Download to read offline










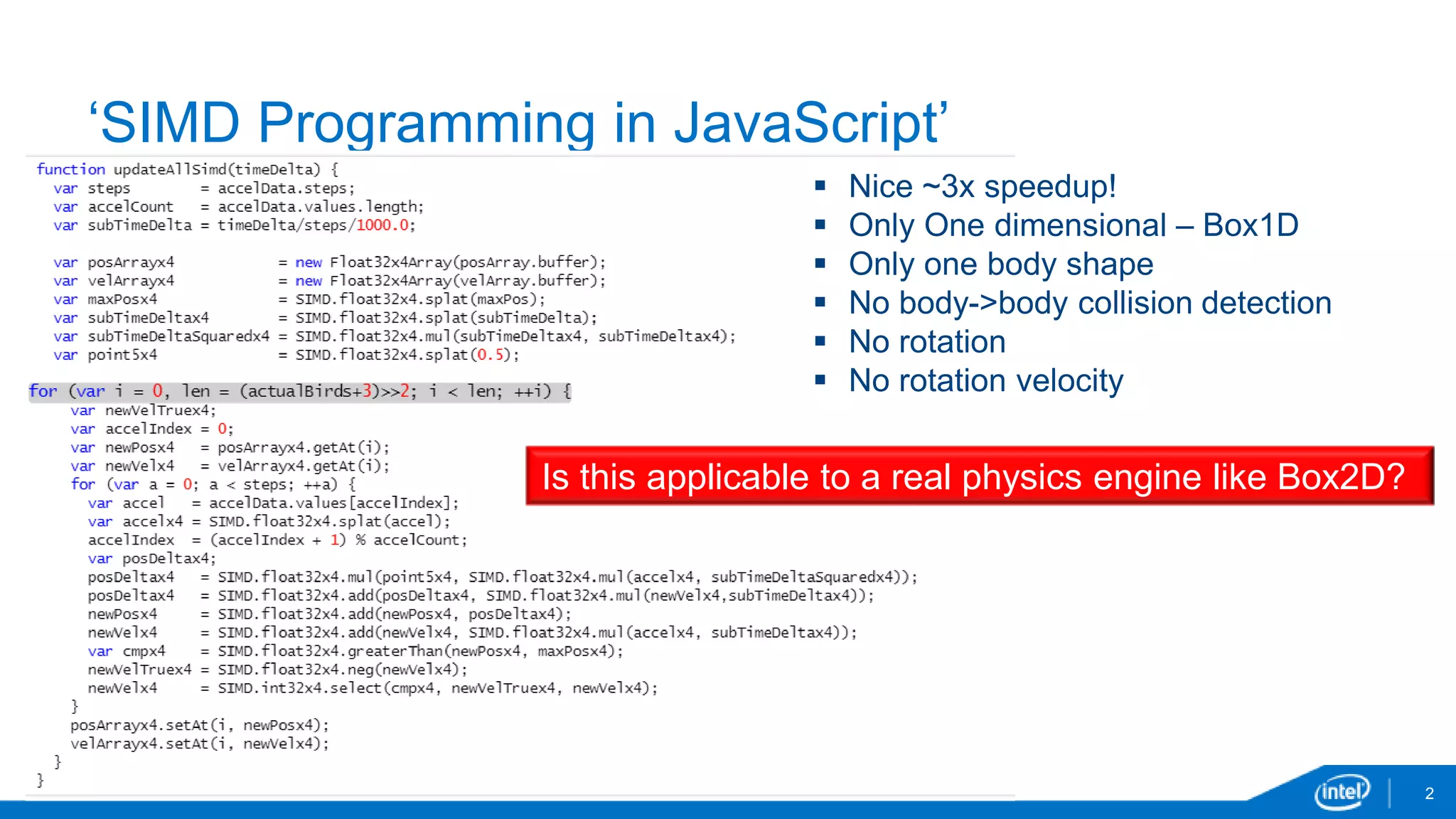
![SIMD in JavaScript
14
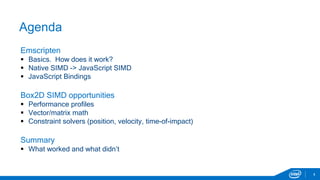
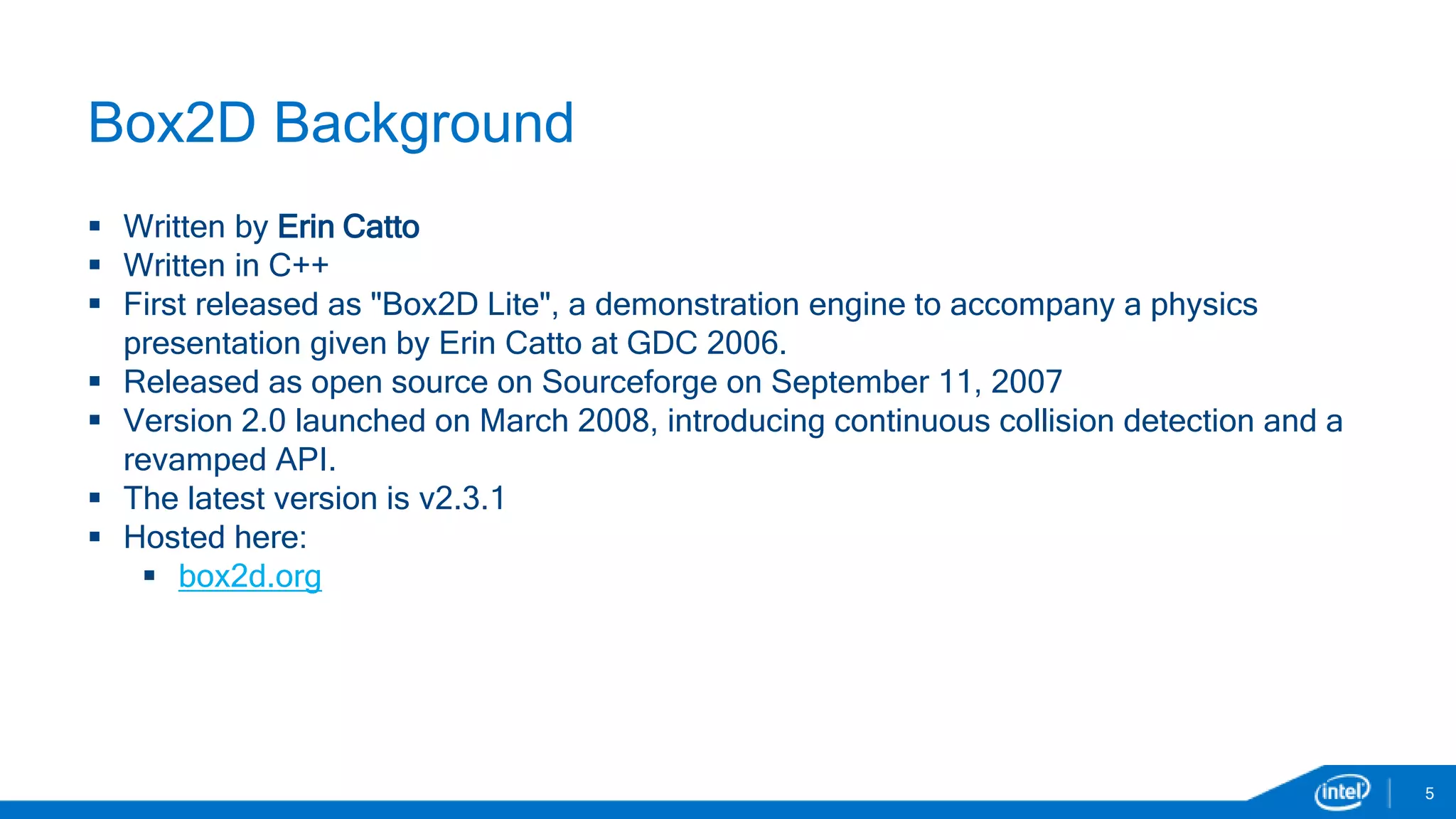
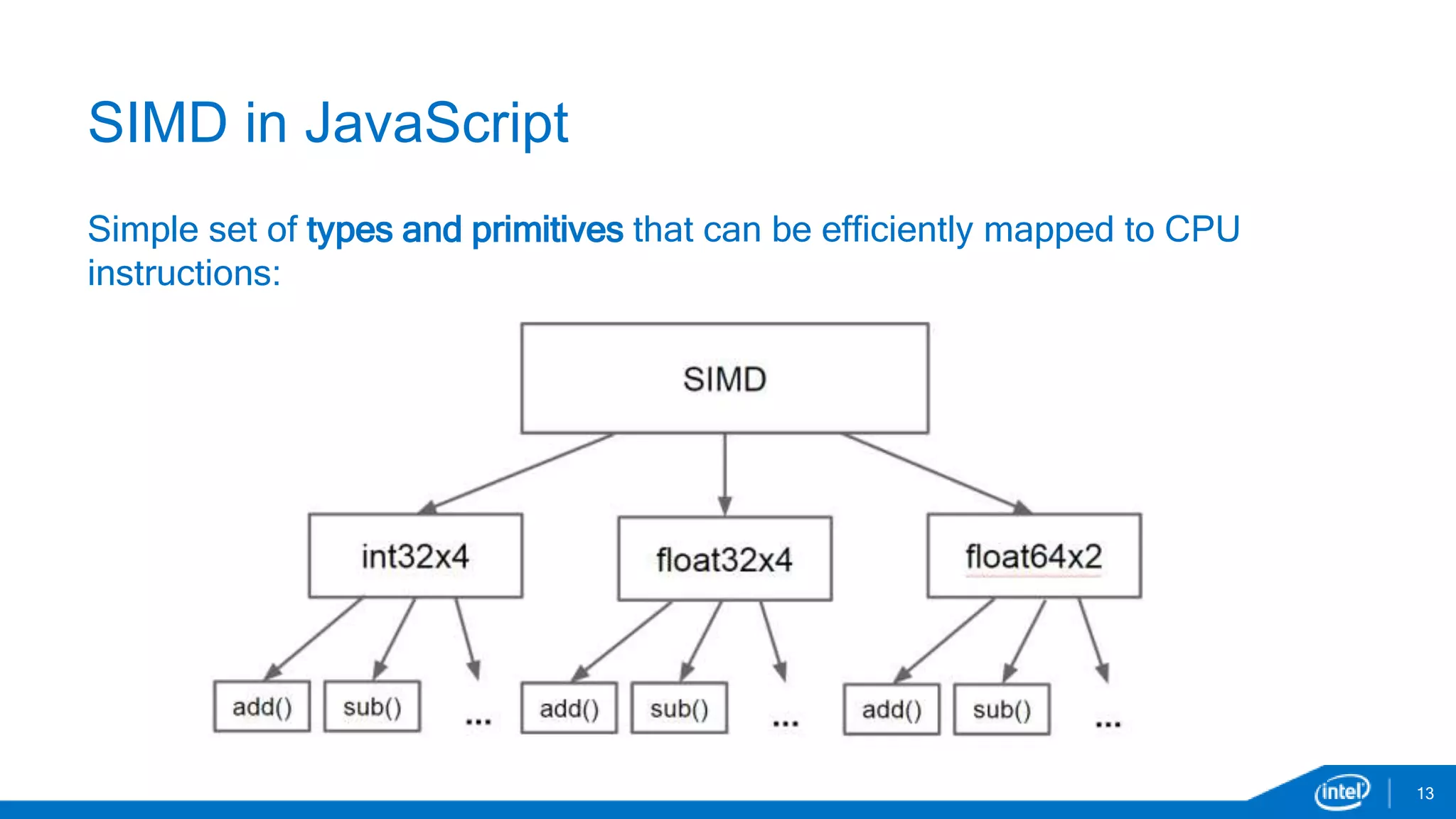
SIMD in C/C++ SIMD in JavaScript
float simdAverage(float *src, int len) {
__m128 sumx4 = _mm_set_ps1(0.0f);
for (int i = 0; i < len; i += 4) {
sumx4 = _mm_add_ps(
sumx4, _mm_loadu_ps(src));
src += 4;
}
float sumx4_mem[4];
_mm_storeu_ps(sumx4_mem, sumx4);
return (sumx4_mem[0] + sumx4_mem[1] +
sumx4_mem[2] + sumx4_mem[3])/len;
}
function simdAverage(src, len) {
var sumx4 = SIMD.float32x4.splat(0.0);
var srcx4 = new Float32x4Array(src.buffer);
for (var i = 0, n = len/4; i < n; ++i) {
sumx4 = SIMD.float32x4.add(
sumx4, srcx4.getAt(i));
}
return (sumx4.x + sumx4.y +
sumx4.z + sumx4.w)/len;
}
SIMD offers a potential ~4x speedup](https://image.slidesharecdn.com/peterjensenhtml5-box2d-141212124400-conversion-gate01/85/Box2D-with-SIMD-in-JavaScript-15-320.jpg)
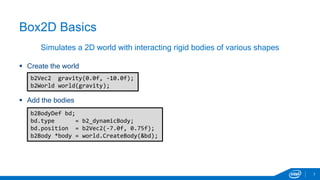
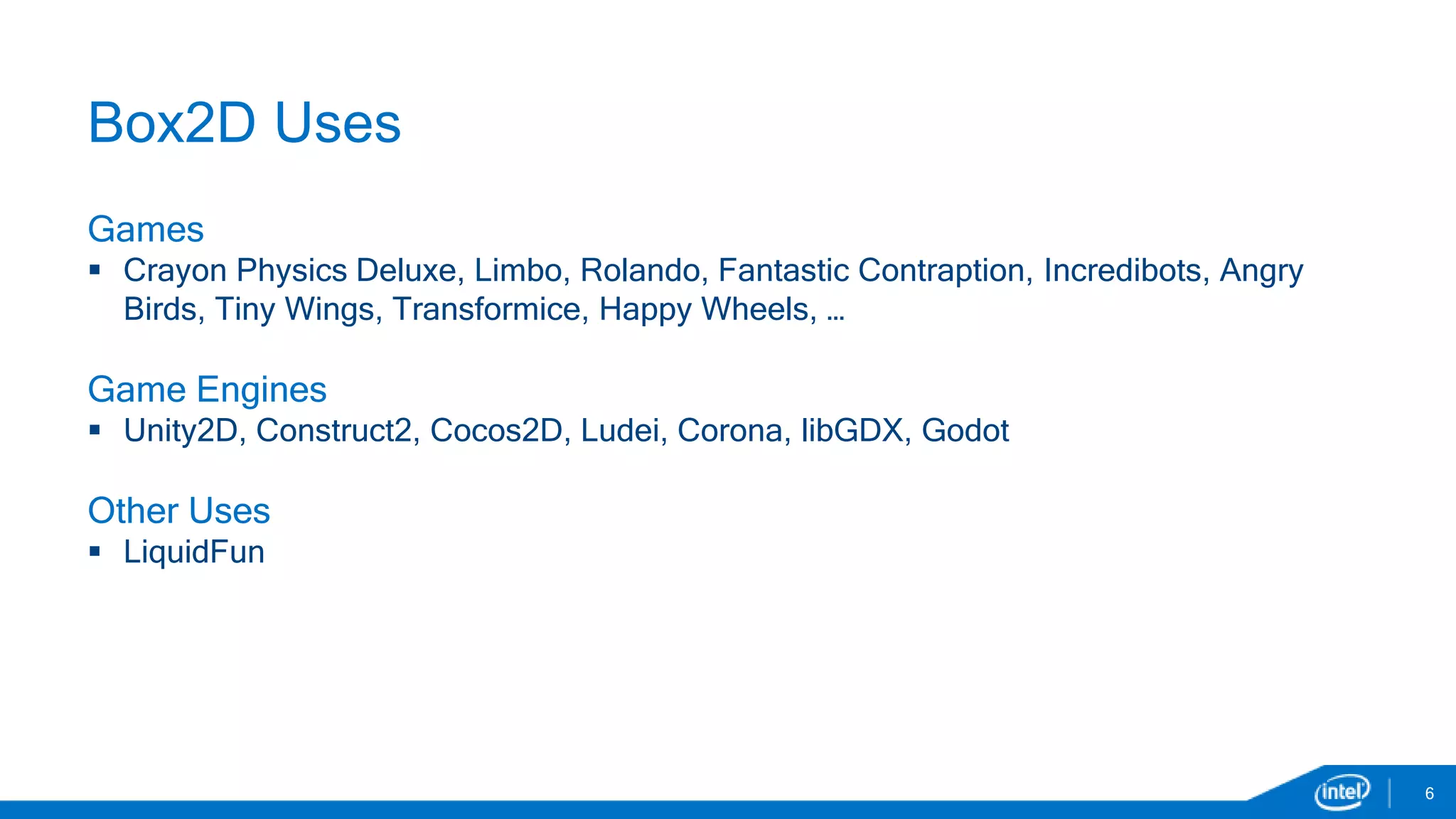
![Emscripten
Developed by Alon Zakai/Mozilla:
github.com/kripken/emscripten
Compiles LLVM bitcode to JavaScript
Supports most of _mm_X_ps() intrinsics
16
float simdAverage(float *src, int len) {
__m128 sumx4 = _mm_set_ps1(0.0f);
for (int i = 0; i < len; i += 4) {
__m128 v = _mm_load_ps(src + i);
sumx4 = _mm_add_ps(sumx4, v);
}
float sumx4_mem[4];
_mm_store_ps(sumx4_mem, sumx4);
return (sumx4_mem[0] + sumx4_mem[1] +
sumx4_mem[2] + sumx4_mem[3])/len;
}
function _simdAverage($src, $len) {
$src = $src | 0;
$len = $len | 0;
var $add$i = SIMD_float32x4(0, 0, 0, 0),
$i$011 = 0,
$sumx4$0$lcssa = SIMD_float32x4(0, 0, 0, 0),
$sumx4$010 = SIMD_float32x4(0, 0, 0, 0),
sp = 0;
sp = STACKTOP;
if (($len | 0) > 0) {
$i$011 = 0;
$sumx4$010 = SIMD_float32x4_splat(Math_fround(0));
while (1) {
$add$i = SIMD_float32x4_add(
$sumx4$010,
SIMD_float32x4_load(
buffer, $src + ($i$011 << 2) | 0));
$i$011 = $i$011 + 4 | 0;
if (($i$011 | 0) >= ($len | 0)) {
$sumx4$0$lcssa = $add$i;
break;
} else $sumx4$010 = $add$i;
}
} else
$sumx4$0$lcssa = SIMD_float32x4_splat(Math_fround(0));
STACKTOP = sp;
return +((+$sumx4$0$lcssa.w +
(+$sumx4$0$lcssa.z +
(+$sumx4$0$lcssa.x +
+$sumx4$0$lcssa.y))) / +($len | 0));
}
% emcc –O2 –g demo02.c](https://image.slidesharecdn.com/peterjensenhtml5-box2d-141212124400-conversion-gate01/85/Box2D-with-SIMD-in-JavaScript-17-320.jpg)





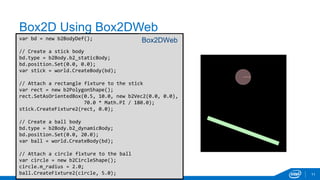
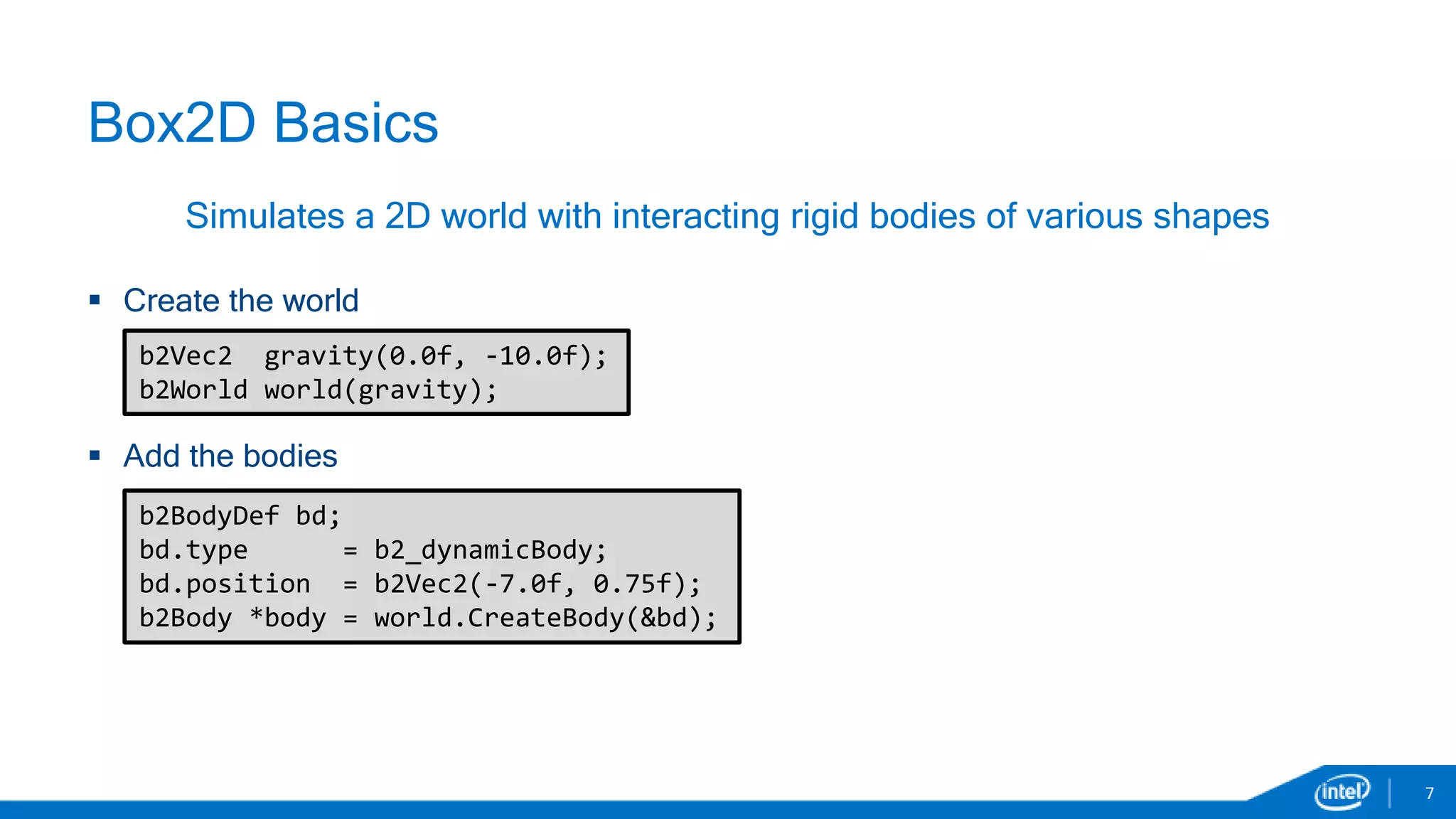
![Position Constraint Solver - simplified
22
bool b2ContactSolver::SolvePositionConstraints() {
for (int32 i = 0; i < m_count; ++i) {
b2ContactPositionConstraint* pc = m_positionConstraints + i;
int32 indexA = pc->indexA;
int32 indexB = pc->indexB;
int32 pointCount = pc->pointCount;
b2Vec2 cA = m_positions[indexA].c;
b2Vec2 cB = m_positions[indexB].c;
for (int32 j = 0; j < pointCount; ++j) {
// A bunch of float32 vector math based on
// mass, inertia, center-of-mass positions,
// and contact position
cA -= mA * P;
cB += mB * P;
}
m_positions[indexA].c = cA;
m_positions[indexB].c = cB;
}
}
“Holy Grail of Vectorization”
Reduce iteration count
by vector width (4)
Enemies of Vectorization
• Control flow in loop
• Data dependencies
between iterations
Applied solutions
• Specialize
• Sort data to minimize
dependencies within
groups of 4](https://image.slidesharecdn.com/peterjensenhtml5-box2d-141212124400-conversion-gate01/85/Box2D-with-SIMD-in-JavaScript-23-320.jpg)
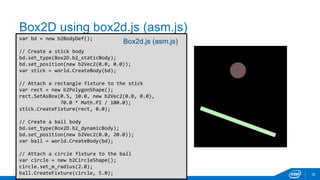
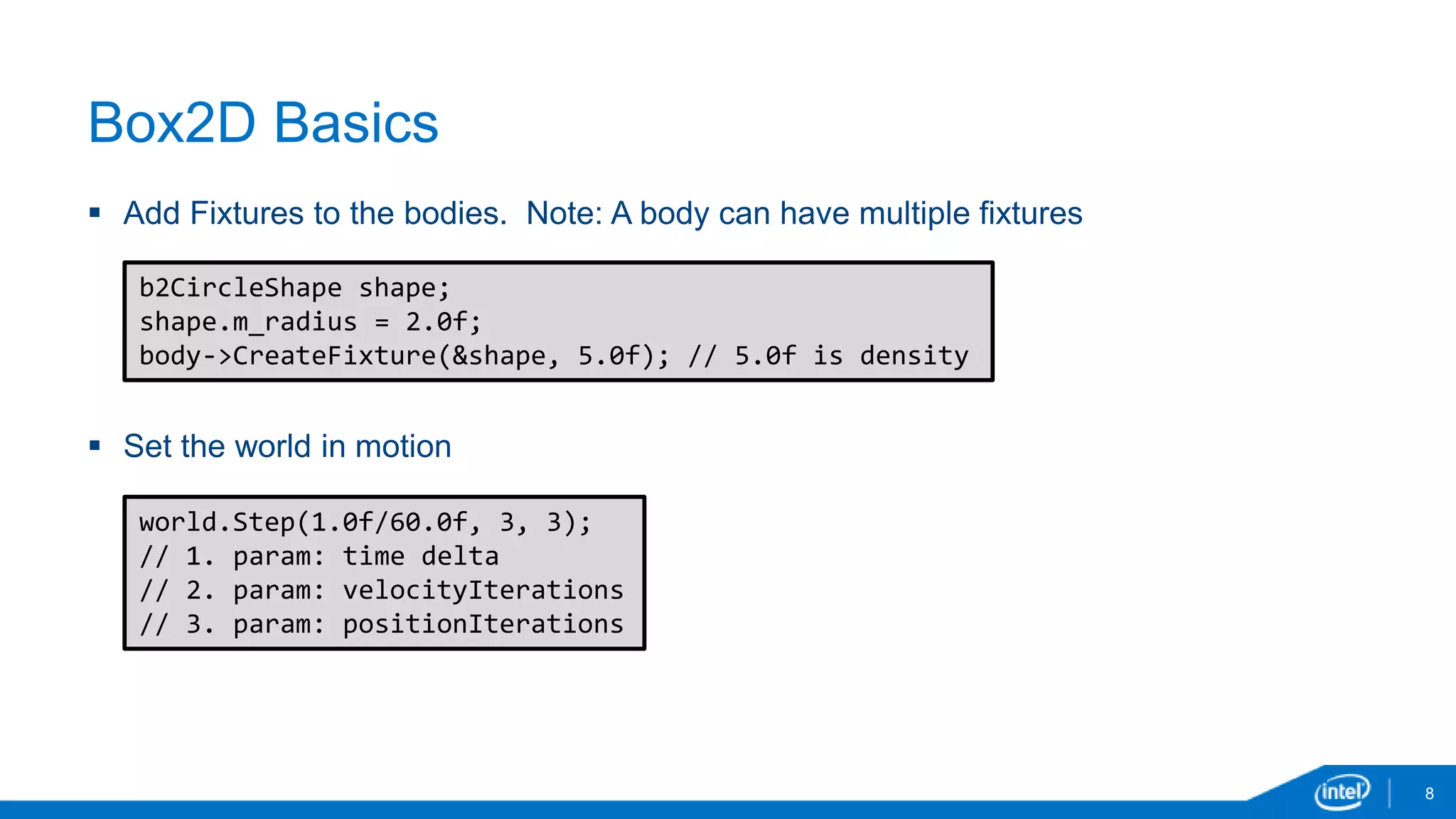
![Position Constraint Solver - specialized
23
float32 b2ContactSolver::SimdSolvePositionConstraints() {
for (int32 i = 0; i < (m_count-3); i+=4) {
b2ContactPositionConstraint *pc = m_positionConstraints + i;
int32 indexA[4] = {pc->indexA, (pc+1)->indexA, (pc+2)->indexA, (pc+3)->indexA};
int32 indexB[4] = {pc->indexB, (pc+1)->indexB, (pc+2)->indexB, (pc+3)->indexB};
if (IndexOverlap(indexA, indexB)) {
// doesn't deal with aliasing between the 4 lanes
COUNTER_INC(indexOverlap);
float32 minSep = SolveHelper(i, 4);
minSeparation = b2Min(minSeparation, minSep);
continue;
}
else {
COUNTER_INC(noIndexOverlap);
}
…
}
}](https://image.slidesharecdn.com/peterjensenhtml5-box2d-141212124400-conversion-gate01/85/Box2D-with-SIMD-in-JavaScript-24-320.jpg)

![Position Constraint Solver – Sample conversions
25
float32 rnA = b2Cross(rA, normal);
float32 rnA[4];
rnA[0] = b2Cross(rA[0], normal[0]);
rnA[1] = b2Cross(rA[1], normal[1]);
rnA[2] = b2Cross(rA[2], normal[2]);
rnA[3] = b2Cross(rA[3], normal[3]);
__m128 rnA4 = b2Cross4(
rAx4, rAy4,
normalx4, normaly4);
float32 b2Cross(const b2Vec2& a, const b2Vec2& b) {
__m128 b2Cross4(const __m128 &ax4, const __m128 &ay4,
const __m128 &bx4, const __m128 &by4) {
return _mm_sub_ps(
_mm_mul_ps(ax4, by4), _mm_mul_ps(ay4, bx4));
}
return a.x * b.y - a.y * b.x;
}
Original Code in loop
After manual unrolling by 4
After merging into SIMD
b2Cross()
b2Cross4()](https://image.slidesharecdn.com/peterjensenhtml5-box2d-141212124400-conversion-gate01/85/Box2D-with-SIMD-in-JavaScript-26-320.jpg)


![SIMD in JavaScript
14
SIMD in C/C++ SIMD in JavaScript
float simdAverage(float *src, int len) {
__m128 sumx4 = _mm_set_ps1(0.0f);
for (int i = 0; i < len; i += 4) {
sumx4 = _mm_add_ps(
sumx4, _mm_loadu_ps(src));
src += 4;
}
float sumx4_mem[4];
_mm_storeu_ps(sumx4_mem, sumx4);
return (sumx4_mem[0] + sumx4_mem[1] +
sumx4_mem[2] + sumx4_mem[3])/len;
}
function simdAverage(src, len) {
var sumx4 = SIMD.float32x4.splat(0.0);
var srcx4 = new Float32x4Array(src.buffer);
for (var i = 0, n = len/4; i < n; ++i) {
sumx4 = SIMD.float32x4.add(
sumx4, srcx4.getAt(i));
}
return (sumx4.x + sumx4.y +
sumx4.z + sumx4.w)/len;
}
SIMD offers a potential ~4x speedup](https://image.slidesharecdn.com/peterjensenhtml5-box2d-141212124400-conversion-gate01/75/Box2D-with-SIMD-in-JavaScript-15-2048.jpg)
![Emscripten
Developed by Alon Zakai/Mozilla:
github.com/kripken/emscripten
Compiles LLVM bitcode to JavaScript
Supports most of _mm_X_ps() intrinsics
16
float simdAverage(float *src, int len) {
__m128 sumx4 = _mm_set_ps1(0.0f);
for (int i = 0; i < len; i += 4) {
__m128 v = _mm_load_ps(src + i);
sumx4 = _mm_add_ps(sumx4, v);
}
float sumx4_mem[4];
_mm_store_ps(sumx4_mem, sumx4);
return (sumx4_mem[0] + sumx4_mem[1] +
sumx4_mem[2] + sumx4_mem[3])/len;
}
function _simdAverage($src, $len) {
$src = $src | 0;
$len = $len | 0;
var $add$i = SIMD_float32x4(0, 0, 0, 0),
$i$011 = 0,
$sumx4$0$lcssa = SIMD_float32x4(0, 0, 0, 0),
$sumx4$010 = SIMD_float32x4(0, 0, 0, 0),
sp = 0;
sp = STACKTOP;
if (($len | 0) > 0) {
$i$011 = 0;
$sumx4$010 = SIMD_float32x4_splat(Math_fround(0));
while (1) {
$add$i = SIMD_float32x4_add(
$sumx4$010,
SIMD_float32x4_load(
buffer, $src + ($i$011 << 2) | 0));
$i$011 = $i$011 + 4 | 0;
if (($i$011 | 0) >= ($len | 0)) {
$sumx4$0$lcssa = $add$i;
break;
} else $sumx4$010 = $add$i;
}
} else
$sumx4$0$lcssa = SIMD_float32x4_splat(Math_fround(0));
STACKTOP = sp;
return +((+$sumx4$0$lcssa.w +
(+$sumx4$0$lcssa.z +
(+$sumx4$0$lcssa.x +
+$sumx4$0$lcssa.y))) / +($len | 0));
}
% emcc –O2 –g demo02.c](https://image.slidesharecdn.com/peterjensenhtml5-box2d-141212124400-conversion-gate01/75/Box2D-with-SIMD-in-JavaScript-17-2048.jpg)
![Position Constraint Solver - simplified
22
bool b2ContactSolver::SolvePositionConstraints() {
for (int32 i = 0; i < m_count; ++i) {
b2ContactPositionConstraint* pc = m_positionConstraints + i;
int32 indexA = pc->indexA;
int32 indexB = pc->indexB;
int32 pointCount = pc->pointCount;
b2Vec2 cA = m_positions[indexA].c;
b2Vec2 cB = m_positions[indexB].c;
for (int32 j = 0; j < pointCount; ++j) {
// A bunch of float32 vector math based on
// mass, inertia, center-of-mass positions,
// and contact position
cA -= mA * P;
cB += mB * P;
}
m_positions[indexA].c = cA;
m_positions[indexB].c = cB;
}
}
“Holy Grail of Vectorization”
Reduce iteration count
by vector width (4)
Enemies of Vectorization
• Control flow in loop
• Data dependencies
between iterations
Applied solutions
• Specialize
• Sort data to minimize
dependencies within
groups of 4](https://image.slidesharecdn.com/peterjensenhtml5-box2d-141212124400-conversion-gate01/75/Box2D-with-SIMD-in-JavaScript-23-2048.jpg)
![Position Constraint Solver - specialized
23
float32 b2ContactSolver::SimdSolvePositionConstraints() {
for (int32 i = 0; i < (m_count-3); i+=4) {
b2ContactPositionConstraint *pc = m_positionConstraints + i;
int32 indexA[4] = {pc->indexA, (pc+1)->indexA, (pc+2)->indexA, (pc+3)->indexA};
int32 indexB[4] = {pc->indexB, (pc+1)->indexB, (pc+2)->indexB, (pc+3)->indexB};
if (IndexOverlap(indexA, indexB)) {
// doesn't deal with aliasing between the 4 lanes
COUNTER_INC(indexOverlap);
float32 minSep = SolveHelper(i, 4);
minSeparation = b2Min(minSeparation, minSep);
continue;
}
else {
COUNTER_INC(noIndexOverlap);
}
…
}
}](https://image.slidesharecdn.com/peterjensenhtml5-box2d-141212124400-conversion-gate01/75/Box2D-with-SIMD-in-JavaScript-24-2048.jpg)
![Position Constraint Solver – Sample conversions
25
float32 rnA = b2Cross(rA, normal);
float32 rnA[4];
rnA[0] = b2Cross(rA[0], normal[0]);
rnA[1] = b2Cross(rA[1], normal[1]);
rnA[2] = b2Cross(rA[2], normal[2]);
rnA[3] = b2Cross(rA[3], normal[3]);
__m128 rnA4 = b2Cross4(
rAx4, rAy4,
normalx4, normaly4);
float32 b2Cross(const b2Vec2& a, const b2Vec2& b) {
__m128 b2Cross4(const __m128 &ax4, const __m128 &ay4,
const __m128 &bx4, const __m128 &by4) {
return _mm_sub_ps(
_mm_mul_ps(ax4, by4), _mm_mul_ps(ay4, bx4));
}
return a.x * b.y - a.y * b.x;
}
Original Code in loop
After manual unrolling by 4
After merging into SIMD
b2Cross()
b2Cross4()](https://image.slidesharecdn.com/peterjensenhtml5-box2d-141212124400-conversion-gate01/75/Box2D-with-SIMD-in-JavaScript-26-2048.jpg)
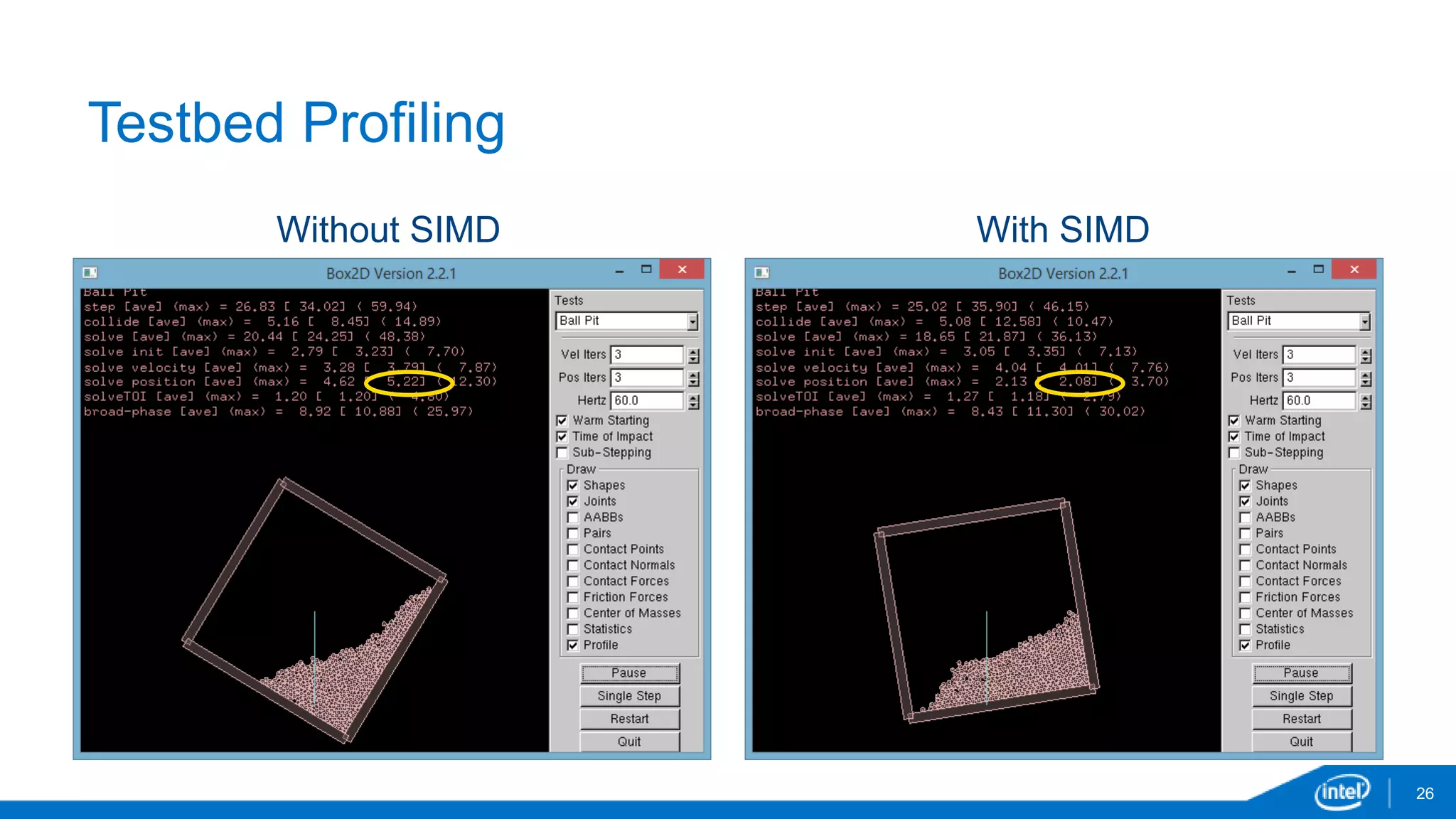

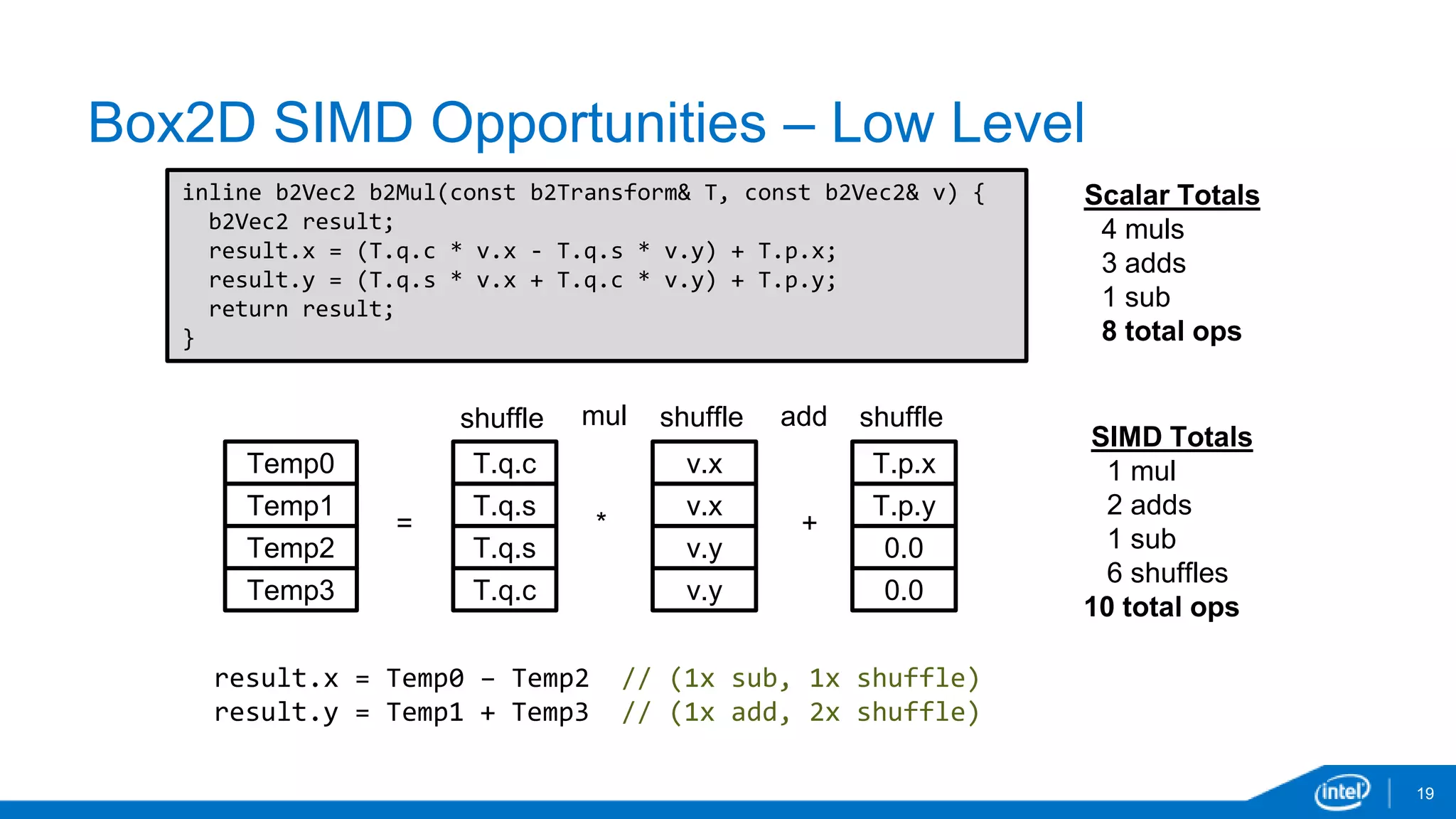
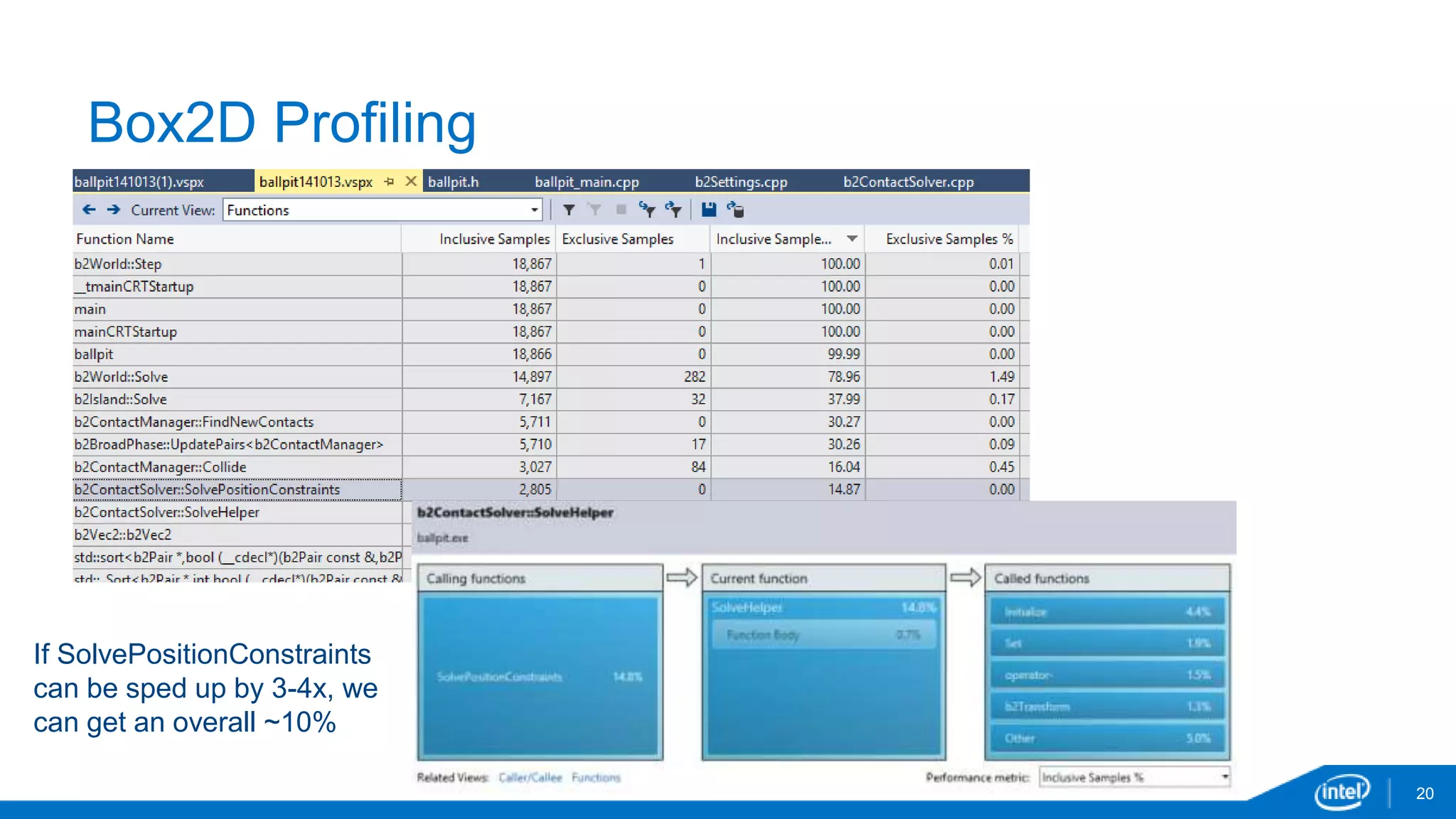
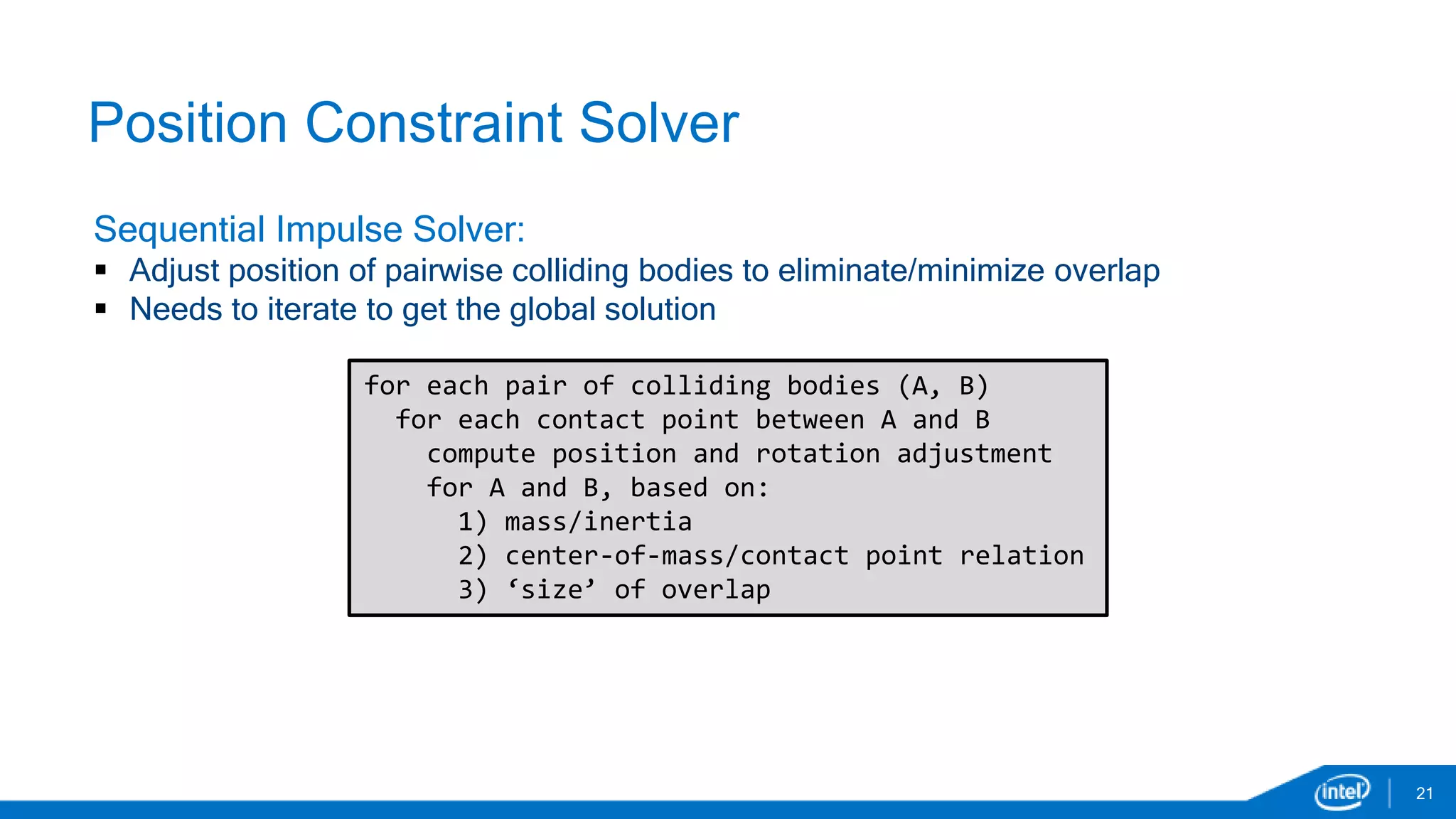
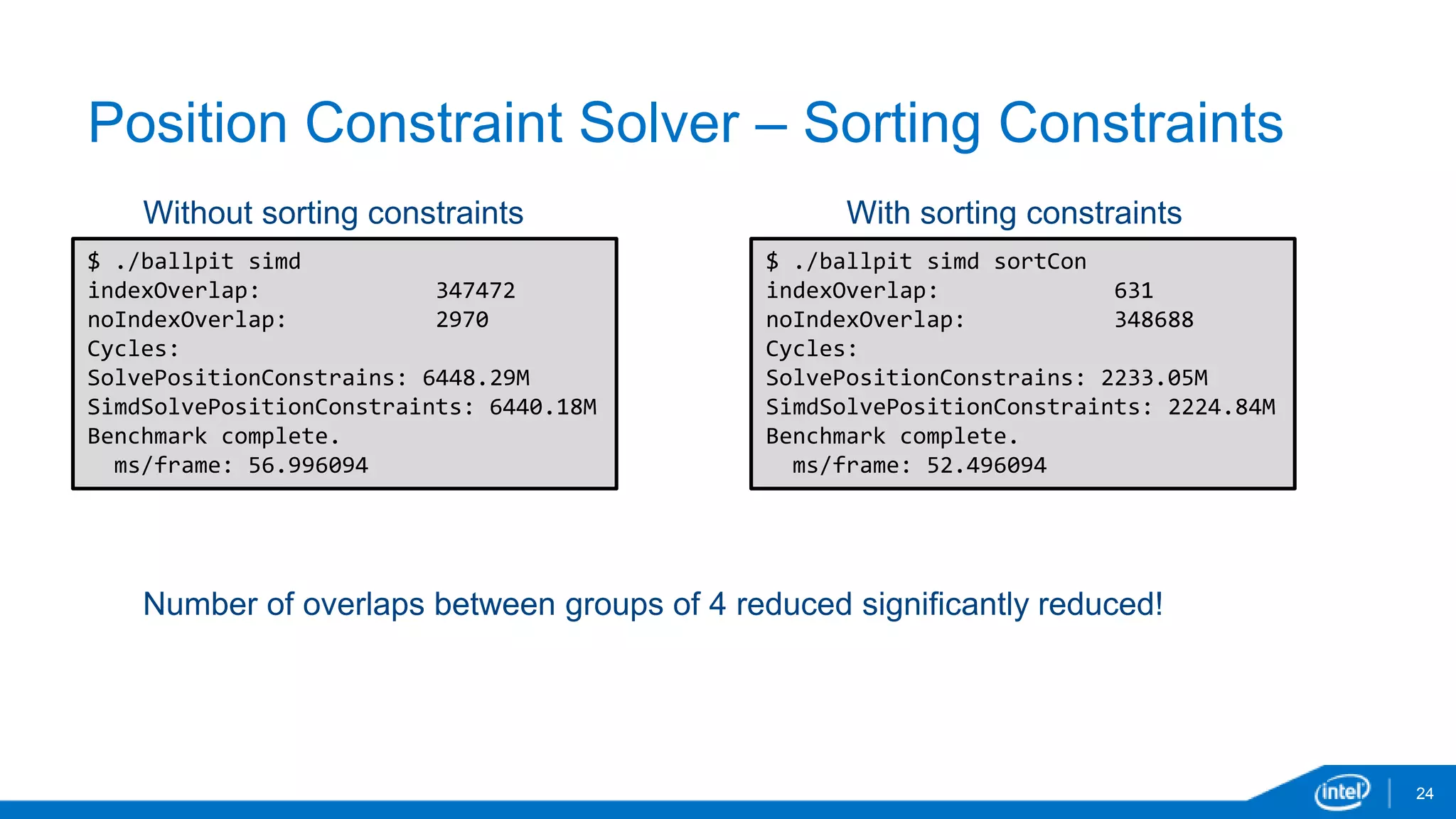
This document discusses optimizing the Box2D physics engine using SIMD in JavaScript. It begins with background on Box2D, describing how it simulates 2D physics with rigid bodies. It then covers SIMD in JavaScript, how Emscripten can compile C/C++ to JavaScript with SIMD, and how Box2D was ported to JavaScript. Performance profiling showed the position constraint solver could benefit from SIMD. The document explores vectorizing math operations and specializing the solver to process groups of 4 constraints simultaneously.
![Writing SOLID C++ [gbgcpp meetup @ Zenseact]](https://cdn.slidesharecdn.com/ss_thumbnails/writingsolidc2-211126183844-thumbnail.jpg?width=600ounds&width=560&fit=bounds)










































































































