Download as PDF, PPTX
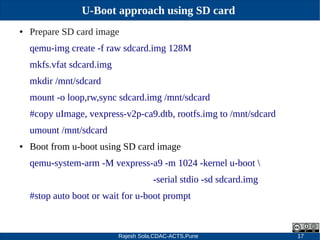
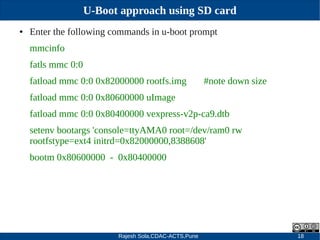
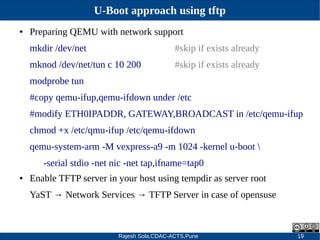
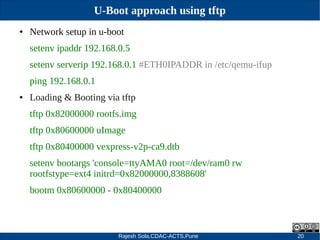
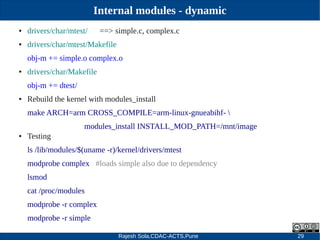
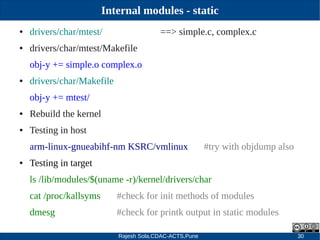
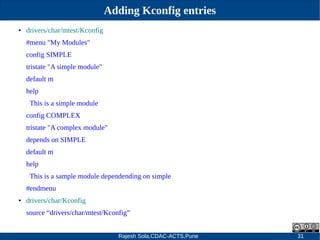
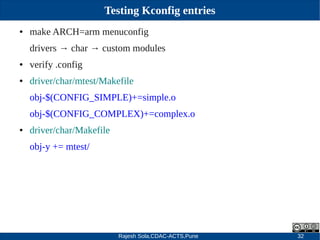
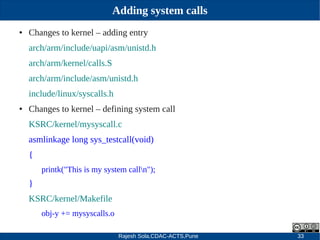
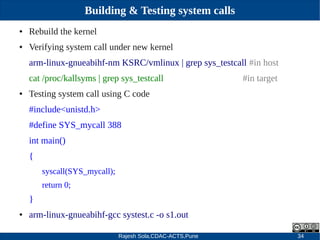
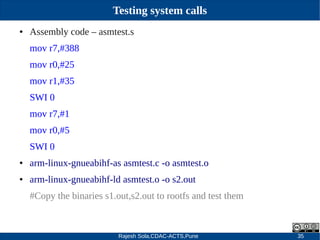
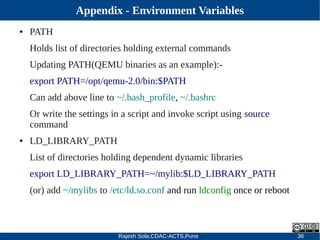

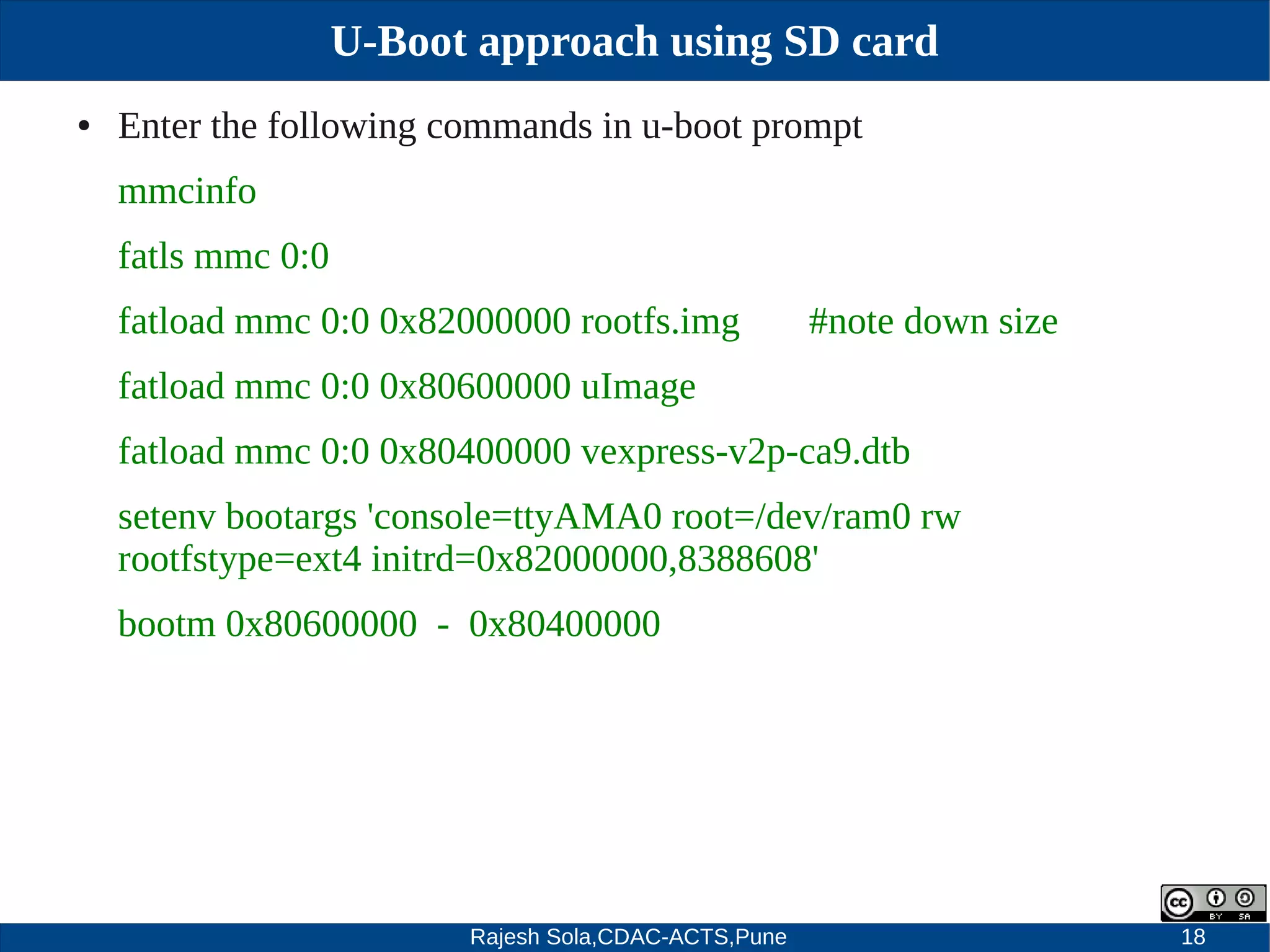
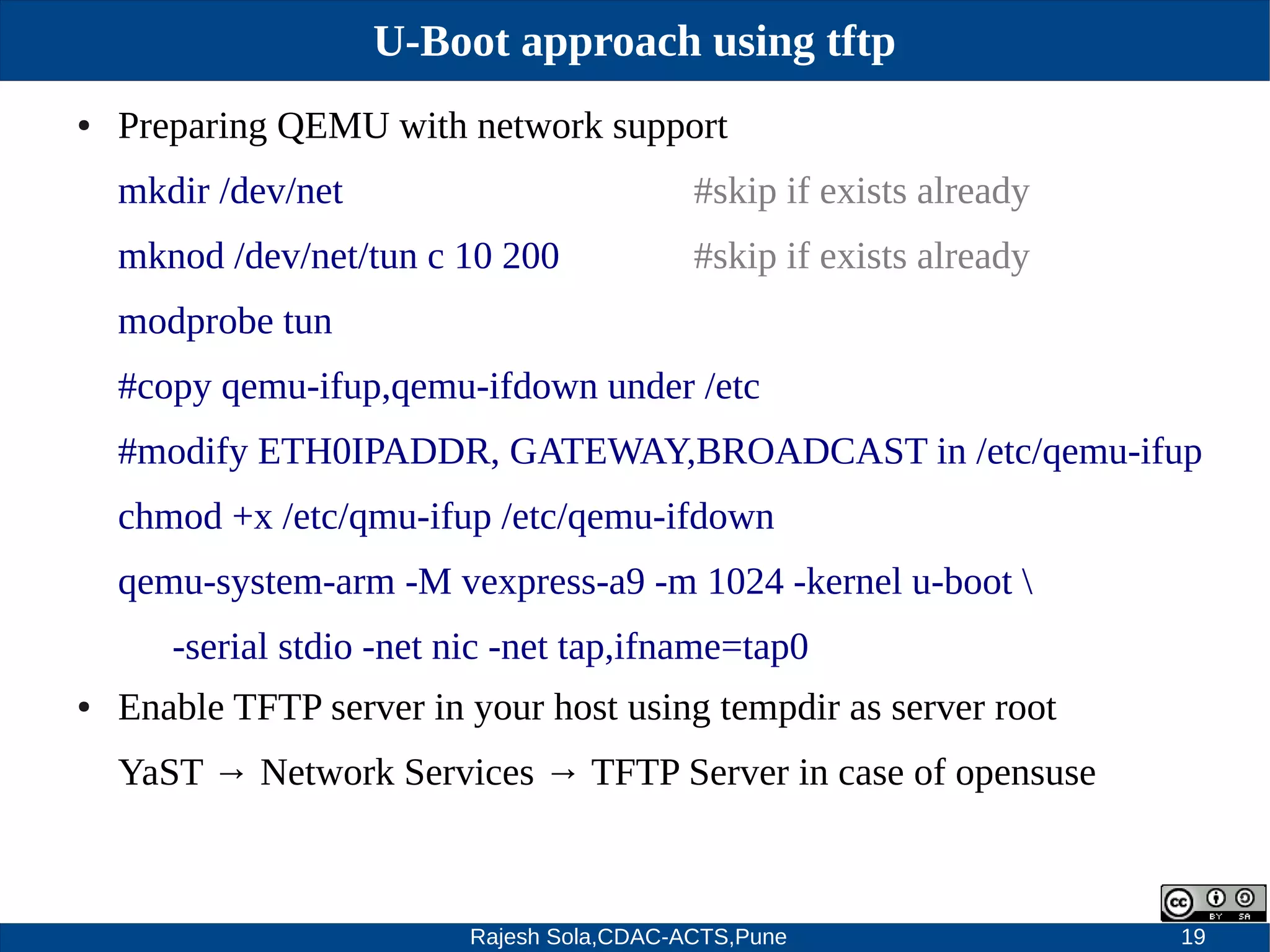
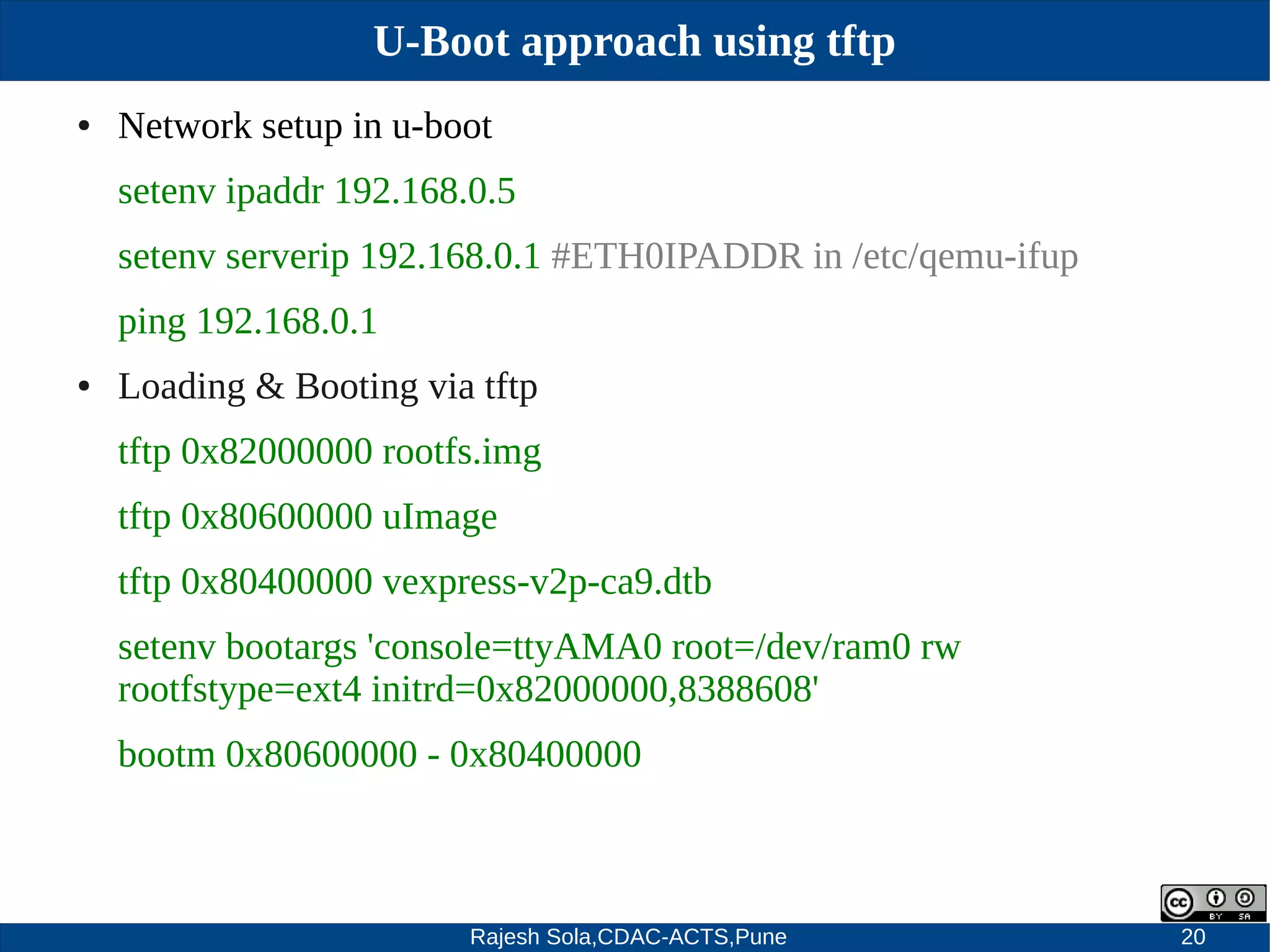
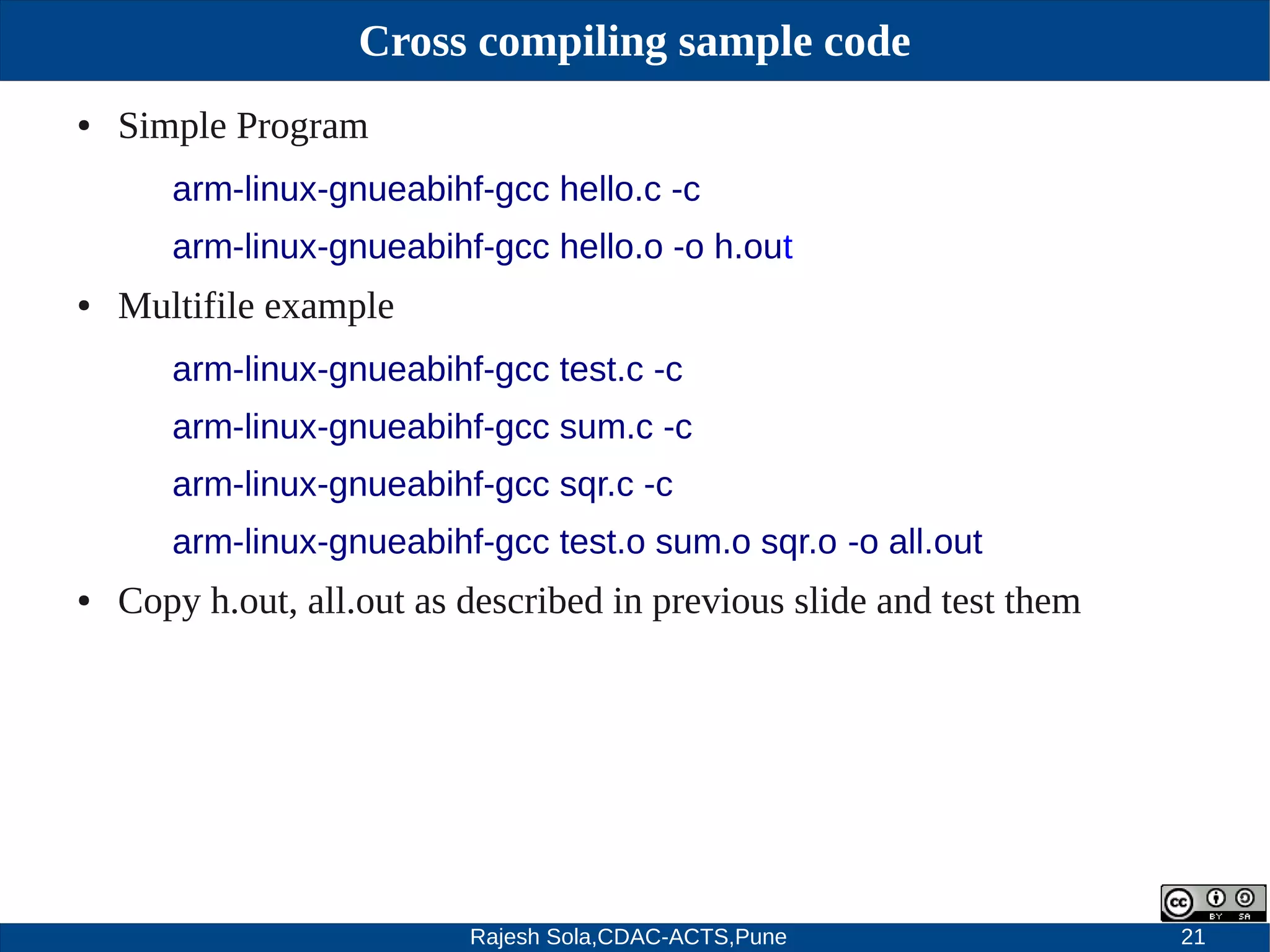
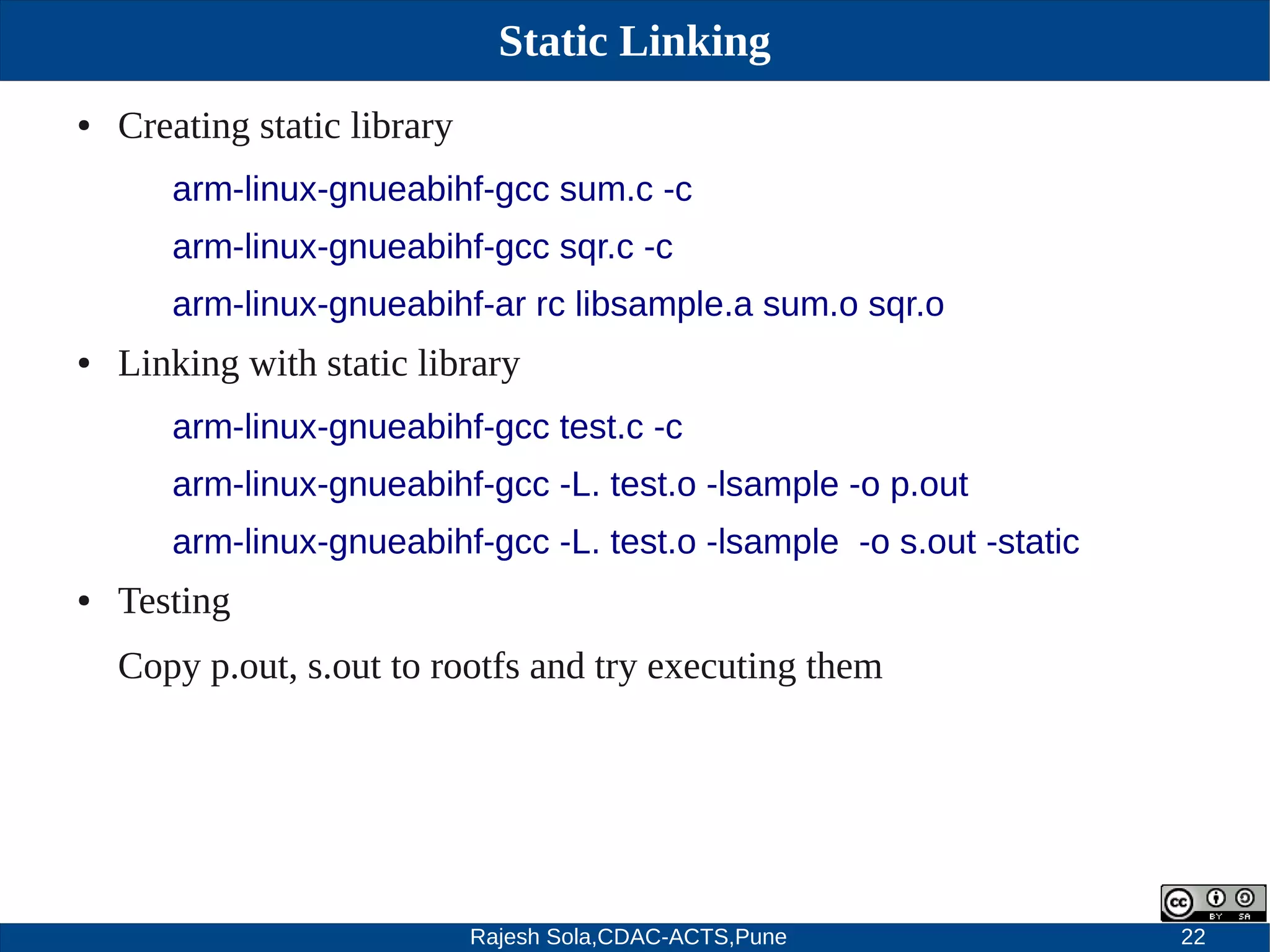
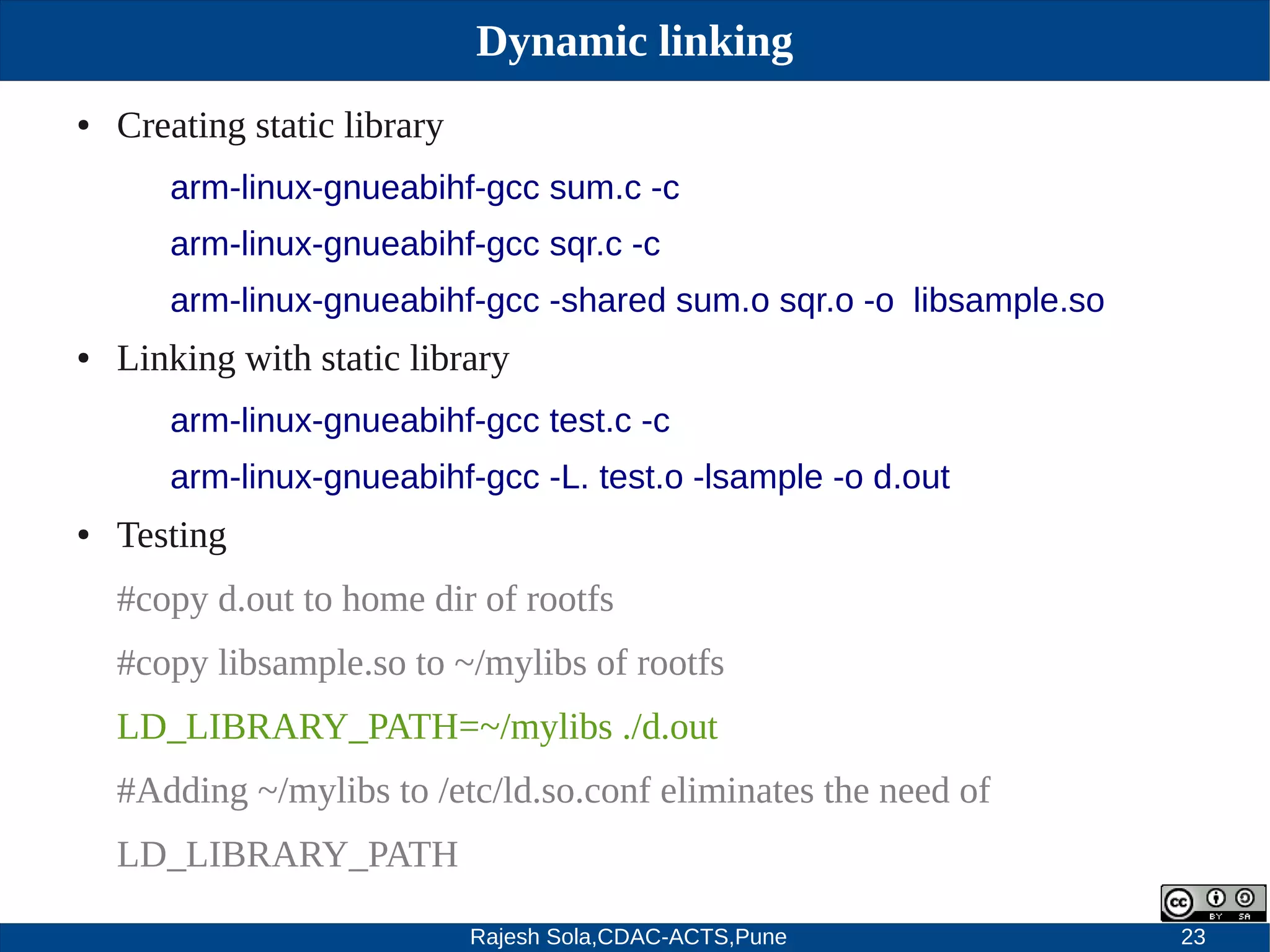

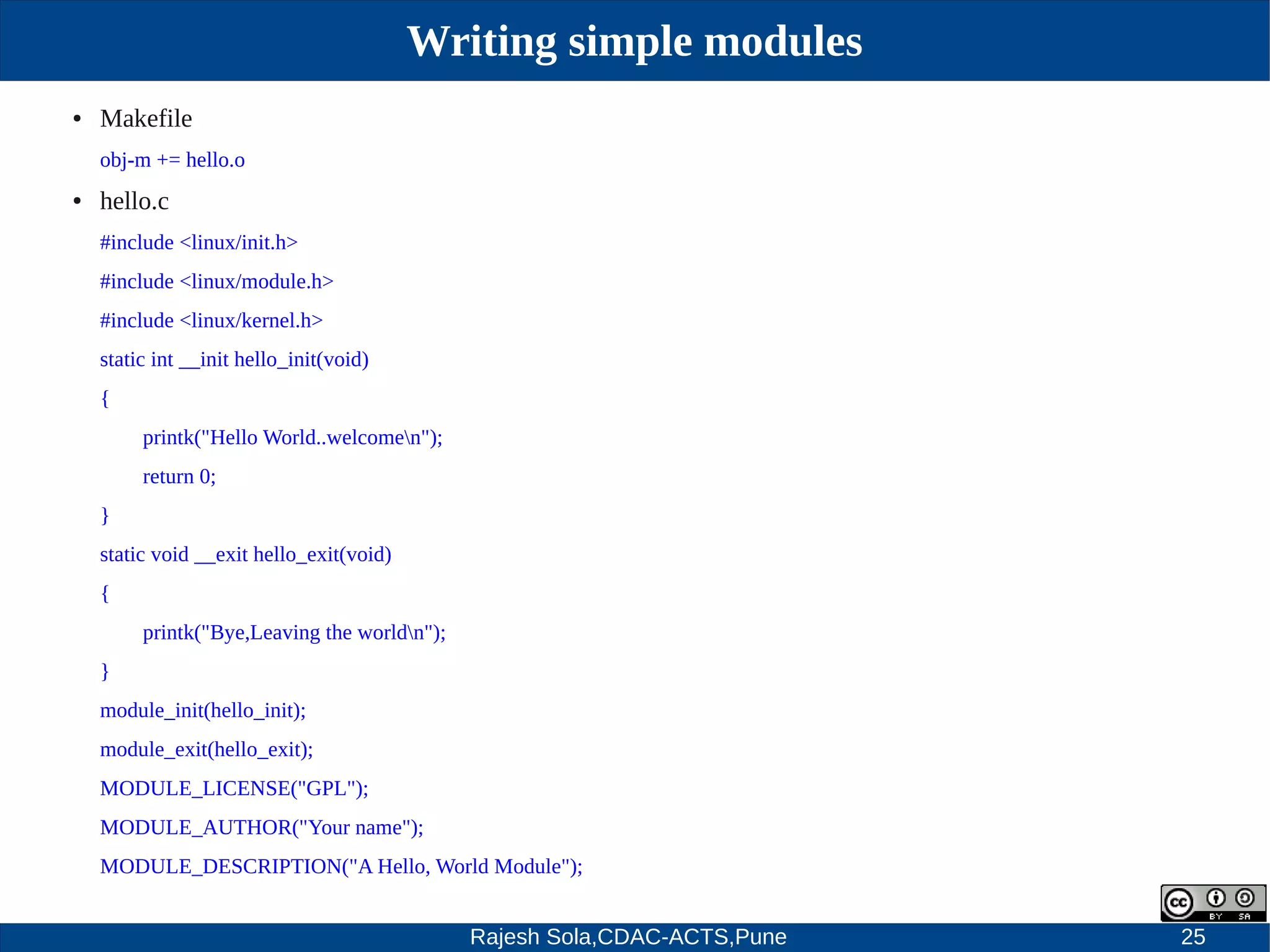
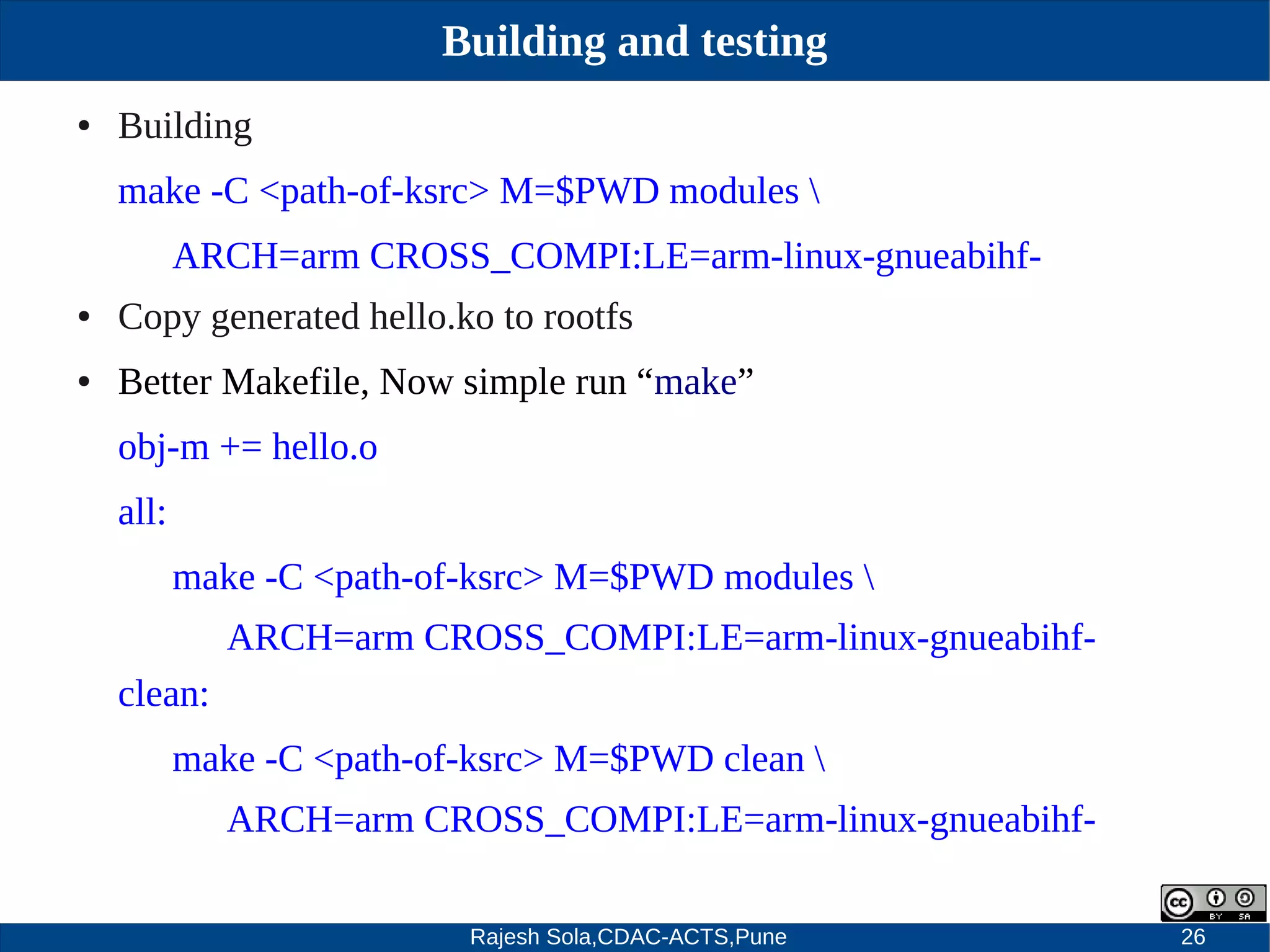
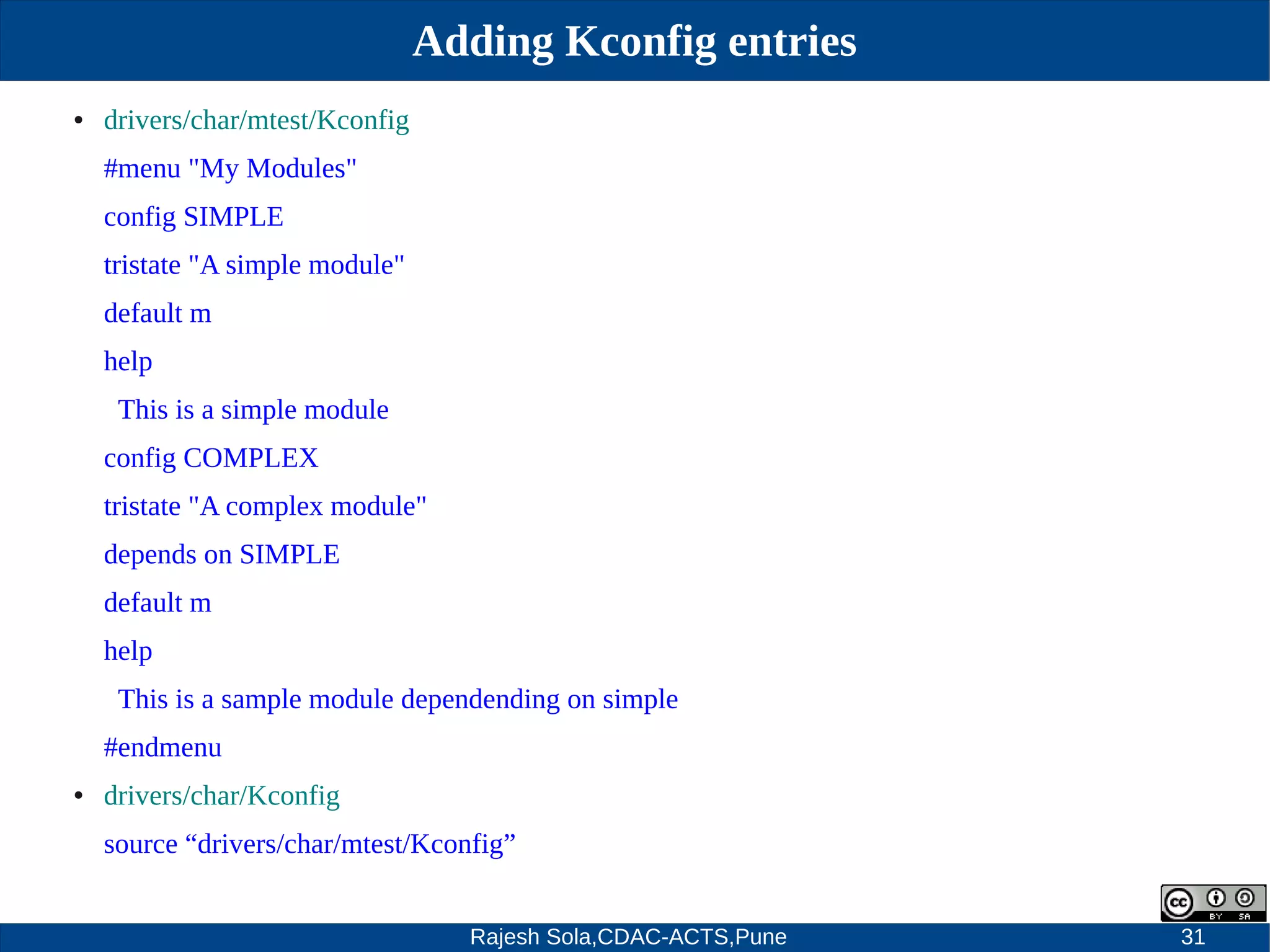
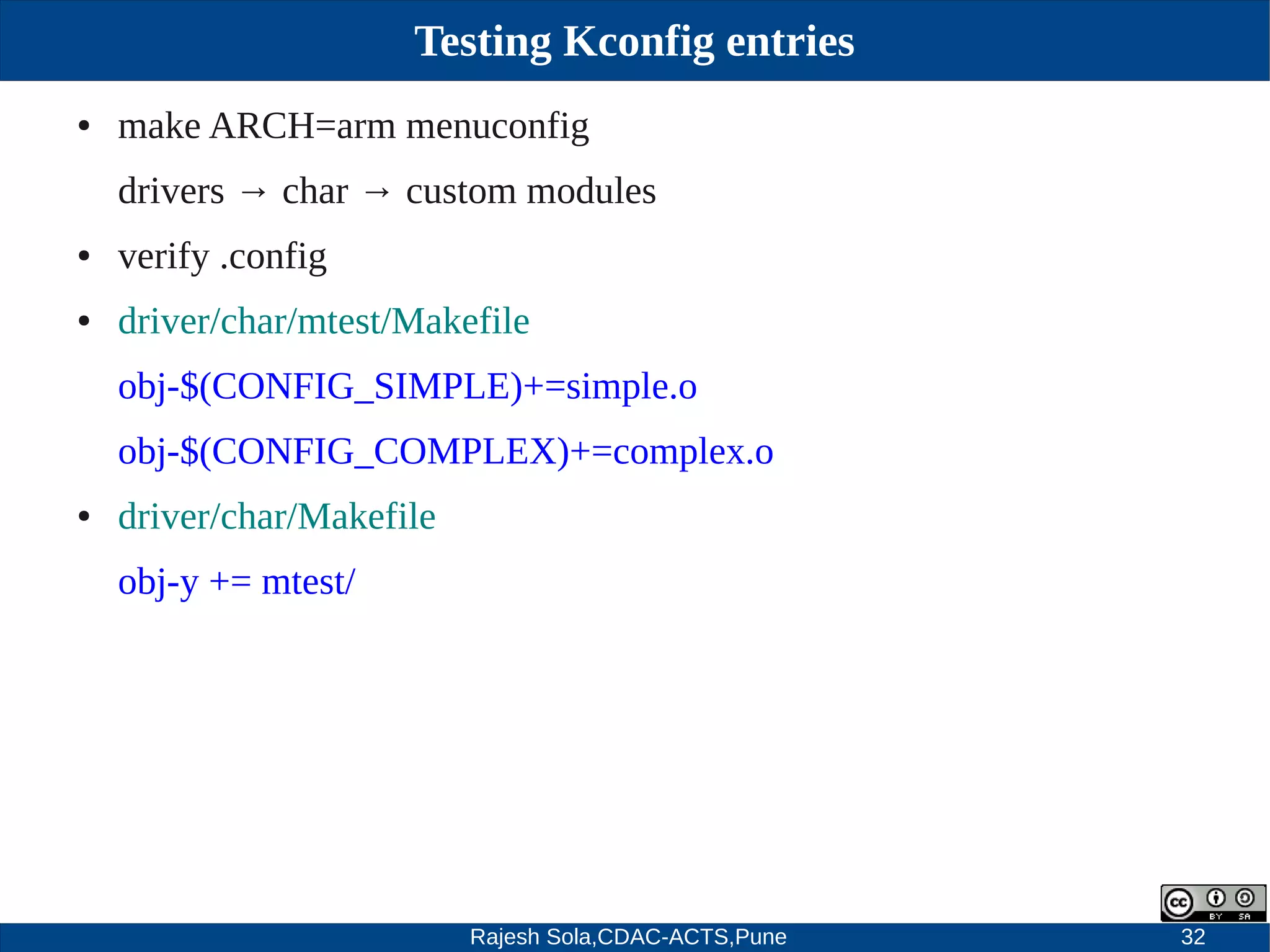
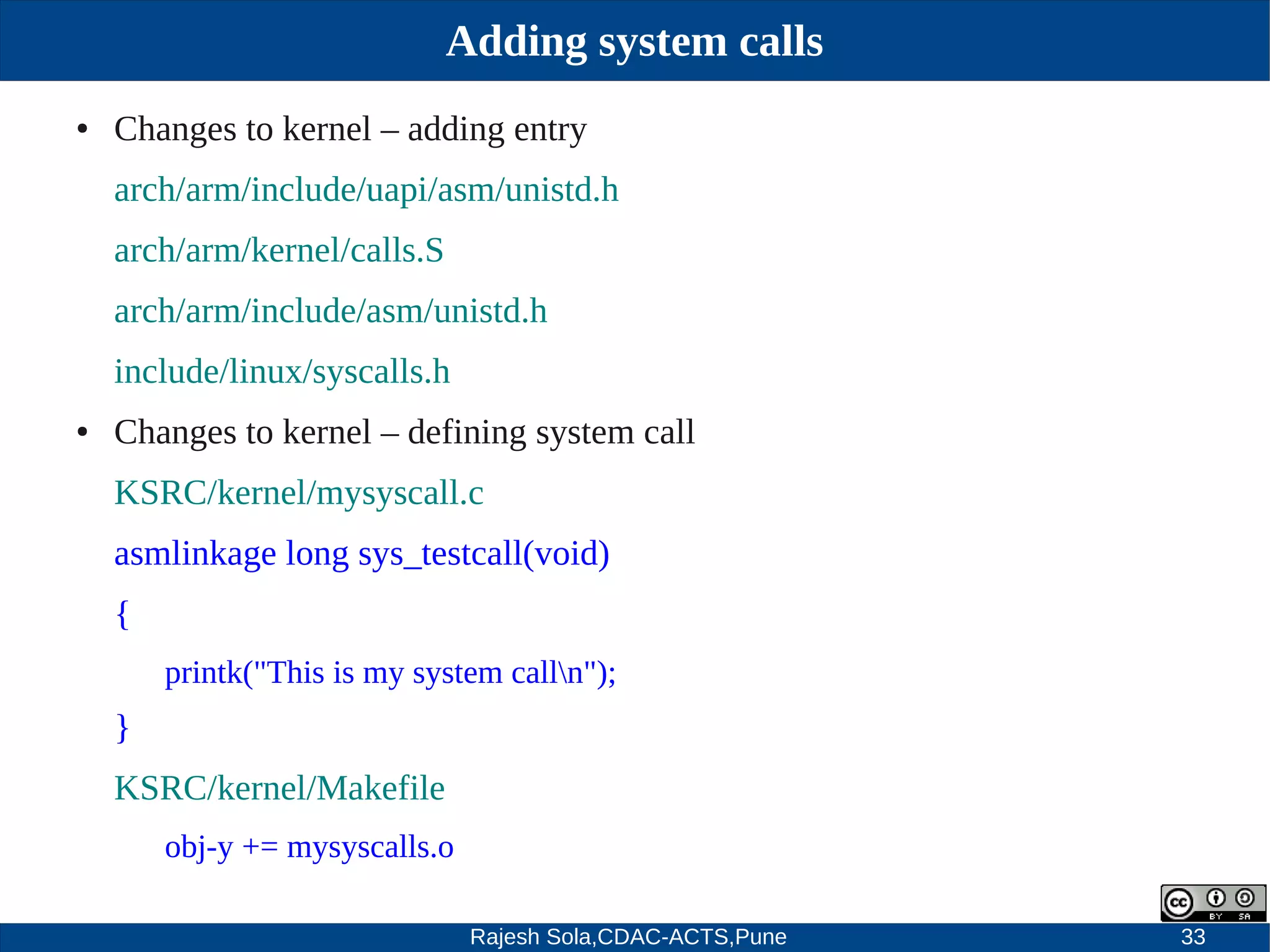
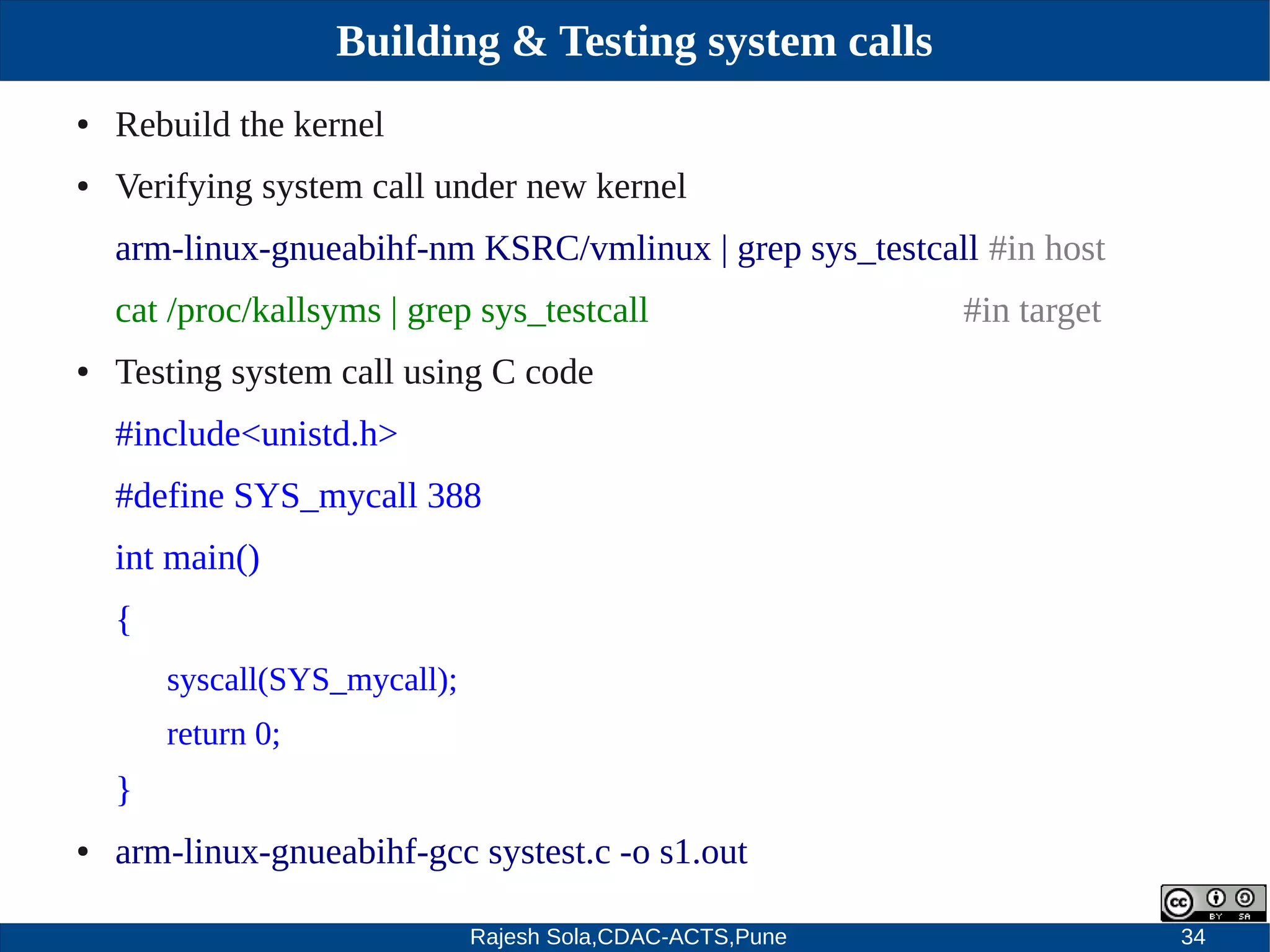


This document provides an overview of hands-on embedded Linux development using zero hardware. It discusses setting up a cross-development toolchain, building a Linux kernel and root filesystem for ARM, emulating the system using QEMU, and approaches for booting the system using U-Boot from an SD card or over a network using TFTP. The document also covers cross-compiling applications, creating static and dynamic libraries, and writing simple kernel modules.























































































