Downloaded 14 times
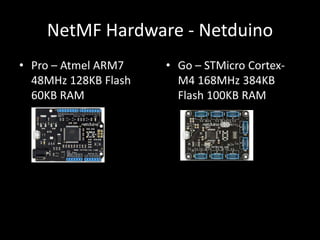






![NETMF 101 – Analog IO
• Read a voltage – not just HIGH/LOW
• Not part of core NetMF
• byte AnalogIn.Read()
• AnalogOut.Set(int value)
• AnalogOut.Set(byte[] data, int offset, int
count, int dataRate)
• Demo – Ultrasonic Distance Finder](https://image.slidesharecdn.com/netmfrobotpresentation-dddsydney-120630085019-phpapp02/85/Building-a-robot-with-the-Net-Micro-Framework-28-320.jpg)










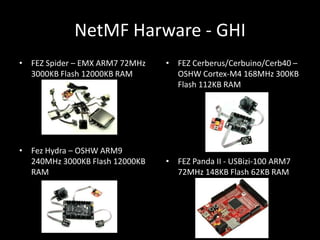
![NETMF 101 – Analog IO
• Read a voltage – not just HIGH/LOW
• Not part of core NetMF
• byte AnalogIn.Read()
• AnalogOut.Set(int value)
• AnalogOut.Set(byte[] data, int offset, int
count, int dataRate)
• Demo – Ultrasonic Distance Finder](https://image.slidesharecdn.com/netmfrobotpresentation-dddsydney-120630085019-phpapp02/75/Building-a-robot-with-the-Net-Micro-Framework-28-2048.jpg)




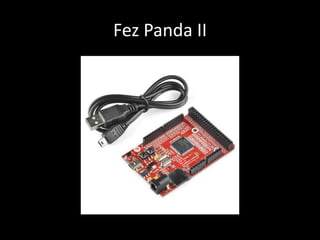
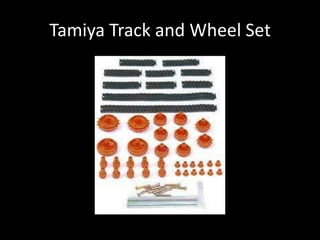
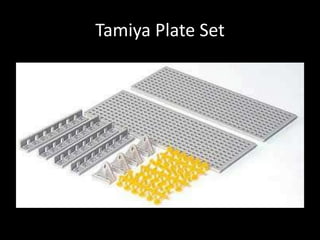
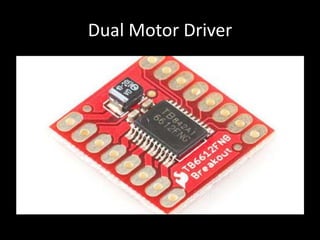
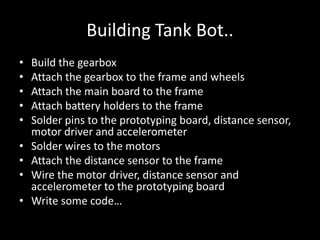
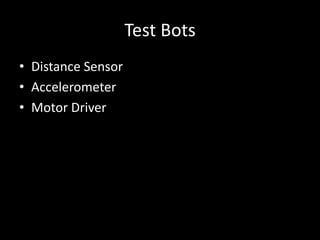
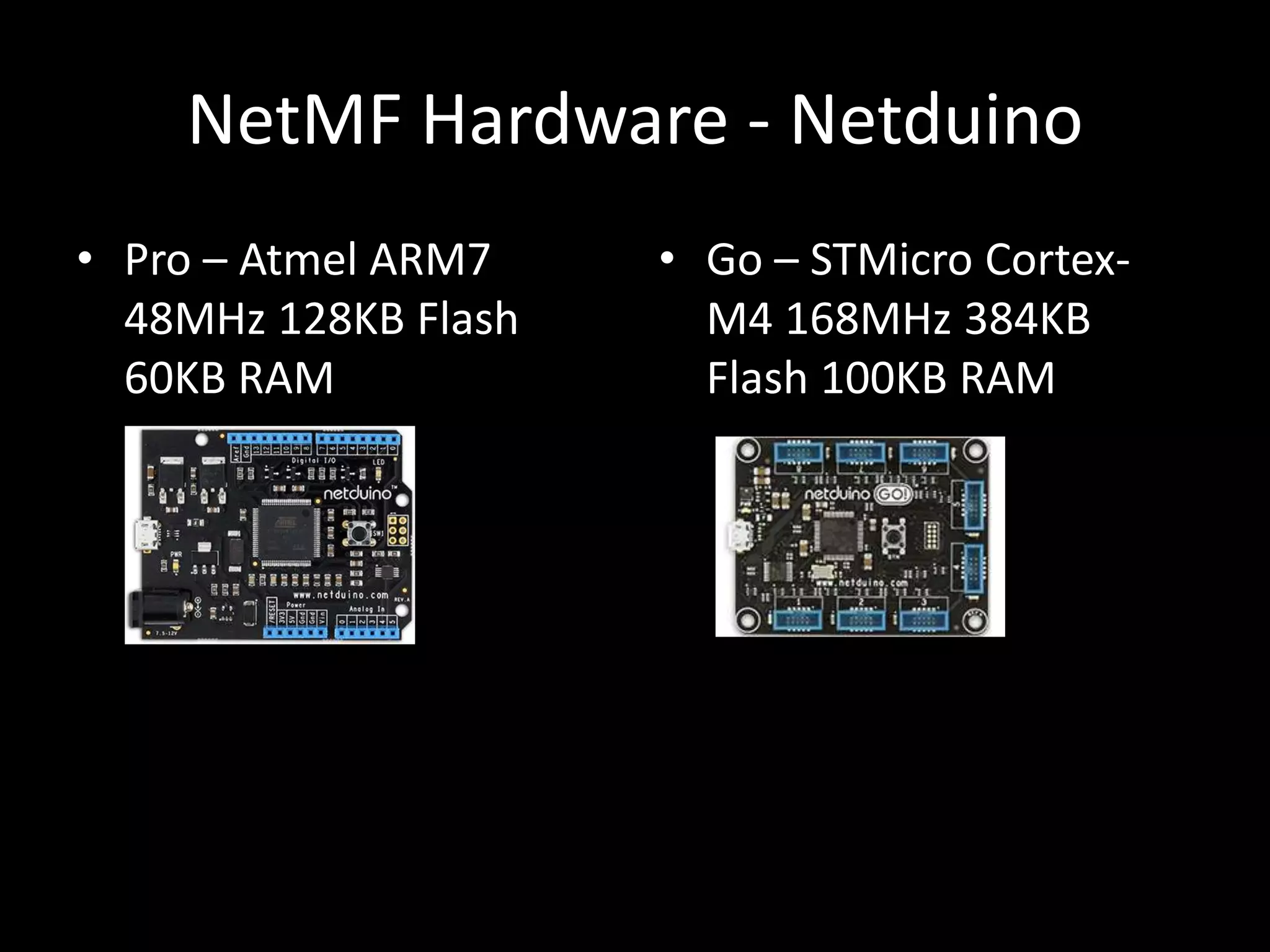
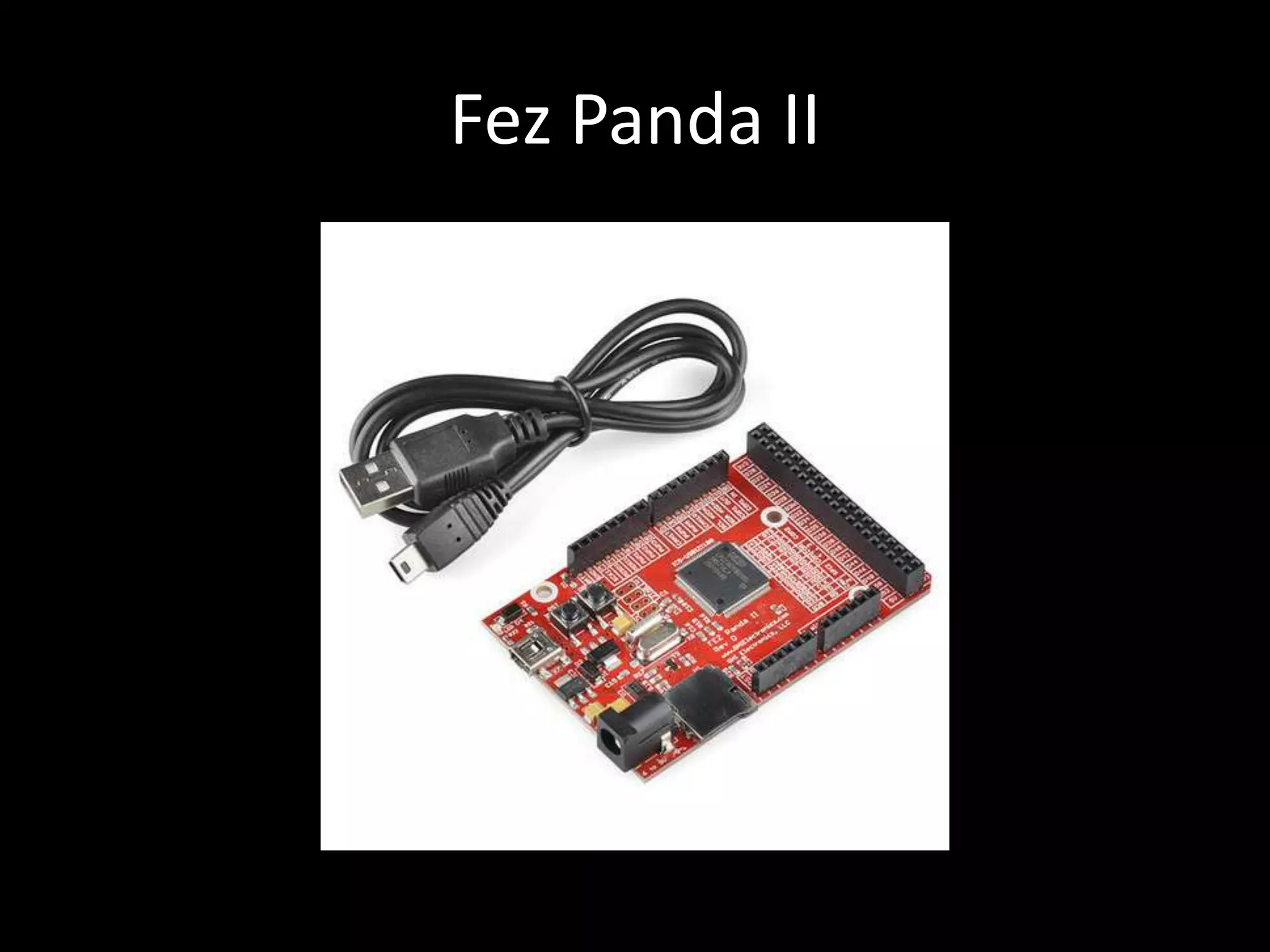
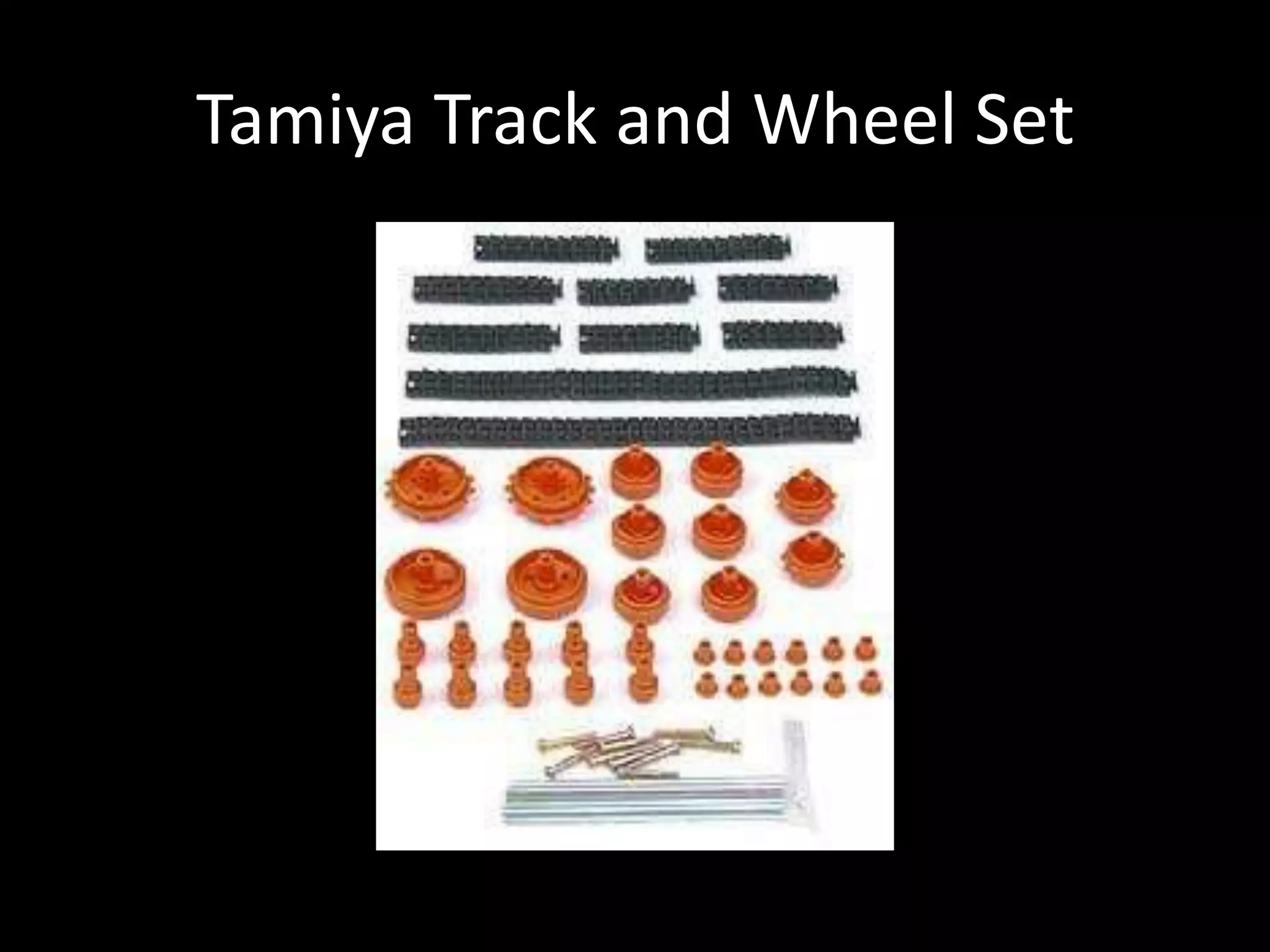
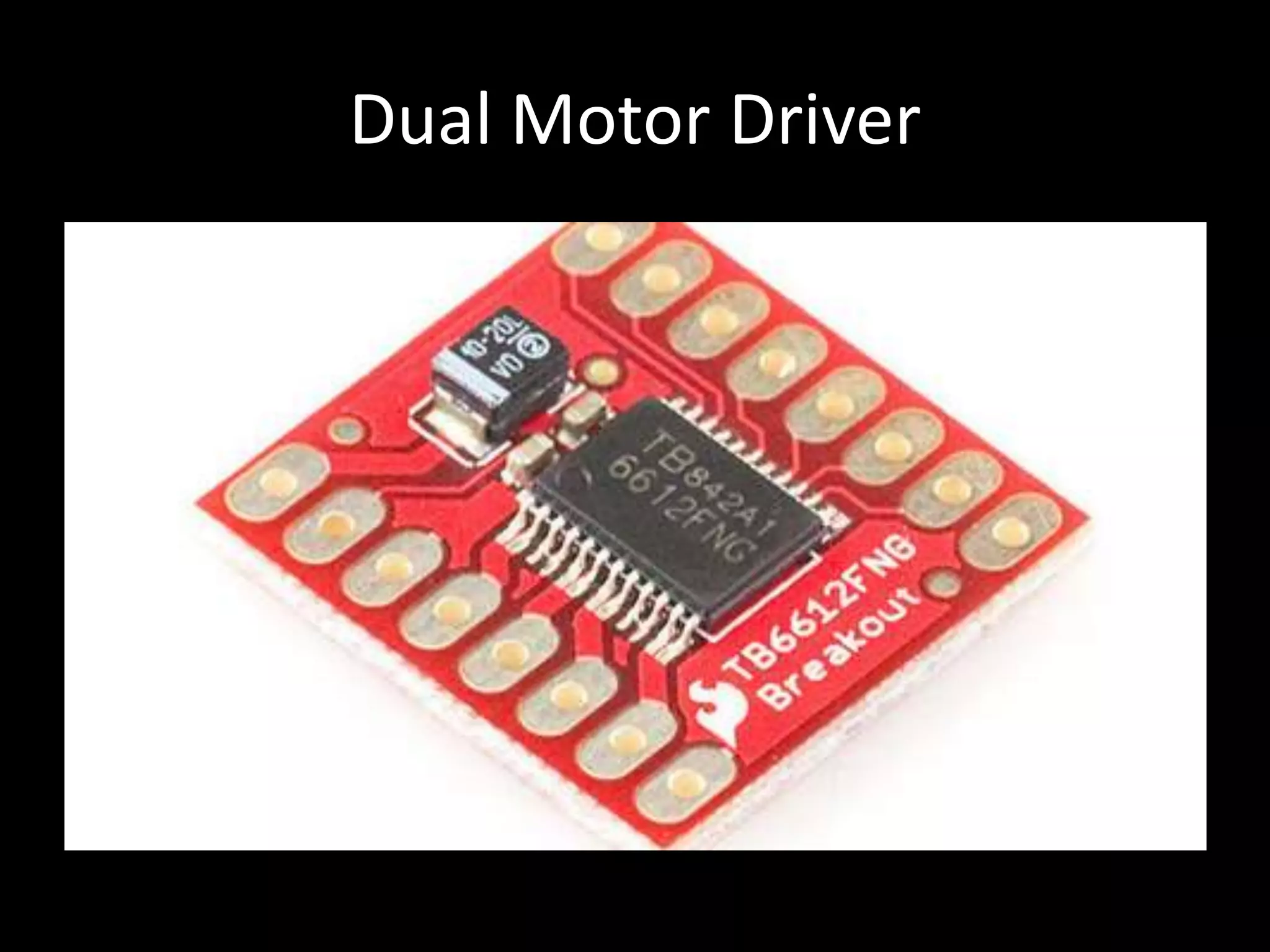
This document summarizes information about building a robot using the .NET Micro Framework (NetMF). It discusses NetMF features like using Visual Studio as an IDE and programming in C#. It also reviews some NetMF compatible hardware options and provides an example of building a tank bot robot with components like a FEZ Panda II mainboard, motors, sensors and more. Code examples are provided for using digital I/O, interrupts, analog I/O and other NetMF features to control the robot.








![[5]投影片 futurewad樹莓派研習會 141218](https://cdn.slidesharecdn.com/ss_thumbnails/5futurewad141218-141219162301-conversion-gate02-thumbnail.jpg?width=600ounds&width=560&fit=bounds)

















































![UiPath Automation Suite Installation (Hands-On) [2/3]](https://cdn.slidesharecdn.com/ss_thumbnails/automationsuitecommunitysession2-251015095633-a6d862f1-thumbnail.jpg?width=600ounds&width=560&fit=bounds)















