Downloaded 762 times
![Contents:
Introduction on Arduino
1. What is Micro-Controller?
2. What is Arduino?
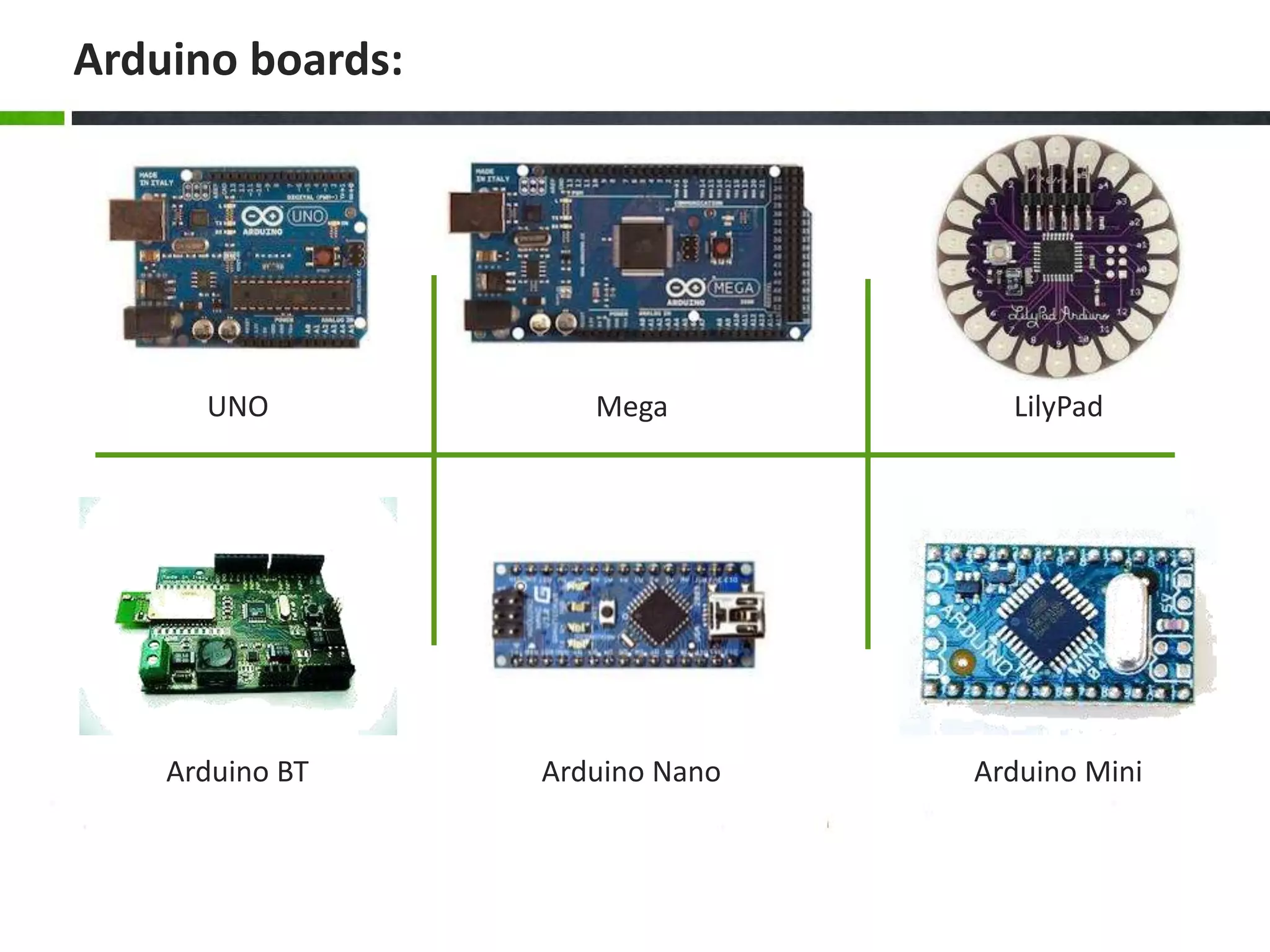
3. Types of Arduino.
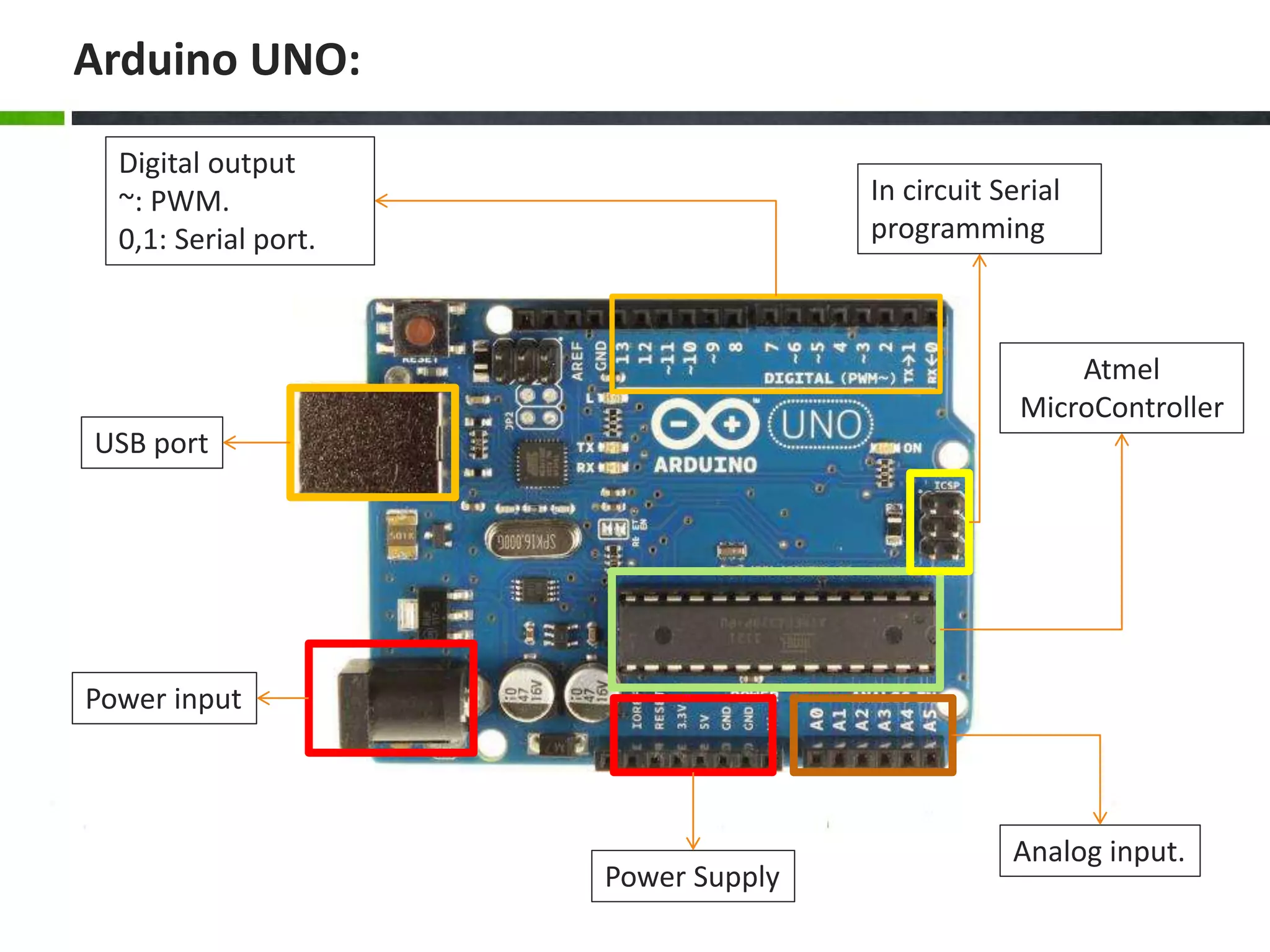
4. Arduino UNO board.
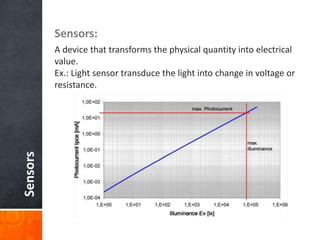
5. Sensors:.
6. What is “Function”?
7. Control statements [if, if… else, switch case.].
8. Loop statements[while, for, do… while.].
9. Common functions.
Workshop on robotics](https://image.slidesharecdn.com/main-170809144610/85/Introduction-to-Arduino-Robotics-2-320.jpg)

![Famous microcontroller
manufacturers are MicroChip,
Atmel, Intel, Analog devices, and
more.
[list]
It is a micro-computer. As any
computer it has internal CPU, RAM,
IOs interface.
It is used for control purposes, and
for data analysis.
Micro-Controller:](https://image.slidesharecdn.com/main-170809144610/85/Introduction-to-Arduino-Robotics-4-320.jpg)
![Digitalandanalog. Digital or Analog?
All physical quantities are analog.
Analog means that the quantity can take any value between its
minimum value and maximum value.
Digital means that the quantity can take specific levels of values
with specific offset between each other.
Ex: 1- Digital:
English alpha consists of 26 letter, there is no letter between A
and B.
- Square waves are Digital.
Ex.: 2- Analog:
Temperature, can take any value[-1,12.8,25.002,… etc.].
- Sine waves are analog.](https://image.slidesharecdn.com/main-170809144610/85/Introduction-to-Arduino-Robotics-8-320.jpg)
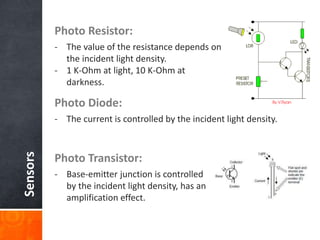
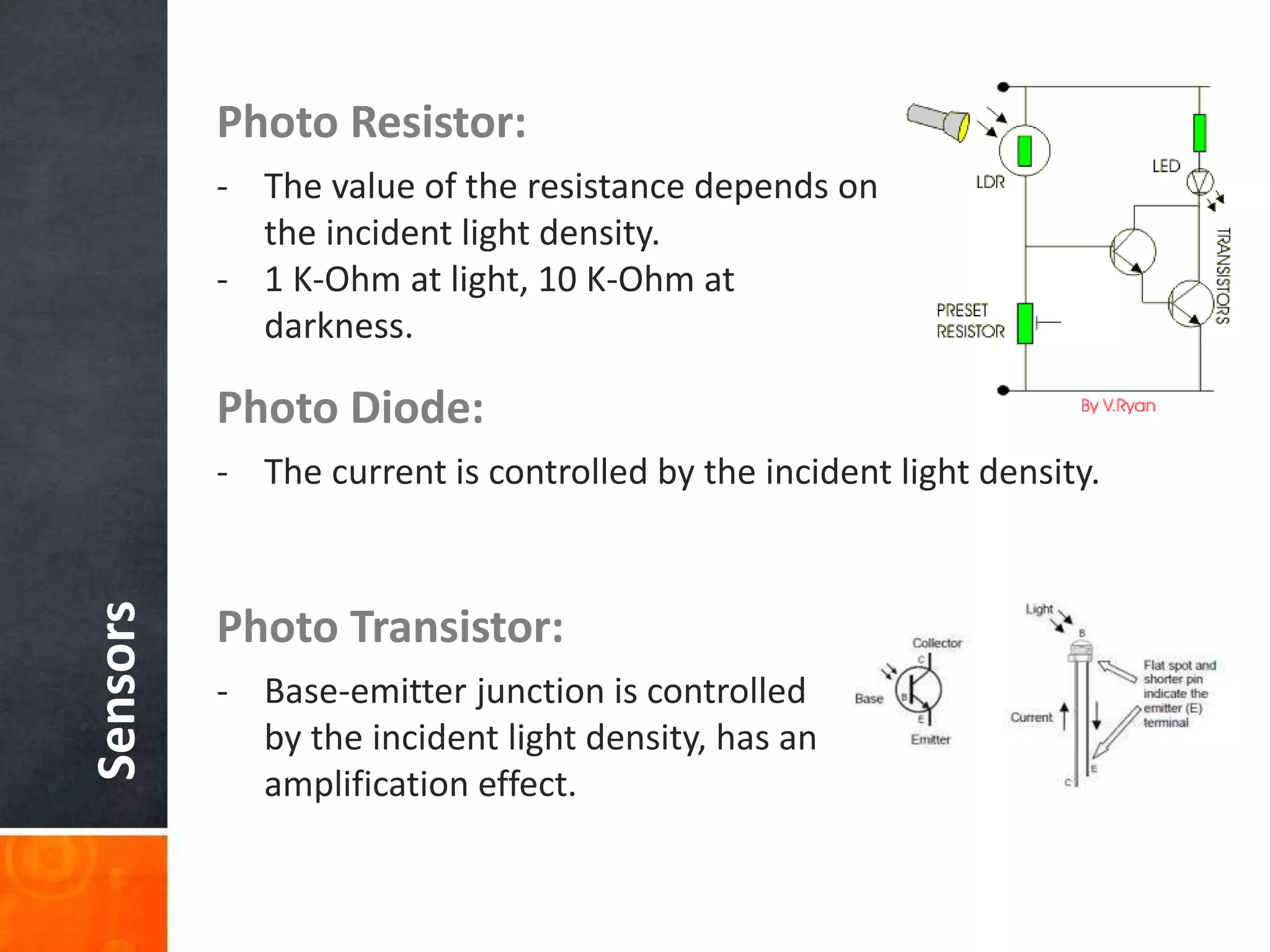
![Sensors Light sensors:
- Photo-Resistor [photo-cell].
- Photo-Diode.
- Photo-Transistor.](https://image.slidesharecdn.com/main-170809144610/85/Introduction-to-Arduino-Robotics-10-320.jpg)
![Integer: used with integer variables with value between
2147483647 and -2147483647.
Ex: int x=1200;
Character: used with single character, represent value from -
127 to 128.
Ex. char c=‘r’;
Long: Long variables are extended size variables for number
storage, and store 32 bits (4 bytes), from -2,147,483,648 to
2,147,483,647.
Ex. long u=199203;
Floating-point numbers can be as large as 3.4028235E+38
and as low as -3.4028235E+38. They are stored as 32 bits (4
bytes) of information.
Ex. float num=1.291; [The same as double type]
Data Types and operators
You may need to know about these typed: Array, Boolean, byte, etc. here.](https://image.slidesharecdn.com/main-170809144610/85/Introduction-to-Arduino-Robotics-13-320.jpg)
![Statement represents a command, it ends with ;
Ex:
int x;
x=13;
Operators are symbols that used to indicate a specific
function:
- Math operators: [+,-,*,/,%,^]
- Logic operators: [==, !=, &&, ||]
- Comparison operators: [==, >, <, !=, <=, >=]
Syntax:
; Semicolon, {} curly braces, //single line
comment, /*Multi-line comments*/
Statement and operators:](https://image.slidesharecdn.com/main-170809144610/85/Introduction-to-Arduino-Robotics-14-320.jpg)





![Contents:
Introduction on Arduino
1. What is Micro-Controller?
2. What is Arduino?
3. Types of Arduino.
4. Arduino UNO board.
5. Sensors:.
6. What is “Function”?
7. Control statements [if, if… else, switch case.].
8. Loop statements[while, for, do… while.].
9. Common functions.
Workshop on robotics](https://image.slidesharecdn.com/main-170809144610/75/Introduction-to-Arduino-Robotics-2-2048.jpg)
![Famous microcontroller
manufacturers are MicroChip,
Atmel, Intel, Analog devices, and
more.
[list]
It is a micro-computer. As any
computer it has internal CPU, RAM,
IOs interface.
It is used for control purposes, and
for data analysis.
Micro-Controller:](https://image.slidesharecdn.com/main-170809144610/75/Introduction-to-Arduino-Robotics-4-2048.jpg)
![Digitalandanalog. Digital or Analog?
All physical quantities are analog.
Analog means that the quantity can take any value between its
minimum value and maximum value.
Digital means that the quantity can take specific levels of values
with specific offset between each other.
Ex: 1- Digital:
English alpha consists of 26 letter, there is no letter between A
and B.
- Square waves are Digital.
Ex.: 2- Analog:
Temperature, can take any value[-1,12.8,25.002,… etc.].
- Sine waves are analog.](https://image.slidesharecdn.com/main-170809144610/75/Introduction-to-Arduino-Robotics-8-2048.jpg)
![Sensors Light sensors:
- Photo-Resistor [photo-cell].
- Photo-Diode.
- Photo-Transistor.](https://image.slidesharecdn.com/main-170809144610/75/Introduction-to-Arduino-Robotics-10-2048.jpg)
![Integer: used with integer variables with value between
2147483647 and -2147483647.
Ex: int x=1200;
Character: used with single character, represent value from -
127 to 128.
Ex. char c=‘r’;
Long: Long variables are extended size variables for number
storage, and store 32 bits (4 bytes), from -2,147,483,648 to
2,147,483,647.
Ex. long u=199203;
Floating-point numbers can be as large as 3.4028235E+38
and as low as -3.4028235E+38. They are stored as 32 bits (4
bytes) of information.
Ex. float num=1.291; [The same as double type]
Data Types and operators
You may need to know about these typed: Array, Boolean, byte, etc. here.](https://image.slidesharecdn.com/main-170809144610/75/Introduction-to-Arduino-Robotics-13-2048.jpg)
![Statement represents a command, it ends with ;
Ex:
int x;
x=13;
Operators are symbols that used to indicate a specific
function:
- Math operators: [+,-,*,/,%,^]
- Logic operators: [==, !=, &&, ||]
- Comparison operators: [==, >, <, !=, <=, >=]
Syntax:
; Semicolon, {} curly braces, //single line
comment, /*Multi-line comments*/
Statement and operators:](https://image.slidesharecdn.com/main-170809144610/75/Introduction-to-Arduino-Robotics-14-2048.jpg)



This document provides an introduction to Arduino and robotics. It begins with an overview of Arduino, including the different types of Arduino boards such as the Arduino UNO. It then discusses sensors that can be used with Arduino like light sensors. The document covers Arduino coding concepts such as data types, statements, operators, and control structures. It also introduces robotics, including the components of robots like sensors, controllers, effectors, and actuators. Examples of different actuator types are given. Finally, the document briefly discusses the scope of the robotic industry in Bangladesh and provides some resource links.
Introduction to the presenter and overview of Arduino, micro-controller basics, types, and sensors.
Introduction to microcontrollers, essentials of Arduino boards, and key features of Arduino as an accessible hardware.
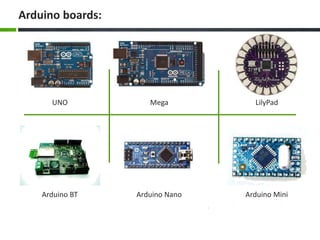
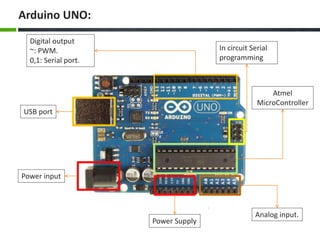
Various types of Arduino boards (UNO, Mega, etc.) and functionalities of the Arduino UNO including inputs and outputs.
Difference between digital and analog signals; examples illustrating both concepts.
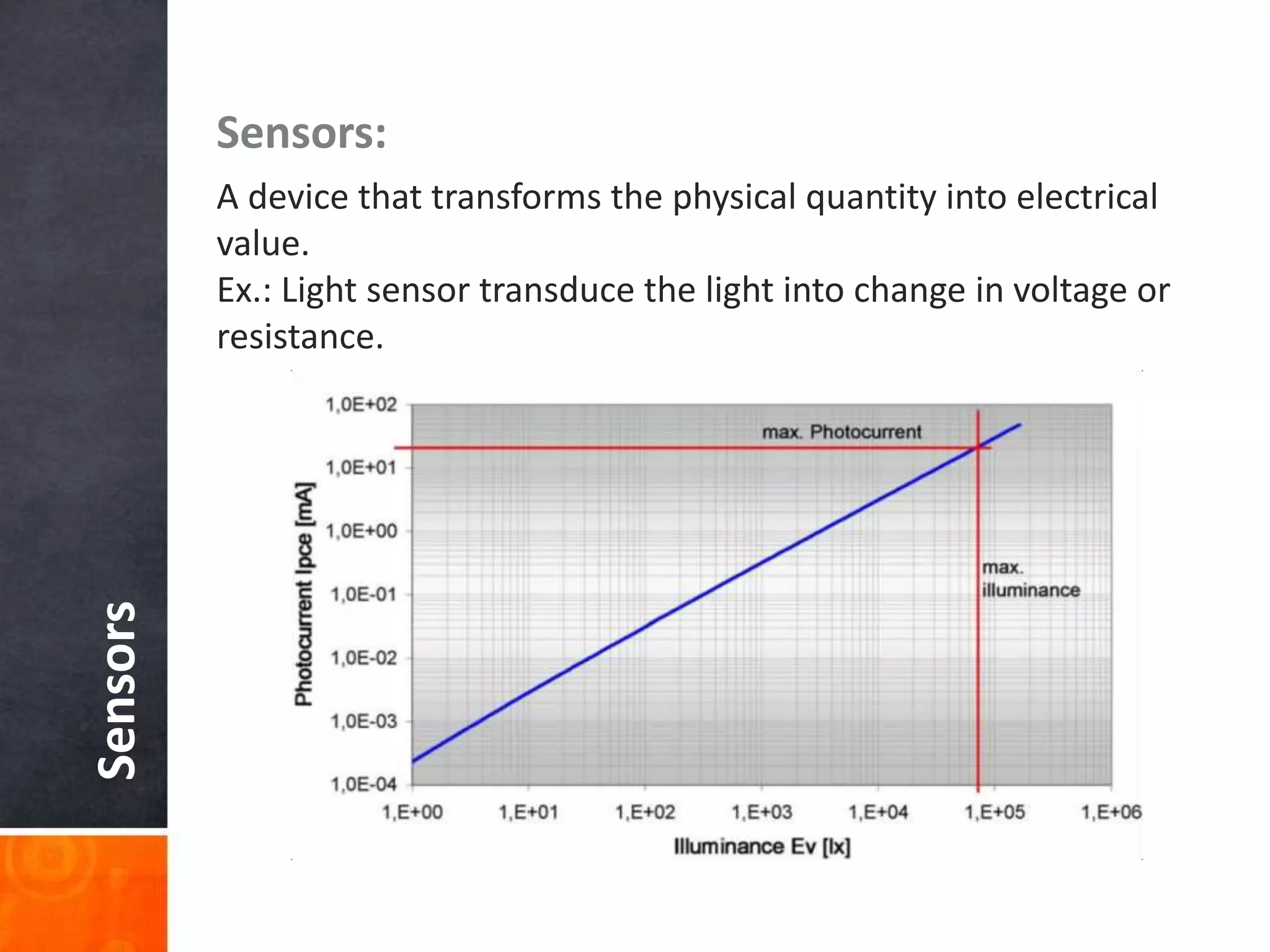
Introduction to sensors, their functions and specific types like light sensors and their operational principles.
Overview of programming concepts in Arduino, including data types, operators, and basic coding structure.
Fundamentals of control statements in Arduino like if-else conditions, switch-case, loops, and their usage.
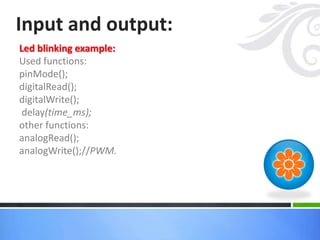
Basic structure of Arduino programs, focusing on setup and loop functions, with practical application on LED blinking.
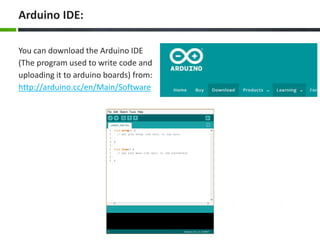
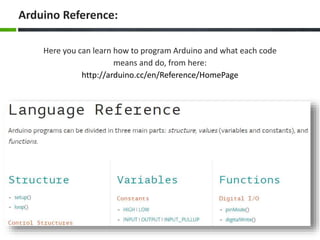
Information on how to download Arduino IDE and reference resources for learning Arduino programming.
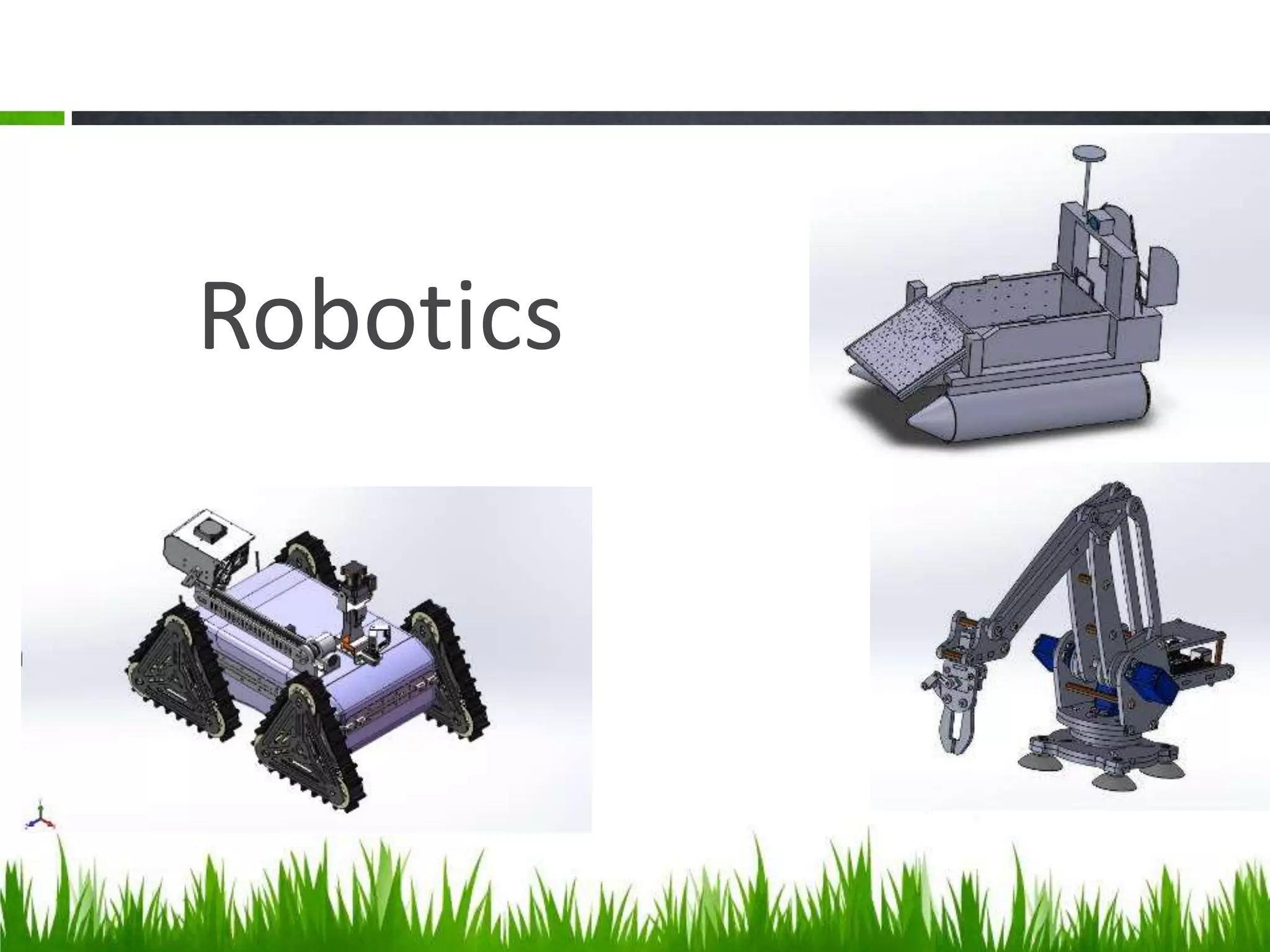
Definition and scope of robotics, including the integration of various engineering fields in robotics.
Overview of Isaac Asimov's laws of robotics and diverse applications of robotics across industries.
List of leading companies in the global robotics industry, showcasing a variety of innovative firms.
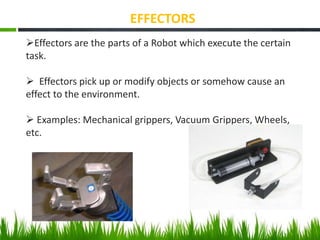
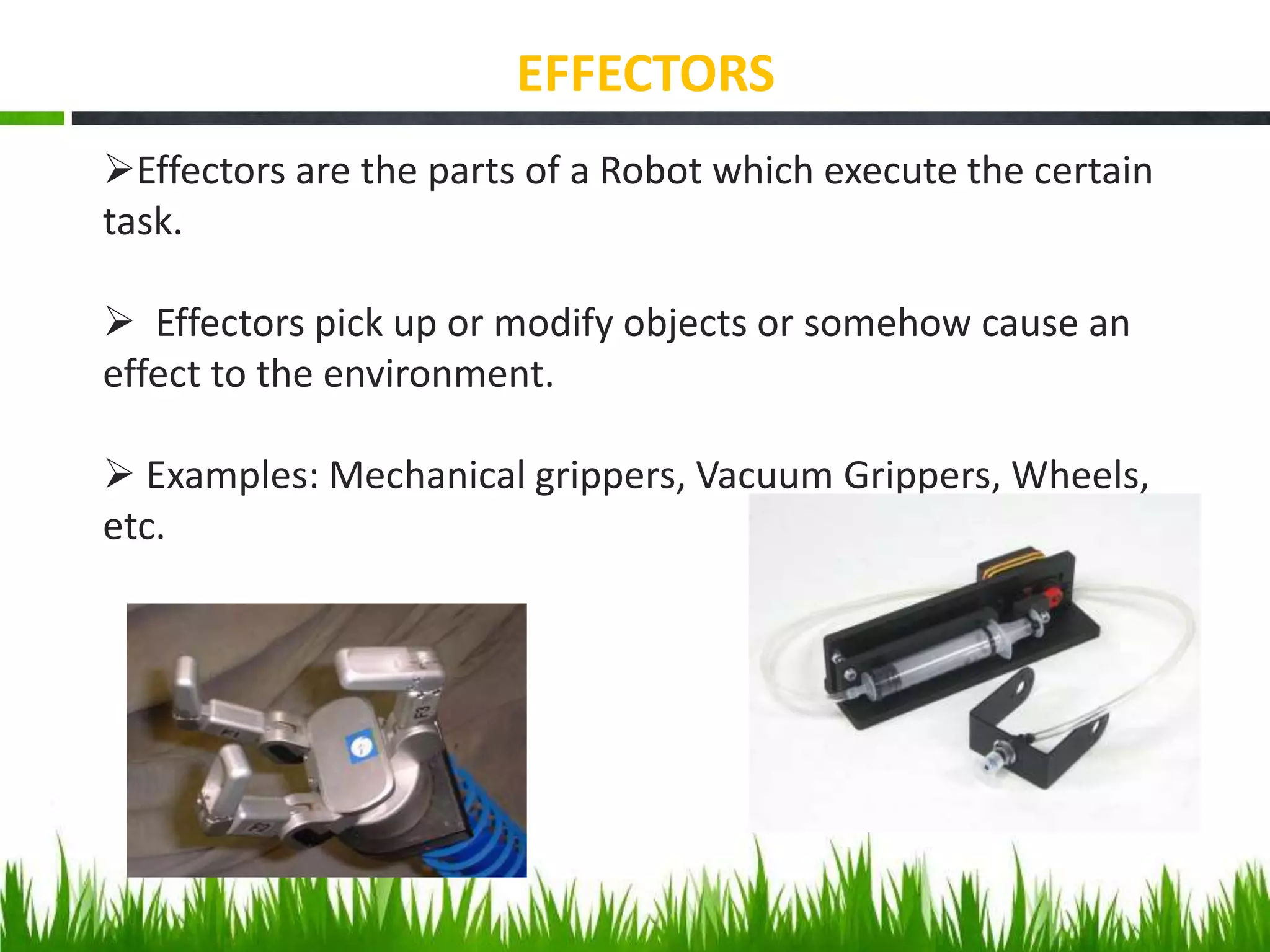
Key components needed for robotic systems including power supplies, sensors, effectors, and actuators.
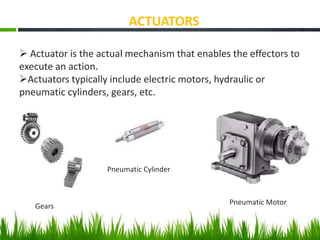
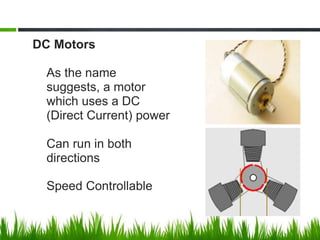
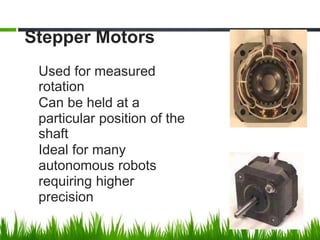
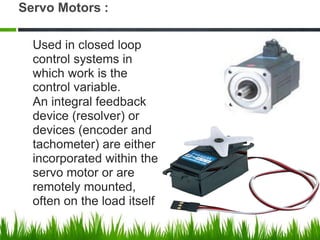
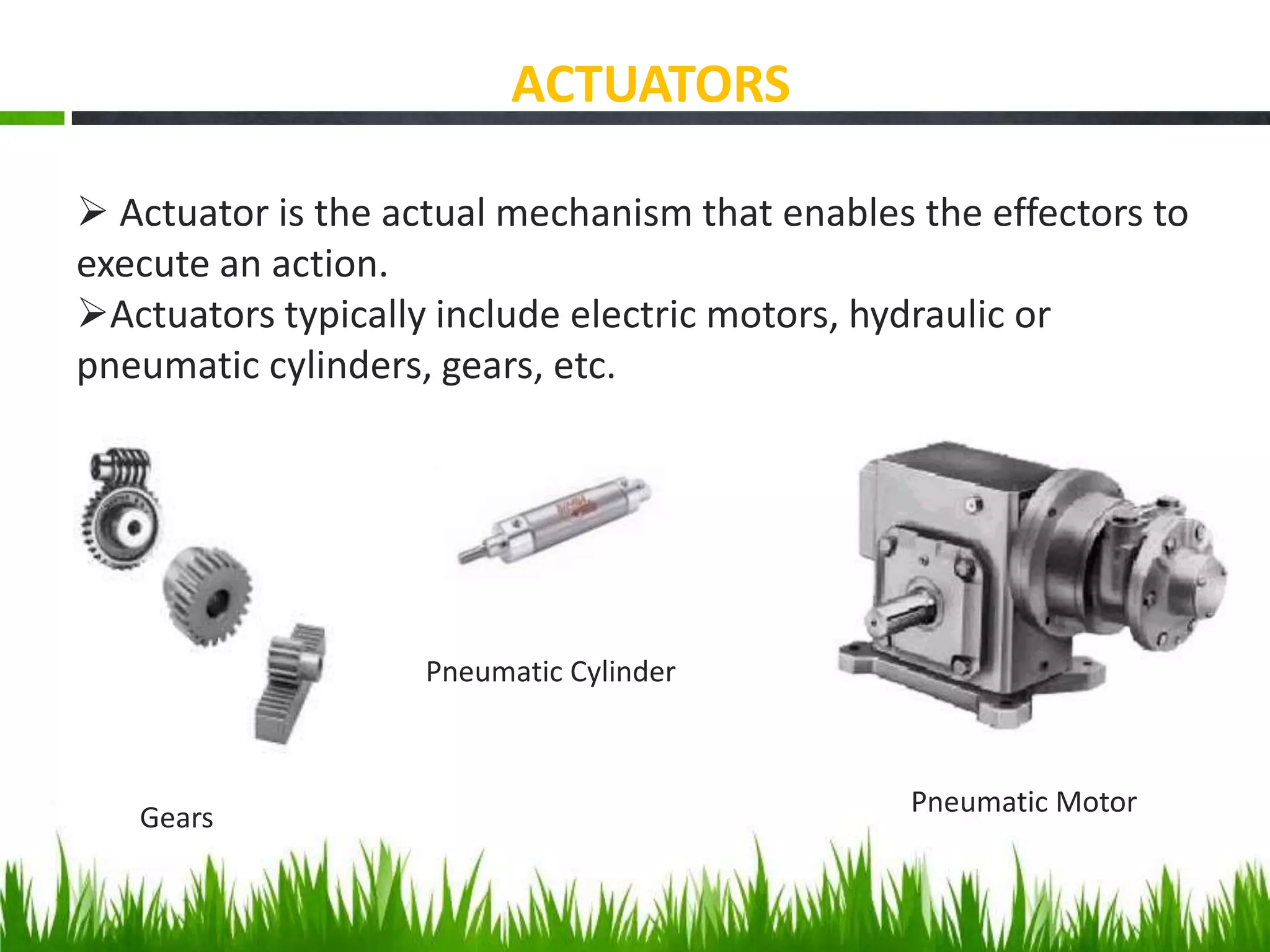
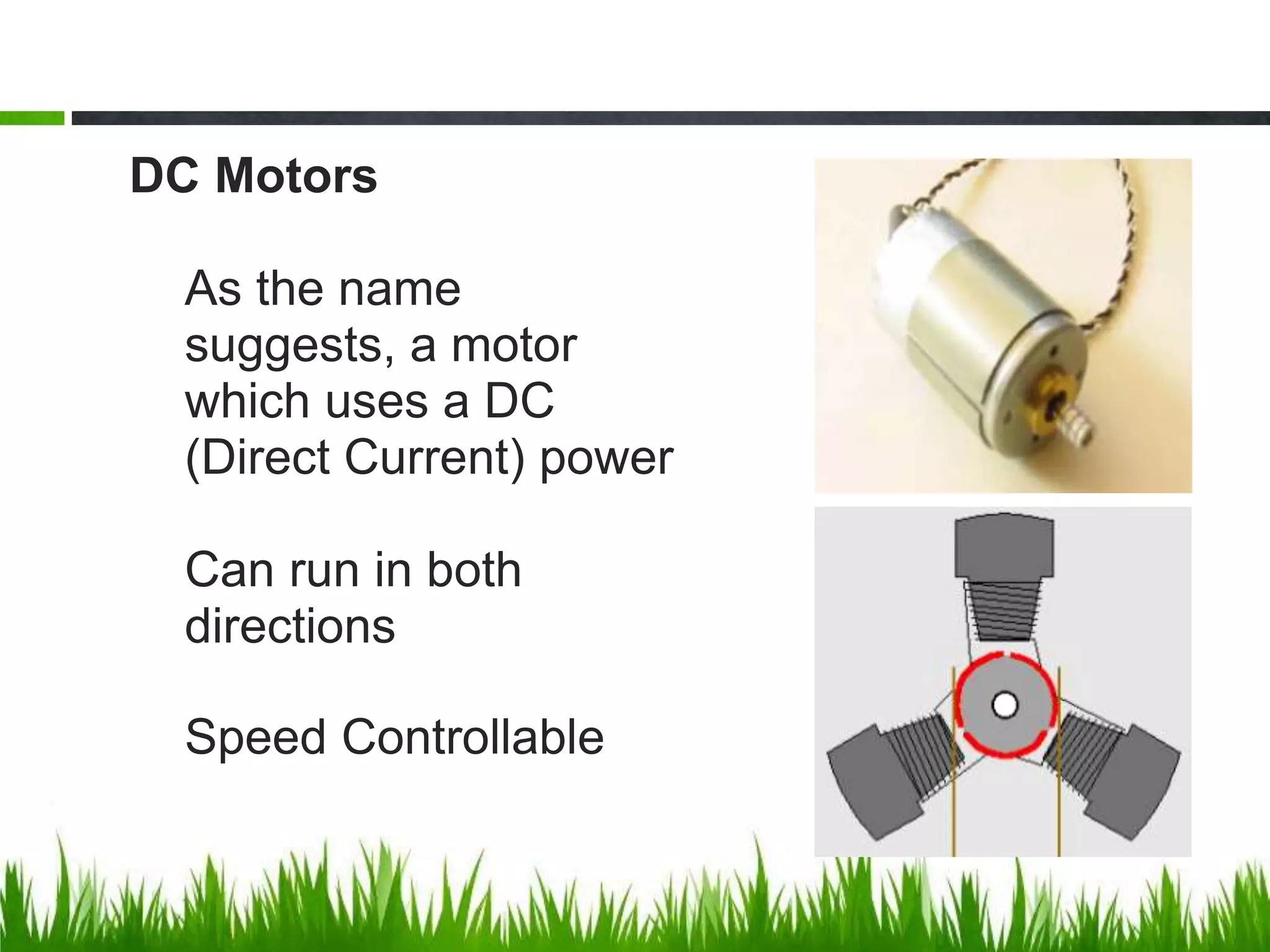
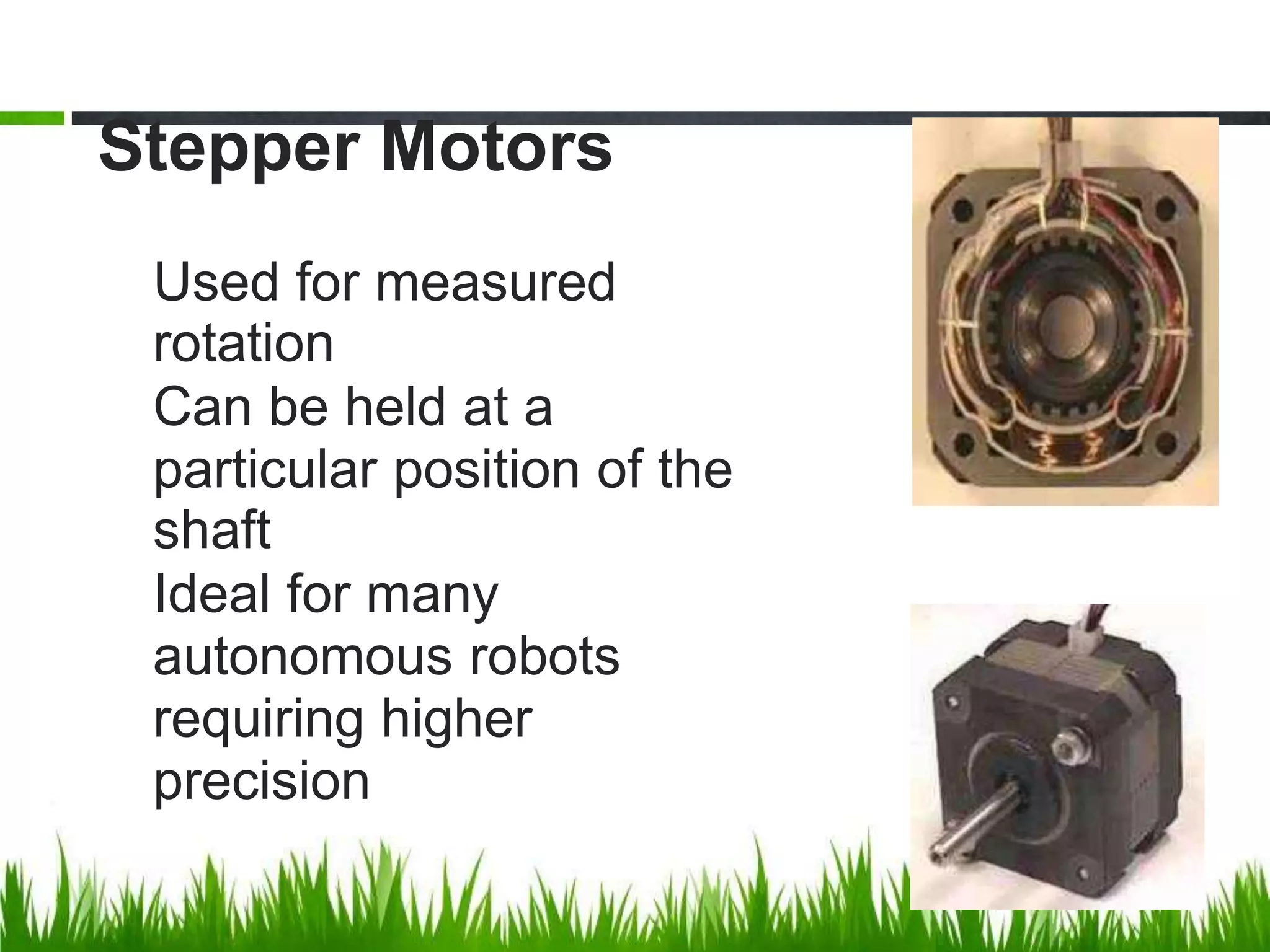
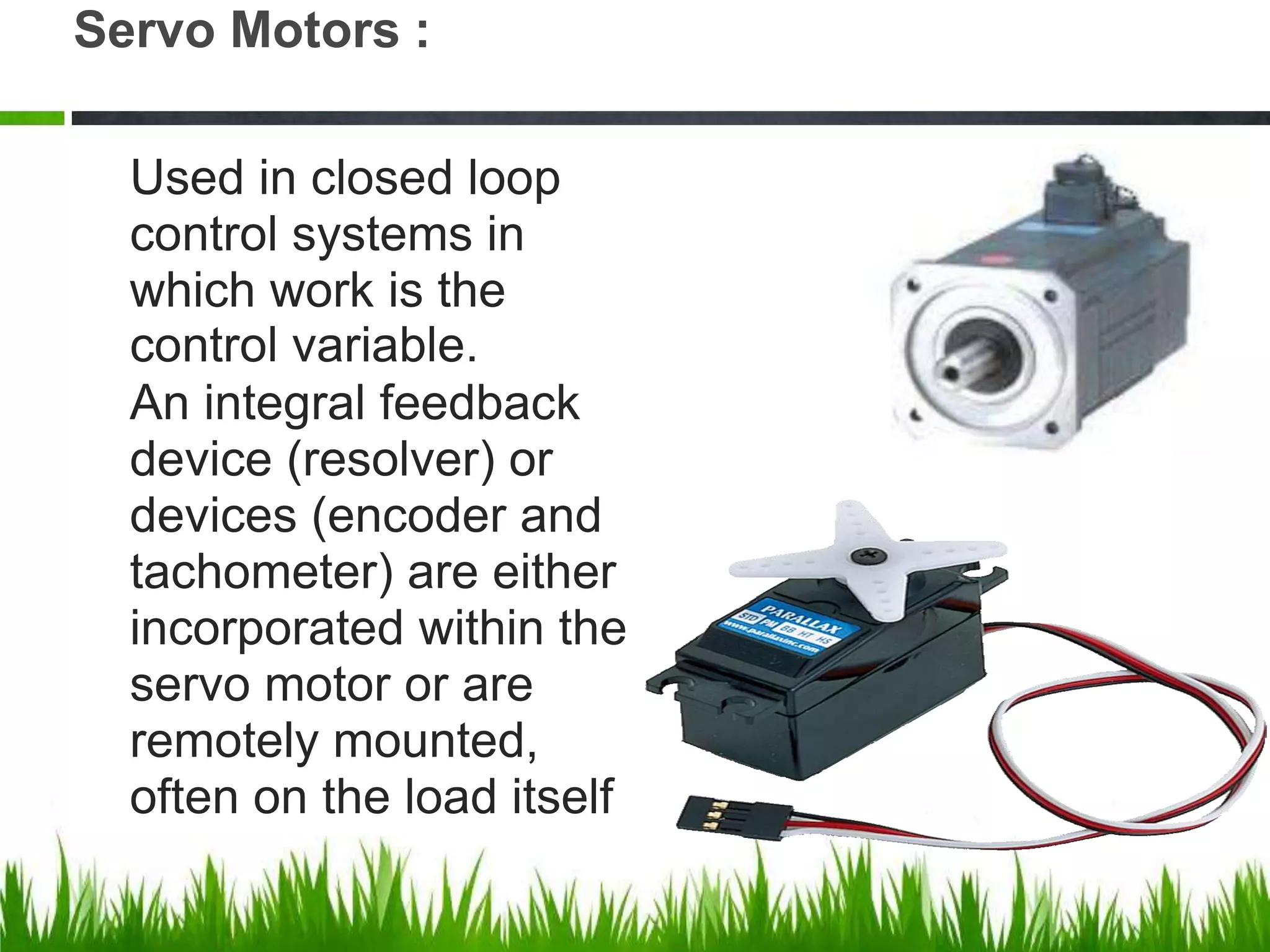
Different kinds of motors (DC, stepper, and servo) used in robotics and their specific functions.
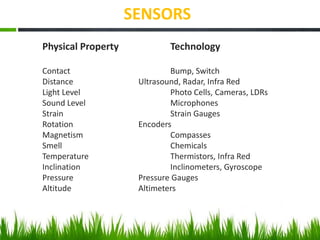
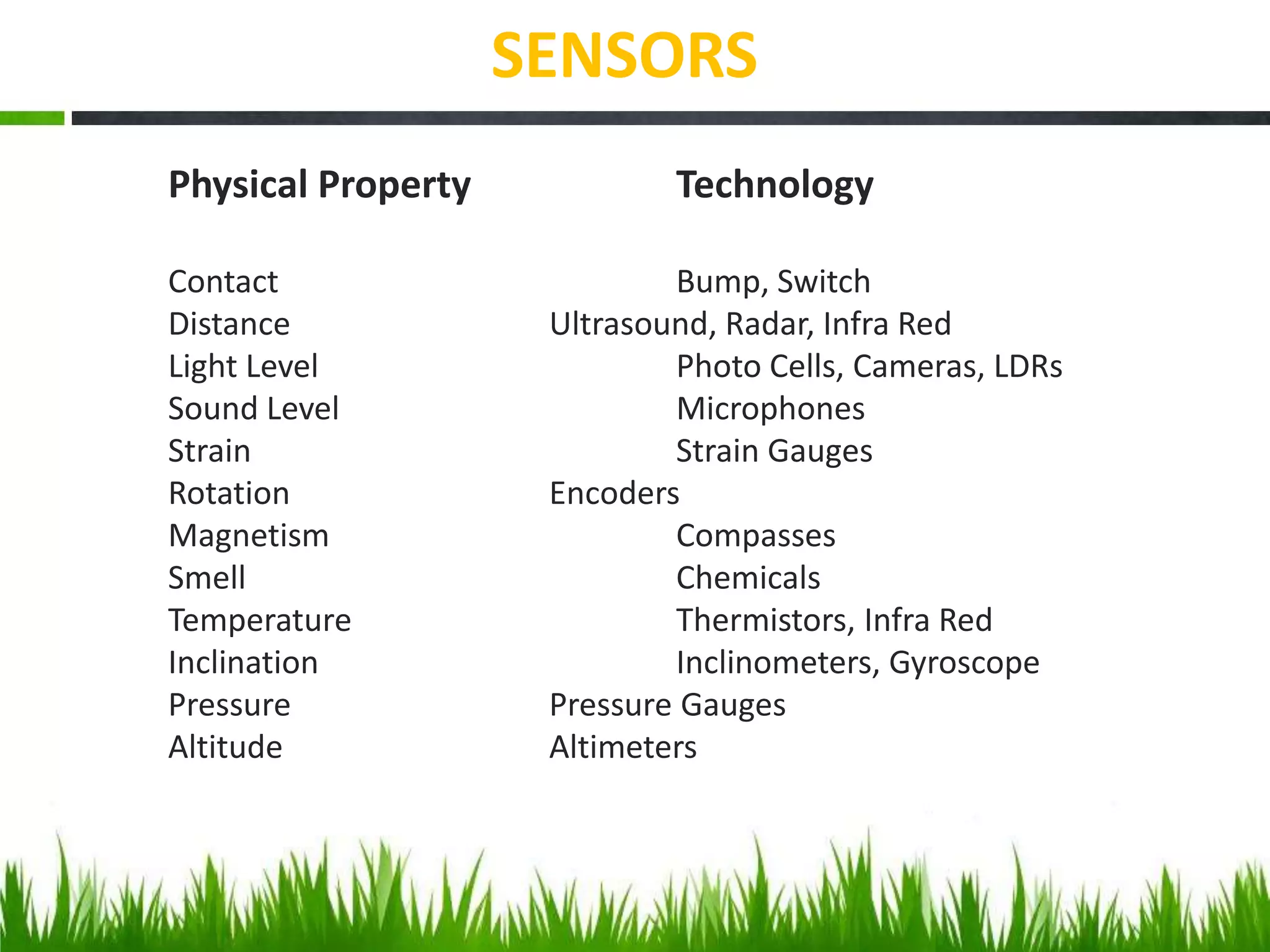
Various types of sensors used in robotics, including their applications in detecting physical properties.
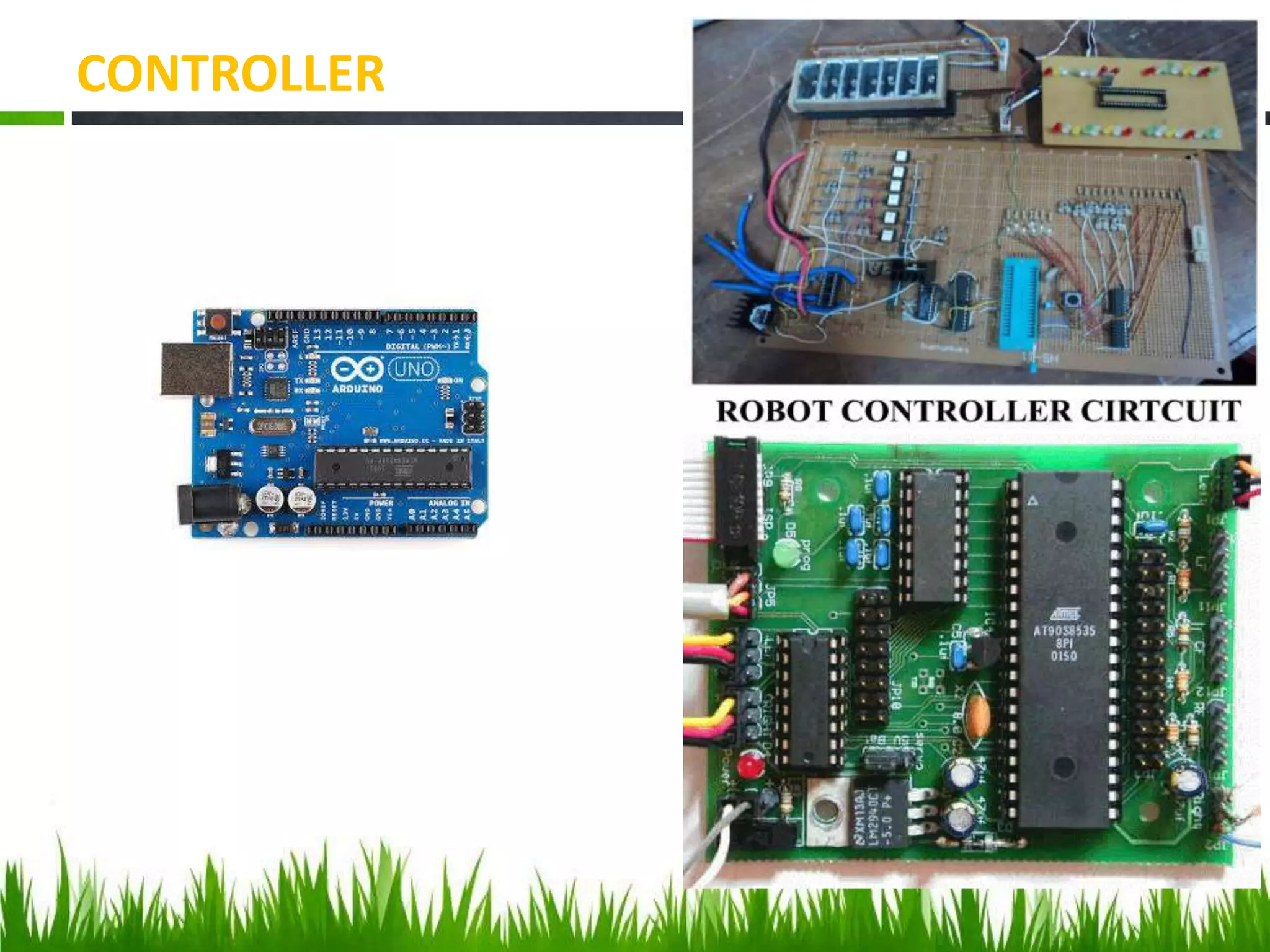
Role of controllers in robotics, explaining their function and how they utilize information from sensors.
Exploration of opportunities and future potential of the robotics industry within Bangladesh.
Useful links for further exploration of robotics projects and a thank you note from the speaker.












































































