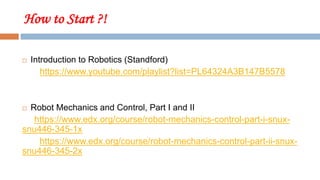
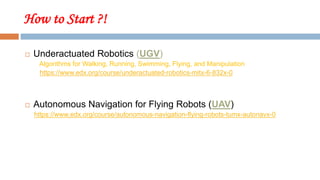
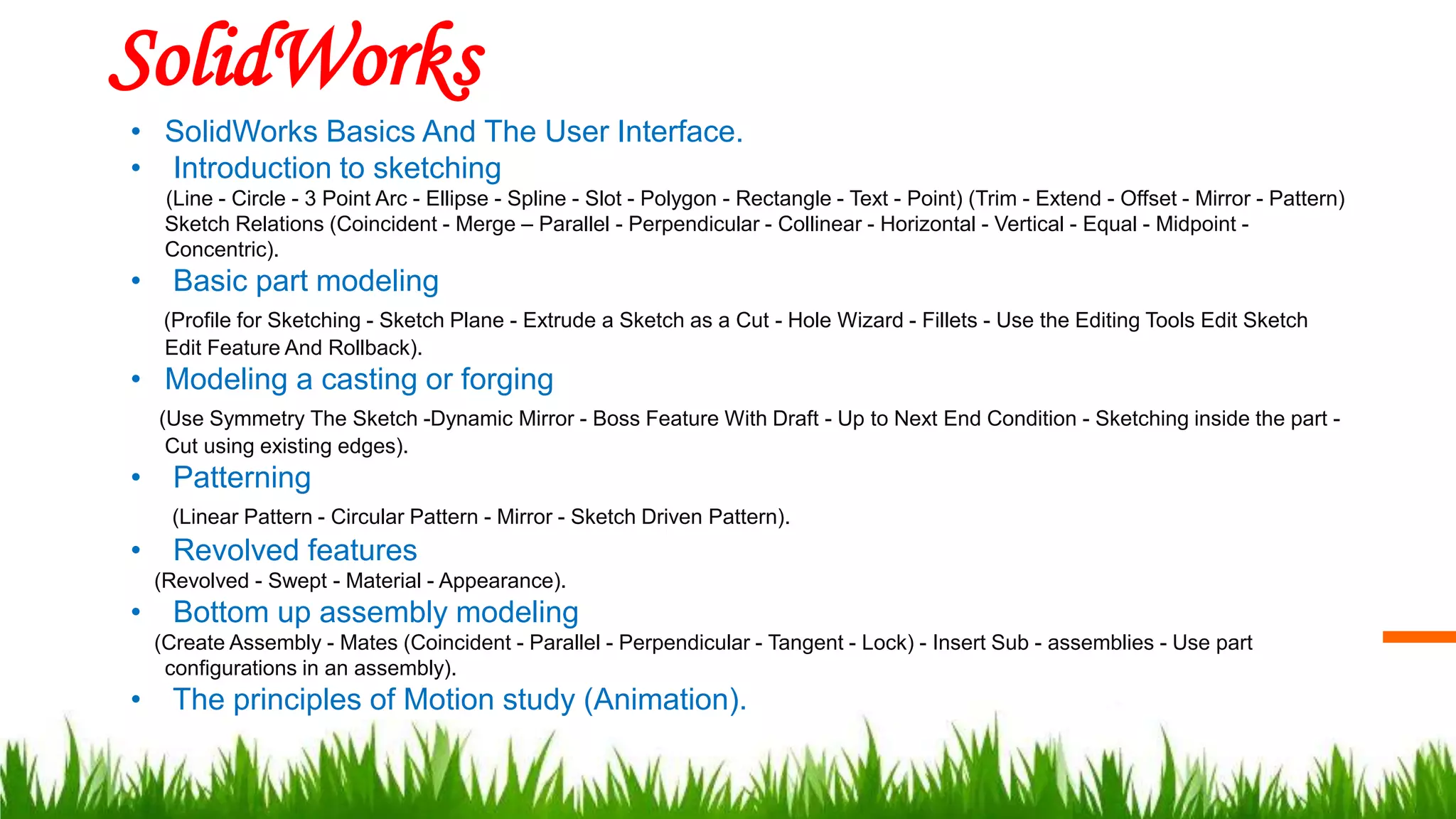
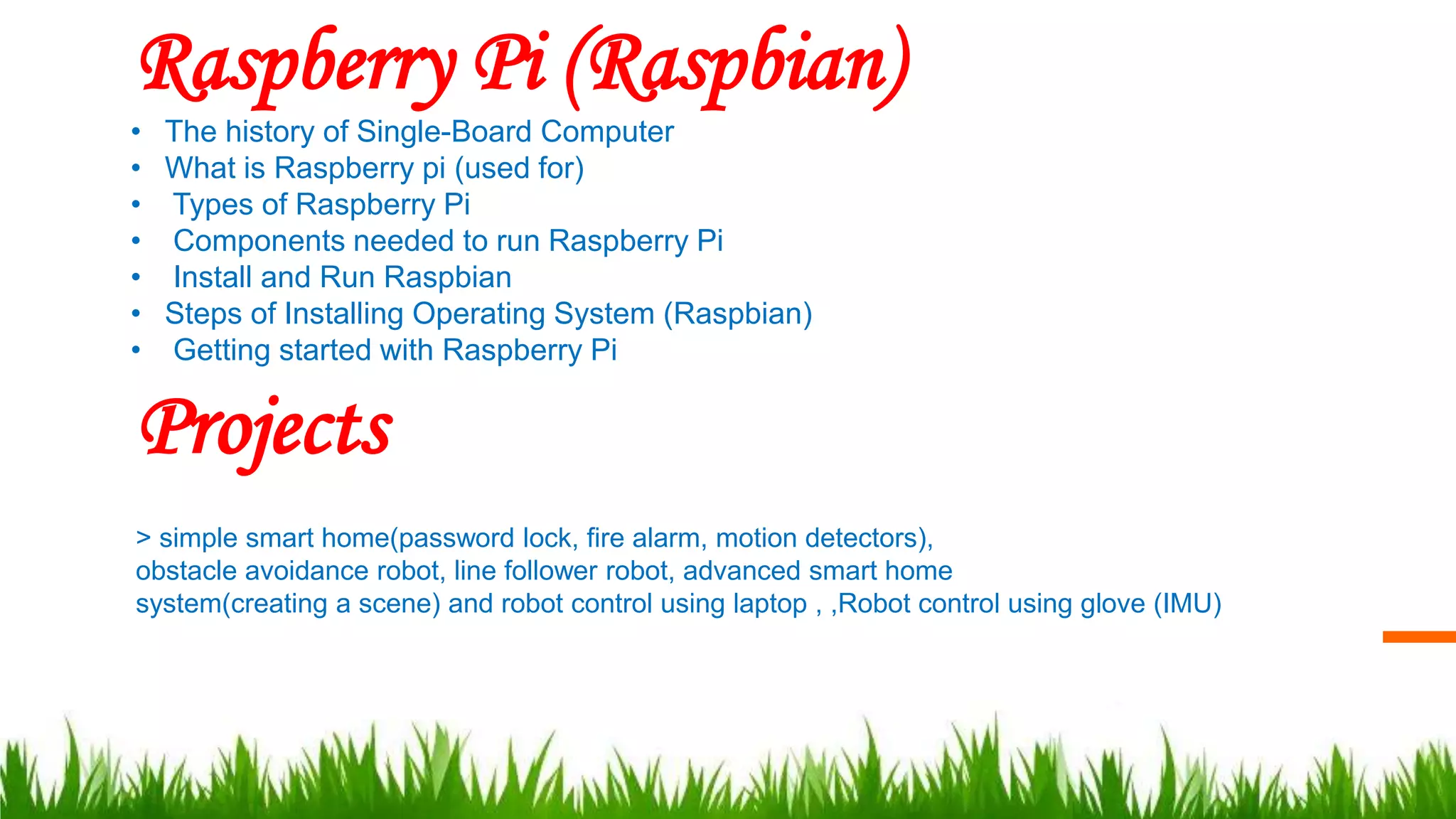
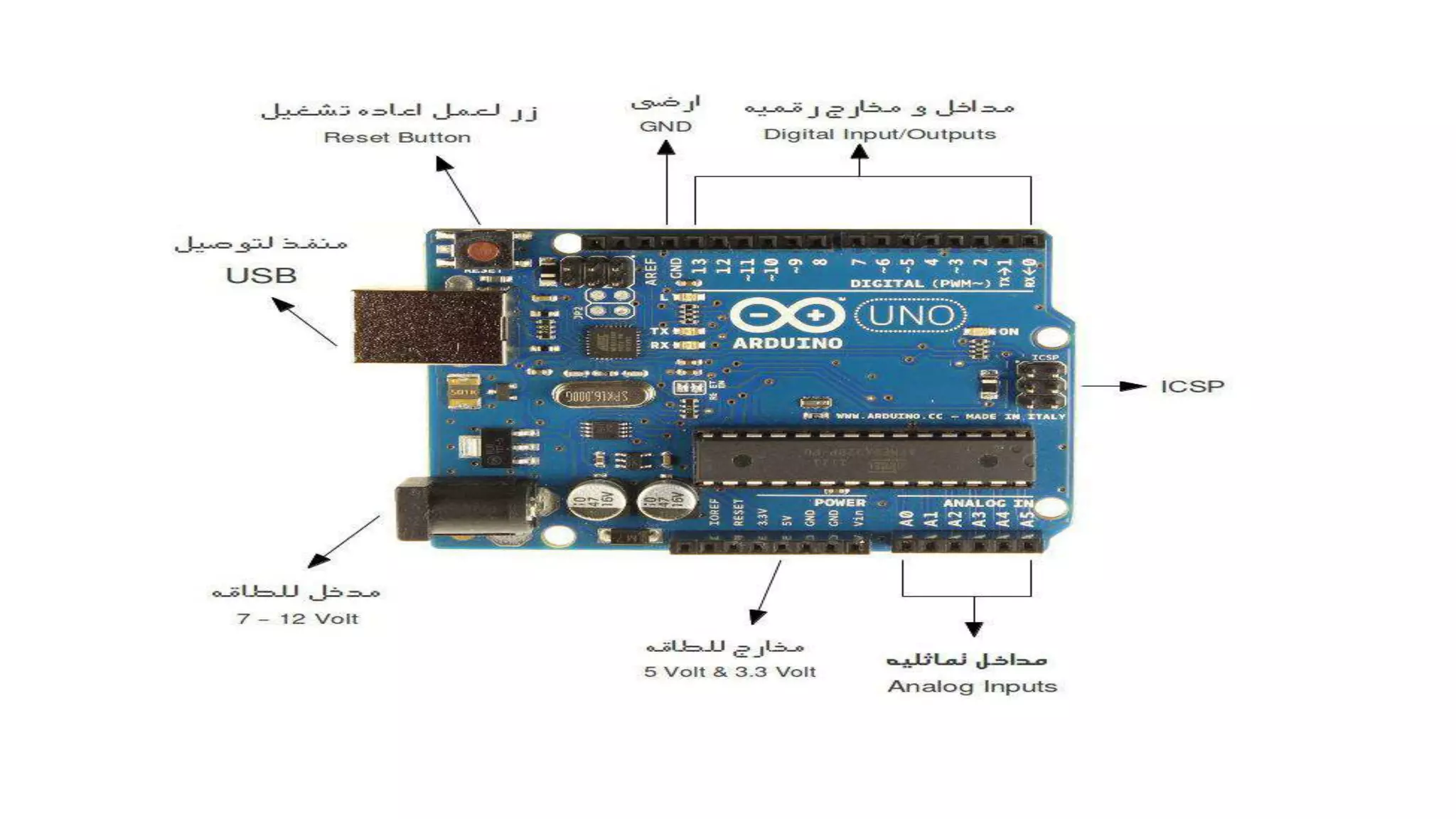
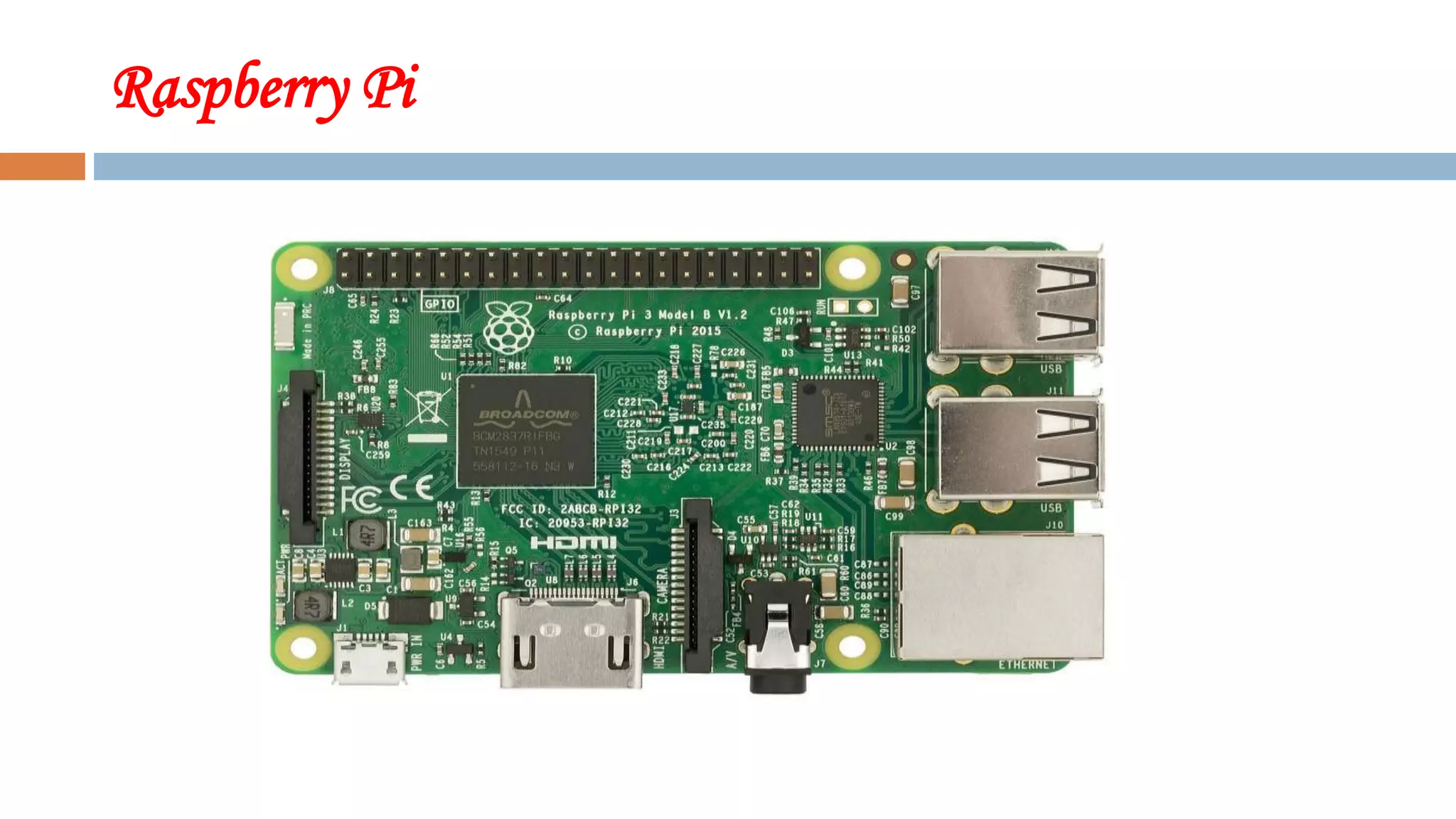
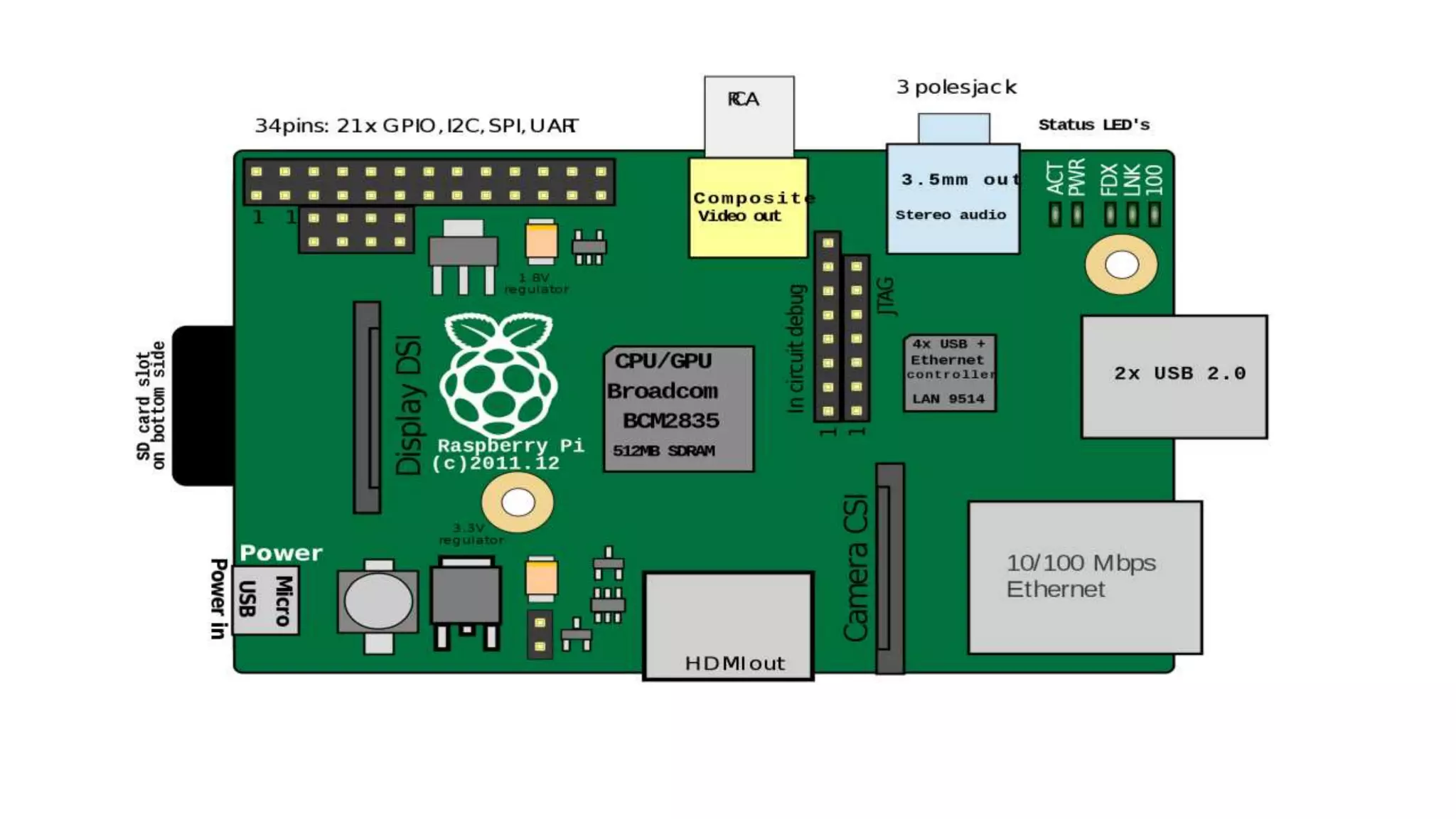
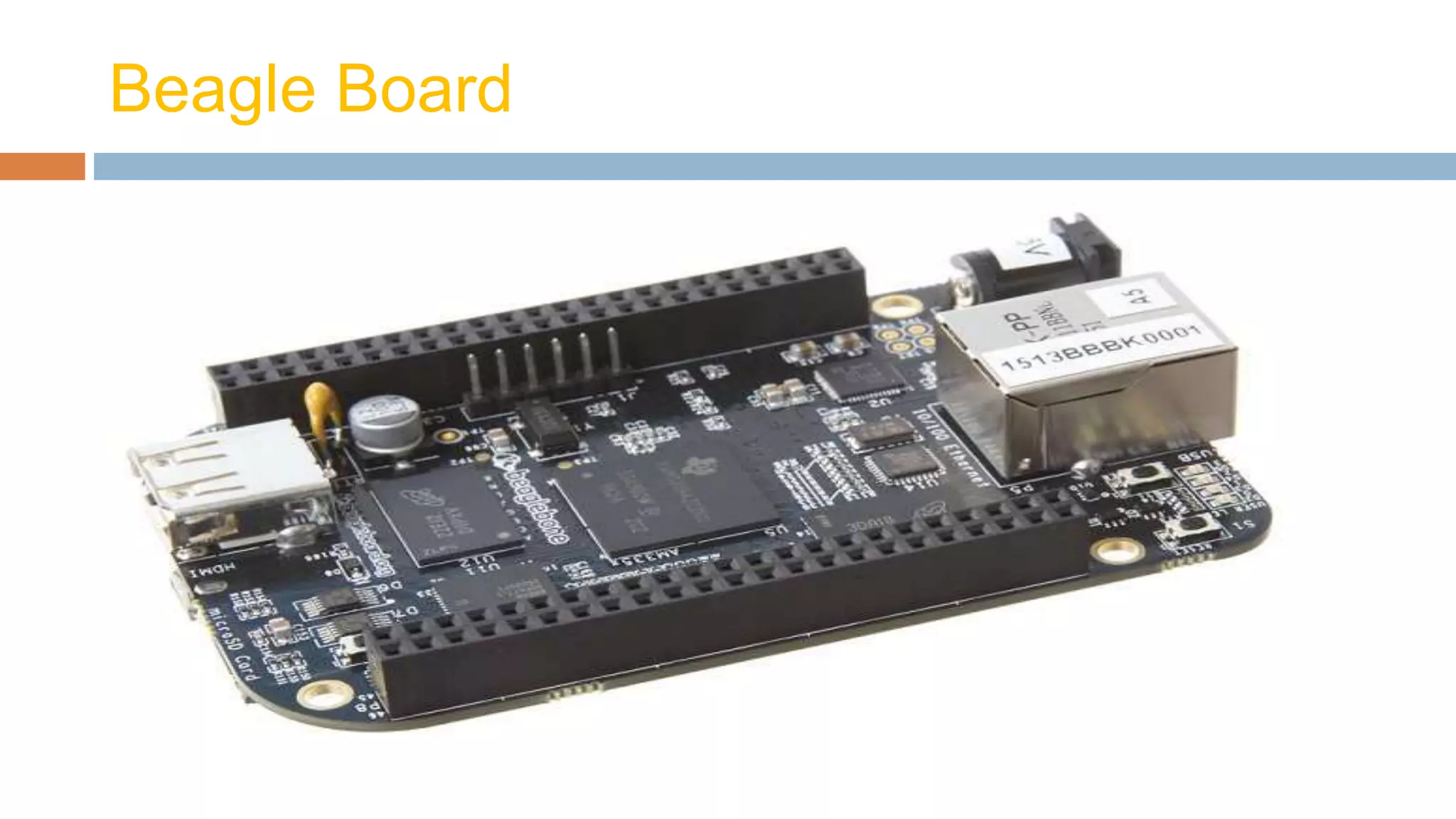
This document outlines a course on robotics and smart homes. It covers topics like basic electronics, Arduino, SolidWorks, Raspberry Pi, microcontrollers, and an introduction to robotics. The electronics section discusses components, circuits, and PCB design. Arduino topics include types, programming, sensors, communication protocols, and projects. SolidWorks tutorials cover sketching, modeling, patterning, and assembly. Raspberry Pi lessons involve installation, projects, and robot control. The document ends with discussions on autonomous navigation and how to get started in robotics.

























































































![UiPath Automation Suite Installation (Hands-On) [2/3]](https://cdn.slidesharecdn.com/ss_thumbnails/automationsuitecommunitysession2-251015095633-a6d862f1-thumbnail.jpg?width=600ounds&width=560&fit=bounds)
