




The document discusses artificial intelligence problem spaces and state space representation, outlining key concepts such as defining the problem, analyzing it, and selecting appropriate problem-solving techniques. It explains uninformed (blind) and informed (heuristic) search techniques, highlighting their differences in complexity, optimality, and methods like breadth-first and A* search. Additionally, it lists various AI problems related to games, routing, layout, assembly sequencing, and task scheduling.
Introduction to Artificial Intelligence and an overview of problem spaces, state spaces, and searching techniques.
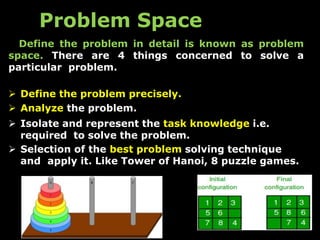
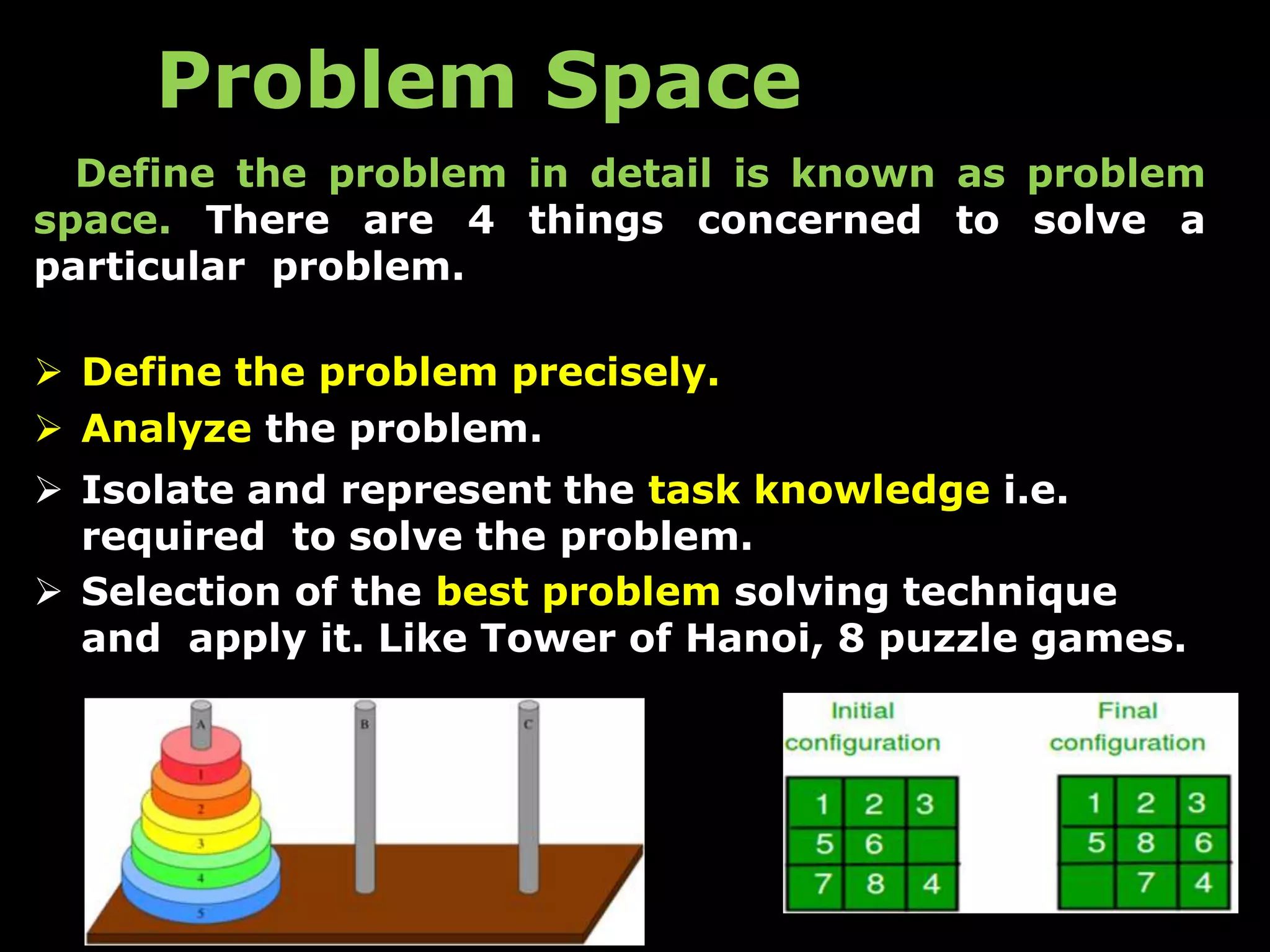
Explains the components of defining a problem space including problem definition, analysis, task knowledge, and solving techniques.
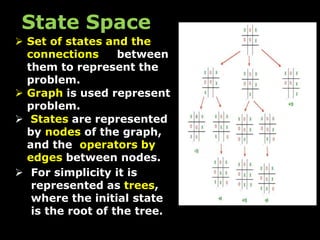
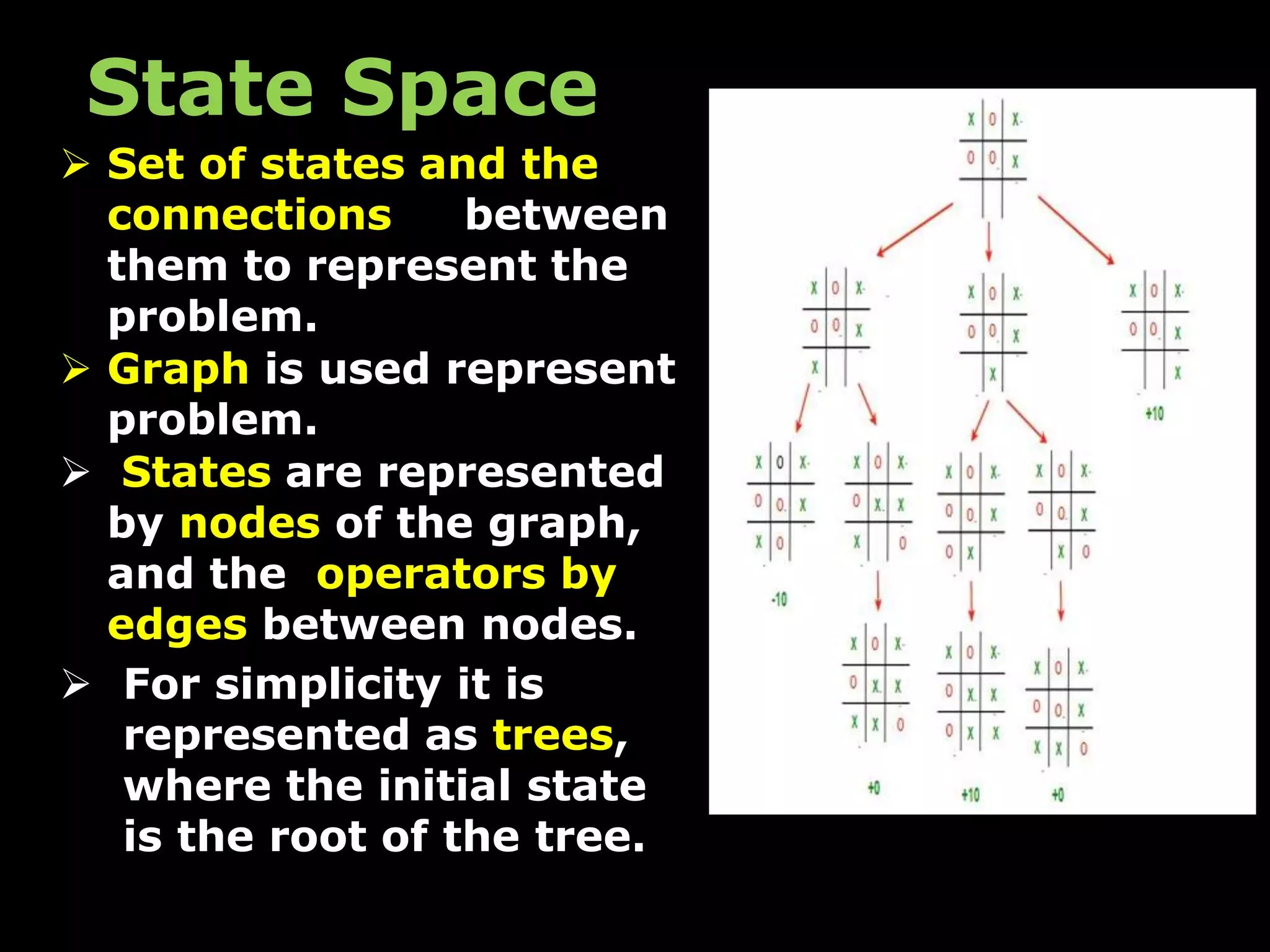
Describes state space as a representation of problems using graph models with states as nodes and operators as edges.
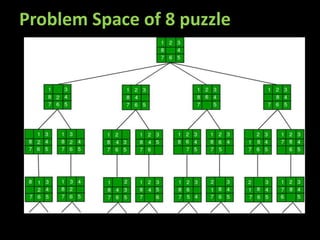
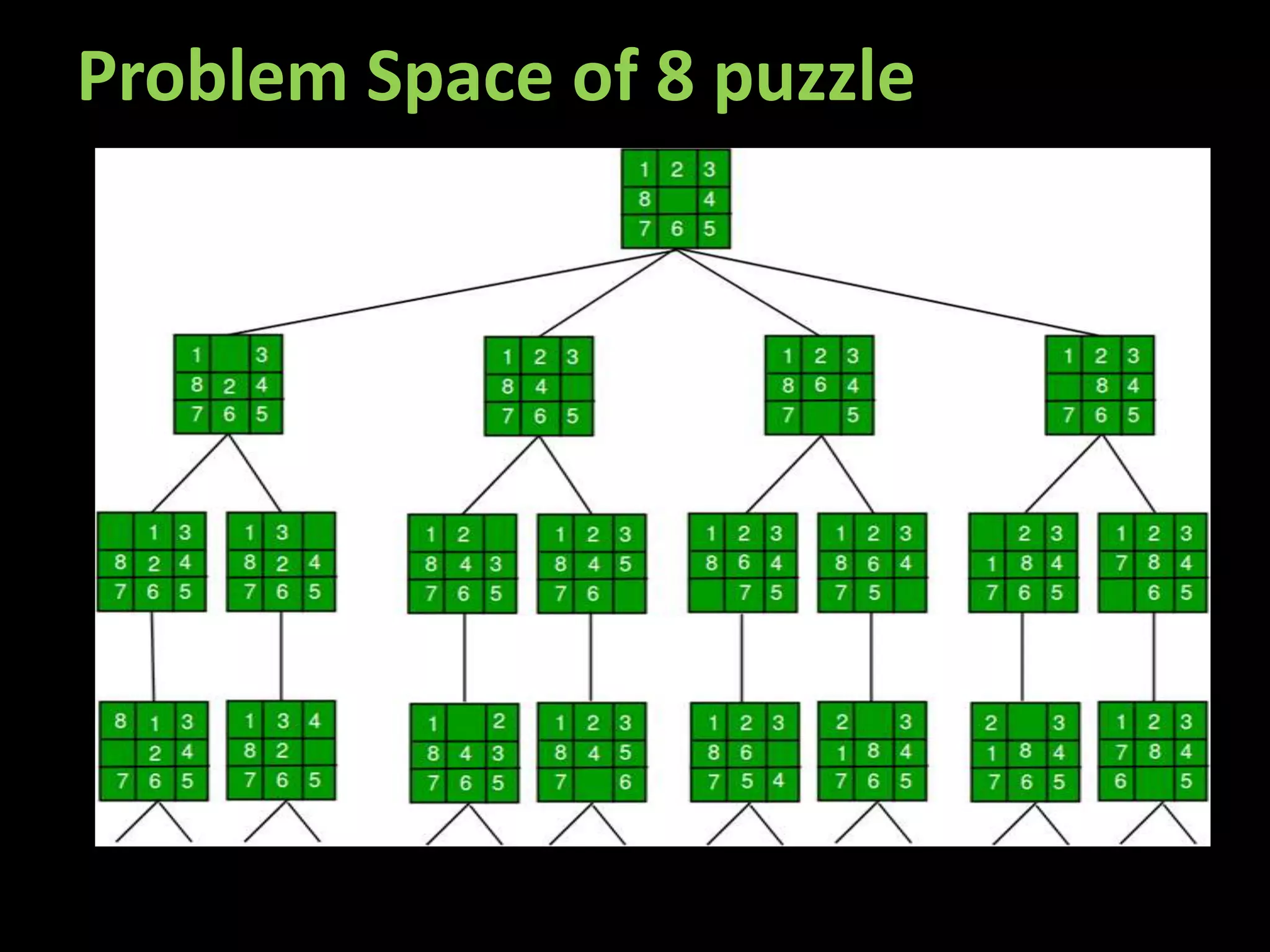
Illustrates the problem space specifically for the 8 puzzle example.
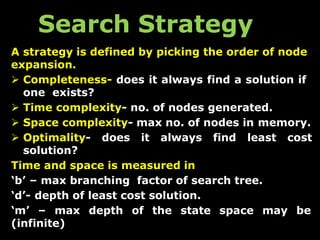
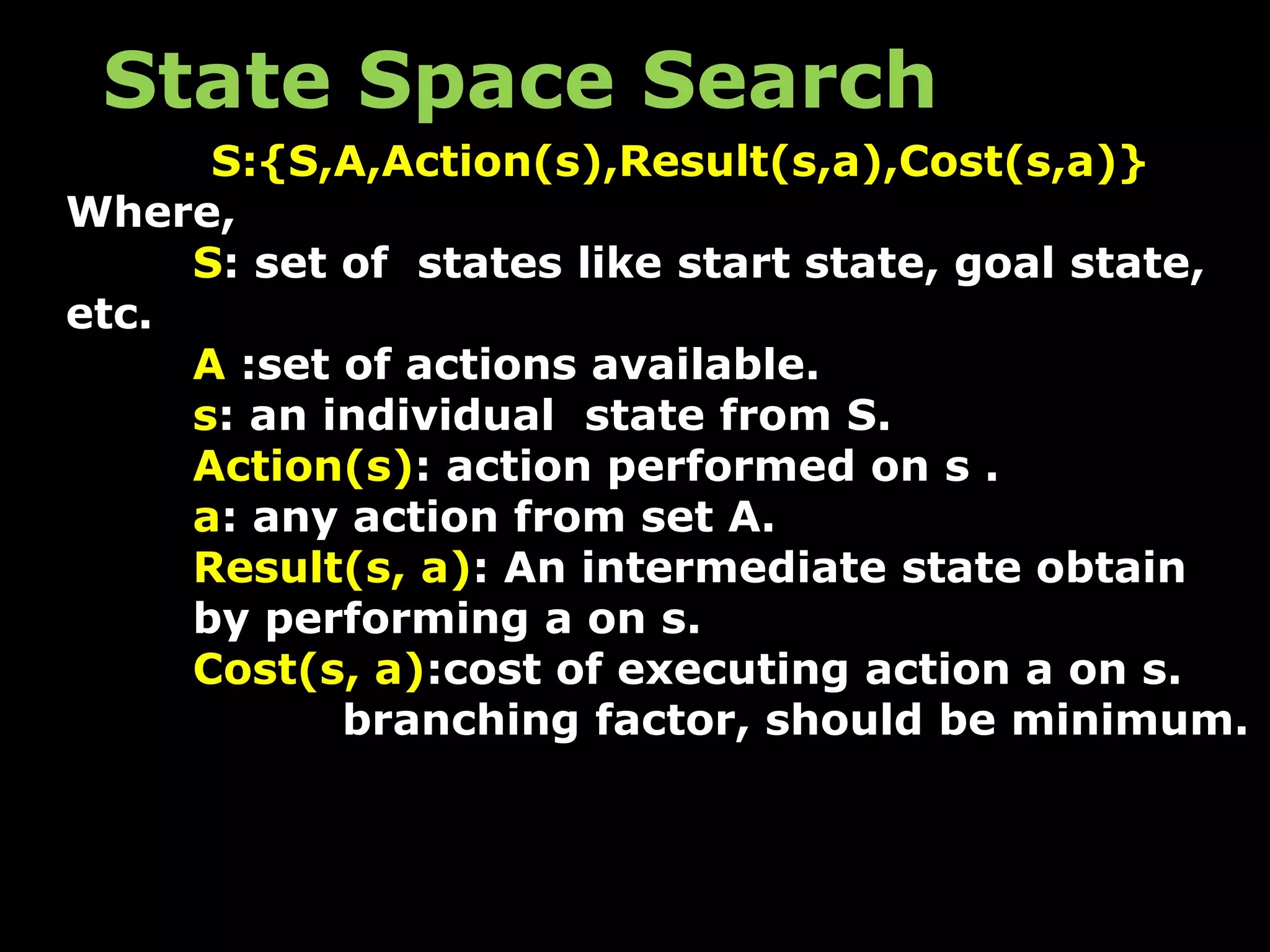
Outlines search strategy metrics: completeness, time complexity, space complexity, and optimality in the context of state space.
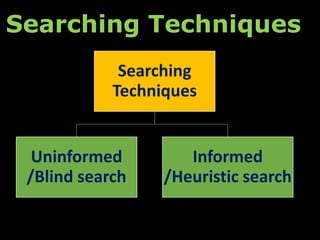
Introduces two primary searching techniques: Uninformed/Blind search and Informed/Heuristic search.
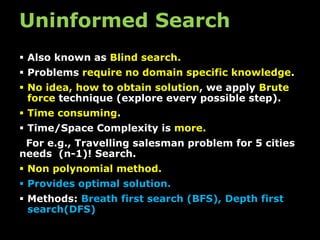
Details uninformed search techniques like BFS and DFS, their characteristics, complexities, and examples.
Describes informed search techniques using heuristics, their advantages, speed of finding solutions, and complexity.
Lists various AI problems, including games, route finding, and scheduling, highlighting areas where AI is applied.






















































































