아두이노(ARDUINO) -하드웨어
Arduino
Uno
디지털 입/출력 핀
아날로그 입력 핀
USB 포트
전원 핀
아날로그 출력 핀 ~표시
6.
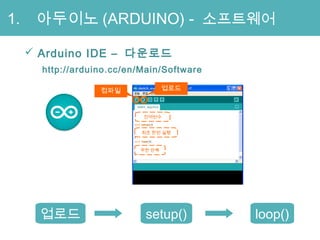
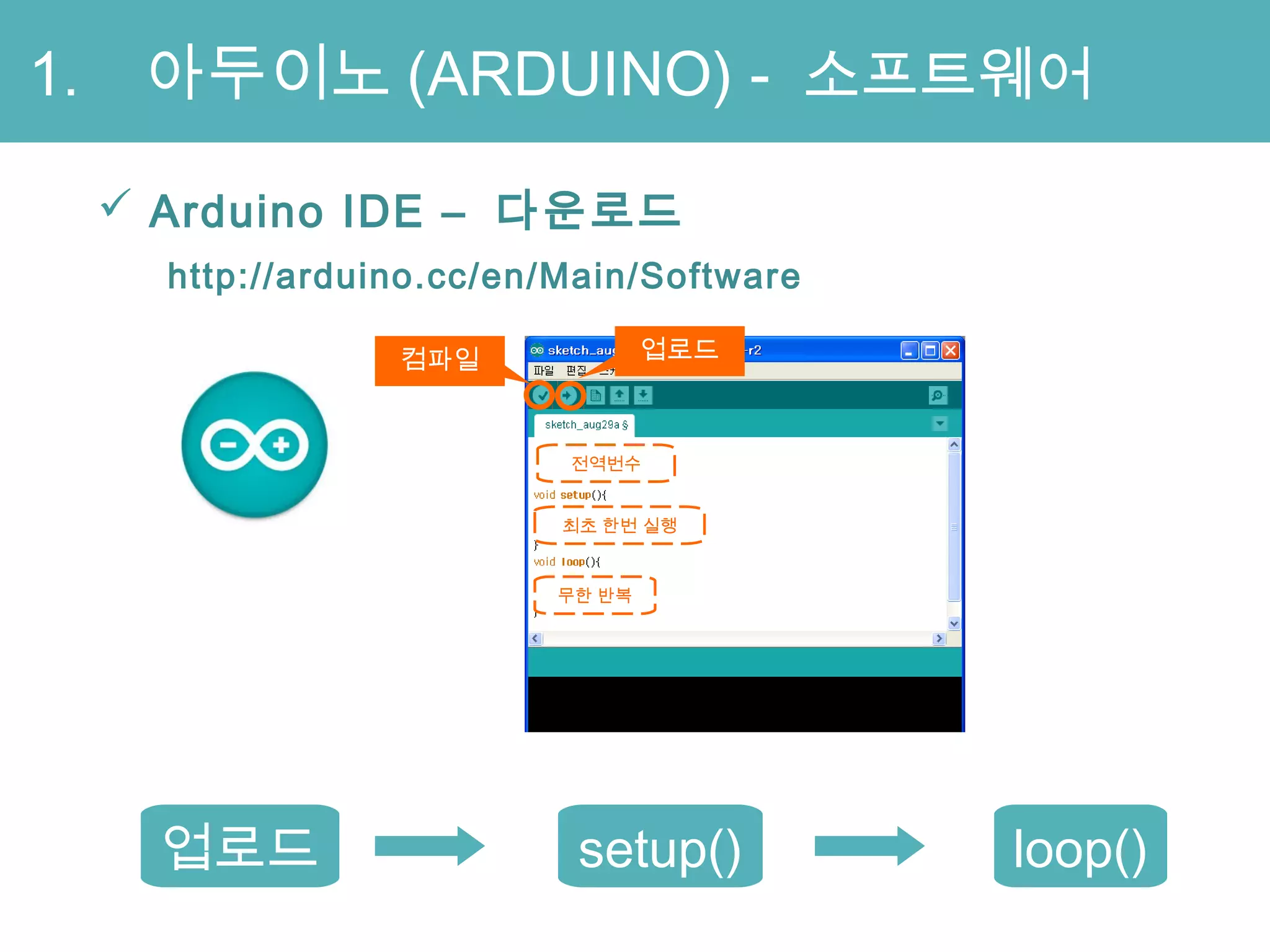
1. 아두이노(ARDUINO) -소프트웨어
Arduino IDE – 다운로드
http://arduino.cc/en/Main/Software
컴파일 업로드
전역번수
최초 한번 실행
무한 반복
업로드 setup() loop()
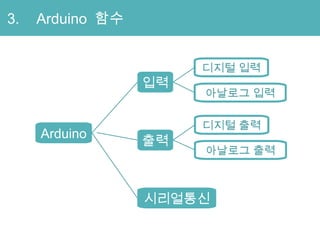
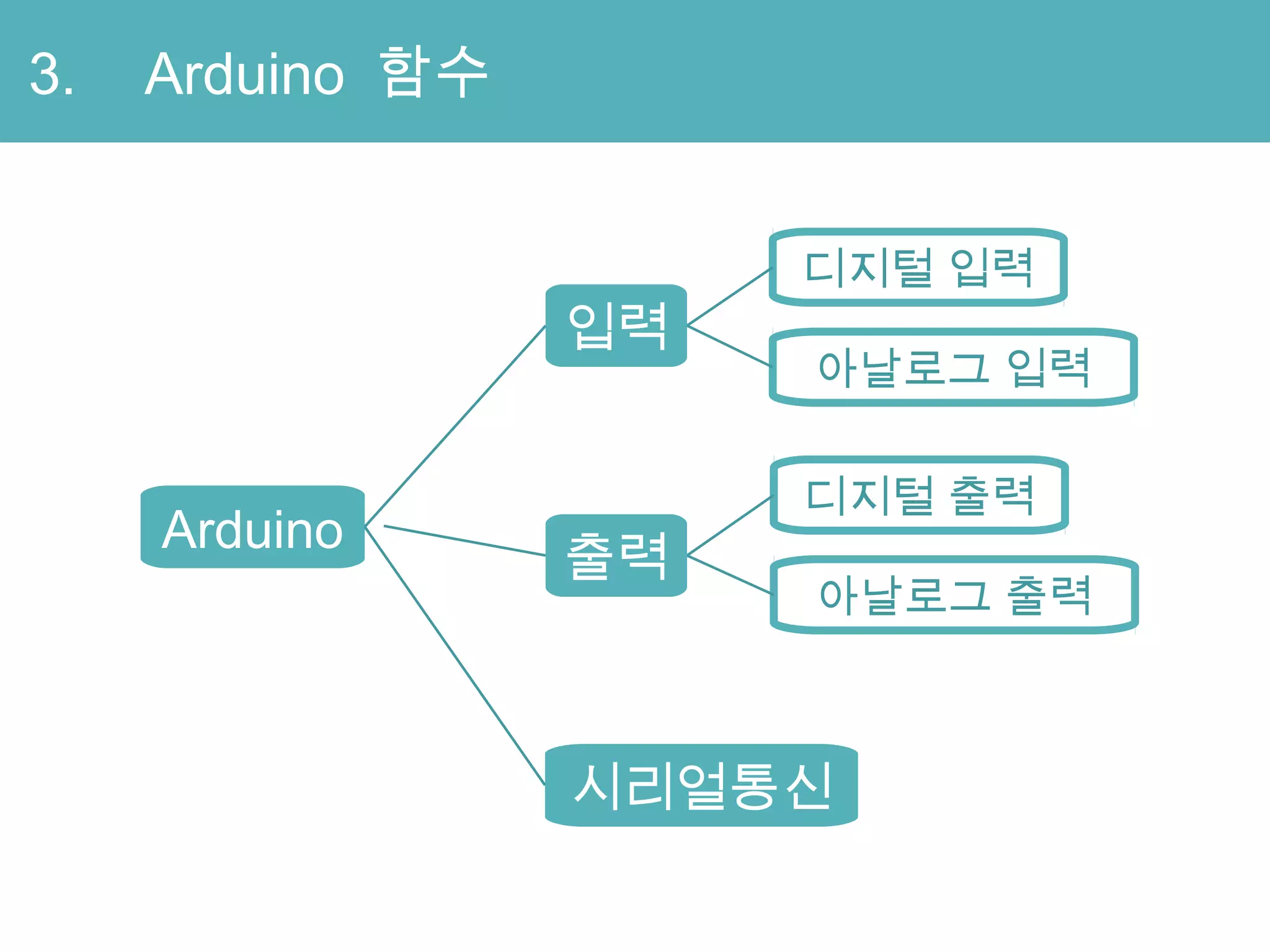
3. Arduino 함수
Arduino
입력
출력
디지털 입력
아날로그 입력
디지털 출력
아날로그 출력
시리얼통신
9.
3. Arduino 함수
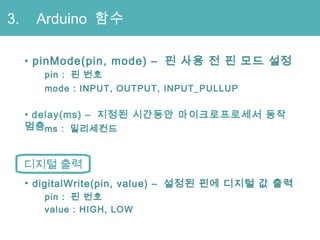
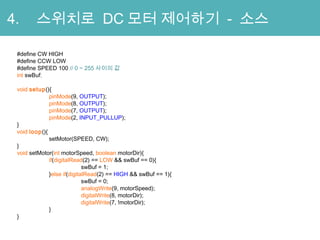
• pinMode(pin, mode) – 핀 사용 전 핀 모드 설정
pin : 핀 번호
mode : INPUT, OUTPUT, INPUT_PULLUP
• delay(ms) – 지정된 시간동안 마이크로프로세서 동작
멈춤ms : 밀리세컨드
디지털 출력
• digitalWrite(pin, value) – 설정된 핀에 디지털 값 출력
pin : 핀 번호
value : HIGH, LOW
10.
3. Arduino 함수
디지털 입력
• digitalRead(pin) – 설정된 핀에 디지털 값을 읽음
pin : 핀 번호
아날로그 입력
• analogRead(pin) – 설정된 핀에 0 ~ 1023 값을 읽음
pin : 핀 번호
아날로그 출력
• analogWrite(pin, val) – 출력핀에 값을 출력
pin : 핀 번호
val : 출력값 0 ~ 255
11.
3. Arduino 함수
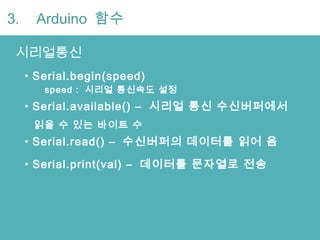
시리얼통신
• Serial.begin(speed)
speed : 시리얼 통신속도 설정
• Serial.available() – 시리얼 통신 수신버퍼에서
읽을 수 있는 바이트 수
• Serial.read() – 수신버퍼의 데이터를 읽어 옴
• Serial.print(val) – 데이터를 문자열로 전송
12.
3. Arduino 함수
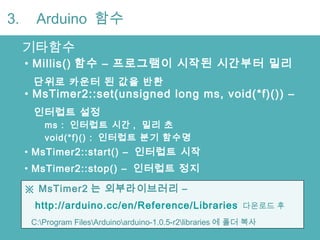
기타함수
• Millis() 함수 – 프로그램이 시작된 시간부터 밀리
단위로 카운터 된 값을 반환
• MsTimer2::set(unsigned long ms, void(*f)()) –
인터럽트 설정
ms : 인터럽트 시간 , 밀리 초
void(*f)() : 인터럽트 분기 함수명
• MsTimer2::start() – 인터럽트 시작
• MsTimer2::stop() – 인터럽트 정지
※ MsTimer2 는 외부라이브러리 –
http://arduino.cc/en/Reference/Libraries 다운로드 후
C:Program FilesArduinoarduino-1.0.5-r2libraries 에 폴더 복사

















![[2] 아두이노 활용 실습](https://cdn.slidesharecdn.com/ss_thumbnails/2-160816180520-thumbnail.jpg?width=600ounds&width=560&fit=bounds)






![[실습편] 하드웨어에 생명을 주는 아두이노](https://cdn.slidesharecdn.com/ss_thumbnails/20150826-151005032451-lva1-app6892-thumbnail.jpg?width=600ounds&width=560&fit=bounds)



![광운대[바람] 1.vhdl intro](https://cdn.slidesharecdn.com/ss_thumbnails/1-150729164828-lva1-app6892-thumbnail.jpg?width=600ounds&width=560&fit=bounds)





















![[3] 프로세싱과 아두이노](https://cdn.slidesharecdn.com/ss_thumbnails/2-160411181828-thumbnail.jpg?width=600ounds&width=560&fit=bounds)








![[엄마정치 메이커팀] 첫 만남](https://cdn.slidesharecdn.com/ss_thumbnails/random-171210000428-thumbnail.jpg?width=600ounds&width=560&fit=bounds)
![[엄마정치 메이커팀] 두번째 모임_2018_01_27](https://cdn.slidesharecdn.com/ss_thumbnails/random-180129042735-thumbnail.jpg?width=600ounds&width=560&fit=bounds)


![[아두이노 워크샵 1차] 아두이노 소개 / LED / 피에조 부저 / 버튼](https://cdn.slidesharecdn.com/ss_thumbnails/1pdf-161224052608-thumbnail.jpg?width=600ounds&width=560&fit=bounds)












