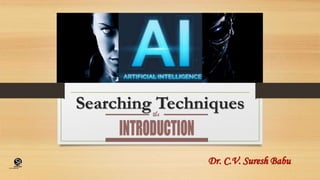
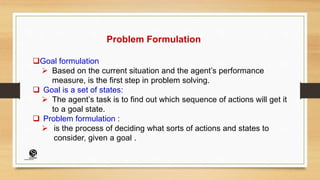


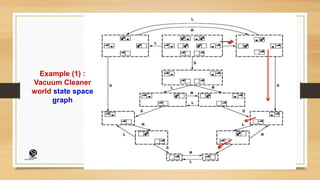
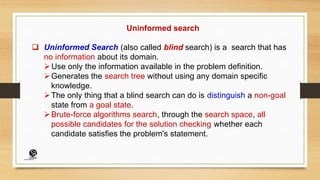
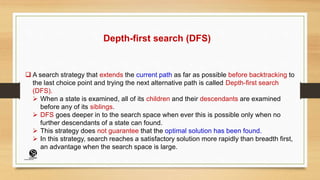
![Example (1) : Vacuum Cleaner world state space
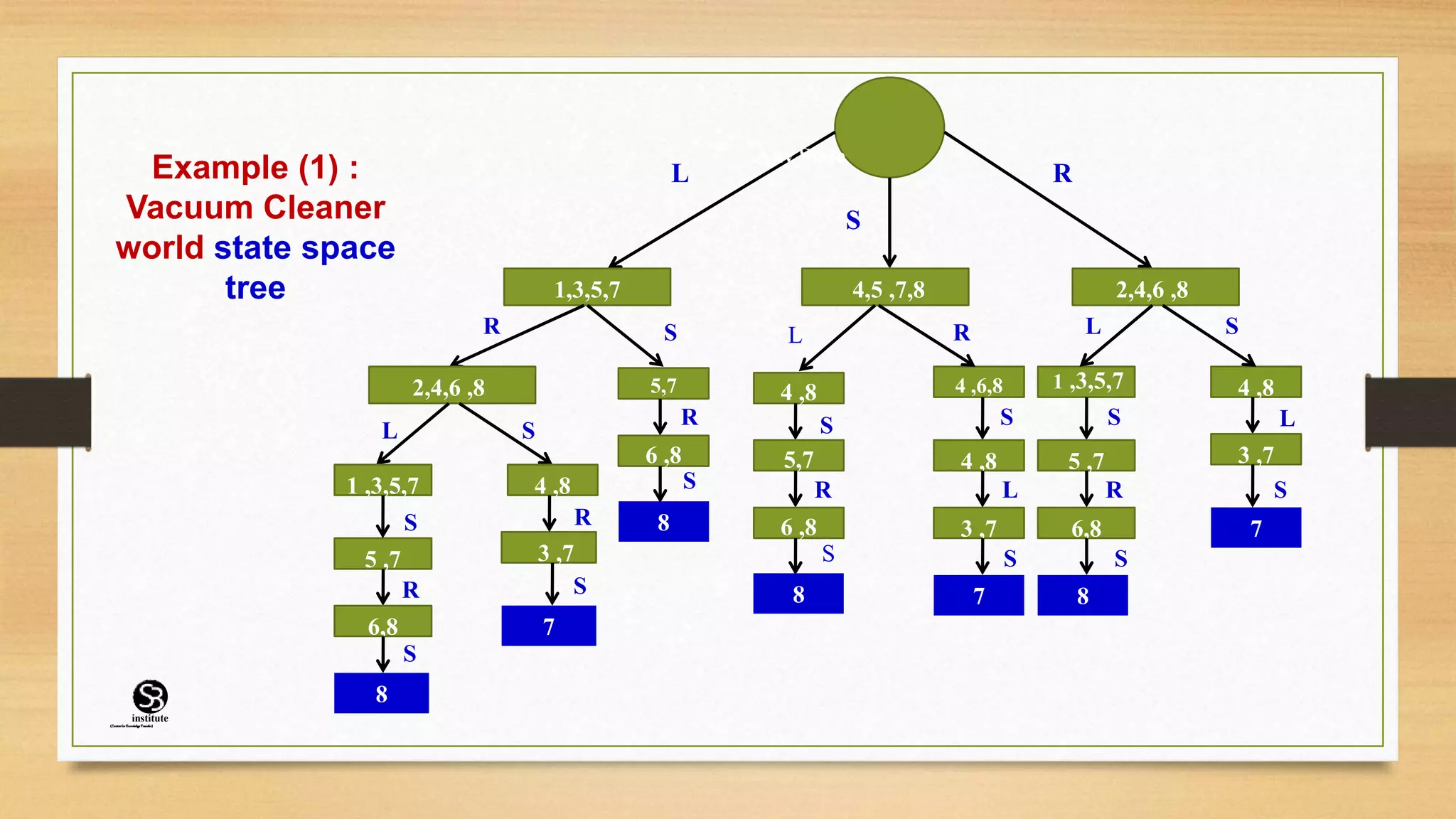
Observable, start in #5.
Solution? [Right , Suck]
Observable, start in #2.
Solution? [Suck , Left , Suck]
Observable, start in #6.
Solution? [Suck , Left]
Observable, start in #1.
Solution? [Suck , Right , Suck]
Unobservable, start in {1,2,3,4,5,6,7,8}
Solution? [Right , Suck , Left , Suck]
(CentreforKnowledgeTransfer)
institute](https://image.slidesharecdn.com/2-210731075225/85/Artificial-Intelligence-Searching-Techniques-19-320.jpg)


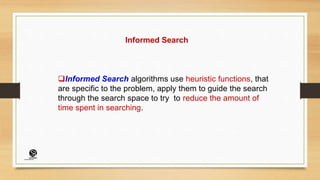

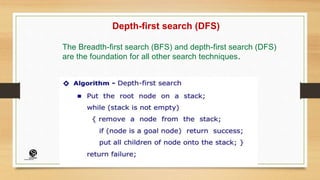
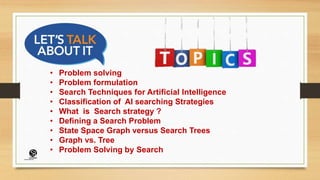
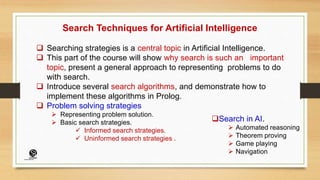
![Example (1) : Vacuum Cleaner world state space
Observable, start in #5.
Solution? [Right , Suck]
Observable, start in #2.
Solution? [Suck , Left , Suck]
Observable, start in #6.
Solution? [Suck , Left]
Observable, start in #1.
Solution? [Suck , Right , Suck]
Unobservable, start in {1,2,3,4,5,6,7,8}
Solution? [Right , Suck , Left , Suck]
(CentreforKnowledgeTransfer)
institute](https://image.slidesharecdn.com/2-210731075225/75/Artificial-Intelligence-Searching-Techniques-19-2048.jpg)


The document discusses various search techniques in artificial intelligence, including problem formulation, state space graphs, and search strategies such as uninformed (depth-first and breadth-first search) and informed searches (heuristic methods). It elaborates on the importance of defining search problems, representing problem states, and provides examples such as puzzle-solving and route planning. Executing algorithms in Prolog to implement these strategies is also emphasized, showcasing practical applications of searching in AI.
Introduction of search techniques and problem formulation in AI. Discusses state space, search trees, and AI strategies.
Focus on problem formalization and goal formulation. Explains strategies in AI searches and the representation of problems.
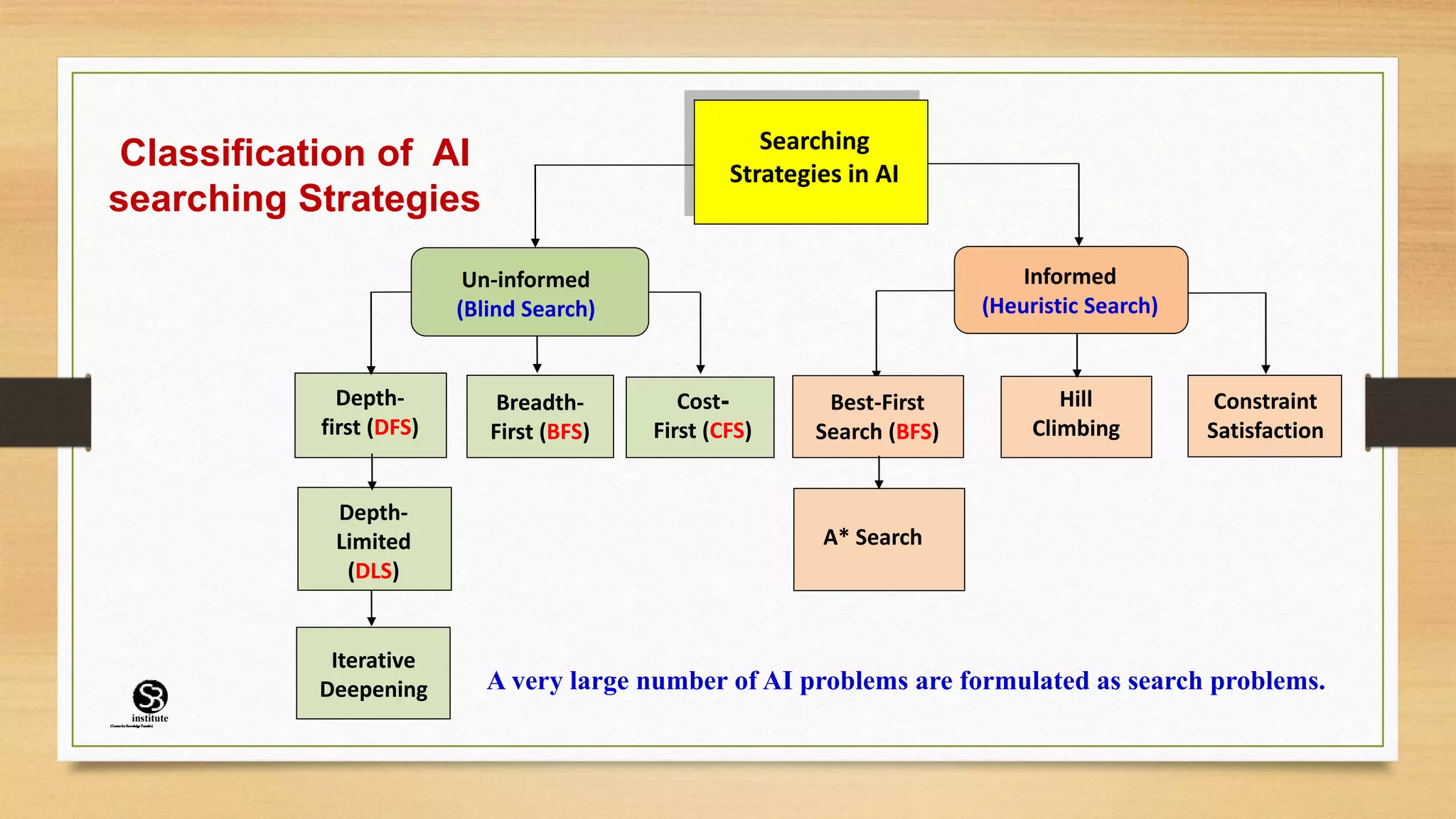
Overview of search strategies in AI. Discusses both uninformed and informed searching techniques.
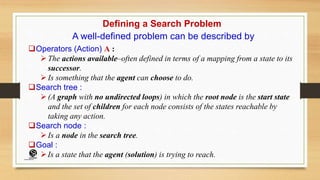
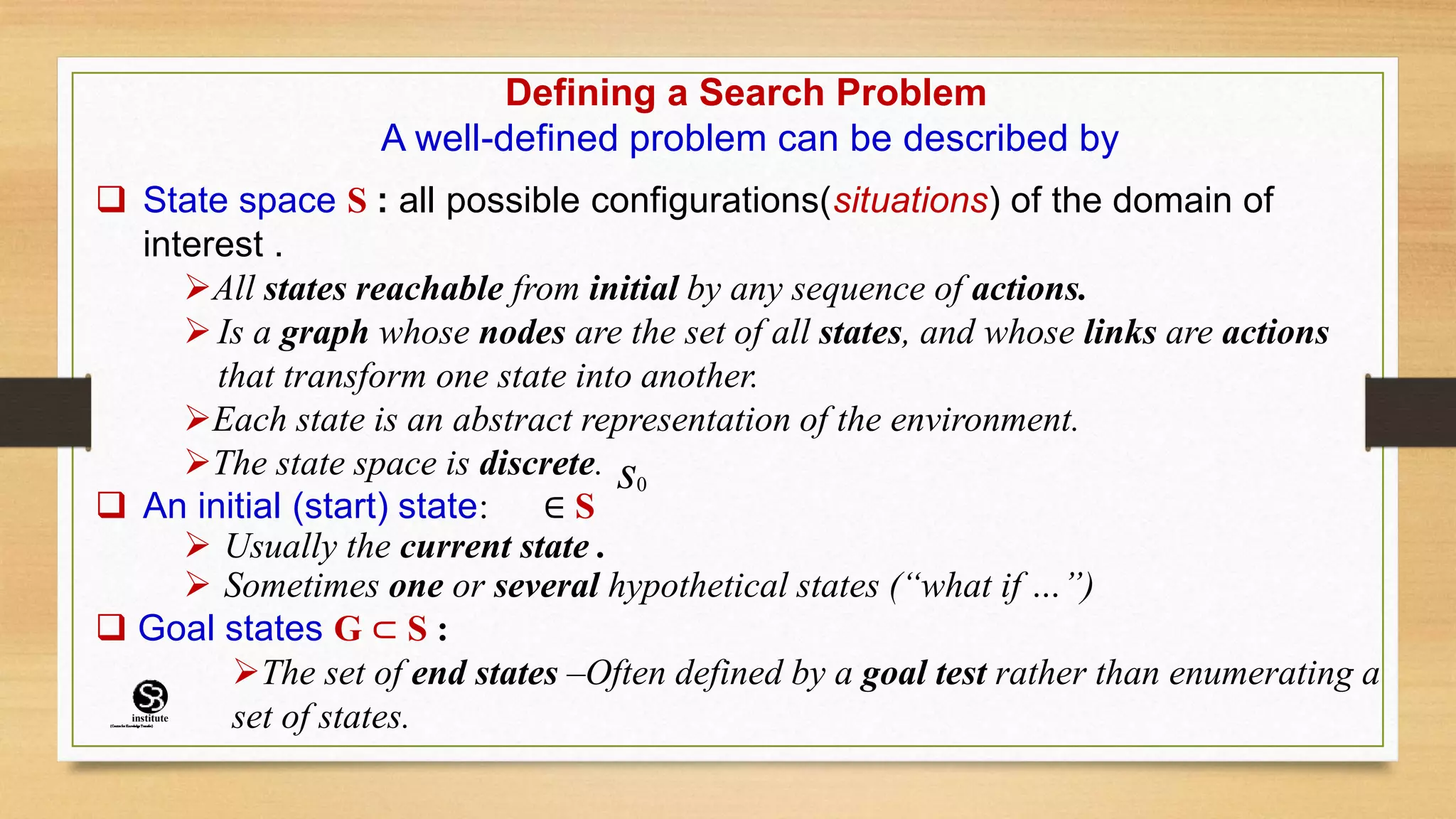
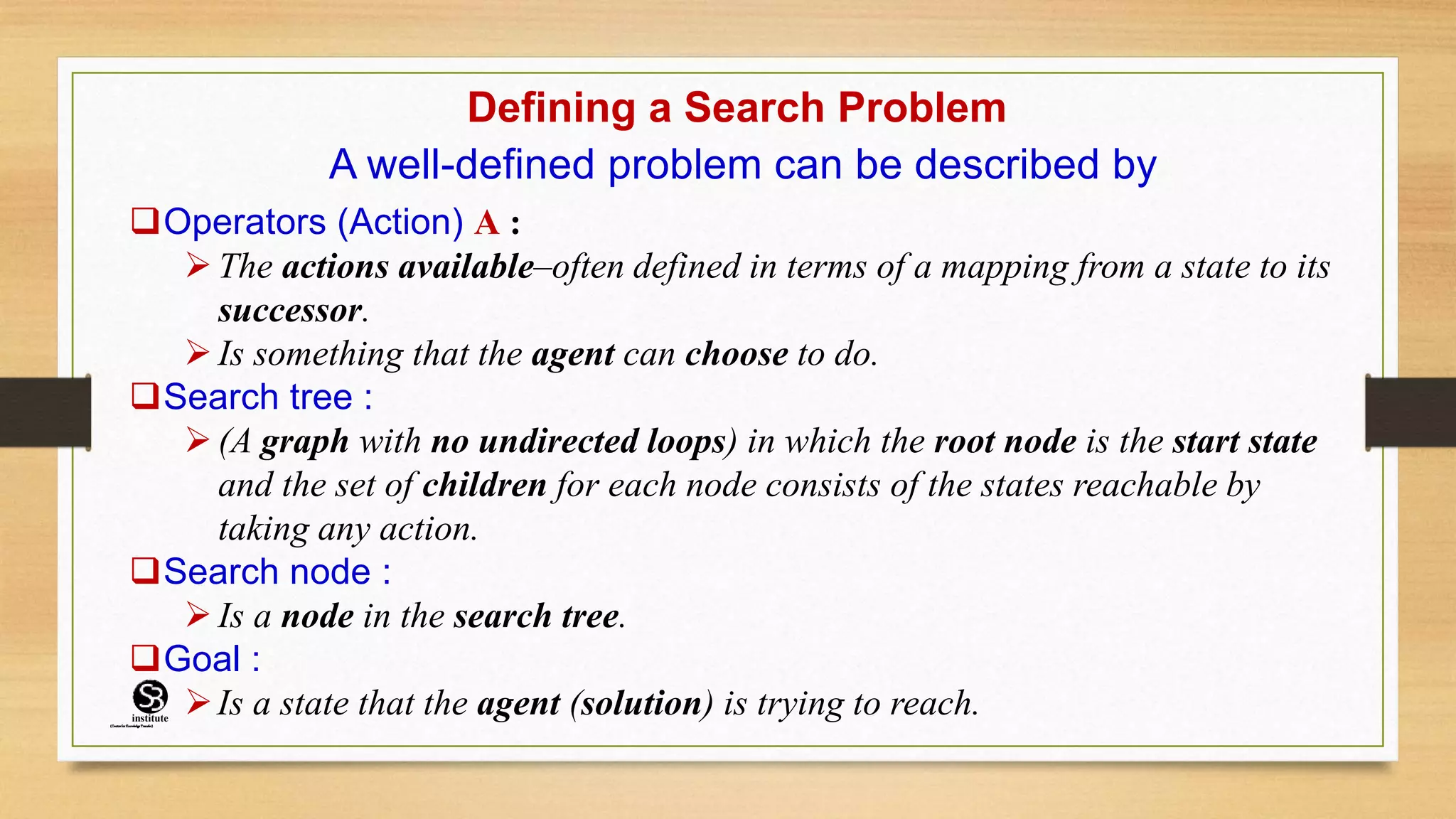
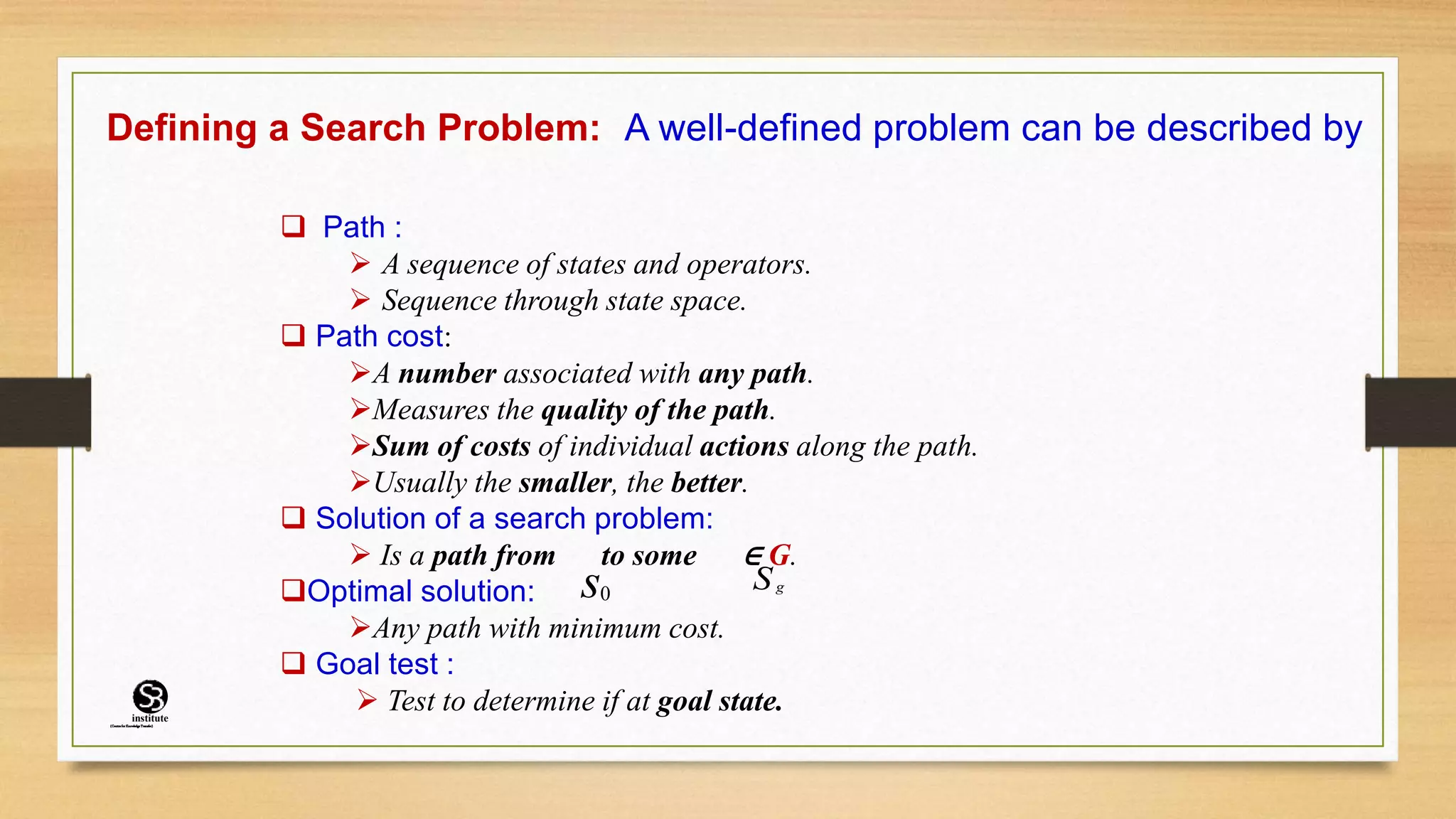
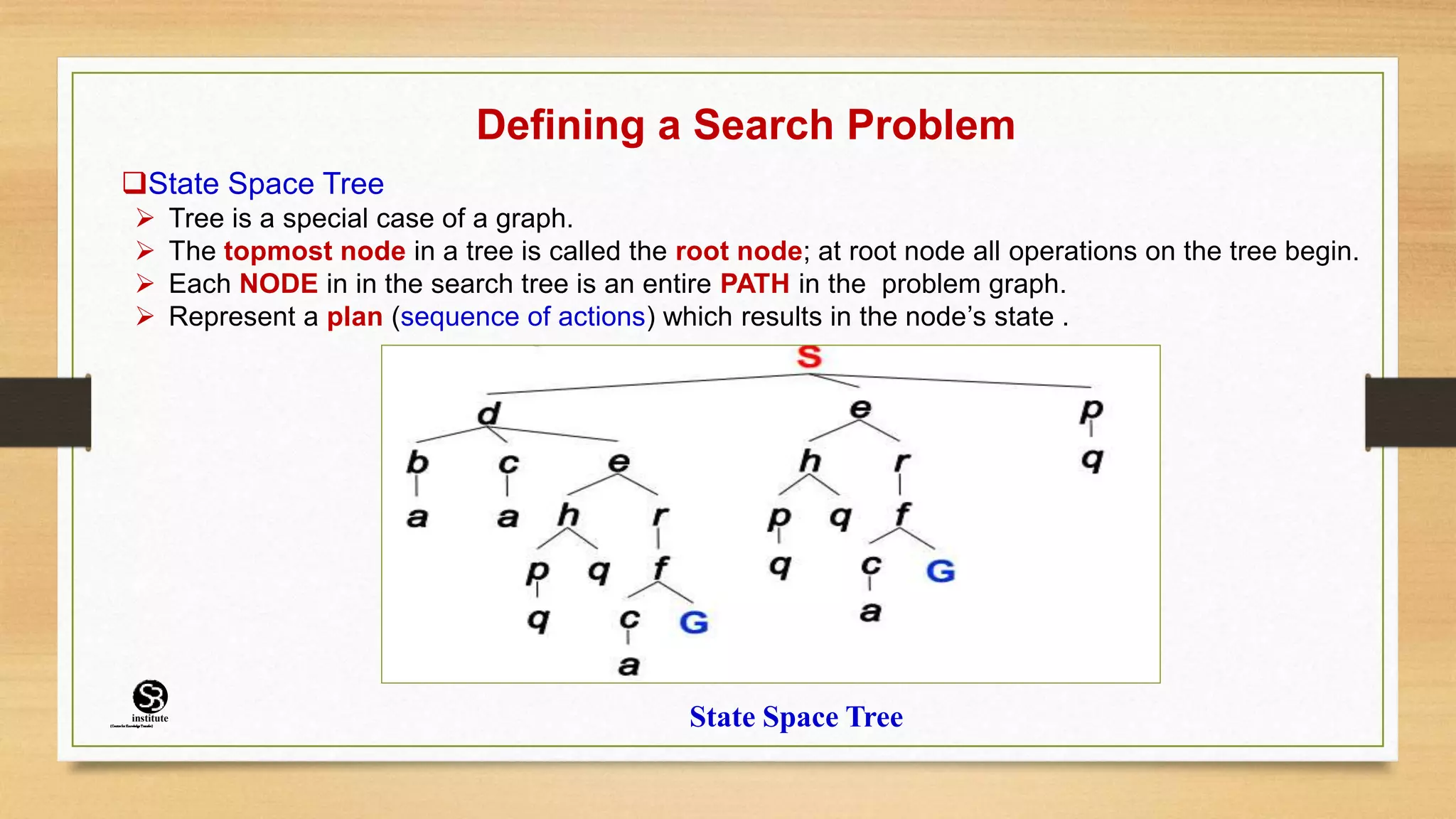
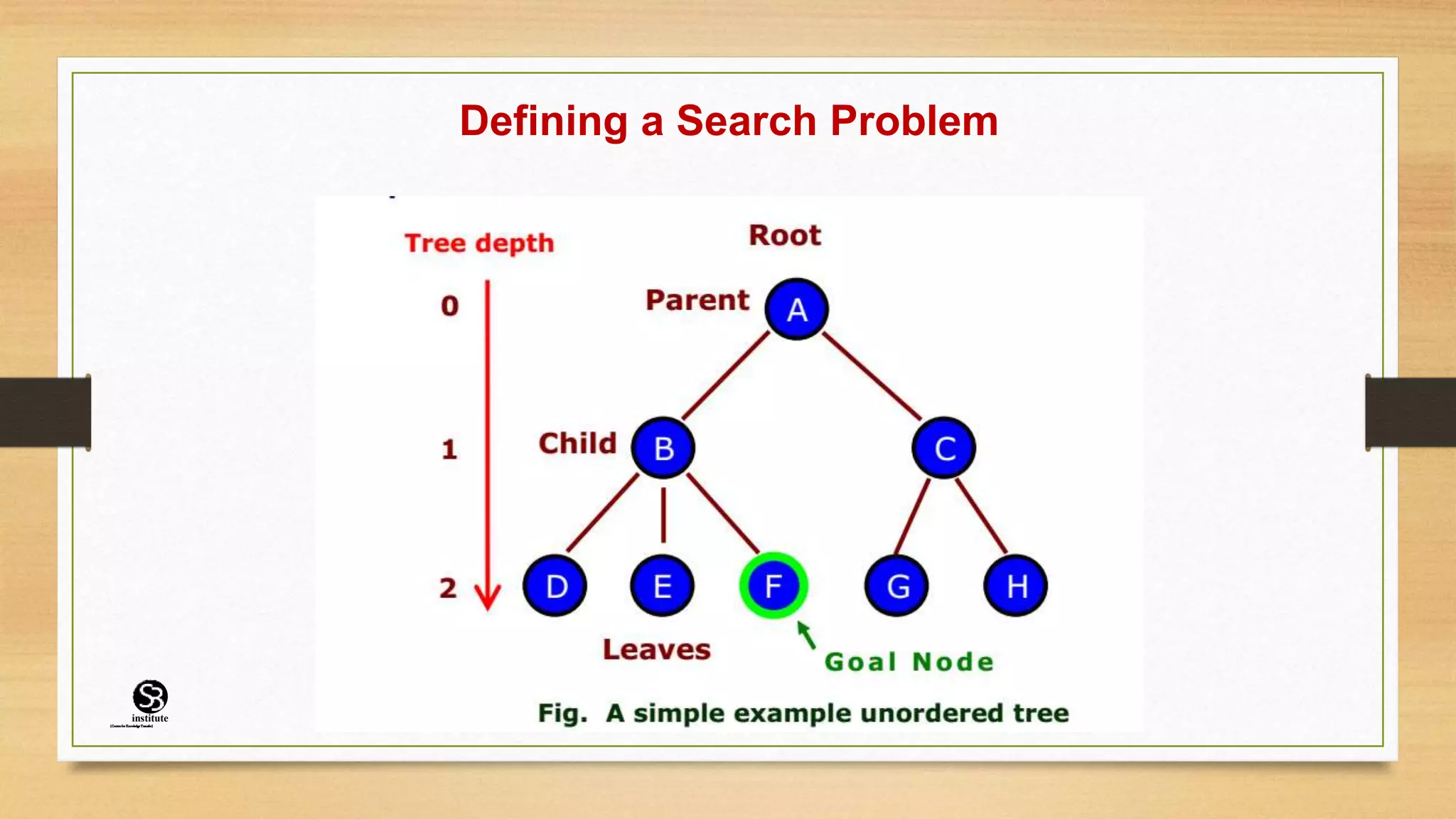
Details on defining search problems including state space, goal states, operators, and paths concerning search.
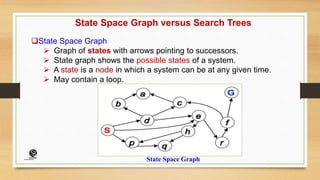
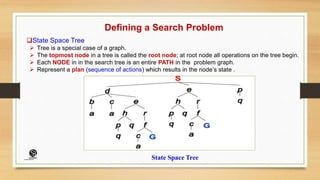
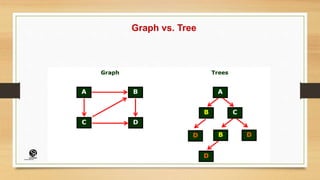
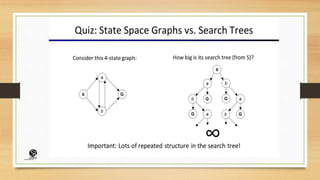
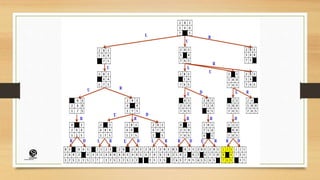
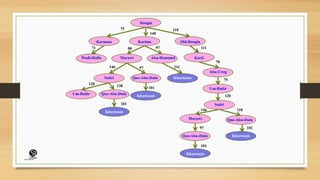
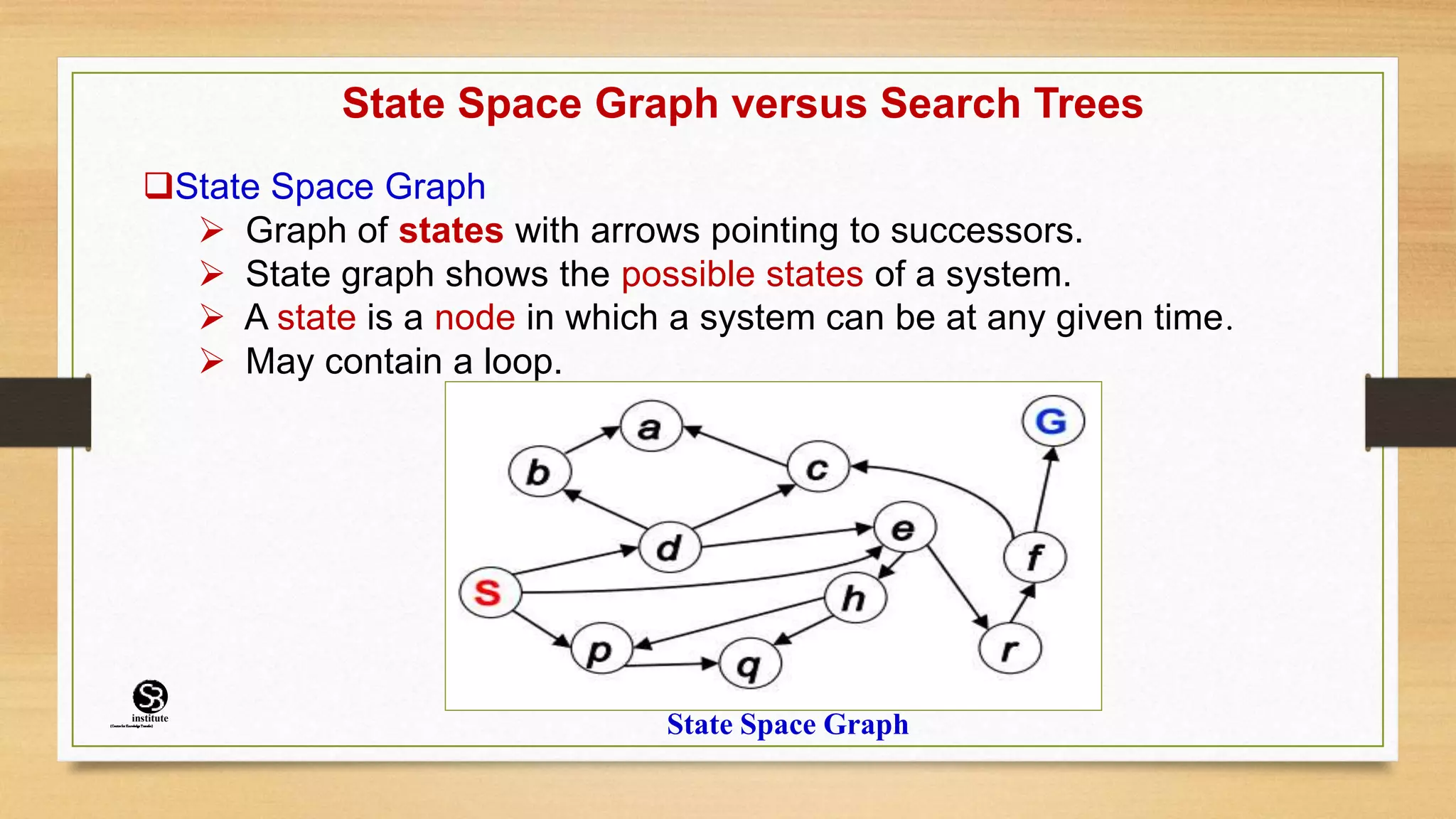
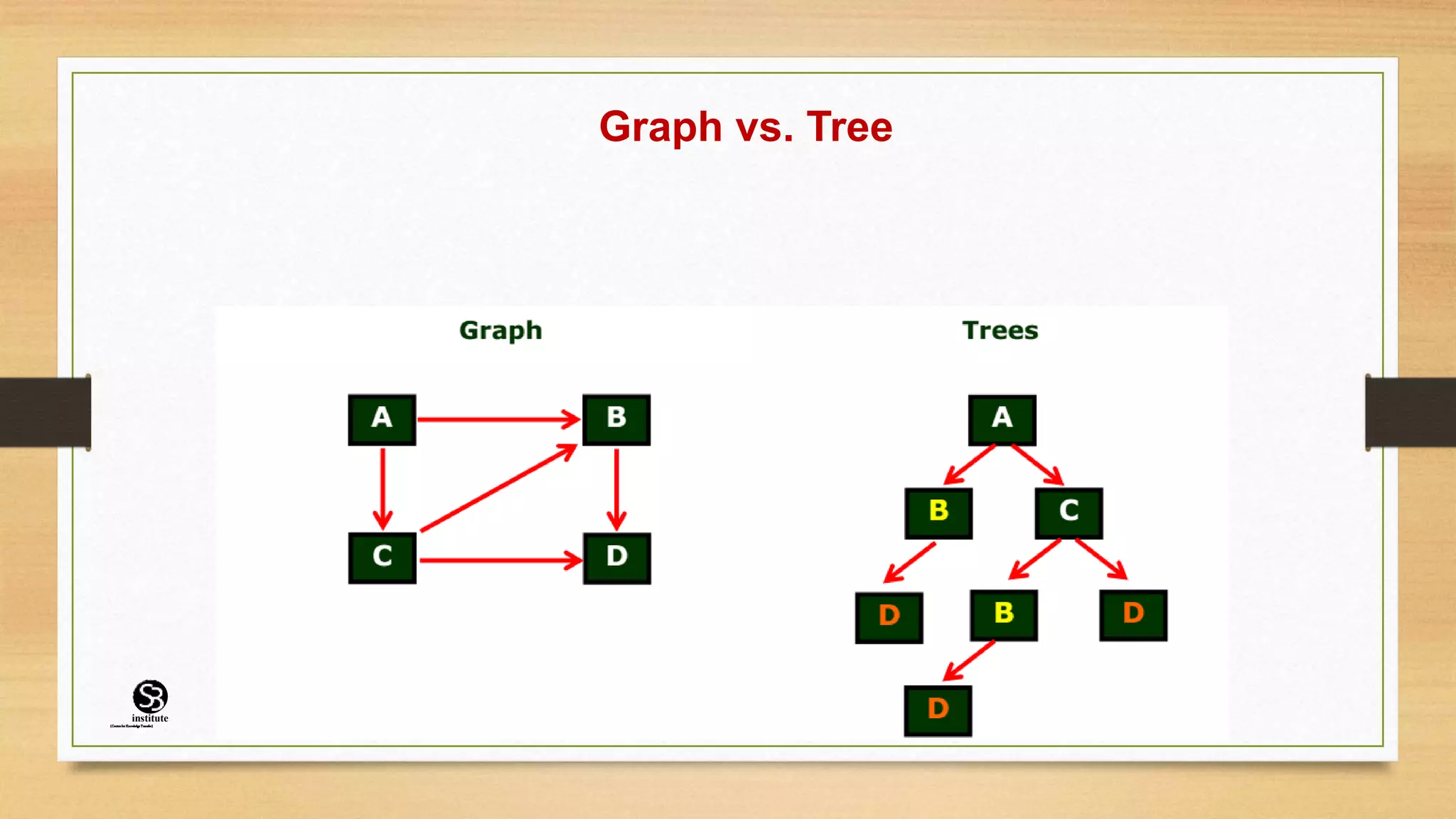
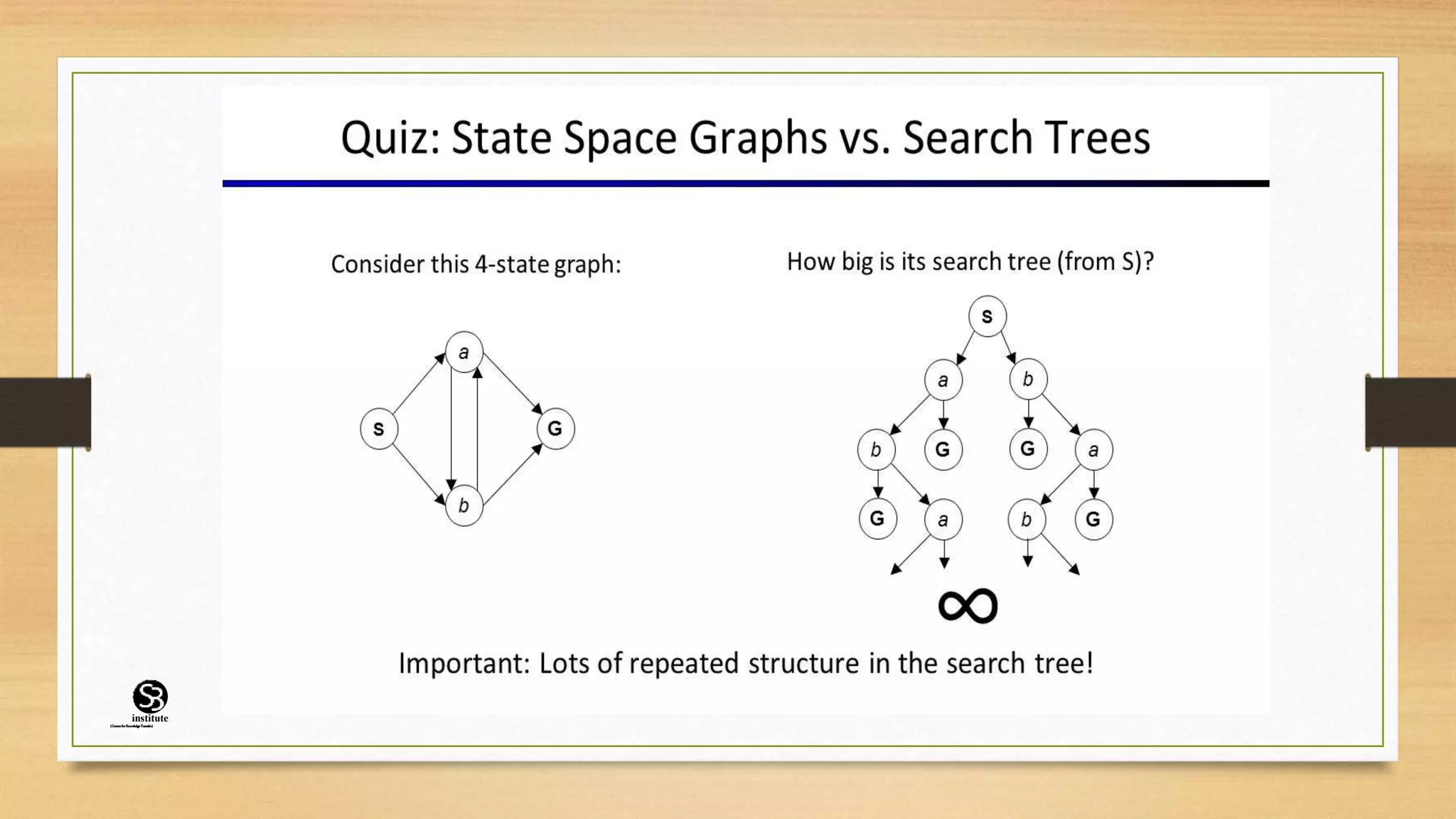
Contrasts between state space graphs and search trees in search problems and the importance of each structure.
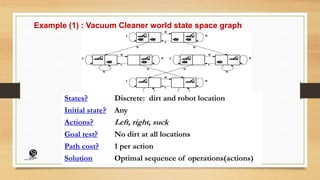
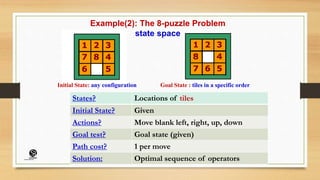
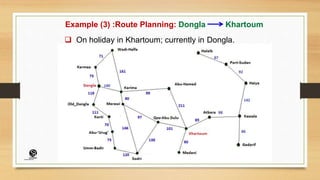
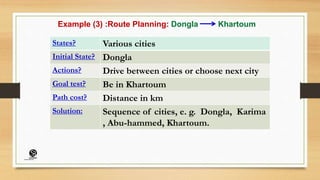
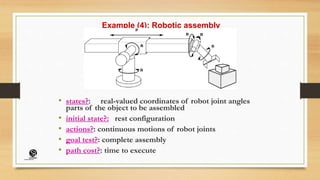
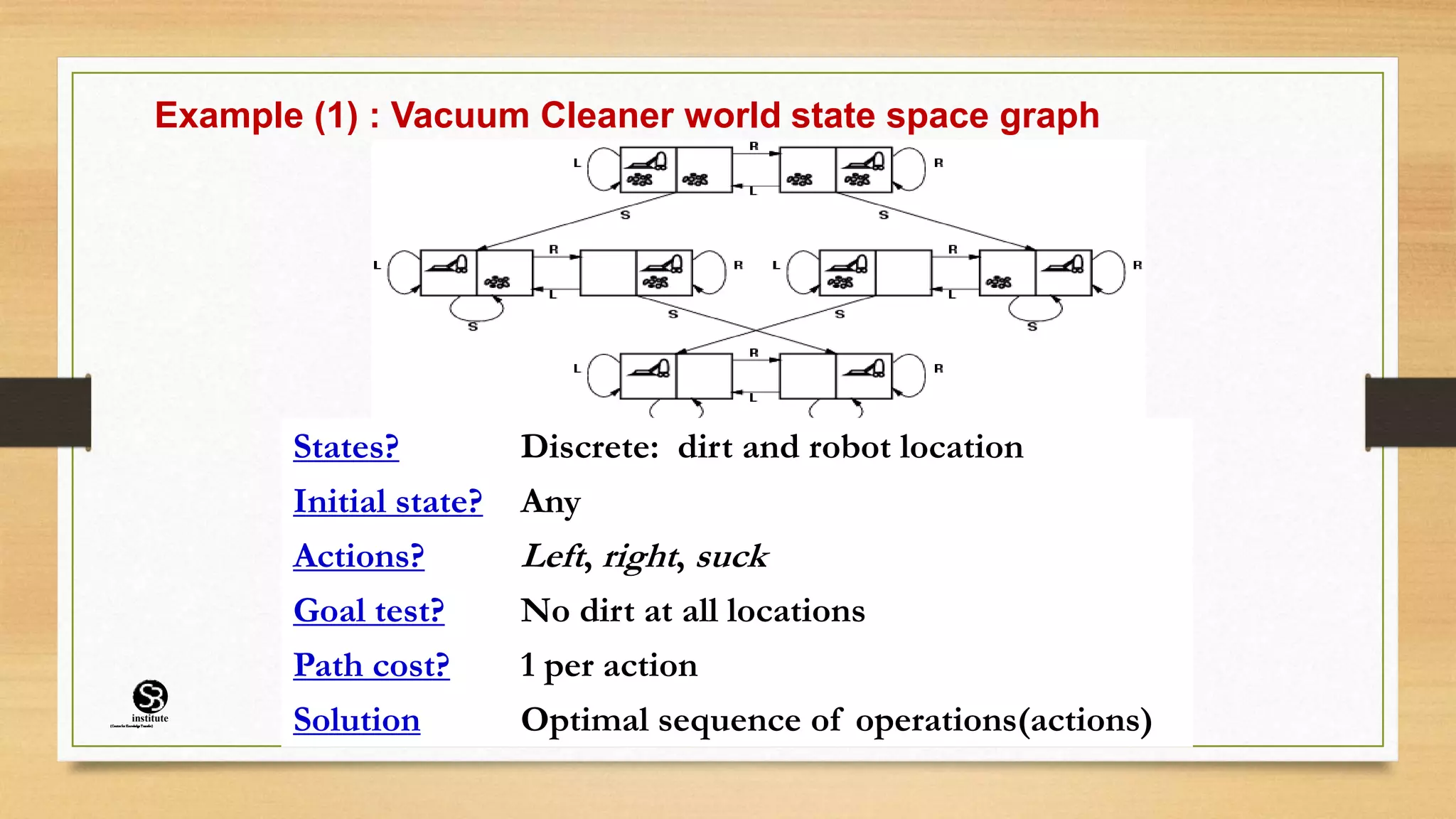
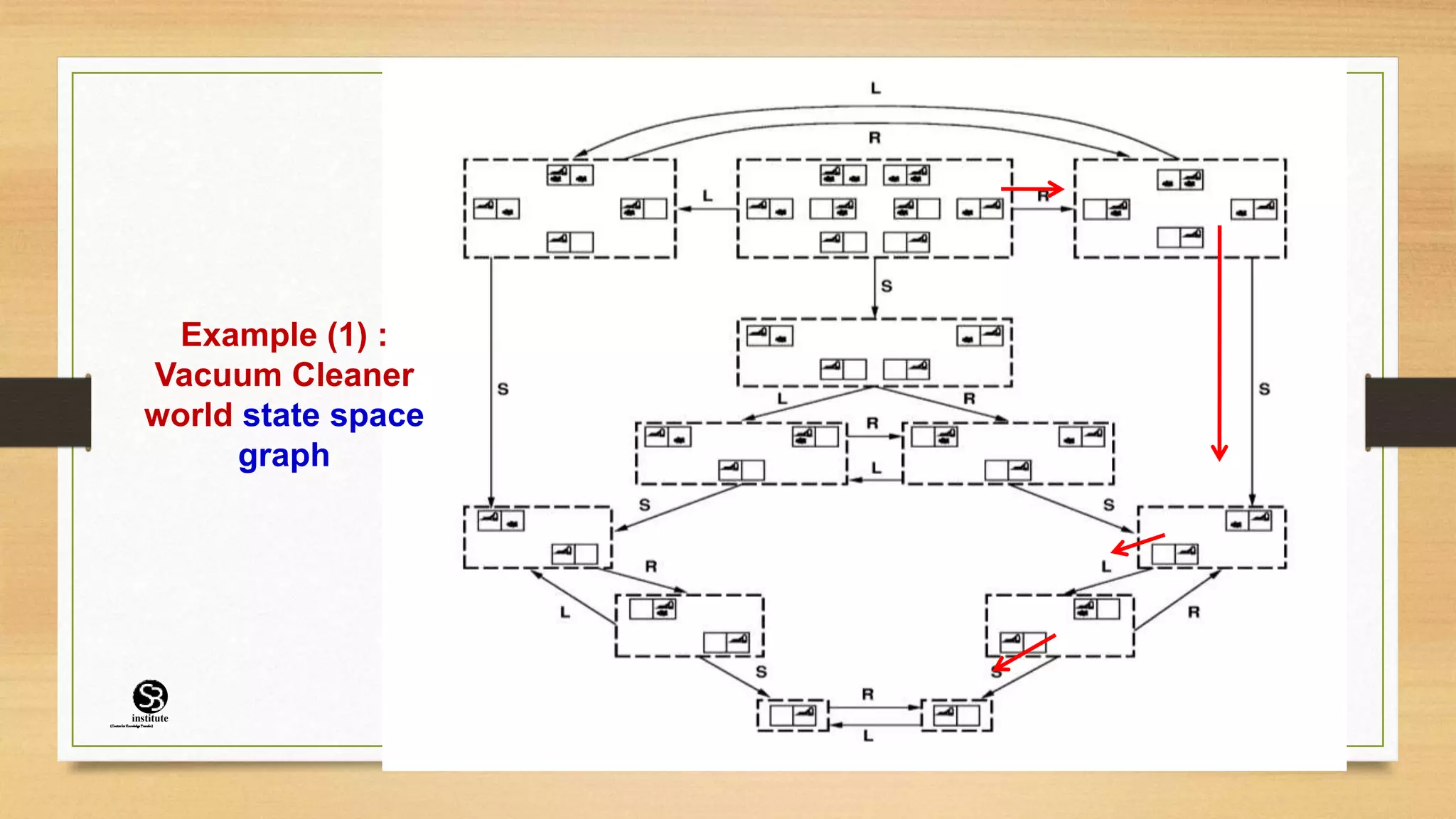
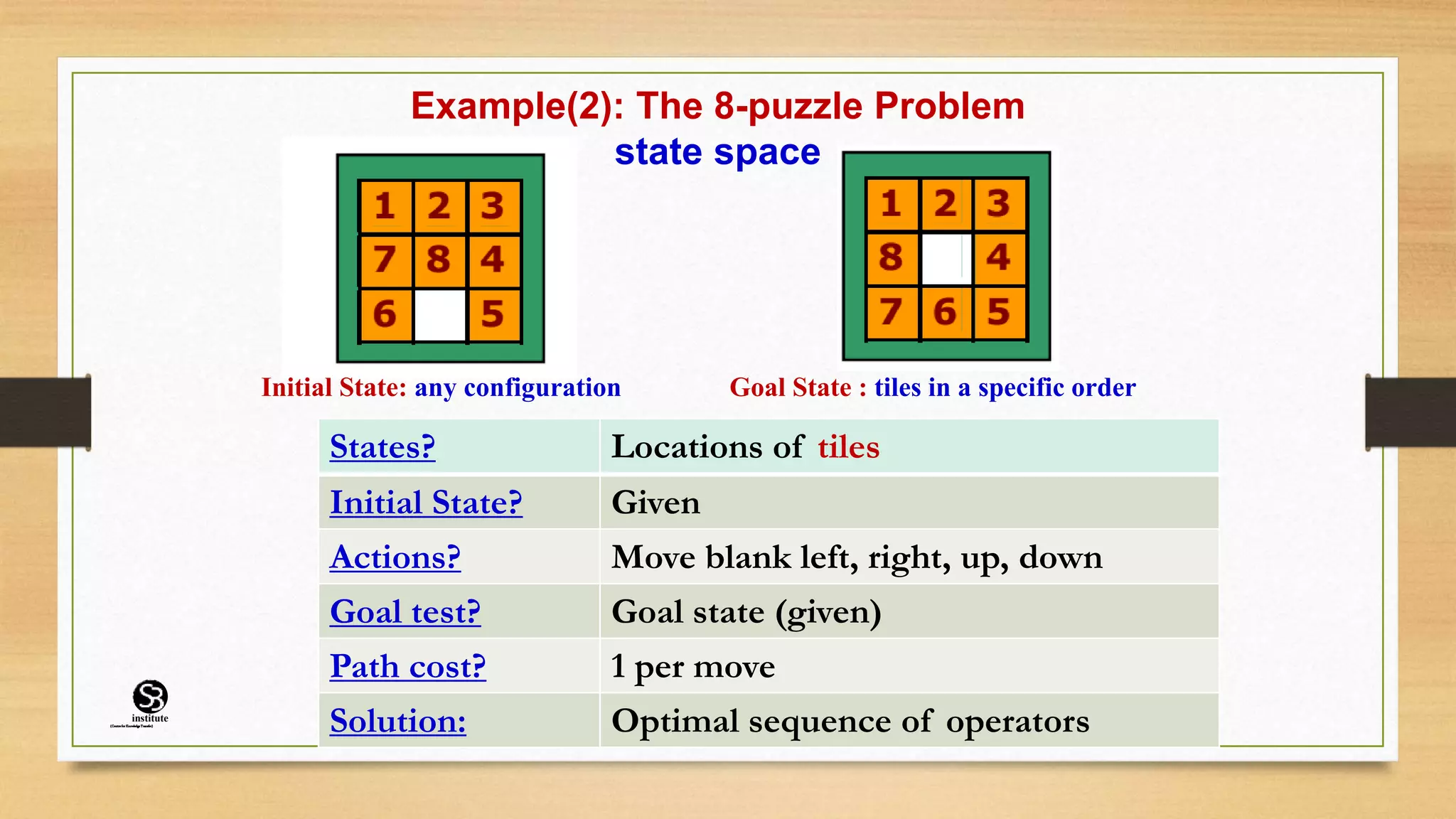
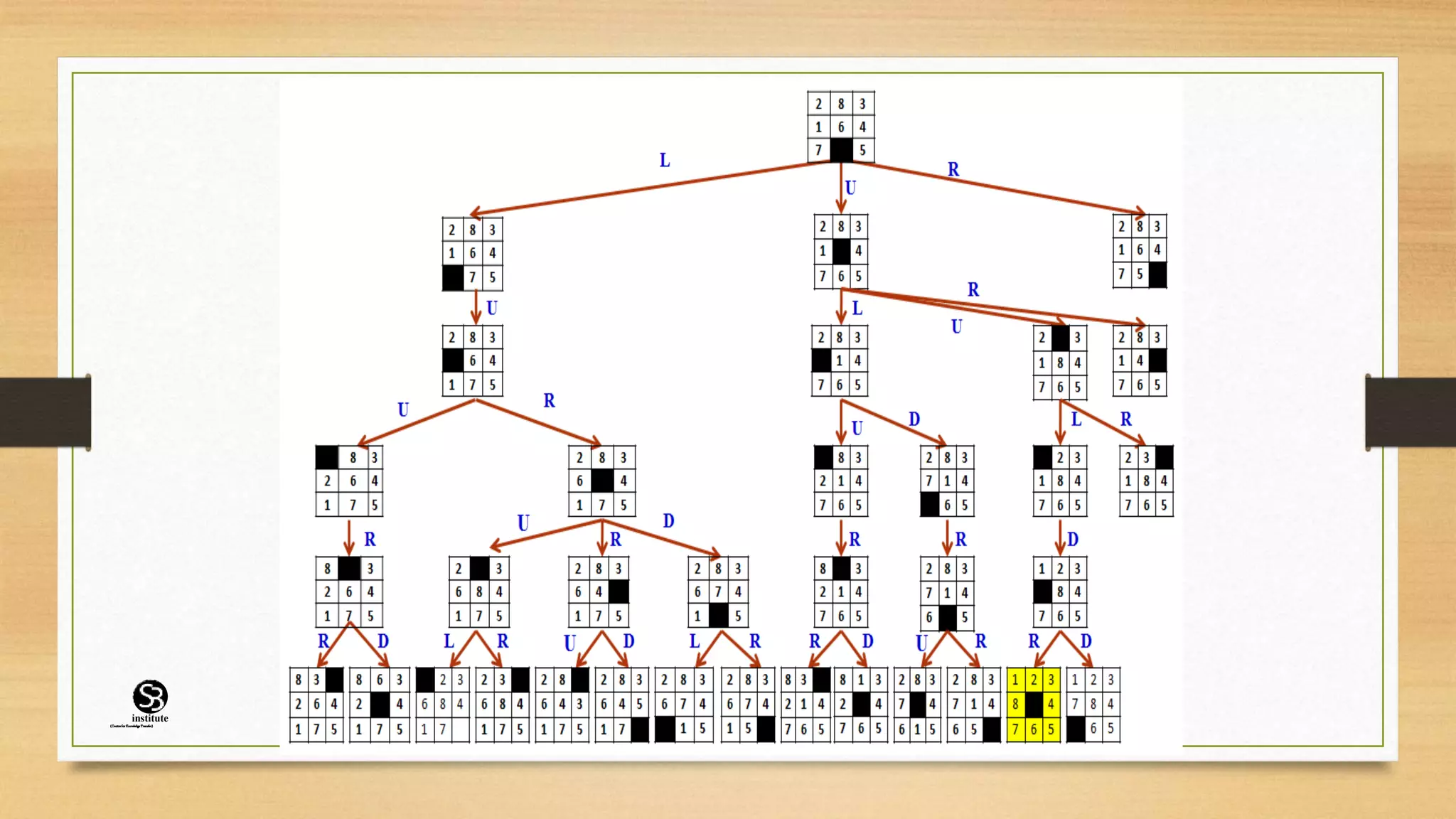
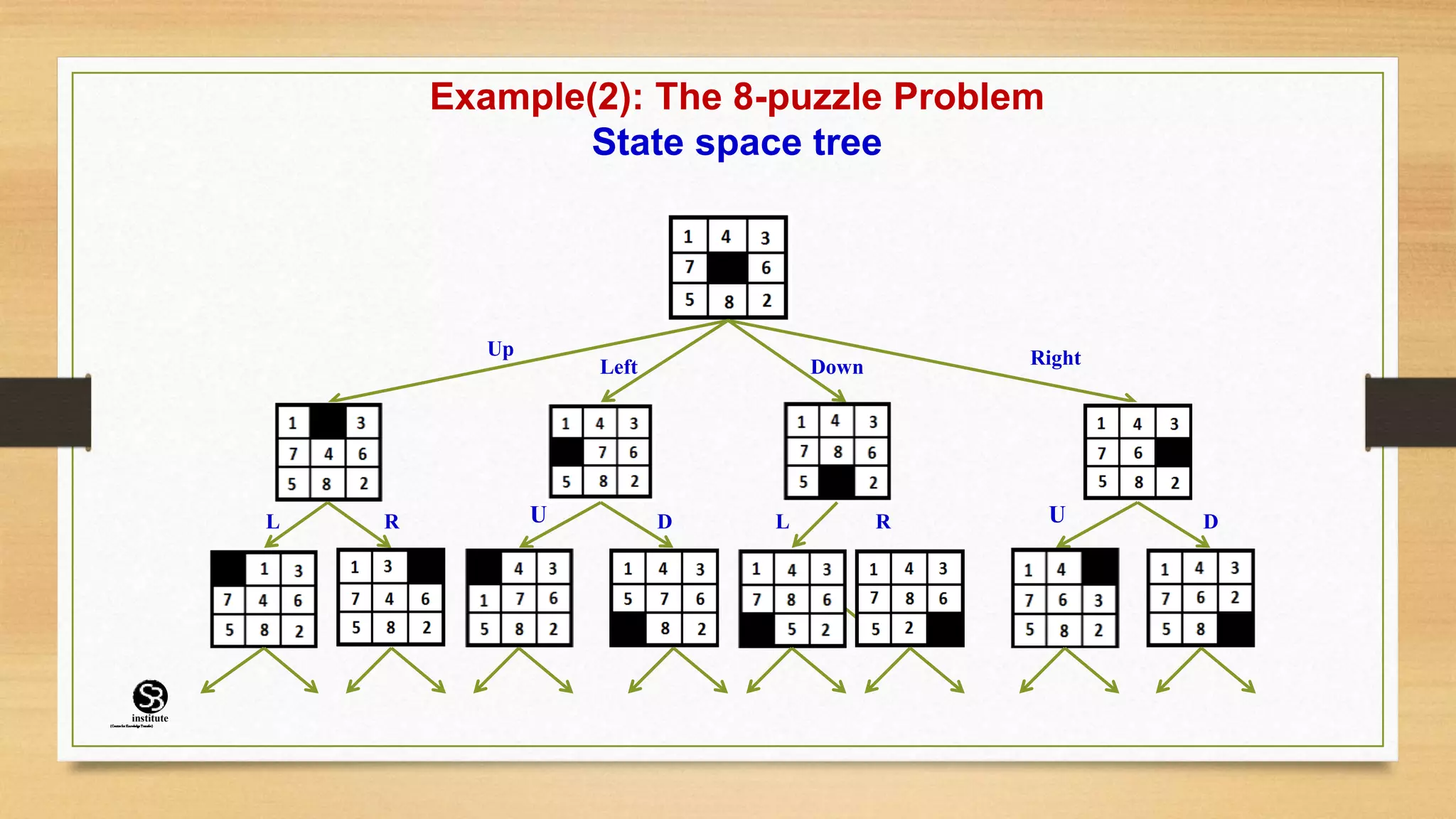
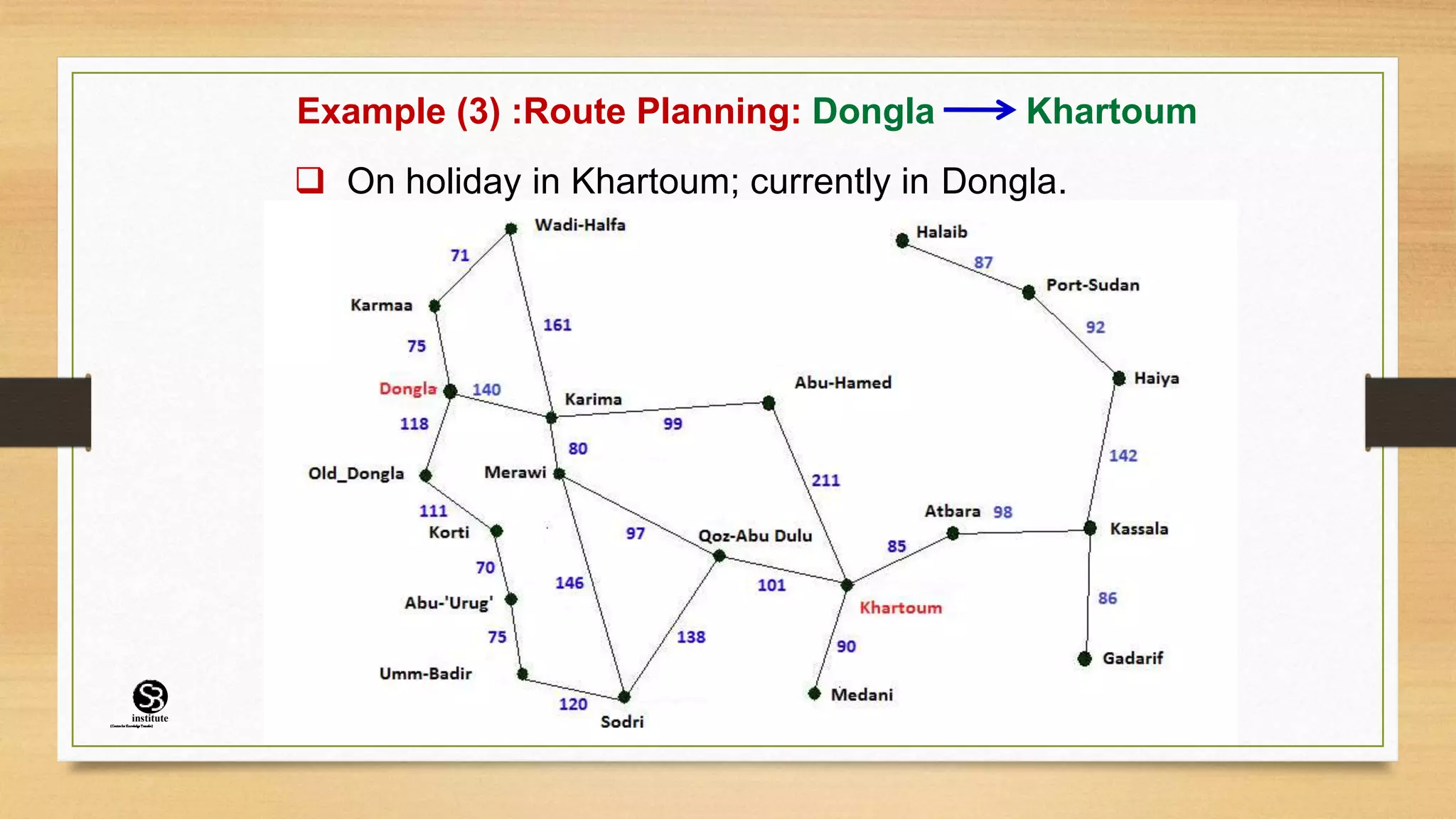
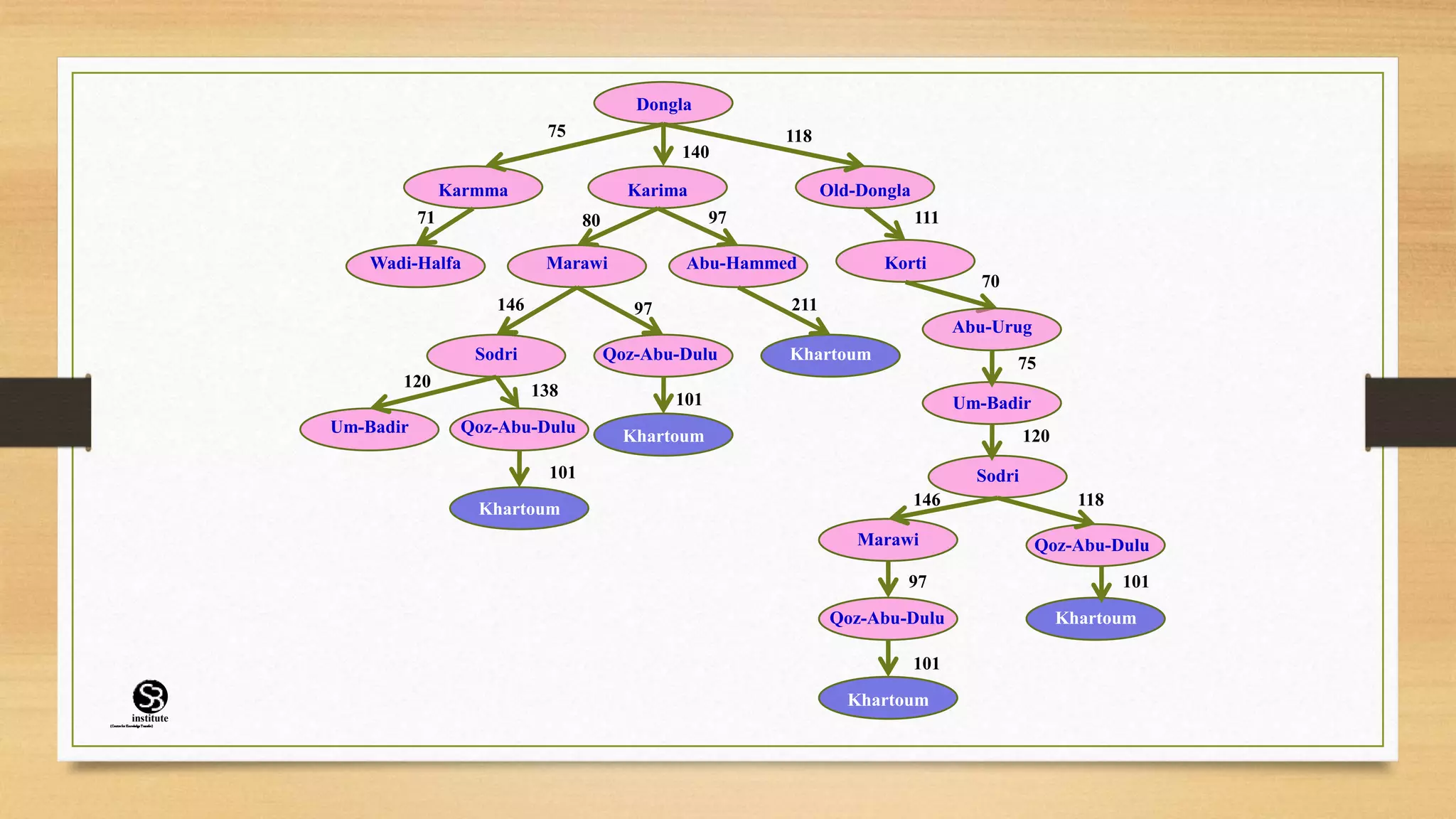
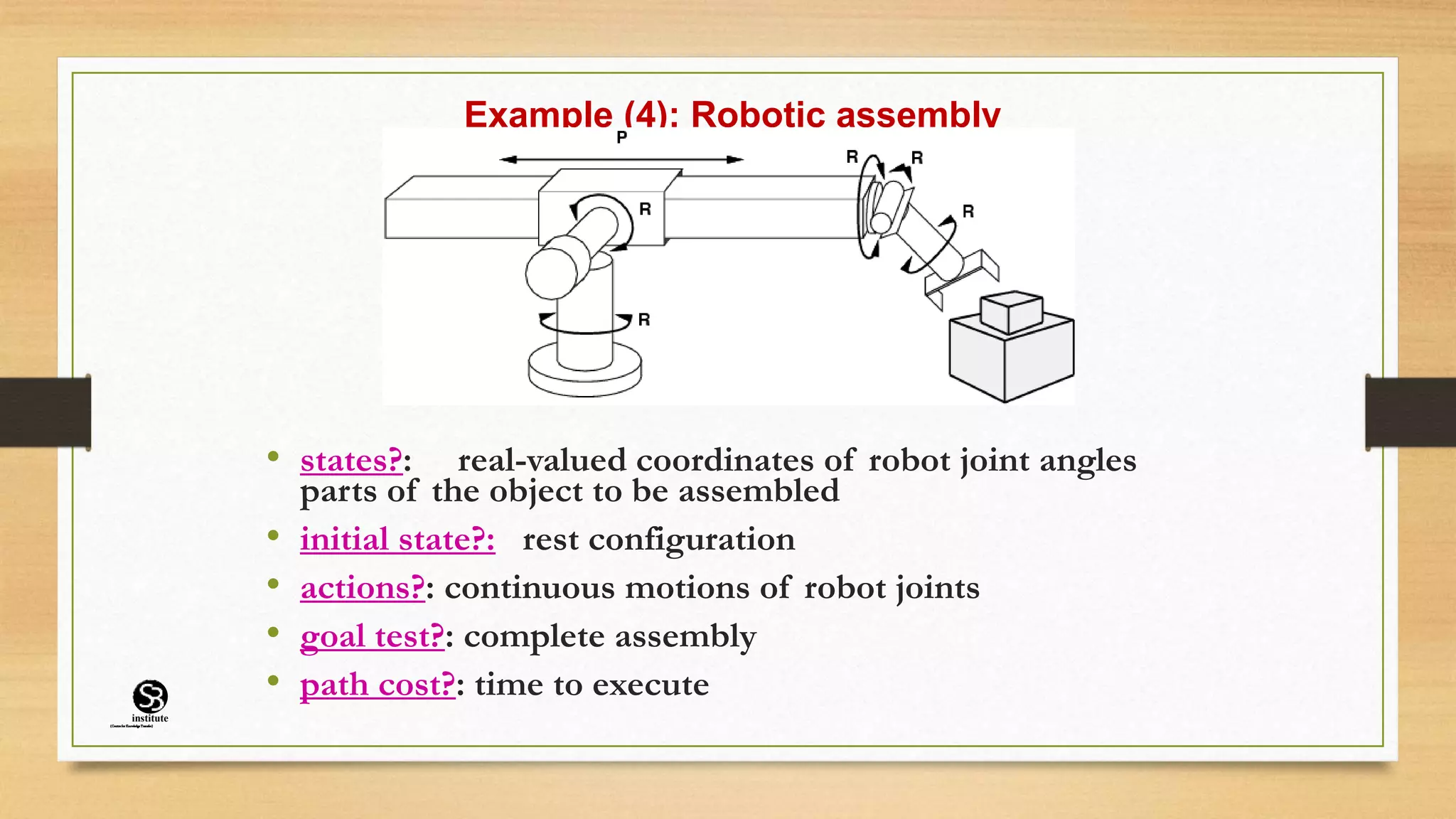
Describes goal-based problem solving, focusing on achieving goals through a sequence of state changes and actions. Multiple examples including vacuum cleaner world, 8-puzzle problem, and route planning, exploring different states and actions.
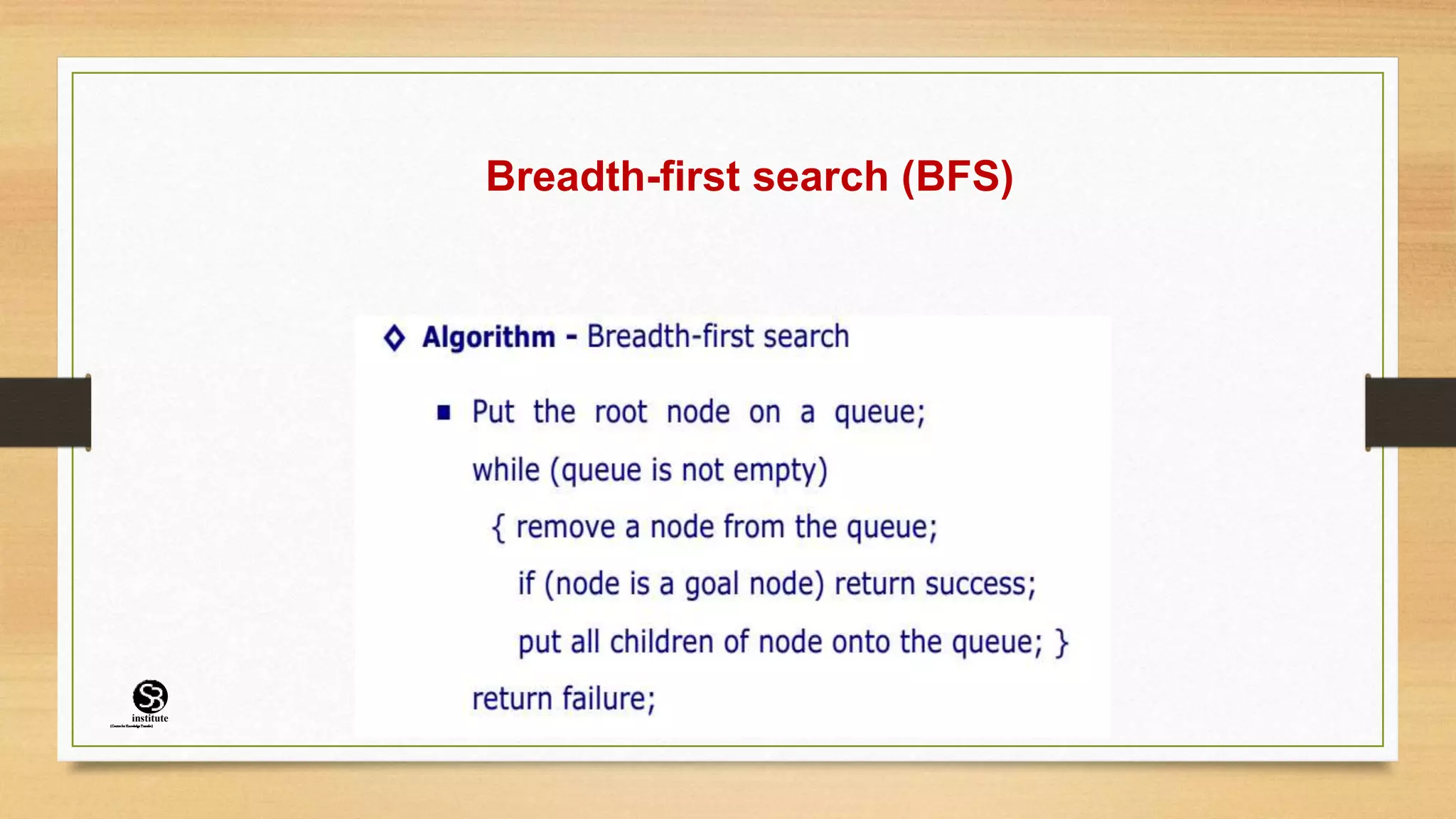
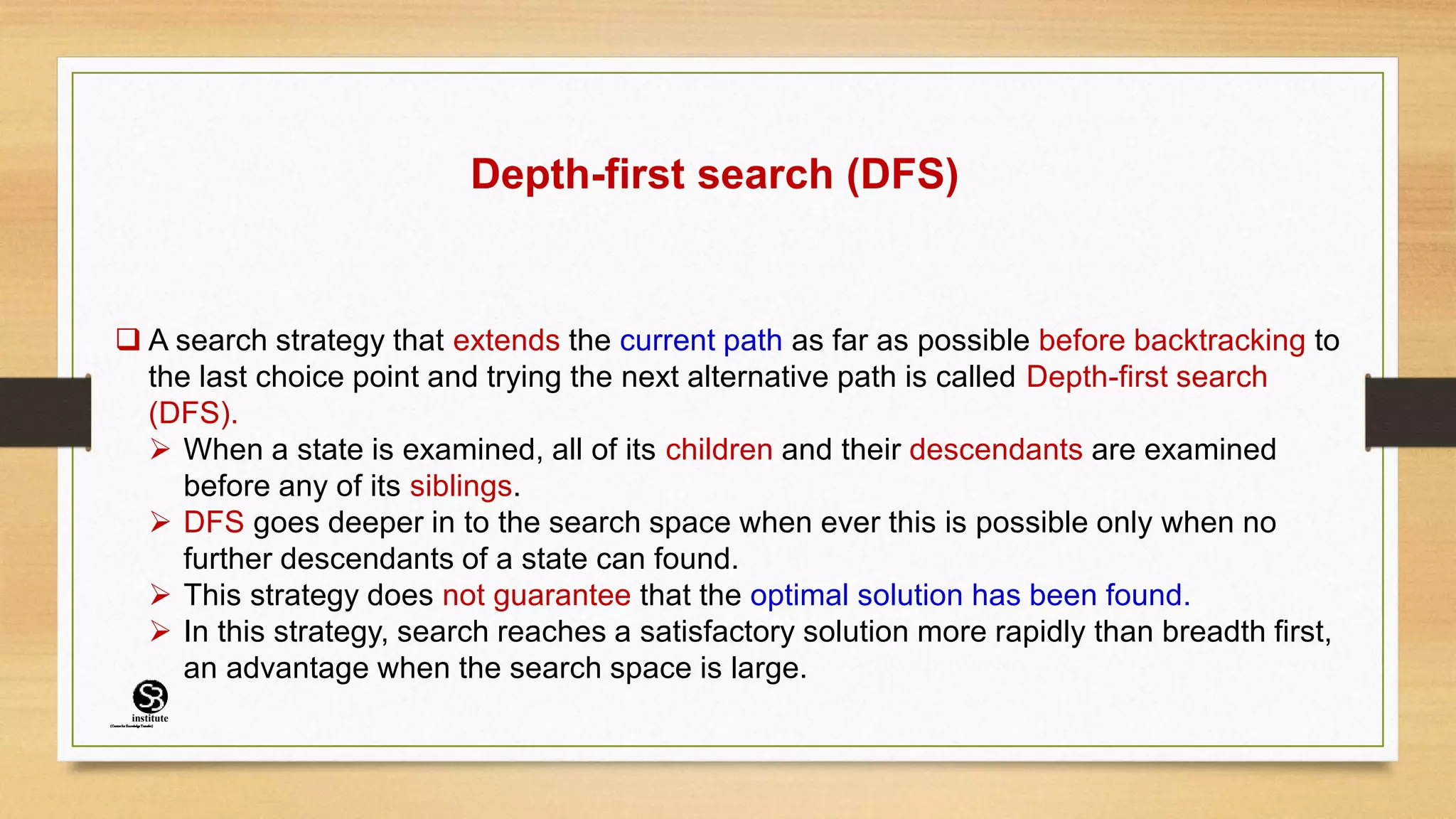
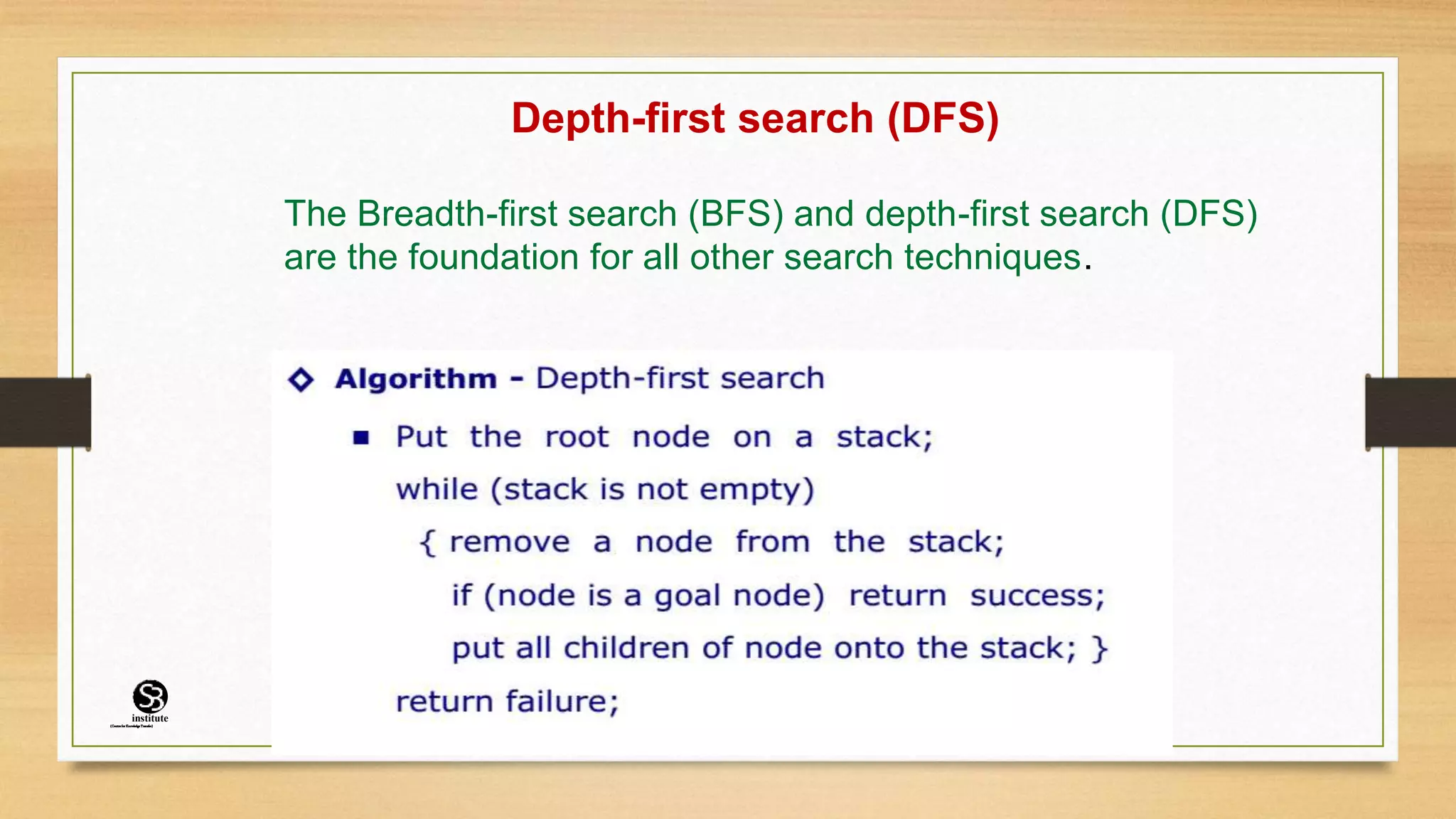
Introduces uninformed search strategies, detailing methods like BFS and DFS, which don’t utilize domain-specific knowledge.
Discusses informed search algorithms utilizing heuristics for efficient search through action-specific guidance.
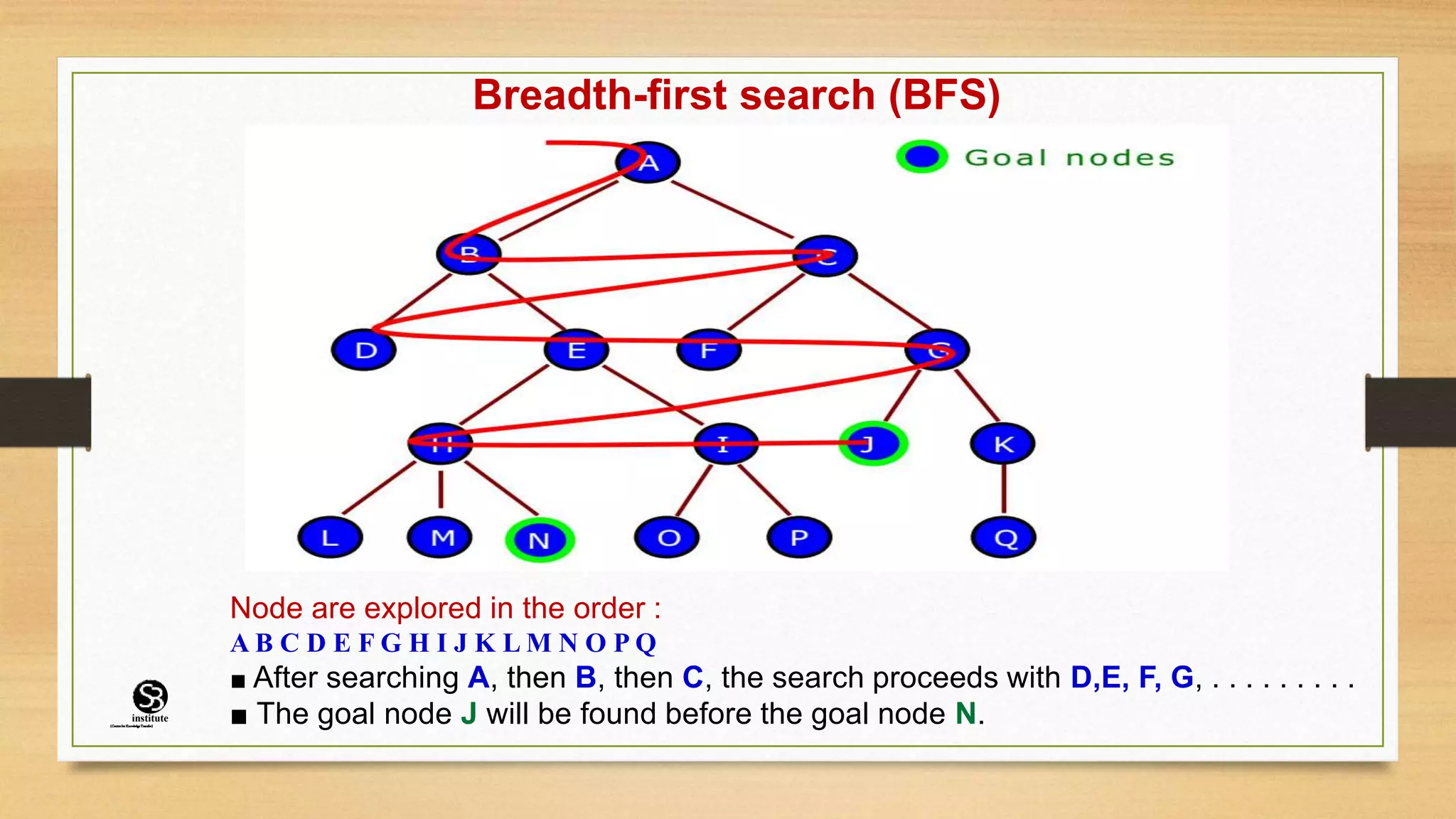
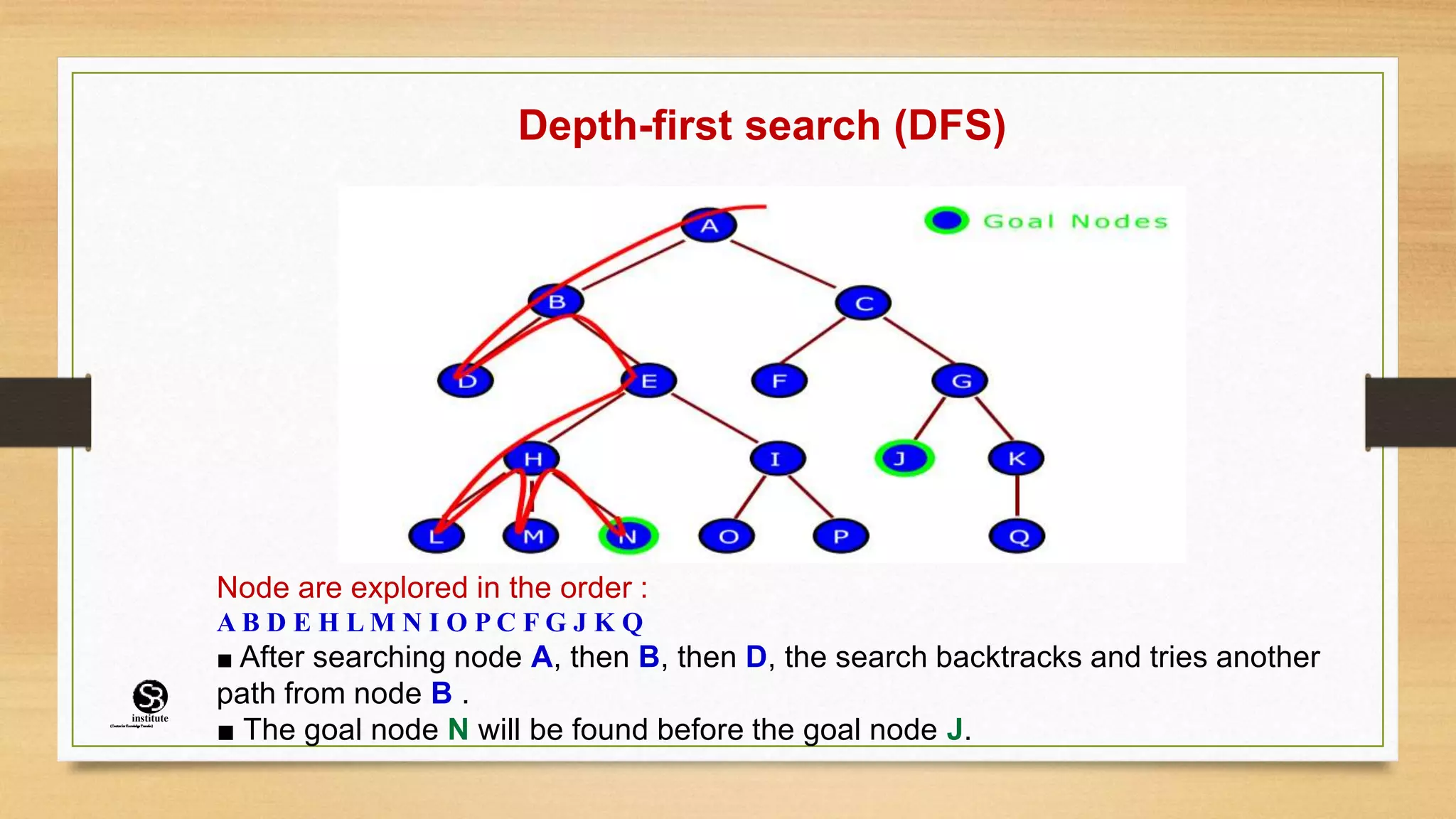
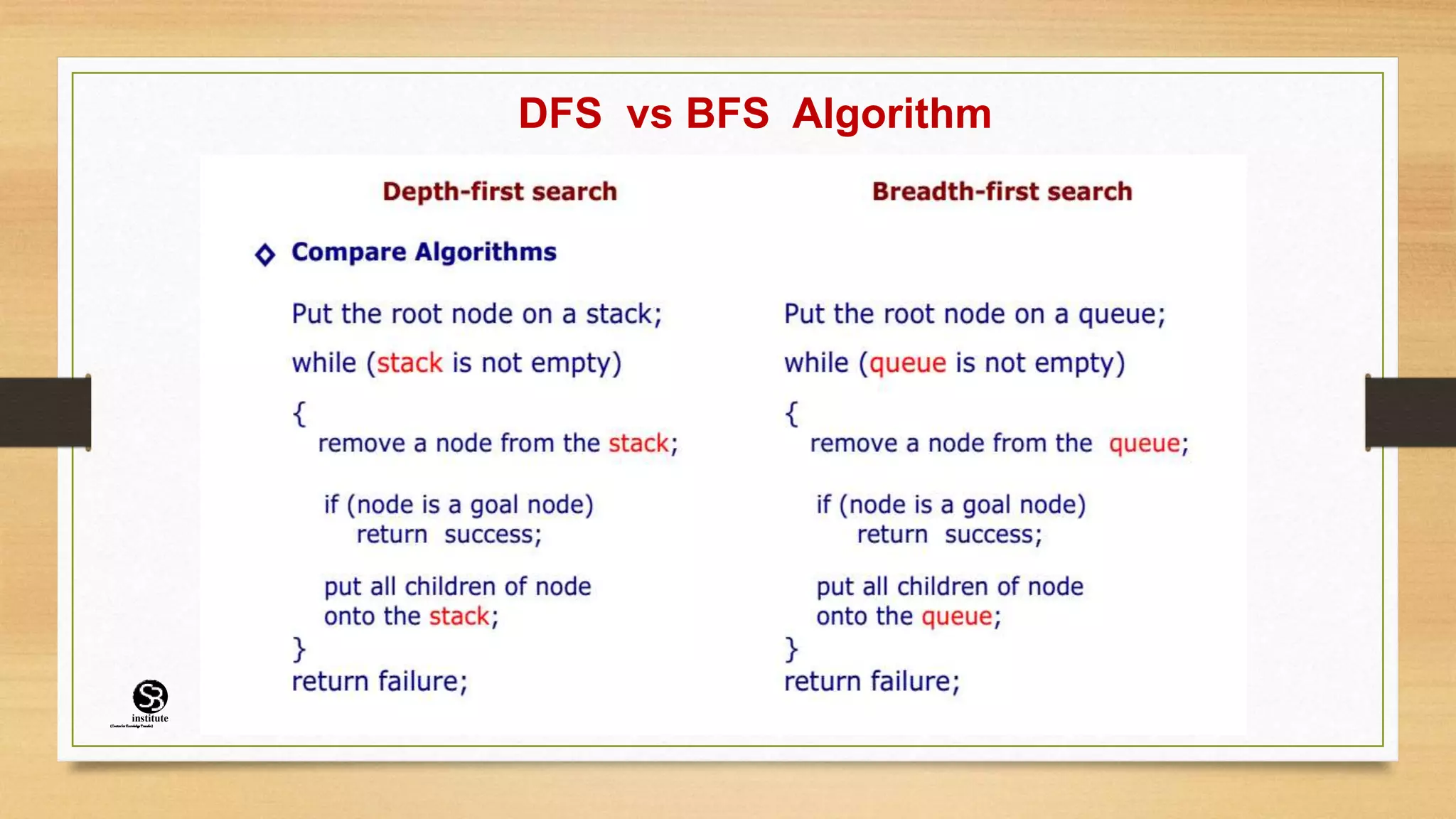
Conclusion covering the comparison between DFS and BFS, including their exploration processes and implications.







































































![UiPath Automation Suite Installation (Hands-On) [2/3]](https://cdn.slidesharecdn.com/ss_thumbnails/automationsuitecommunitysession2-251015095633-a6d862f1-thumbnail.jpg?width=600ounds&width=560&fit=bounds)















